模塊化四輪全向驅動小車設計與運動控制方法
2013-11-08 03:31:06鄭圣子
天津科技大學學報 2013年5期
鄭圣子
(天津科技大學機械工程學院,天津 300222)
移動機器人是機器人領域的一個重要分支.在20 世紀60年代初期,學者已經開始了對移動機器人的研究[1–2].初期的研究主要集中于野外機器人的系統設計和信息處理,及其怎樣構建實驗系統以對新理論進行驗證.近年來,對移動機器人的研究開始進入與人類生活息息相關的領域[3].移動機器人的模塊化設計是當今移動機器人領域一個新的研究熱點,它能大大降低研究和開發的費用,降低移動機器人成本,提供標準的零部件設計[4–5].但大多數小型機器人的模塊化設計只是適用某類特定的機器人產品和硬件模塊化,沒有真正實現軟件與硬件產品同時在不同機器人產品上的通用化.
因為全向驅動控制的顯著優點,使其成為移動機器人領域的另一個研究熱點.這項技術可使機器人能越過更多障礙,更加靈活和智能化[6–7].全向驅動的缺點是后續的運動學模型相對復雜.對于小型廉價機器人,宜采用單片機控制.單片機控制系統價格低,但計算能力差,能否實現對全向驅動的實時控制是機器人模塊化設計的瓶頸.
本文設計了一種四輪全向驅動機器人,其采用通用接口和模塊化的設計方法.針對設計提出一種模塊化四輪全向驅動運動學模型,并對模型進行了分析和簡化.模型通過不斷地改變曲率半徑實現對小車的方向控制,克服了全向驅動建模的復雜性問題.
1 四輪全向驅動機器人的模塊化設計
機械結構設計是機器人運動和控制的基礎.機器人與計算機相區別的一個重要特征就是機器人能夠運動.要運動就必須有動力部件以及由這些動力部件驅動的結構.驅動子系統、傳感子系統和控制決策子系統是一個機器人最基本的3 部分.
如圖1所示,模塊化設計的四輪全向驅動機器人由4個電機驅動模塊、4個舵機驅動模塊、4個紅外障礙檢測傳感器模塊、AVR 單片機控制器以及電纜等輔助設備組成.
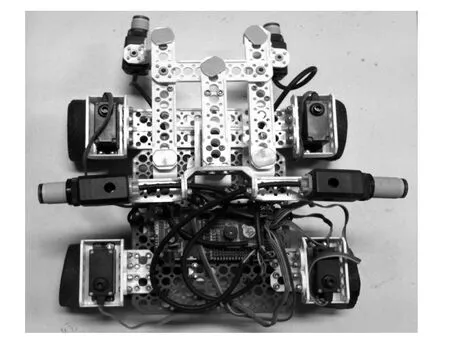
圖1 四輪全向驅動機器人實物圖Fig.1 Physical map of omni-directional 4-wheel-driving robot
2 建立運動學模型
2.1 運動學建模過程分析
運動學是對機械系統如何運行進行研究.必須了解機器人的機械行為以正確地設計特定任務的移動機器人,即必須建立相應的運動學模型,這是移動機器人運動學最根本的問題.
建立模型是一個由底向上的過程[8].各單個輪子對機器人的運動作貢獻,同時又對機器人的運動施加約束.根據小車底盤的幾何特性,4個輪子是連在一起的,所以它們的約束聯合起來,形成對機器人底盤的整個運動約束.在整個分析過程中,把機器人建模成輪子上的剛體,運行在水平面上.
