基于DSP 的平面電機控制系統設計
2013-11-22 07:51:32李曉飛劉新妹殷俊玲
微特電機 2013年9期
關鍵詞:方向
李曉飛,趙 敏,劉新妹,殷俊玲
(中北大學,山西太原030051)
0 引 言
隨著數字控制技術、電力電子技術及控制理論和方法的快速發展,使用單片機實現平面電機的運動控制系統,已經不能滿足高精度控制領域的進一步要求,急需采用一些新的方法和技術對原有的方法進行改進,DSP 集微控制器和高性能數字信號處理等特點于一身,具有強大的控制和信號處理能力,能夠實現復雜的控制算法,特別適合于平面電機控制系統的開發。DSP[1-2]控制技術具有靈活、精確、抗干擾能力強、速度快、性能穩定等優點,已廣泛應用于電機控制、激光打印機、掃描儀和復印機以及網絡控制器等諸多領域。使用DSP 實現數字控制系統已成為未來的發展趨勢。
1 控制系統組成
本平面電機控制系統主要由被控對象平面電機、控制器模塊[1]、位置反饋模塊、驅動模塊和電源管理模塊幾部分構成,同時配合人機交互界面實現平面電機運動模式的改變等。
1.1 平面電機
平面電機(以下簡稱LSPM)[3-5]由一個齒狀結構的定子和一個帶位置傳感器的動子組成。圖1 為LSPM 的實物圖。在LSPM 動子中有4 個電磁模塊,每個電磁模塊由兩相電流驅動,即A 相和B 相,通過產生磁阻力驅動動子到達一個新的平衡點。3 個高精度位置傳感器是用來報告動子的更新位置,其中1 個傳感器用于報告Y 方向更新位置,另2 個傳感器用于報告X1 和X2 方向的更新位置,X1 和X2方向的傳感器成中心對稱分布,故不僅可檢測X 方向誤差,還可以檢測偏航誤差。LSPM 不同于傳統的平面步進電動機,它采用獨特的氣浮結構,使其運動摩擦力接近于零,且在高速運動下LSPM 的推力遠大于步進電機,LSPM 最大推力為75 N,最大速度為0.9 m/s。且XY 工作臺精度±15 μm,位置傳感器分辨率1 μm。此外,它還有很多獨特的功能,如偏航控制、自動校準、自動歸位、停滯檢測、誤差補償等。

圖1 LSPM 實物圖
LSPM 是將電能直接轉換成二維平面平移運動的機械能,無需引入機械轉換或傳動機構,且運動平面保持在同一高度的執行裝置。平面電機控制系統[7-8]可以分別實現X 方向和Y 方向的位置控制,但由于各軸之間存在電磁耦合,故很難精確實現各軸的獨立運動控制。本文使用4 軸運動控制卡PCI-4P 卡作為控制器模塊,可以實現各軸的獨立控制,互不影響。平面電機具有結構簡單、控制精度高、速度高和穩定性強等特點,故常被應用于高精度控制領域中。
1.2 控制器模塊
綜合平面電機控制系統的硬件資源要求,在對控制器模塊[6]進行選擇時芯片的選型是一個非常重要的環節。在考慮到是否滿足硬件資源最小要求的前提下,DSP 芯片的型號決定了外圍電路及系統的其他電路的設計依據。DSP 的選型受芯片的運算速度、算法格式、系統精度、處理速度、功耗、穩定性等多種綜合因素的制約。
考慮LSPM 的特點,根據位置反饋模塊接口、驅動器的輸入和輸出接口及人機交互界面的要求后,在基于DSP 的平面電機控制系統設計中,我們選擇PCI-4P 運動控制卡作為控制系統的控制器模塊。PCI-4P 卡整合了Flash 存儲器、快速A/D 轉換器、PWM 模塊、PCI 模塊、多通道緩沖串口等外設。
PCI-4P 卡是4 軸運動控制卡,使用DDA(Digital Differential Anlyzer)方法給每一個軸發送遞增的脈波,完成4 軸的運動控制。它也能通過編碼器讀取反饋值,非常適合于脈波型伺服電動機和步進電動機的控制。PCI-4P 卡具有以下特點:4 軸伺服/步進電動機控制,每軸可獨立控制,互不影響;片內具有128 k 字節的Flash,可以將控制程序直接燒寫到Flash 中,實現控制系統的開機上電運行;可選擇三種脈沖輸出模式:STEP/DIR,CW/CCW 與A/B,差動脈波輸出降低干擾;非對稱直線加/減速驅動、S曲線加/減速驅動;3 軸線性插補,2 軸圓弧插補等,特別適合于平面電機控制系統的開發。圖2 為PCI-4P 卡實物圖。
