逆向工程技術在軌道交通車輛造型設計中的應用
2013-12-04 09:17:10呂元穎1上海同濟大學2018042上海軌道交通設備發展有限公司200233
裝備機械 2013年2期
呂元穎1上海同濟大學 (201804) 2上海軌道交通設備發展有限公司 (200233)
呂元穎(1984年~),男,碩士研究生,工程師,主要從事軌道交通車輛的設計研制。

1 逆向工程概念
傳統的正向工程,是產品從無到有的實現過程。一般工業產品開發是先確定目標造型和功能,接著構思產品結構,然后進行產品每個零部件的設計、分析、制造以及檢驗,再經過裝配、性能測試等程序完成整個開發過程。每個零部件都有設計圖樣,按確定的工藝文件加工,正向工程設計流程如圖1所示。
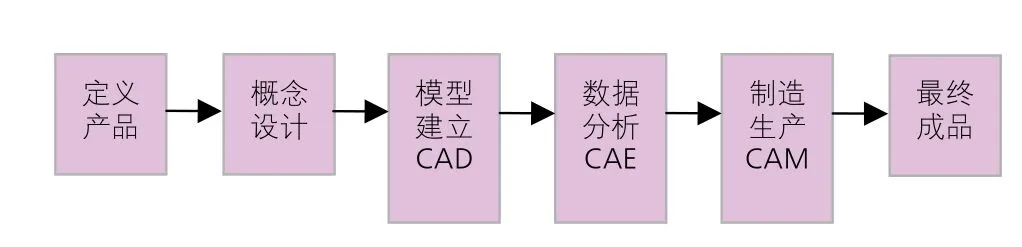
圖1 正向工程設計流程
不同于正向工程,逆向工程(Reverse Engineering)也稱為反向工程或反求工程,是在20世紀80年代初才開始發展起來的一項新技術,是一種成型產品或模型的再現過程,逆向工程是在不侵犯目標產品的知識產權基礎上,對一項目標產品或模型進行逆向分析及研究,從而演繹并得出該產品的處理流程、組織結構、功能特性、形狀輪廓及技術規格等設計要素,以用于該產品的修改、分析、制造、檢驗、裝配、測試等多種目的,逆向工程設計流程如圖2所示。
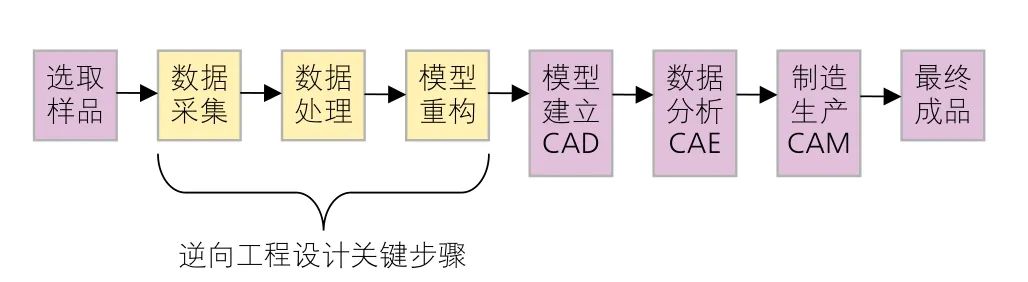
圖2 逆向工程設計流程
對于逆向工程設計流程而言,數據采集、數據處理、模型重構是關鍵步驟,需要軟、硬兩方面的技術的結合。硬件方面,需要能精密測量、采集坐標點的掃描工具;軟件方面,需要能對所得數據點云的處理及模型重構的軟件技術。
2 逆向工程的基本應用情況
目前,逆向工程主要應用于以下幾種情況:
(1)在概念設計階段采用實物模型作為鑒定依據的產品,這些實物模型通常由黏土、工程塑料、石膏等材料制作而成。
(2)已經成形或投入實用卻缺乏生產圖樣的產品,特別是在CAD/CAM 出現前所設計的產品,或者無任何資料的產品。
(3)修改后的產品。在按照圖樣生產時,由于工藝、美觀等方面原因,對模具進行修改但并未做記錄的產品。
(4)需設計再利用的產品。通過載入以前產品的CAD模型數據,通過逆向工程設計出新品種產品。該方法無需對已有產品進行數據采集,但需要對已有模型進行數據處理和模型重構。
(5)數字化模型檢測的產品。對加工后的產品進行掃描測量,再利用逆向工程構造出CAD 模型,產生的模型與初始CAD模型進行數據比較。
3 逆向工程在軌道交通車輛設計中的應用
本文設計對象為國產化A型地鐵列車司機室,司機室外殼一般由玻璃鋼(FRP)或鋁合金面板拼接而成,其結構的特點在于組成外輪廓的各個零部件多為尺寸大而形狀復雜的空間曲面。由于這些大型覆蓋件多為高次方程曲面,所以不能用一般的CAD方法將它們完整、清晰地表達出來,且考慮到司機室外形和功能的確定需要通過以實物模型作為設計依據,因此,該車輛司機室外輪廓設計通過逆向工程來實現。
3.1 選取樣品
