GPS技術在公路工程測量中的分析及應用
2013-11-15 07:35:18曹康健
中國測試 2013年4期
曹康健
(中山大學遙感與地理信息工程系,廣東 廣州 510275)
0 引 言
隨著測量技術向數字化測量方向發展,測量數據采集與數據處理向數字化、自動化、實時化發展,同時在測量技術引入了新的網絡技術、GPS技術、GIS技術等,使得測量數據管理更科學化、標準化、規格化,測量數據傳播與應用更網絡化、多樣化、社會化。GPS應用在隧道貫通工作中,可提供穩定性、方便性等保障[1],特別是在特長隧道中的應用。
本文以鐵北山隧道作為研究樣例,對該隧道GPS平面控制網進行測量研究,在實施處理過程中通過對GPS定位、GPS數據采集后數據精度處理來分析該技術在隧道貫通平面控制測量方面的實際應用方法與過程,為后期利用GPS技術進行隧道貫通平面控制測量提供幫助。
1 GPS原理
1.1 GPS定位原理
在GPS技術中,用戶GPS客戶端是通過對接收衛星發送的星歷參數和時間信息進行計算,然后得出客戶端所在的三維位置、三維方向、運動速度和時間信息。而在基于GPS的導航系統中,其總體原理是通過計算已知具體位置衛星到用戶端間的記錄,然后通過多顆衛星實現客戶機具體定位。衛星的位置信息可以通過星載時鐘所記錄的時間在衛星星歷計算即可獲取,衛星與客戶間的距離可以通過光速乘時間得到。GPS衛星啟用后,以1和0二進制碼元組成的偽隨機碼進行發射導航電文,偽隨機碼一分為民用的C/A碼和軍用的P(Y)碼,C/A碼頻率1.023MHz,重復周期 1ms,碼間距 1μs,相當于 300m;P 碼頻率 10.23MHz,重復周期 266.4d,碼間距 0.1μs,相當于30m。C/A由于民用,其保密性和安全性相對比較差;P(Y)為軍用專屬,其保密性很高。在導航電文內容中,星歷數據在實際定位中起到關鍵的作用,客戶機通過計算出客戶與衛星間的距離,然后結合導航電文中的衛星星歷數據推算出衛星發射電文時所處位置和用戶在WGS-84大地坐標系中的位置速度等信息,即通過四維坐標 x、y、z,Δt來實現精確定位,Δt為衛星與接收機之間的時間差。
1.2 GPS測量指標計算
1.2.1 外業數據質量檢核
(1)采用點觀測模式時,不同點必須采用不同基線、同步環和異步環的數據檢驗,且同一時段觀測值的數據變化不能超過10%。
(2)A級GPS網觀測數據的檢核必須按照A級要求執行。同時GPS的B、C、D、E級GPS網基線長度較差必須滿足[2]:

式中:σ——基線測量中誤差,mm。
(3)對于 B、C、D、E 級 GPS網基線測量誤差 σ,其差值必須滿足外業測量時的標稱精度,其邊長按實際平均邊長計算。
(4)B、C、D、E 級 GPS網同步環閉合差必須符合相關要求,同時GPS網外業基線中的獨立閉合環或符合路線坐標閉合差Ws和各坐標分量閉合差(WX、WY、WZ)應該滿足[3]:

式中:n——閉合環邊數;
σ——基線測量中誤差,mm。
其計算按規定執行:

1.2.2 GPS網平差
