全系列三維激光掃描技術在文物及考古測繪中的應用
2013-11-27 09:33:58白成軍
天津大學學報(社會科學版) 2013年5期
白成軍,吳 蔥,張 龍
(1.天津大學建筑工程學院,天津300072;2.天津大學建筑學院,天津300072)
三維激光掃描技術又稱為“實景復制技術”[1],是20世紀90年代中期出現的一種以三維激光掃描儀和掃描信息處理技術為核心的數據采集與處理技術,其革命性的數據采集方式開創了面式數據采集[2]的新紀元,因其滿足了文物考古測繪領域非接觸、高速度、高密度、全數字化的數據采集要求,在短短幾年時間內迅速在考古發掘、古建筑測繪等文物保護領域得到了廣泛應用[3]。
當前,“全方位獲取古代信息”的精細測繪與精細發掘已經成為了文物保護及田野考古的主要發展方向[4]。由微觀手持掃描儀、中觀地面測量型掃描儀和宏觀車載、機載掃描儀,共同構成了文物考古測精細繪領域應用的全系列覆蓋,為文物及考古精細測繪提供了可能,最大限度地提高了文物考古測繪的數據采集效率和質量。但同時由于這些設備基本上進口于歐美、日本等國家,制造商和經銷商出于商業利益和技術壟斷的考慮,普遍對核心技術采取保密措施[5],給大多數不具備理工科背景的文物考古測繪人員正確使用設備和客觀評價掃描成果質量設置了重重障礙。
如何實現傳統測量方法與先進測量技術的優勢互補、如何根據掃描對象的特點選擇不同的三維掃描儀、如何根據文物建筑測繪或考古挖掘需求提供多樣化精細成果,是實現三維激光掃描技術這一革命性數據采集方式在文物考古測繪領域深度應用的關鍵。
一、全系列三維掃描基本原理及應用特點
在文物測繪中,根據測繪對象尺度范圍的大小,可將三維掃描系統分為微觀掃描系統、中觀掃描系統及宏觀掃描系統。
對于出土文物及建筑細部雕飾等小尺度與近距離對象的掃描,可選用微觀掃描系統進行掃描測繪。微觀掃描系統的核心設備為手持激光掃描儀,基本工作原理是:線激光器發出的激光掃描線到達被測物體表面后形成漫反射圖像,圖像經面陣CCD采集,在計算機中對激光掃描線漫反射圖像進行處理,依據掃描對象的特征點與CCD面陣像素的對應關系計算物體的景深信息,依此得到物體表面的三維坐標數據集合[6],即“點云”。手持式掃描系統為“涂刷式”掃描,借助事先布設好的控制點或掃描目標特征點將不同部位掃描點云拼合在一起。掃描范圍通常不大于2米,掃描相對精度一般可達到亞毫米級。
對于考古現場局部(如探坑)或文物建筑單體的掃描,因其掃描區域通常在300米以內,可采用稱之為地面測量型三維激光掃描儀的中觀掃描系統。按照測距方式分為脈沖式掃描儀和相位式掃描儀。采用脈沖式測距掃描,掃描范圍可達300米,但掃描數據精度較低。相對而言,相位式掃描儀掃描距離較小(通常不大于100 m),但數據采集精度較高,自由站掃描點云相對精度甚至可達到毫米級[7]。傳統全站儀測量需要人工干預幫助全站儀找到目標,每次只能測量一個目標點。測量型三維激光掃描儀在任一掃描瞬間相當于一個高速測量的全站儀系統,三維掃描變成基于一維測距和測角的單點定位。在處理器自動控制下,激光掃描儀對被測目標按照事先設置的水平及豎向采樣間隔進行連續單點掃描測量,完成掃描區域的整個掃描過程。地面三維激光掃描儀利用被測物體本身所具有的漫反射性能,根據激光測距原理獲得儀器到被測點的距離,同時根據電子測角原理測量激光束瞬時位置相對于起始位置(儀器的初始狀態)的橫向和縱向偏轉角,由此計算目標點在掃描測站坐標系中的三維坐標值[8]。將不同掃描站的掃描點云拼接在一起形成掃描對象的完整點云數據。