為確定機器人的位置,建立全局坐標系和機器人局部坐標系之間的關系,見圖2.坐標軸XI和YI將平面上任意一個慣性基定義為從某原點O(XI,YI)開始的全局坐標系.選擇機器人的底盤中心點P 作為參考點.基于(XR,YR)定義了機器人底盤相對于P 的兩個軸,從而定義了機器人的局部坐標系.在全局坐標系中,P 的位置由坐標x 和y 確定,全局和局部坐標之間的角度由θ 給定.可以將機器人的姿態描述為具有3個元素的向量:
下標I 表明該姿態基于全局坐標系.為了根據分量的移動描述機器人的移動,就需要把在全局坐標系的運動映射成在機器人局部坐標系的運動.映射的是機器人當前位置的函數,該映射可用正交旋轉矩陣表示:
可以用該矩陣將全局坐標系(XI,YI)中的運動映射到局部坐標系(XR,YR)中.這個運算由標記:
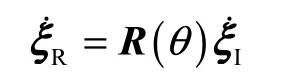
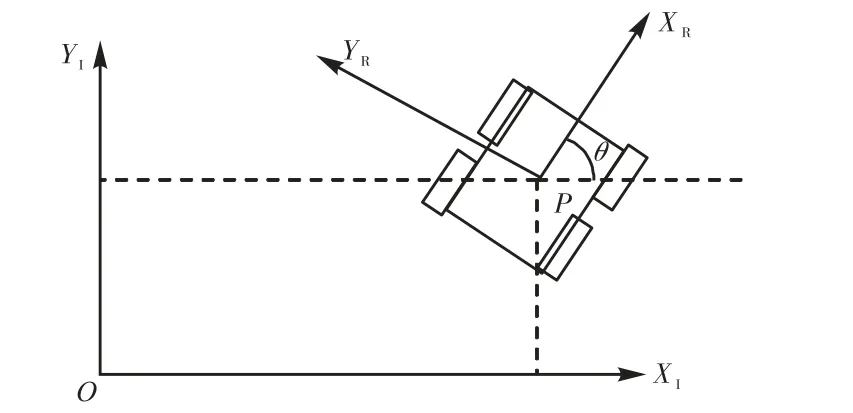
圖2 建模分析示意圖Fig.2 Schematic diagram of modeling analysis
2.2 輪子運動學約束
建立機器人運動學模型的第一步是表達加在單獨輪子上的約束.為了簡化問題便于分析,假定輪子平面總是保持垂直,且在所有的情況下,輪子與地面之間只有一個單獨的接觸點.
在這些條件下,每一個輪子有兩個約束:第一個約束堅持滾動接觸的概念,即當運動在適當方向發生時,輪子必須滾動;第二個約束堅持無橫向滑動的概念,即在正交于輪子的平面,輪子必須無滑動.
小車輪子類型屬于小腳輪,輪子的接觸點在位置B,它被固定長度d 的剛性桿AB 連接到點A,從而固定了垂直軸的位置,B 圍繞該軸進行轉動.車輪有兩個隨時間改變的參數,φ(t)表示車輪隨時間的轉動,β(t)表示AB 隨時間的轉動角度和方向,其分析示意圖見圖3.
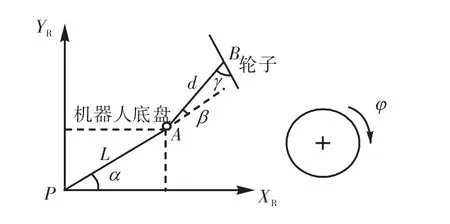
圖3 小車輪分析示意圖Fig.3 Schematic diagram of wheel analysis
對小腳輪而言,在與輪子平面一致的運動期間,軸偏移不起作用,其滾動約束方程為

然而,小腳輪的幾何特性對滑動約束有重大影響.關鍵問題是,在點A 發生對輪子的橫向力,因為這是輪子與底盤的接觸點.由于相對于點A 的地面偏移接觸點,橫向運動約束不為零,此約束是一個滾動約束.因此,必定產生垂直于軸的適當轉動:

式(1)、式(2)是一個輪子的運動方程,將4個輪子的方程聯立即為小車的運動模型.
2.3 運動學模型的簡化
2.3.1 模型的簡化理論
上述運動模型是四輪小車機器人的通用模型,對于小車要走的路徑、前進的方向,可以有多種選擇,模型有多種解,實現方法多樣.為便于計算和編程,實現不同的路徑軌跡,必須對模型進行簡化.
任何一條曲線都可看作是由無數曲率半徑已知的小圓弧組成的,這是對模型進行簡化的基礎.由于每個小車輪子都配有舵機,每個輪子都能靈活運動,故可以按曲率半徑來控制小車的運動軌跡.轉彎時小車4個車輪的法線相交于路徑曲線的曲率中心.
2.3.2 模型簡化的實現
以圖4中小車向右轉為例進行詳細分析,并計算小車舵機的轉角,其分析過程如圖5 所示.圖5 中,A點為小車底盤中心(局部坐標的原點),B 點為路徑曲線曲率中心,C 點為舵機轉軸,D 點為小車車輪中心,AB 為路徑曲線的曲率半徑,記為R,AC 為小車局部坐標原點與舵機轉軸中心的距離,BD 方向為車輪法線方向.其中AB=92,mm,CD=75,mm,車輪半徑r=30,mm,∠BAC=49°,輪子與CD 舵機連桿方向的夾角∠CDF=53°.