(1)A、B級GPS網無約束平差
1)對外作業根據實際情況進行無約束平差,對于存在聯合無約束平差時,通過引入若干系統誤差參數和顯著性檢驗進行處理。
2)無約束平差應進行方差分量因子估值檢驗和每個改正數粗差的檢驗。
3)進行無約束平差計算時,需要輸入2000點的地心坐標、基線改正值、基線向量平差值等數據。
(2)A、B級GPS網整體平差
1)整體平差應在2000國家大地坐標系或國際地球參考框架(ITRF)中進行。各子網歷元不同時,應利用板塊運動模型和速度場進行統一歸算,并通過起算點的全方差-協方差陣和松弛因子定權來進行整體平差計算。
2)整體平差應進行驗后單位權方差因子的檢驗和轉換參數的顯著性檢驗。檢驗后,應消去不顯著的轉化參數,并重新平差。
(3)C、D、E級GPS網無約束平差
1)在滿足以上條件的情況下,再以三維基線向量及其相應方差-協方差陣作為觀測信息,進行無約束平差。
2)無約束平差中,(VΔX、VΔY、VΔZ)關系必須滿足[4]:

式中:σ——基線測量中誤差,mm。
(4)C、D、E級GPS網約束平差
1)利用無約束平差后進行三維約束平差或二維約束平差。通過已知坐標、距離、方位進行加權約束。同時平差結果必須包括各類型坐標、基線向量改正數及其相應的精度。
2)約束平差中,基線分量改正數必須與粗差剔除后的無約束評查結果為同一基線,其改正值關系必須滿足[5]:

式中:σ——基線向量中誤差,mm。
2 控制網
2.1 GPS控制網內業設計
2.1.1 GPS控制網設計
在進行GPS測量前,需要進行GPS控制網的設計,其設計必須滿足客戶要求以及GPS控制網測試規范要求。在進行GPS控制網設計時必須考慮如下4 個原則[6-7]:
(1)GSP控制網應用范圍。不僅要考慮近期的設計需求與規劃,同時要考慮控制網在未來施工需求以及控制網的可擴展性。
(2)控制網必須采用層級設計。一般情況下,控制網設計采用分布式即可,但對于大型城市管理必須采用層級結構來保證控制網的未來可擴展性。一般情況下,首級網GPS各點間距離大于5 km,中級在1~5km間,三級在1km以內。同時為了保障各級控制網的穩定性,必須采用獨立的GPS基線向量構成閉合圖形網,不允許有支線。
(3)對于GPS測量準確度,必須符合表1中的要求。
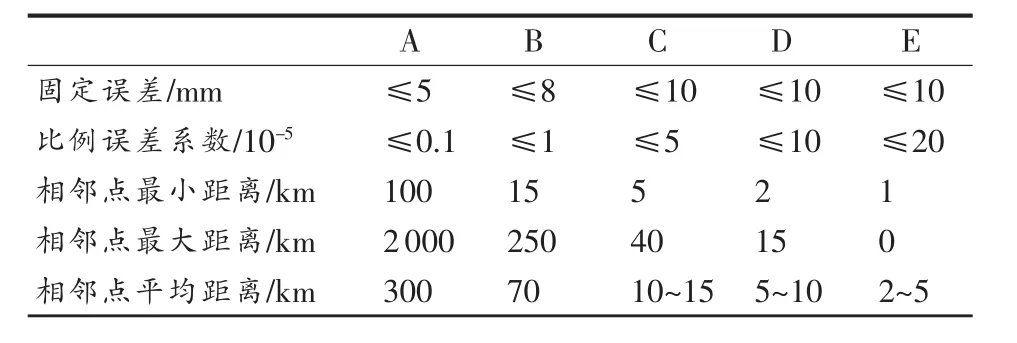
表1 GPS測量準確度
(4)對于坐標系和起算數據的選擇。在小區GPS網采用基準時用給定的起坐標進行確定,方位基準采用基于地面電磁波測距邊進行確定。
2.1.2 影響GPS測量技術因素分析
對于GPS測量技術設計影響因素一般有4個,首先是網點分布密度與布網方案,然后是GPS觀測衛星數與質量,接著是GPS信號接收的精密度和接收信號質量與穩定性,最后是接收機數量與運行穩定性。
2.1.3 GPS控制網的圖形設計
