外姿態測量系統中CCD驅動時序的設計及實現
2013-12-01 10:08:56丁振良
自動化儀表 2013年1期
李 晶 袁 峰 丁振良
(哈爾濱工業大學電氣工程與自動化學院,黑龍江 哈爾濱 150001)
0 引言
目前,空間物體的三維姿態測量在航空航天、船舶、軍事等領域有著重要應用。空間物體姿態測量方法有GPS導航法、激光干涉跟蹤法、激光雷達法以及計算機視覺測量法等[1-2]。近年來,計算機視覺對于目標的運動姿態參數測量已逐漸成為研究的熱點[3]。其中,基于線陣電荷耦合元件(charge coupled device,CCD)的姿態測量方法具有速度快、精度高等特點。
CCD電荷耦合器件具有輸出噪聲低、動態范圍大和電荷轉移效率高等優點。按陣列排列的不同,CCD分為線陣CCD和面陣CCD[4-6]。
線陣CCD已在各種非接觸測量中得到越來越廣泛的應用:大型射電天文望遠鏡FAST項目采用線陣CCD檢測空間三維標志點的實時運動位置[7];清華大學生物醫學工程系利用線陣CCD三維測量,在計算機輔助手術中進行立體定位[8]等。本文就是在多線陣CCD組合測量空間物體外姿態的背景下,進行線陣CCD驅動研究。
為克服以往普通數字電路芯片在實現線陣CCD驅動時存在電路體積大、設計復雜、靈活性和穩定性差等缺點[9],本文提出了一種基于復雜可編程邏輯器件(complex programmable logic device,CPLD)并使用Verilog HDL語言的線陣CCD驅動脈沖的設計方法。仿真和硬件試驗結果表明,該方法的可移植性好、通用性高,能夠滿足系統的要求。
1 線陣CCD的驅動電路原理
1.1 驅動電路的工作原理
驅動電路的工作原理圖如圖1所示。
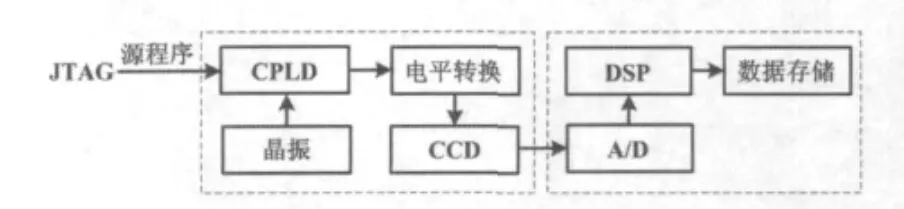
圖1 TCD1708D驅動電路工作原理圖Fig.1 Working principle of TCD1708D driving circuit
由外部晶振提供一個基頻信號作為CPLD的全局輸入時鐘信號,采用Verilog HDL作為CPLD的開發語言,將編寫好的程序通過JTAG口下載到CPLD。由于采用CPLD的I/O接口電壓為3.3 V,而線陣CCD的工作電壓為5 V,因此需要對CPLD的輸出進行電平轉換。同時,CPLD輸出的波形與CCD所需的驅動脈沖波形反相,需先通過反相器產生所需的驅動脈沖,再將驅動脈沖信號送到線陣CCD的相應端口。線陣CCD正常工作以后,系統對線陣CCD輸出的模擬圖像信號進行放大濾波處理,再經A/D轉換成數字信號;通過DSP對線陣CCD的數字信號進行處理和存儲,從而完成CCD的數據采集處理任務。
1.2 TCD1708D 主要特性
線陣CCD由一系列光敏像元(即MOS電容)組成。當光敏元在受到外界光照時,CCD將產生光電荷,這些光電荷被存儲在由電極形成的勢阱中。
經過一定時間的積累,在驅動脈沖的作用下,CCD中存儲的光敏元電荷包將按順序向輸出端移動,此時的光信號經過輸出放大,得到與存儲電荷成正比的電壓信號[10]。
系統采用的線陣CCD芯片是Toshiba公司生產的TCD1708D。TCD1708D是一款高靈敏度、低電流的兩相CCD圖像傳感器,其有效像敏單元共7450個。光敏單元尺寸為4.7 μm ×4.7 μm,光敏單元中心之間的距離為4.7 μm,掃描一張 A3尺寸的紙可以提供24線/mm的精度。