圖4 小車運行示意圖Fig.4 Schematic diagram of robot motion
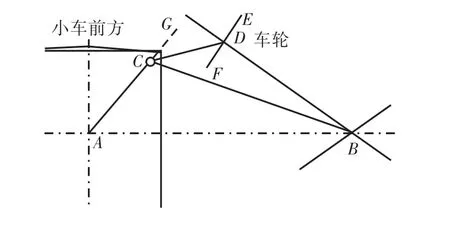
圖5 舵機轉角計算分析圖Fig.5 Computing analysis of motor rotation angle
在△ABC 中,∠BCA 為已知.由上述條件,利用余弦定理和正弦定理可求得BC 長度和∠ABC:
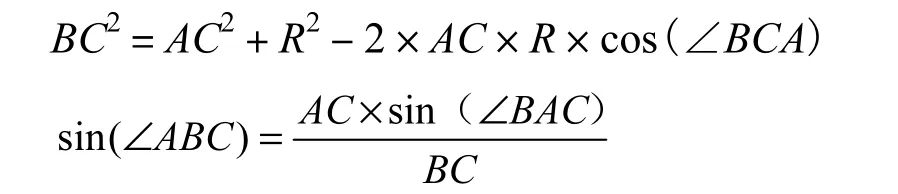
在△BCD 中,已經求得BC 的長度,BD 垂直于車輪EF,∠CDF 已知.由上述條件,利用余弦定理和正弦定理可求得BD 的長度和∠BCD:

舵機連桿初始位置的方向為AC,由幾何關系可以計算∠DCG,即為曲線此點位置處小車舵機的轉角:

對于遠離曲率中心的小車外側輪子,其計算方法與上述計算過程類似.
由于小車幾何結構和路徑實現方法的特點,雖然左右兩側舵機轉角大小不同,但小車同側的舵機具有相同的轉角,只是前后舵機轉角的符號相反,故利用上述分析結果即可得到同側舵機的轉角.
由數學知識,任意曲線的曲率半徑為

給定了機器人小車的路徑曲線,就可根據上式求得曲線任意點處的曲率半徑.根據求得的曲率半徑就可實現設定的機器人小車路徑.
2.3.3 模型簡化中要解決的問題
(1)轉彎問題:平面坐標系中的曲線有凹、凸兩種,曲率中心可能落在平面曲線的兩側(見圖6),每一種小車具有相反的轉向趨勢,這就提出了小車如何轉向的問題.
函數f(x)在區間I 上連續,如果對I 上任意兩點x1、x2,恒有,則函數為凹函數,如果恒有,則函數為凸函數.
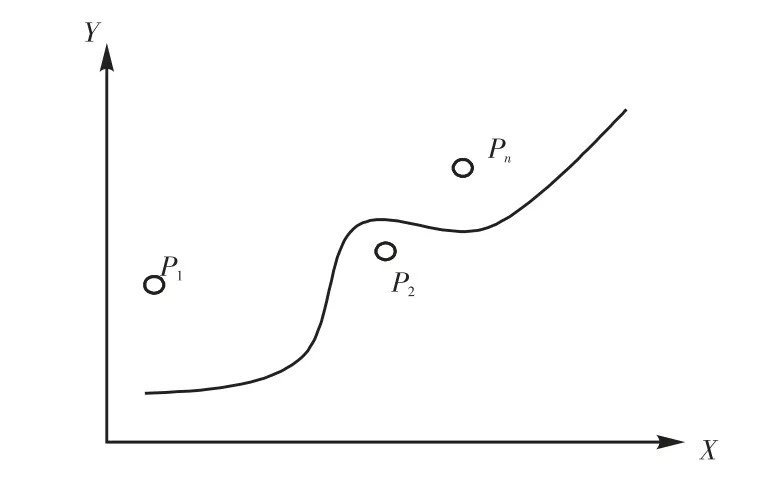
圖6 曲率分析示意圖Fig.6 Schematic diagram of curvature analysis
如果沒有這樣的限制,小車將只有一個方向的運動趨勢.默認函數為凸函數時小車有向左的運動趨勢,函數為凹函數時小車有向右的運動趨勢,這樣小車轉彎的問題就解決了.
(2)曲率半徑過小或過大:由于受到小車幾何結構和舵機架安裝的限制,舵機轉角并不能隨意設定,轉角范圍有所限制.
當曲線某處曲率半徑過小時,令舵機按允許的最大轉角運動,確保小車的安全,防止舵機被卡死,燒壞舵機.即小車有一最小曲率半徑,當程序計算的曲率半徑小于此最小曲率半徑時,小車按最小曲率半徑運動.