GPS控制網圖形設計必須要保證其靈活性與擴展性。因此小區的點要便于低等級常規測量的使用,點與點之間必須要保障一個控制點通視,對于點位間的距離,采用直接聯測進行小間中距相鄰位聯測;對于GPS網點各同步邊采用閉合環,同時采用平差進行等級檢驗;為了實現坐標系轉換,采用測區內國家、地方測設的三角點進行聯測,同時要保正其測試點里外均勻分布。
2.2 GPS控制網的外業設計
2.2.1 GPS隧道控制網選點要求
控制網測量是平面控制和高程控制測量的總稱,在進行工程規劃設計時,首先要進行地形測圖控制網來控制整個測區;施工時也需要建立施工控制網,以便控制工程的總體布置和各建筑物軸線之間的相對位置,滿足施工放樣的需要;在進行觀測時,也需要建立觀測控制網,以對建筑編寫觀測。在各個階段的控制網中其布網方式、測試精度都不同,一般是依次建立或者在原有網的基礎上改建,這樣是為了控制工程的位置和尺寸[8]。
2.2.2 GPS控制網網型設計
(1)對于隧道GPS網的設計,采用獨立基線構成閉合圖形,以及控制點間通過同步環或異步環相聯,在空間上構成三角形或者四角形來加強控制網強。在整個控制網中不能有游離基線以及基線數不能過多,否則會影響求閉合差的計算結果。
(2)在該控制網中,每個GPS點都必須要有3條獨立基線,其觀測時每個點至少要觀測兩個時段。采用3條獨立基線是為了保障該GPS點的可靠而設置。
(3)在進行GPS網觀測時,最好選擇具有5顆以上衛星的信號時段,因為觀測時段的選擇將直接影響到精度衰減因子(DOP)值,同時在進行實際觀察時,其GDOP(幾何精度衰減因子)不能出現陡然變化的情況。
2.2.3 控制網布設的一般過程
控制網布設準備工作主要是進行相關資料收集,了解觀測區域的地理位置、現狀大小以及觀察時需要多少精度、控制點擺放位置、控制點布設密度等信息,這些信息為確定布網方案、設計和施測做好準備工作。然后根據采集到的數據信息進行方案確定,其主要考慮:布設獨立網還是使用現有網,測量時采用三角測量還是三邊測量,是全面布設還是分區布設等,按照此方案能否實現判斷點與點之間的正常通信等。
3 GPS隧道控制測量實例
隧道控制測量的作用是為了減少當進行隧道多面相向開挖貫通誤差,隧道洞外控制測量的精度直接影響到隧道施工安全和工程質量。
3.1 工程概況
隧道是以沈撫高速公路隧道作為工程實例,其中有個工程包含兩個隧道:一號隧道和二號隧道,長度分別為1270m和640m,設計高度為7.8m。測區植被覆蓋高,森林茂密。
3.2 布網設計
在隧道的一端,設置一個高等級的GPS點,該GPS點作為其他未知點計算依據,設該點為G210。進出口各設了 3 個 GPS 控制點,GP1,GP2,GP3,GP4,GP5,GP210,其中GP1、GP5分別是進洞和出洞樁。圖1是公路二號隧道控制測量示意圖。
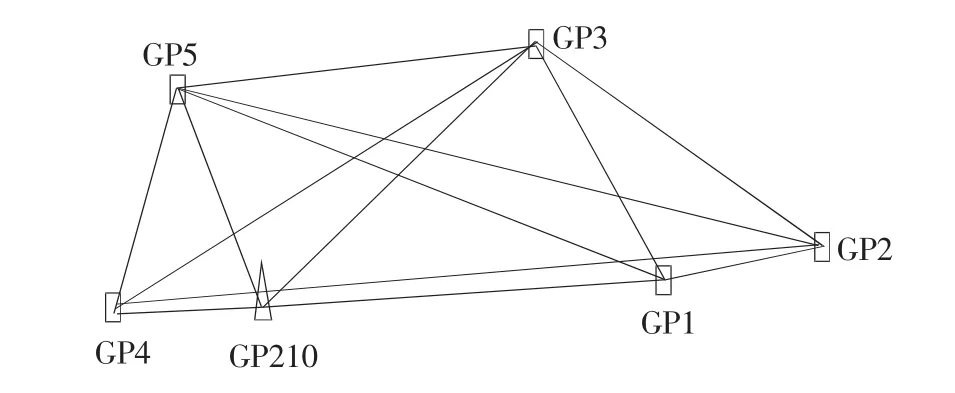
圖1 公路隧道GPS測量控制網示意圖
3.3 GPS的外業測量
在進行實際測試中,GPS接收機對于測量準確度很重要,其接收機必須滿足如表2要求。
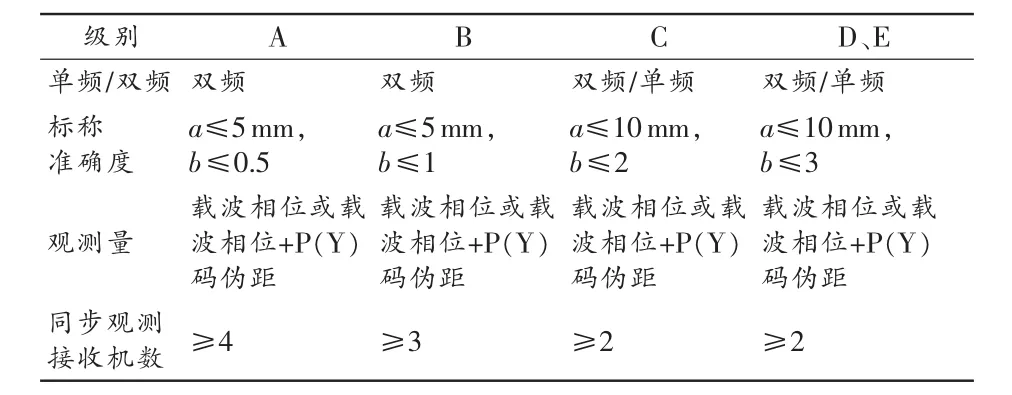
表2 接收機的選用要求1)
