國內外動態
2013-10-31 06:54:12杜宗瀠
微特電機 2013年1期
關鍵詞:設計
為輕型機械臂提供的驅動電機
UR 5和UR 10是Universal Robots公司為提高工業生產靈活性推出的兩款新型機械臂。現在工作區域面臨的問題是傳統機器人太大、太昂貴,噪聲也大。由于UR 5和UR 10重量輕,所以可用于任何有需要的地方。六關節機器人的功率密度很大一部分來自于科爾摩根公司特殊改裝的KBM直驅電機。Universal Robots能將電機直接嵌入關節運動軸中,無需增加底座。
UR 5和UR 10是特意為中小型企業開發的機械臂型號。這兩款機械臂可處理5~10 kg的有效載荷,但其自身重量僅為18 kg和25 kg。輕型的重量使得它能方便移動,無需復雜的子組件。這些多功能機器人在操作時也同樣靈活,這得益于其用戶友好型軟件。這一多功能性可通過用戶友好型軟件為丹麥公司提供支持。正因如此,六軸輕型機器人可在任何時候從事新的任務,無需專業的機器人知識也可進行編程。
(1)模塊化設計
凈重和承載力的特殊比率是先進的輕質結構帶來的結果,它不含任何冗余組件。采用該驅動技術后,這種極簡策略意味著可將科爾摩根的無框組件電機直接集成至關節軸中。這樣,機器人可起到電機底座的功能,同時減速機可用作轉子的主軸承。整體來看,UR所使用的組件通常擁有多功能,并最終大大減少了機械部件使用,如球軸承、聯軸器或軸,從而減少了整個系統的重量和外觀大小。此外,由于擁有高功率密度,科爾摩根電機增加了UR 5和UR 10平臺的起重能力,同時KBM電機也增加了UR 5和10 UR的起重能力。
例如,用于加工和生產設施中的六軸機器人,它們可通過編程輕松完成重復性任務,如圖1所示(圖片由Universal Robots公司提供)。
KBM電機通過空間優化方式為伺服軸配置提供了較大的自由度,它擁有可變的模塊化設計,如圖2所示(圖片由科爾摩根公司提供)。
圖1 用于加工和生產設施中的六軸機器人

圖2 空間優化的伺服軸
KBM電機系列為優化扭矩、最小化齒槽和諧波失真采用了先進的電磁設計。這些優勢還通過大的工作轉速范圍得以體現。定子中擁有高填充密度的電磁技術可增大扭矩,并保持更低的熱損耗。轉子中使用的是高強度的稀土磁鐵,它可產生1.45~3445 N·m的連續扭矩,峰值扭矩為4.91~12812 N·m。
UR 5和UR 10采用科爾摩根KBM電機設計,可直接集成于軸關節中,無需底座,如圖3所示(圖片由Universal Robots公司提供)。

圖3 采用KBM電機設計的UR 5和UR 10
鑒于KBM電機可嵌入機器人底座中,并直接驅動負載,因此該機器人可進行高精度的水平運動和力度控制。有針對性的力度控制在此至關重要,因為機器人需不斷完整地移動不同的高易變性工件。在操作過程中,它們能識別對象的大小和柔性,并相應地調節所施加的力。該力度需大于25 N才能操作。由于擁有±10 N的精度和±5 mm的精確性,所以可對所需要的力度和所期望的位置進行編程,并能作用于每個關節。
(2)操作時無噪聲,能效高
該機器人的另一個優勢是運行時噪聲低,還節能。從總擁有成本來看,節能減耗可直接提高機器人的整體效率,從而增強其技術競爭力。高能效還與電機損耗的減少密切相關。效率越高,生成的熱量就越少。這意味著電機發熱小,在低于其最大額定值下操作時,其使用壽命更長。改進后的溫度特性還可防止整個結構升溫。“我們以前使用的電機在連續運行時容易發熱。由于損耗更低,科爾摩根的KBM電機可保持不致過熱。因此,我們的機器人可以在不降容的情況下持續運行,”UR公司?stergaard指出,尤其是針對擁有較長操作周期和相對高負荷的測試程序。