TCD1708D內部結構如圖2所示。信號分為奇數列和偶數列同時輸出,即OS1和OS2[11]。
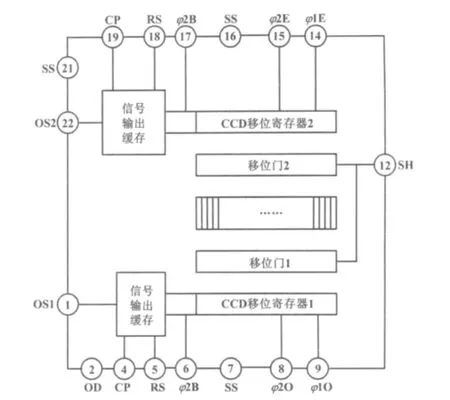
圖2 TCD1708D內部結構圖Fig.2 Internal structure of TCD1708D
2 TCD1708D的驅動時序設計
TCD1708D的驅動時序關系圖如圖3所示。
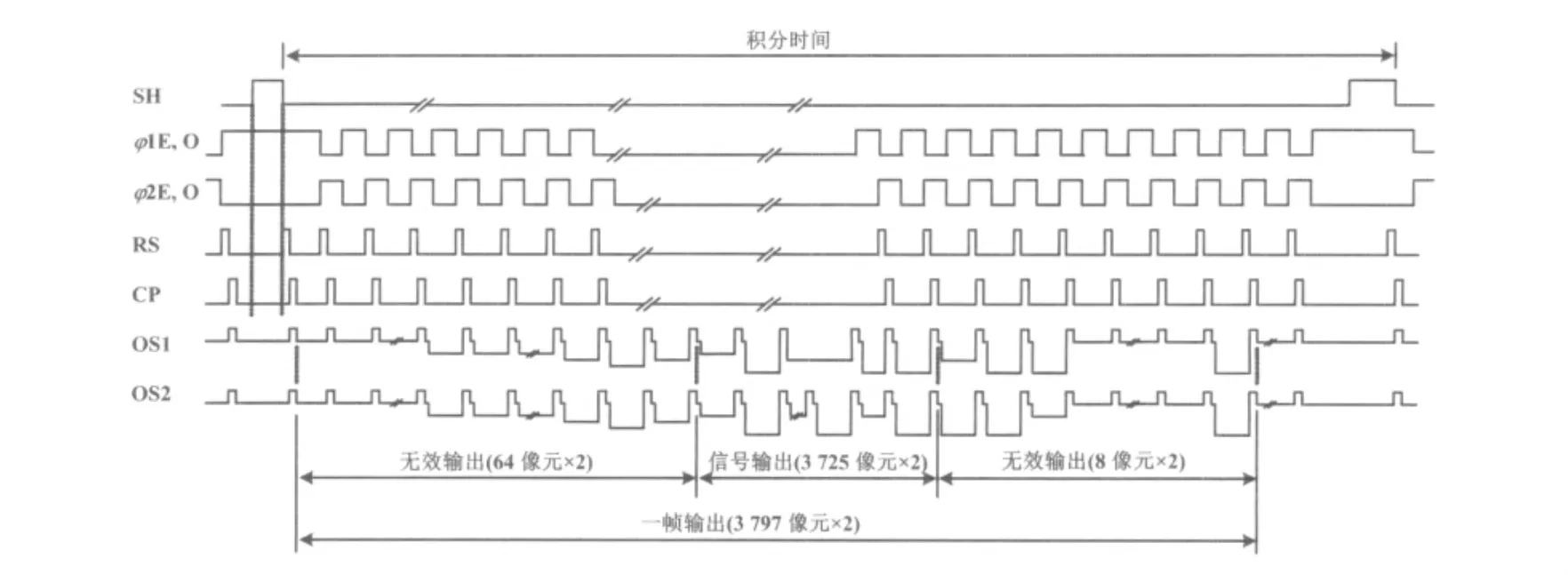
圖3 TCD1708D驅動脈沖時序圖Fig.3 TCD1708D drive pulse timing
TCD1708D采用兩相驅動脈沖工作,在移位脈沖(SH)、電荷轉移脈沖(φ1E,O 和 φ2E,O)、復位脈沖(RS)和鉗位脈沖(CP)這5路脈沖驅動下正常工作。SH的上升沿意味著線陣CCD開始輸出信號。單相脈沖在依次輸出64個無效信號、3725個有效信號后,再輸出8個無效信號。因此,積分時間至少是3797個脈沖寬度的時間。
為了配合后續電路,取周期數為4000。當SH為高電平時,為電荷轉移階段,φ1E必須同步為高電平;當SH為低電平時,光敏區對采光進行攝像,MOS電容對光生電子進行積累,φ1E也同步為低電平。但φ1E脈沖必須比SH脈沖提前上升、滯后下降。φ1E脈沖先上升意味著移位寄存器中接收電荷包的勢阱先形成,有利于電荷的轉移;而φ1E脈沖比SH脈沖后下降到低電平,是使存儲柵和移位寄存器隔離,以免φ1E電極下的電荷倒回到原勢阱。
在本系統中,晶振提供30 MHz的輸入時鐘信號給CPLD作為全局時鐘信號,每個時鐘周期為33 ns。φ1、φ2的工作頻率為200 kHz,由主時鐘經150分頻產生,占空比為1∶1。RS、CP工作頻率均為200 kHz,占空比為1∶4,CP的相位要稍稍落后于RS。
設計中,本文采用 Altera公司 MAX-II系列的EPM1270T芯片。該芯片內部有1270個邏輯單元,能夠通過JTAG口進行調試,從而滿足設計要求。程序設計語言采用純文本文件Verilog HDL,并采用自頂向下的設計方法,移植性和可擴展能力較強,通用性也較好。
3 試驗結果與分析
本設計采用的CPLD開發平臺為Quartus II 7.1。在Quartus II 7.1軟件中設定好所需的參數后進行仿真試驗。Quartus II開發系統是一種可編程的設計環境,支持原理圖、VHDL、Verilog HDL等多種設計輸入形式,界面統一、操作便捷。當輸入時鐘信號頻率為30 MHz時,SH、e1、e2、RS、CP 時序均滿足線陣 CCD 的驅動要求。TCD1708D各脈沖仿真波形如圖4所示。

圖4 TCD1708D各脈沖仿真波形圖Fig.4 Simulation wave of each pulse of TCD1708D
將編寫的源程序編譯后下載到CPLD的EPM1270T芯片中,對實際電路進行測量調試。調試結果表明了本驅動時序的正確性。
4 結束語