圖2 PCI-4P 卡實物圖
1.3 位置反饋模塊
平面電機一般通過直線傳感器(光柵尺或磁柵尺)對某運動方向提供實時位置信息反饋,速度信息一般通過在一定時間內計算位置信息的斜率間接得到。因此,一塊DSP 芯片實現平面電機在兩個方向控制的前提是芯片能夠提供兩路相互獨立的位移實時檢測接口。
1.4 驅動模塊
針對本系統所選DSP 芯片及外圍設備,所選驅動模塊必須保證系統的正常動作。LMDX 伺服驅動器由一塊電源板、四塊PU2 電流放大器、一塊UC48板、一塊MB5 主板、一塊PAT 板、一塊IDP4 板和一塊DSP C32 板。電源板提供± 36 V 的電壓給PU2,提供+ 5 V 和± 12V 的電壓給MB5、PAT、UC48、IDP4 和DSP C32 板。電機通過PU2 提供的電流來動作。PU2-1 驅動X1 軸,PU2-2 驅動X2 軸,PU2-3 驅動Y1 軸和PU2-4 驅動Y2 軸。伺服板UC48 接收HS4 輸出的信號,發送指令到PU2。當DSP C32 通過RS-232 接收從PC 傳出的命令時,IDP4 可用于接收主機控制器或PLC (programmable logic circuit)的命令。圖3 為LMDX 實物圖。

圖3 LMDX 實物圖
1.5 人機交互界面
通過人機交互界面進行計算機與電機之間的雙向信息交換。當程序燒寫到芯片內存后,程序按一定的順序被執行。一般來說,當程序運行后,平面電機的運行方式(如位置指令)無法在線調整,因此要借助人機交互方式,對電機運行狀態或控制參數進行實時調整與改變。圖4 為PCI-4P 卡安裝完成后的人機交互界面Motion Maker,在此界面可以進行機械參數設置、初始化設定、電機運動(包括直線運動、點動、返回等)參數設置等。
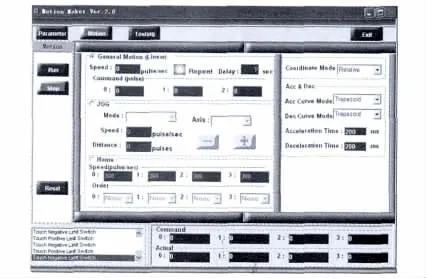
圖4 Motion Maker 人機交互界面
2 硬件系統設計
控制器要實現平面電機三自由度同步控制,需采集電流信號、位置信號、AD 校正參考電壓、輸出PWM 信號,還需實現AD 采樣校正、數字濾波、位置伺服控制、電流控制等算法。要完成上述復雜工作,本文采用高集成度的運動控制卡PCI-4P 來實現。PCI-4P 集成了PCI 模塊、CAN 總線模塊、AD 轉換器模塊和PWM 模塊等,DSP 控制系統硬件電路結構如圖5 所示。

圖5 DSP 控制系統硬件電路結構
本文采用“PC + DSP”的控制模式,PC 機利用其豐富的軟件功能,主要負責信息流和數據流的管理,以及從運動控制卡讀取未知數據,并經過計算后將控制指令發給運動控制卡。DSP 負責判斷動子位置信息,實時計算移動速度,并將其信息反饋給上位機,實現數字PI 調節并產生頻率固定、占空比變化的PWM 信號作為功率開關的驅動信號。驅動器[9]控制模式采用編碼器速度控制,驅動器接收運動控制卡發送的信號,通過內部的PWM 模塊實現平面電機運動控制,并通過反饋信號調整電機的運動,如此構成一個半閉環的LSPM 控制系統[10]。
3 軟件設計
控制系統的軟件主要由DSP 實現,DSP 實現的功能包括:主軸控制、進給軸控制、I/O 控制、編碼器反饋、原點歸位、測試功能、復位功能與上位機通信功能、狀態采集、狀態管理、還要把從上位機讀取的指令轉換為執行邏輯,其軟件功能結構如圖6 所示。
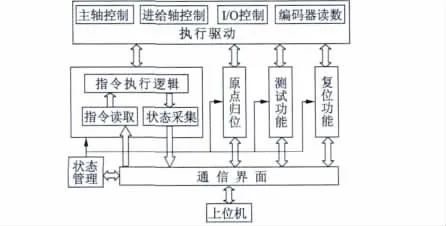
圖6 軟件功能結構圖
在Windows XP 環境下,可直接使用PCI-4P 卡提供的“MCCL(Motion Control Function Library)”運動函數庫資源,方便地在VB /VC + + 及其它軟件環境中進行編程,實現復雜的控制功能。基于平面電機控制系統軟件設計主要分為以下幾個部分:初始化程序、當前位置獲取及參考點置零程序、參考位置指令程序、PID 算法控制程序、電機起動程序、主程序。程序的執行流程如圖7 所示。