KBM系列是科爾摩根提供的創新型直驅無框電機技術。該無框電機套件可為機械和設備工程提供廣泛的解決方案,用于創建靈活性、功率密度、動力和耐用性最大的應用。KBM平臺除了可提供技術優勢外,還包括14個框架設計及許多預先設計的交貨周期短的標準配件。“無論何時無論多少,我們基本上都能訂到我們想要的電機,”?stergaard強調。在這方面,科爾摩根公司通過其交貨可靠性給丹麥機器人專家留下了深刻印象,并因此在捷克布爾諾市建立了一個UR專用生產線。
圖4為專為生產中協同工作設計的丹麥機器人,與工作人員進行密切合作(圖片由科爾摩根公司提供)。
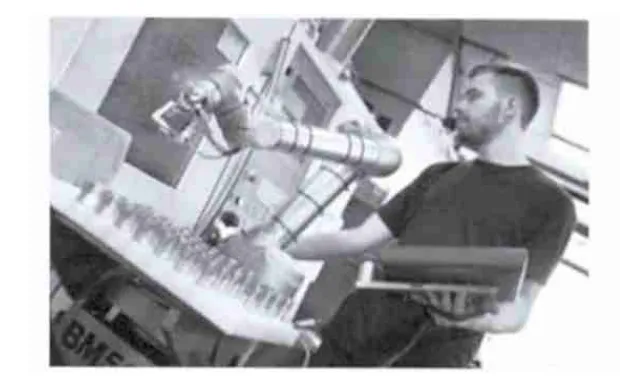
圖4 生產中協同工作設計的丹麥機器人
(3)前景
最終,同步伺服電機安靜的操作和高品質的控制確保了機器人也可用于處理應用之外的應用。到目前為止,Universal Robots的重點仍是將機器人作為執行簡單任務的工具。雖然已有丹麥歐登塞市的公司已開發了不含不可控的震蕩和振動的輕質結構,但是,也有新的應用可能性,如焊接和粘接。這一發展還源于其擁有復雜的安全技術,這樣這兩種型號甚至可以在沒有額外屏蔽的情況下使用。這為工作人員和技術之間開啟了安全舒適的合作方式。
以上1則由Mepax China提供
位置控制電動機/驅動器
Schneider美國公司研制的LEXIUMM驅動器(LMD)可以使用NEMA23,34兩款電動機,有脈沖/方向兩種形式,電動機和驅動器有四種控制方式:轉矩、轉速、同步脈沖方向和運動控制——可以直接用11120位的閃光存儲器直接對電動機、驅動器和控制器進行編程。該系列產品有一串行RS-422/485通信接口,工作電壓自12~70 V(DC)。在閉環方式時,它的內編碼器可利用一種所謂的hm技術——它兼有步進電動機和伺服電動機的優點,同時又克服了一些諸如同步丟失或失速等缺點。可變電流控制的特點具有降熱、節能和減少運行成本的優點。
軸伺服安裝旋轉脈沖發生器
美國Omega公司研制的ZSD系列軸伺服安裝選裝脈沖發生器具有高精密的精度。它的npn開式集電器帶有指數正交輸出,適用于小型高精密、低成本編碼器。它的金屬結構件可確保多年無故障運行。
太陽跟蹤電動機
Dunkermotoren美國公司研制的STM(太陽跟蹤電動機)包括可供選擇的機載傾斜儀和直接傾斜儀輸入的整體式無刷直流電動機。STM有整體式電源和控制電子儀器、現場總線通信,還帶有行星齒輪頭、蝸桿。電動機可配置不同的旋轉齒輪和線性傳動機構。電動機可與最多65535根跟蹤軸聯成網絡,端口可直接與主電廠的跟蹤控制器相連接,從而減少目前傳統跟蹤系統中的大量元器件。
不銹鋼伺服電動機
美國Kollmorgen公司研制的新型不銹鋼同步伺服電動機,防護等級為IP69K。它的一個衛生型機殼可以滿足EHDG、NSF、BISSC,帶有一根3 A的機械引導線。電動機的結構材料可確保長時期無故障運行,即便長期身處化學制品和高壓水沖洗環境中也無妨。無需另外的保護措施,也不必將它從機床上拆卸,不用加覆蓋物就可沖洗。
移動磁鐵線性傳動機構
美國BEI公司的移動磁鐵音響線圈傳動機構可與智能電器儀器相配合,以便檢測輸出速度和輸出力。移動磁鐵傳動機構可用于控制減速,能柔和地停在某一位置。一般而言,標準型音響線圈傳動機構不具備上述功能。標準音響線圈傳動機構有固定磁鐵,而移動件則為線圈,而移動磁鐵傳動機構則剛好與之相反,它利用固定線圈。
以上5則由杜宗瀠提供
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