相對于前兩者而言,以車載及機載三維激光掃描儀為核心的掃描系統屬于宏觀掃描系統。其共同特點是掃描范圍空間廣度大、掃描分辨率和掃描精度相對較低,可用于大型考古現場、文物遺址及文物建筑組群的宏觀掃描測繪。通常車載及機載三維激光掃描儀系統掃描最遠距離可達到數公里,可實現最高2厘米的精確掃描測量[9]。車載及機載掃描系統的核心部分由激光掃描器、定位裝置及姿態測量裝置組成,其中激光掃描器負責掃描測距,衛星定位系統作為定位裝置測量掃描儀瞬間的空間位置,姿態測量裝置實時確定掃描儀的瞬間姿態[5]3。利用上述裝置得到的測站掃描數據、測站定位數據及掃描姿態數據,結合大地測量控制點資料,實現掃描對象的實景復制。
二、基于三維激光掃描技術的文物考古測繪成果多樣化表現
全系列三維激光掃描技術為文物及考古測繪成果的多樣化、精細表現提供了可能。
代表掃描對象的一個個“測點”形成的“點集合”構成了三維激光掃描最原始的成果,稱為“點云”。點云雖然經過了掃描算法的處理,但相對于傳統單點式測量方法所具有的高密度和全息化的特點,可作為原始資料進行存檔。同時,點云作為掃描對象的全數字化實景模型,可實現室內的真實量測。在考古挖掘的不同階段,對挖掘現場進行掃描,可實現考古挖掘行為的動態化管理和考古過程數字化再現。在建筑遺產保護領域,借助于高精度的地面控制網,可實現文物建筑遺產的連續性掃描監測。
二維數字線劃圖是文物保護工程領域所習用的工程語言,三維激光掃描系統為繪制不同部位、不同方向的二維數字線劃圖提供了強大的繪制功能,使處于前端的文物測繪調查工作和后續的保護規劃制定、修繕工程設計、施工等實現了無縫對接。二維線劃圖的繪制根據測繪對象的特點可以采用下述幾種技術路線實現:對于局部構件的繪制,直接在點云上量取繪圖所需要的長、寬、高數據,然后借助繪圖工具繪制二維圖;對于剖面圖等截割投影圖,根據繪圖部位和繪制精度形成繪圖區域的點云“切片”,將點云切片導入AUTOCAD等圖形繪制軟件形成二維線劃圖;對于空間關系不明顯、不易識別的測繪對象,借助高分辨率照片形成被測對象的正攝影像,然后繪制二維線劃圖。圖1為基于點云生成的義縣奉國寺大殿正射影像和二維線劃圖。

圖1 利用點云生成正射影像和二維線劃圖
二維線劃圖是對被測對象高度抽象化的結果,抽象的過程不可避免地造成了大量信息損失。實際上,在許多情況下二維線劃圖無法完整表達邊界模糊對象的真實情況,如出土器物、建筑紋樣、彩畫、淺浮雕等。作為二維線劃圖的重要補充表現方式,基于三維激光掃描點云形成的正攝影像圖消除了一般相片所固有的投影誤差及高程誤差,同時又兼具普通相片高分辨率、易于辨識的優勢,較好地解決了“邊界模糊類對象”難以精細化表達的難題。利用這一特點,可實現“邊界模糊類對象”的數字化監測。譬如,通過比對不同時間段內壁畫的高清晰正攝影像圖,可精細地描述壁畫顏色、形態等的變化。
基于點云的三維成果包括數字高程模型和三維模型。對雕像等這類由連續曲面構成的測繪對象,以等值線的形式表現的數字高程模型是其最基本的表現方式。相對于以往全站儀單點測繪,三維激光掃描技術高密度點云實現了等值線精細測繪和三維建模。圖2為義縣奉國寺明間佛像等值線圖和三維模型。此外,由于三維激光掃描結合傳統控制測量可以較容易得到點云統一的地理坐標屬性,據此建立的三維模型可很方便實現被測對象的三維漫游。