采用4臺Ashtech Z-Xtreme接收機進行GPS數據信息接收與測量,其測量工作程序如圖2所示。
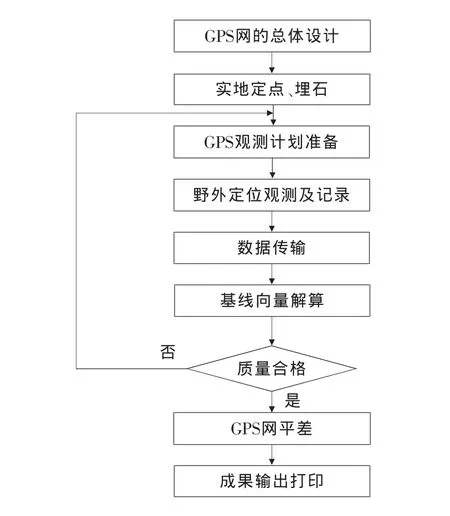
圖2 GPS測量工作程序
在進行GPS觀測時,應注意:根據衛星可見性預報,優選最佳觀測時段進行GPS觀測;采取1 mm天線對中精度,誤差要求≤±5°,在具體觀測時,從3個方向量取數,并要求誤差≤±2 mm,然后采用算術平均值進行取數;衛星高度截止角≥15°,PDOP值<4,接收衛星數>5;觀測時,不要在天線附近實用對講機或移動電話,以減少信號干擾。在使用正確的觀測方法的情況下,進行同步觀測的GPS測量數據見表3~表5。(其中分3次同步觀測,且每次觀測時間都在60min以上)。

表3 第一時間段觀測數據
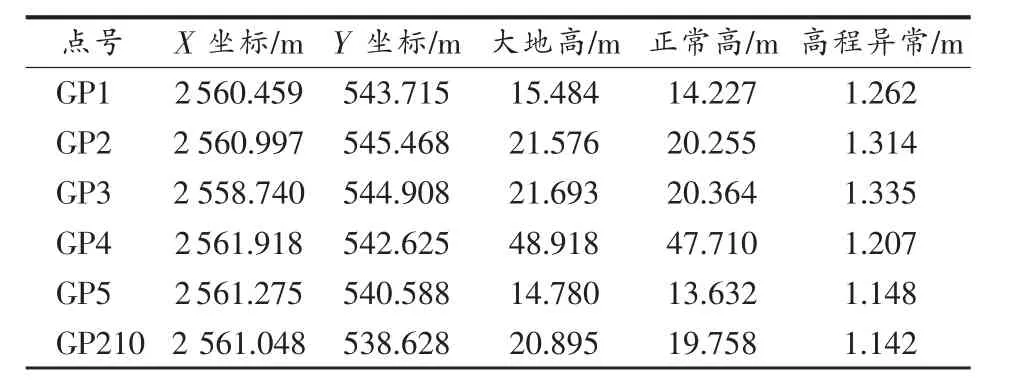
表4 第二時間段觀測數據

表5 第三時間段觀測數據
取3次觀測數據的平均數(表6)做數據處理和精度分析。

表6 觀測數據的平均數
觀測完畢后,需要將觀測數據傳入到電腦軟件中,由軟件進行測量數據的處理與分析,軟件采用Ashtech Solutions 2.60進行數據傳輸[9]。
3.4 GPS測量的數據處理和精度分析
在進行GSP測量數據分析與處理時,可以采用Ashtech Solutions 2.60軟件協助,該軟件可以通過基線解算及控制網的平差協助數據分析與精度處理。進行數據處理主要是基線數據處理,軟件處理基線數據的原理[10]是通過刪除記錄時間短于10min及出現周跳部分的衛星數據,進行基線解算。
(1)同步環閉合差
進行同步環閉合差,根據實際基線向量結果,可以獲取到9個同步環。相對誤差最大為2.486×10-6,最小為 0.479×10-6,小于允許值 5×10-6。
(2)異步環閉合差
異步環在衡量外業觀測成果和GPS網內部結構質量、GPS測量總體精度中起著關鍵的作用。全網共檢查異步環6個,相對誤差最大為2.873×10-6,最小為 1.438×10-6,小于允許值 5×10-6。
(3)GPS網自由網平差
基線解算符合精度要求后調入基線數據。在WGS84系統中進行無控制點條件下的三維無約束平差。經過平差后進行改正,其絕對值必須滿足[11]式(4)。
接著以測區已知GPS控制點G210的坐標作為起算坐標,進行二維約束平差計算,其值與無約束平差的絕對值必須滿足式(5)。
1)無約束平差。在公路隧道控制測網GPS數據解算時,無約束平差后各個基線分量中,誤差最大的基線為GP210-GP05,其改正數絕對值VΔz=0.015m、VΔy=0.022 m、VΔx=0.017 m,均小于 3σ=0.165 m,滿足GB/T 18314-2009《全球定位系統(GPS)測量規范》中E級要求。
2)約束平差。在公路隧道控制網GPS數據解算時,約束平差后,改正值與無約束平差絕對值誤差最大為GP02-GP06,其改正數絕對值VΔz=0.047 m、VΔy=0.028 m、VΔx=0.064 m,均小于 2σ=0.524 m,滿足滿足GB/T 18314-2009《全球定位系統(GPS)測量規范》中E級要求。