根據空間物體外姿態測量系統線陣CCD數據采集的要求,設計了線性 CCD驅動脈沖時序。基于Verilog HDL語言的脈沖時序設計使得移植性較高,為后期維護提供了方便。當輸入時鐘信號頻率為30 MHz時,線陣CCD輸出的兩路實測像素信號與驅動提供的像素信號輸出頻率相符,數據的輸出速率達50幀/s。仿真和硬件試驗表明,該方法滿足系統的設計要求,具有可行性。
[1]Lee A Y,Yu J W,Kahn P B.Space interferometry mission spacecraft pointing error budgets[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(2):502-514.
[2]許江寧,朱濤,卞鴻巍.GPS姿態測量技術綜述[J].海軍工程大學學報:自然科學版,2003,15(3):17-22.
[3]胡寶潔,曾巒,熊偉,等.基于立體視覺的目標姿態測量技術[J].計算機測量與控制,2007,15(1):27-29.
[4]金龍旭,李國寧,劉妍妍.幀轉移型面陣CCD驅動電路的設計[J].光學精密工程,2008,16(6):1140-1145.
[5]杜昕,汪小澄.線陣CCD數據采集及LCD顯示[J].自動化儀表,2007,28(12):36-38.
[6]盛翠霞,張濤,紀晶,等.高分辨率CCD芯片FTF4052M的驅動系統設計[J].光學精密工程,2007,15(4):564-569.
[7]秦志軍,王廣志,駱文博,等.基于線陣CCD的大視場高精度三維實時定位系統[J].清華大學學報:自然科學版,2002,42(S1):39-42.
[8]Wu J,Wen Q T.The method of realizing the three-dimension positioning based on linear CCD sensor in general DSP chip[C]//The 30th Annual International IEEE Engineering in Medicine and Biology Society Conference,Vancouver,British Columbia,Canada,2008:2302-2305.
[9]彭曉鈞,何平安,袁炳夏.基于CPLD的線陣CCD驅動電路設計與實現[J].光電子·激光,2007,18(7):803-807.
[10]Yu G P,Xie Y G.Research of automobile speed measuring system based on linear CCD[C]//International Conference on Control,Automation and Systems Engineering,2009:148-151.
[11]Li F B,Li Z K,Li Q.Design of three high-speed CCD linear image sensor synchronous driving,amplifying and A/D circuit[C]//International Conference on Networking and Digital Society,2010:575-578.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21