圖2 利用點云精細表現塑像細部
點云作為三維激光掃描的原始成果,具備地理信息系統(GIS)的基本特點,在此基礎上加入對象的其他自然、社會屬性,可形成四維管理信息系統,如建筑信息模型(BIM)[10]等。在此基礎上加入時間屬性,可構建文物遺產的動態化監測系統或考古挖掘的動態化展示系統。圖3為德和園大戲樓掃描點云及基于點云建立的建筑信息模型。
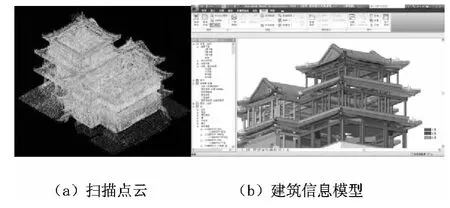
圖3 基于掃描點云建立建筑信息模型
在田野考古中,通常需要繪制考古現場平面圖、地層斷面圖、探方詳圖等以記錄勘探所獲堆積結構、層次、遺跡形狀、分布范圍等情況[11]。全系列三維激光掃描技術為詳細記錄上述考古挖掘過程和考古成果提供了可能,上文所述在文物建筑測繪中的所有應用都可方便地應用到考古工程中來。圖4為天津北運河明代沉船考古發掘現場及考古出土器物三維掃描成果。

圖4 考古成果精細化表現
三、傳統測量方式與三維激光掃描測繪的融合應用
長期以來,受測量技術水平限制,文物建筑與考古測繪中通常以二維線劃圖作為基本成果表達形式。相應的測量方式為手工量測或全站儀、平板儀等儀器量測。這些傳統測量方法的最大特點是單點量測,主要是通過測量特征點之間的距離繪制被測對象的二維線劃圖,在測量過程中用兩點代替直線、用折線代替曲線,測繪對象的大量細部信息被人為舍掉,測繪成果中記錄信息量相當有限。另外,傳統手工測繪方法中根據習慣臆想了許多諸如平行、垂直等實際不存在的條件,造成了測量誤差的積累和逐級放大,嚴重破壞了測繪成果本身所應具備的客觀特性。實際上,中國古代建筑中大量的曲線形構件和考古挖掘現場中大量的考古遺存(如石窟寺、雕像、考古遺跡、出土器物等),很難利用傳統測繪方法、按照有限的特征點進行詳盡的描述和表現。
三維激光掃描技術具有傳統測量方法不具備的諸多優勢,如變“單點采集”為批量面式采集、實現了“外業測量內業化”、“非接觸”工作方式不需要測量輔助設施、“所見即所得”的特點實現了考古過程記錄的定量化和動態“回放”。無論是微觀的手持式掃描儀、中觀的地面掃描儀,還是宏觀的機載掃描儀,為了得到掃描目標的完整點云數據,都需要從不同掃描站對同一目標的不同部分進行掃描,然后將各個掃描站的掃描點云數據拼接在一起。數據拼接是三維掃描的最核心環節[12],但單憑三維掃描技術本身很難實現點云高精度拼接。在點云拼接過程中,通常采用測量球標靶、平面標靶或掃描對象自然特征點進行拼接。按照測量誤差的傳播規律,使用上述拼接方式,隨著拼接站數的疊加,拼接末端的點云精度急劇降低,多一次拼接,末端測站的點云誤差就會放大一個層級。
將傳統測量方法與三維激光掃描技術結合,是解決上述問題的基本途徑。為保證最末端掃描站掃描數據的質量,同時使整個點云模型的精度均勻,除需要控制自由拼接的測站數外,還需要在掃描測繪過程中引入控制測量的思想,按照“先控制,后碎部;從整體,到局部”的基本誤差限定在容許范圍內。掃描測繪前,首先利用精密水準儀、電子全站儀、衛星定位儀等傳統測量儀器布設三維掃描控制網,測算各個控制點的大地坐標;在外業掃描過程中同步測量拼接點的大地坐標,將單一測站的掃描數據直接納入大地測量坐標系中(見圖5),提高拼接精度的同時,保證測繪對象不同部位的精度均勻。對于三維激光掃描無法測量的隱蔽部位可充分利用傳統手工測量的靈活性特點以彌補。