3.5 測量結果數據分析
通過對該GPS控制網的精度分析,得出以下結論:所得數據結果的精度滿足GB/T 18314-2009《全球定位系統(GPS)測量規范》中E級要求:同步環閉合差相對誤差最大為2.486×10-6,最小為0.479×10-6,小于允許值5×10-6;異步環閉合差相對誤差最大為2.873×10-6,最小為 1.438×10-6,小于允許值 5×10-6;無約束平差誤差最大的基線,其改正數絕對值VΔz=0.015 m、VΔy=0.022m、VΔx=0.017m,均小于 3σ=0.165m;約束平差后,基線分量的改正數與同一基線的無約束平差相應改正數較差的絕對值誤差最大的基線其改正數絕對值 VΔz=0.047 m、VΔy=0.028 m、VΔx=0.064 m,均小于 2σ=0.524m。
4 結束語
本文對公路隧道貫通的平面控制測量中采用的是GPS相對定位測量技術,在山區植物茂盛、道路崎嶇等環境下,此技術充分發揮了它的優勢,與常規測量相比,它不需要兩點間無需通視就能直接觀測,節省了人力、物力等,與常規測量相比有明顯的優勢。
[1]Murphy A M,Tsutsumi S,Gaussen P.A low-power,low-cost bipolar GPS receiver chip[J].IEEE Journal of Solid-state Circuits,1997,4(2):587-591.
[2]許進,周寧.GPS接收機的單片機通訊接口[J].電子器件,1999,22(3):23-26.
[3]張坤宜.交通土木工程測量[M].北京:人民交通出版社,2006,2(8):79-82.
[4]鐘孝順,聶讓主.測量學[M].北京:人民交通出版社,2006(5):109-111.
[5]周建東.高速鐵路施工測量[M].成都:西南交通大學出版社,2011,23(2):123-226.
[6]徐忠陽.GPS原理與應用[M].北京:解放軍出版社,2003,45(6):48-72.
[7]劉美生.全球定位系統及其應用綜述(三):GPS的應用[J].中國測試技術,2007,33(1):5-11.
[8]Leick A.GPS satellite surveying[M].John Wiley Sows,1990.
[9]林晶,茅鐘明.基于GPRS技術雙向監控在化工行業中的應用[J].計算機工程與設計,2007(12):36-37.
[10]劉明,常青,張其善.基于GPRS的油井監控系統[J].網絡技術,2003(10):18-20.
[11]龐志勇,劉冬華,黃沫.基于GPRS數據傳輸終端的實現[J].中山大學學報論叢,2006,26(2):129-133.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