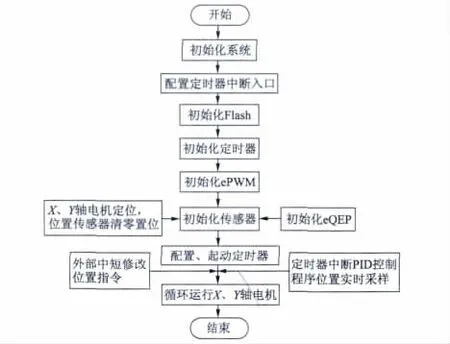
圖7 程序執行流程
4 實驗測試
4.1 定位精度
讓平面電機的Y 軸以點對點的方式運動,對其控制精度進行測試。運行結果如表1 所示。
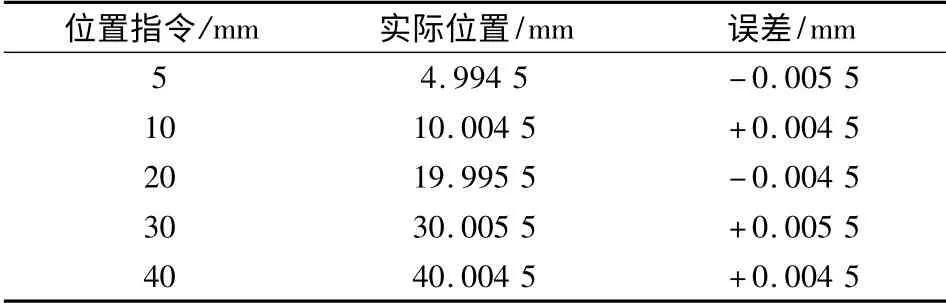
表1 Y 軸定位情況
從表1 可以看出,位置指令從5~40 mm 都可以保證靜態定位精度不超過0.005 5 mm。
4.2 動態運行
分別給平面電機X、Y 方向發送同頻、同幅的正、余弦脈波信號作為位置控制指令,其動態誤差響應曲線如圖8(a)和圖8(b)所示。由于在各自方向上的動作受外界環境,機械摩擦的影響,使得電機在兩個方向的動態誤差不完全一致。圖8(c)為X、Y方向分別加同幅、同頻的正弦和余弦復合指令信號時產生的圓周軌跡,由于氣源的不穩定性,使得電機在個別運行區域跟蹤誤差比較大。綜合實驗結果說明,基于DSP 的控制器能夠精確、有效地實現平面電機的三自由度運動控制。
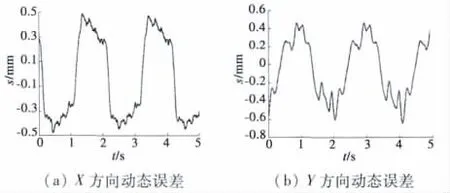
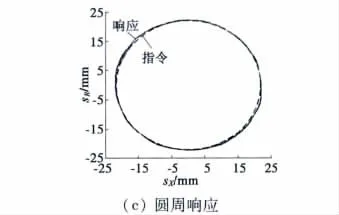
圖8 動態響應圖
5 結 語
平面電機控制系統經過實際性能測試,均能達到預定的各項系統指標,系統運行穩定。本文的創新之處主要體現在將DSP 技術應用于平面電機,并采用一塊DSP 芯片實現了平面電機的二維控制,簡化了系統結構和外圍電路,降低了系統的開發成本。
[1] 王劃一,楊西俠.自動控制原理[M].北京:國防工業出版社,2001.
[2] 王宏華.開關型磁阻電動機調速控制技術[M].北京:機械工業出版社,1995.
[3] 張琦.平面電機的控制及其應用前景[J].電子工業專用設備,2000,29(1):48-49.
[4] 潘劍飛,曹廣忠,王鑫.基于DSP 的平面開關磁阻電機位置控制系統研究[J].微電機,2009,42(6):38-42.
[5] 曹家勇,朱煜,汪勁松.永磁同步平面電動機三自由度運動控制器[J].中國電機工程學報,2006,26(17):143-147.
[6] 張前,黃學良,周贛.基于雙DSP 的平面電動機控制器設計[J].微特電機,2010,8(6):1-4.
[7] Pan J F,Cheung N C,Yang J M.High-precision position control of a novel planar swithed reluctance motor[J].IEEE Transactions on Industrial Electronics,2005,52(6):1644-1652.
[8] Zhao S W,Cheung N C,Pan J F.A self-tuning regulator for the high-precision Position control of a linear swithed reluctance motor[J].IEEE Transactions on Industrial Electronics,2007,54 (5):790-799.
[9] Fujii N,Kihara T.Surface induction motor for two dimensional drive[J].Transactions of IEE of Japan D.1998,118(2):221-228.
[10] Pelta E R .Two-axis sawyer motor for motion systems[J].IEEE Control System Mag,1987,7(5):20-24.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