當曲線某處曲率半徑過大時,由2.3.2 內容計算得來的舵機轉角較小,甚至為零,可設定當曲率半徑大于某一值時,默認小車沿直線前進.
3 實 驗
機器人機體采用ABS 塑料連接件,其質量小于2,kg.微控制器采用Atmega128 單片機,驅動電機為17,W直流電機,型號為FAULHABER 2342L012,CR,連接 47∶1 的行星齒輪減速器,舵機采用的是SolidMotion CDS5401 型數字化舵機.假定室內清掃機器人在沒有障礙的情況下要求覆蓋所有地面以完成清潔工作,因此本實驗設定的軌跡是從一點出發不斷向外擴張的螺旋線,使得清潔機器人能覆蓋全部工作區域.理論軌跡和實際實驗軌跡如圖7 所示.
經過10 次實驗,模塊化機器人達到如下指標:最大前進速度12,cm/s;舵機最大轉角36°;紅外傳感器最大探測距離2,cm.通過測量,實際軌跡與理論軌跡相的最大偏差是2,cm,機器人每步運行的反應時間小于0.05,s.而常規軌跡控制方法采用三角函數和微分運算,采用單片機控制系統的每步運算時間大于0.1,s,行走軌跡是斷斷續續的,不能實現實時控制.與常規軌跡控制方法的對比表明,在現有微控制器的運算速度條件下,簡化的運動學模型可以實現實時控制.因此,在沒有光電編碼器的情況下,利用簡化的運動學模型進行實時控制相對比較理想,達到了設計要求.
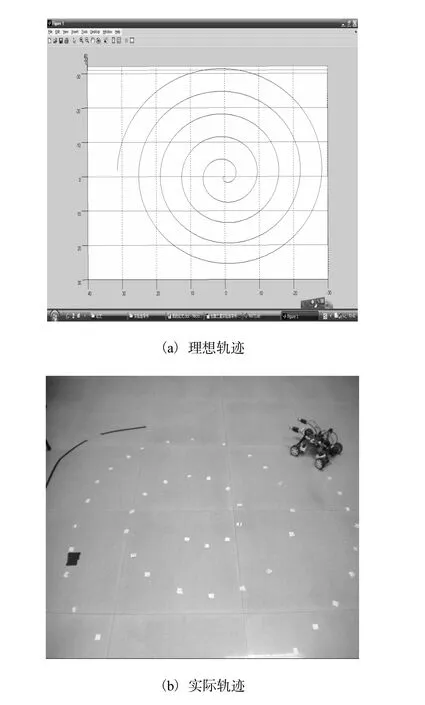
圖7 螺旋線軌跡Fig.7 Spiral trajectory
4 結語
本文基于設計的模塊化四輪驅動機器人,在對其運動模型進行分析的基礎上,提出通過改變曲率半徑實現對小車運行軌跡進行控制的方法.簡化的模型減少了計算規模,提高了控制效率,可使機器人能快速地反應,具有較好的實時性.由于采用模塊化設計,可以較方便地加入其他模塊,提高了開發效率.
模塊化機器人的運動學模型隨機器人的模塊組成不同,也會隨之變化,求解有一定難度.因此,如果能夠實現運動學模型的模塊化,與機構的模塊化相配合,將大大縮短模塊化機器人的開發周期,這也是本課題下一步的研究方向.
[1]西格沃特R,諾巴克什I R.自主機器人導論[M].李人厚,譯.西安:西安交通大學出版社,2006:49–57.
[2]肖雄軍,蔡自興.服務機器人的發展[J].自動化博覽,2004,21(6):1–5.
[3]徐德,鄒偉.室內移動式服務機器人的感知、定位與控制[M].北京:科學出版社,2008:21–22.
[4]周雪峰,江勵,朱海飛,等.一個模塊化機器人平臺的設計[J].華南理工大學學報:自然科學版,2011,39(4):50–55.
[5]Arkin R C.Behavior-Base Robotics[M].Cambridge,MA:MIT Press,1998:12–40.
[6]匡建輝,楊宜民.基于模糊與PD 控制的四輪全向移動機器人速度補償控制器研究[J].計算技術與自動化,2011,30(1):99–102.
[7]劉文國.四輪全向驅動吸塵機器人的避障實現[J].經濟技術協作信息,2009(33):113.
[8]張帥.基于ARM 的導航移動機器人控制系統研究[D].大連:大連理工大學,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
現代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
制造技術與機床(2017年3期)2017-06-23 08:11:21
流程工業(2017年4期)2017-06-21 06:29:50
光學精密工程(2016年6期)2016-11-07 09:07:19