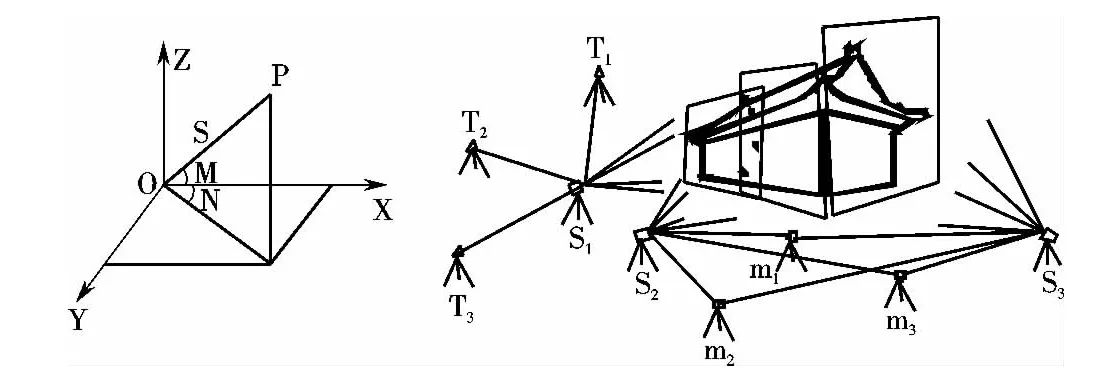
圖5 利用傳統測量方式實現多測站點云拼接
四、結 語
三維激光掃描儀以每秒鐘十萬點量級的數據采集速度、毫米級的數據采樣分辨率對被測對象進行掃描測量,其高精度、高速度和非接觸特點,為文物及考古測繪數據采集方式和成果表現形式帶來了新的變革,實現了文物及考古測繪由二維向三維、四維乃至多維的革命性飛躍。根據掃描對象特點選擇適宜的三維激光掃描系統是全系列三維激光掃描技術深度應用的基礎,將傳統測量方法和先進測量技術融合貫通、優勢互補以取得高精度測繪數據是全系列三維激光掃描技術深度應用的基本途徑,根據文物及考古挖掘的需求提供多樣化的測繪成果是全系列三維激光掃描技術深度應用的最終目標。
(文中未注明出處圖片系作者自繪)
[1]周 立,李 明,毛晨佳,等.三維激光掃描技術在古建筑修繕測繪中的應用[J].上海建設科技,2011(4):47-48.
[2]王其亨,吳 蔥,白成軍.古建筑測繪[M].北京:中國建筑工業出版社,2006:48.
[3]Bai Cheng-jun ,Wang Qi-heng.Misapplications of 3D Laser Scanning in Metric Survey of Historic Buildings[C]∥ The Organizing Committee of the International Conference.The International Conference on Remote SensingEnvironment and Transportation Engineering.New York:The Institute of E-lectrical and Electronics Engineers,2011:1354.
[4]馮恩學.田野考古學[M].長春:吉林大學出版社,2008:25.
[5]楊俊志,尹建忠,吳星亮.地面激光掃描儀的原理及其檢定[M].北京:測繪出版社,2012:3.
[6]張廣軍.視覺測量[M].北京:科學出版社,2012:182.
[7]白成軍.三維激光掃描在古建筑測繪中的應用[D].天津:天津大學建筑學院,2007:78-79.
[8]余 明,丁 辰.激光三維掃描技術用于古建筑測繪的研究[J].測繪科學,2004(10):69-70.
[9]李清泉,楊必勝,史文中,等.三維空間數據的實時獲取、建模與可視化[M].武漢:武漢大學出版社,2003:82.
[10]丁 寧 ,王 倩 ,陳明九.基于三維激光掃描技術的古建保護分析與展望[J].山東建筑大學學報,2010(3):274-275.
[11]國家文物局.田野考古工作規程[M].北京:文物出版社,2009:3-4.
[12]白成軍,吳 蔥.三維激光掃描技術的核心問題研究[J].測繪通報,2012(1):36-38.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21