對于逆向工程來說,選取樣品并非關鍵技術環節,卻是整個設計流程中的起始點,且決定了所設計最終目標的大致方向。樣品可以是已經運營或設計完成的地鐵、輕軌、高鐵車輛的司機室外輪廓;也可以是一個由木材或工程塑料做成的司機室輪廓模型。由于為了滿足空氣動力學、外形造型美觀、本身功能等要求,軌道交通車輛司機室外形已從原來的平直、方正等形狀逐步演變成賦有動感和立體感的流線型、圓潤型等外形輪廓,且這些輪廓基本上都有多個復雜曲面拼接而成,所以傳統的正向工程采用的CAD三維建模設計方案已經無法滿足復雜曲面設計要求,而更具自由特點的實物模型設計方法被應用到司機室外輪廓方案設計中。選用樣品為由ABS工程塑料制造而成的模型,比例為傳統地鐵車輛司機室模型的五分之一,模型如圖3所示。
3.2 數據采集
數據采集是逆向工程的第一個關鍵技術環節,它是指通過特定的測量設備和測量方法獲取產品表面離散點的三維幾何坐標數據。高效、準確地采集到產品表面的三維幾何坐標數據,是實現逆向工程的基礎和重要技術之一。根據測量的方式不同,可以將三維測量設備分為接觸式和非接觸式兩大類型。
(1)接觸式測量法
接觸式測量法通常是指三坐標測量機法(Coordinete Measuring Machine),簡稱CCM。三坐標測量機法主要應用于由基本的幾何形體(如平面、圓柱面圓錐面、球面、流線型曲面等)構成實體的數字化過程,適用于測量實體外部的幾何形狀。采用該方法可以達到很高的測量精度,且對測量對象顏色和光照沒有要求,但該方法測量速度較慢,且對軟質材料適應差。CMM有兩種不同的測量方式,點對點測量法(Point to Point Method)和截面掃描法(Section Scanning Method)
(2)非接觸式測量法
非接觸式測量法采集實物模型的表面數據時,測頭不與實物表面接觸,它們利用某種與物體表面發生相互作用的物理現象來獲取其三維信息,如聲、光、電磁等。其中應用光學原理發展起來的現代三維形狀測量方法應用也比較廣泛,如三角形法、結構光法等。激光三角法是采用激光作為光源,照射到被測物體上,利用CCD 接受漫射光成像點,根據光源、物體表面反射點、成像點之間的三角關系計算出表面反射點的三維坐標。此方法已經成熟,目前已走向實用。結構光投影測量法被認為是目前三維形狀測量中較好的方法,它的原理是將具有一定模式的光源,如柵狀光條投射到物體表面,然后用兩個鏡頭獲取不同角度的圖像,通過圖像處理的方法得到整幅圖像上像素的三維坐標,這種方法具有速度快、無需運動平臺的優點。
考慮到司機室外輪廓模型主要以圓滑或流線型大面積曲面為主,且需要高精度數字化要求,所以采用Globa Silver三坐標測量機,其三維空間精度可以達到1~2 μm,三坐標測量機如圖4所示。

圖4 Globa Silver三坐標測量機
測量機的測頭沿著司機室外輪廓模型的表面連續掃描,針對復雜的三維邊界曲面進行數據測量時不能完全到達被測部位的邊界,在這里采用柱形側頭點接觸式測量司機室模型外輪廓邊界,保證測準三維邊界一個方向(測頭方向)上的數據,然后再沿測頭方向投影實測邊界曲線到延伸后的曲面,利用投影曲面對曲面進行裁剪獲得逆向工程數字化模型邊界。最終,把采集的數據存入計算機形成“點云”文件,以asc格式輸出。
3.3 數據處理
數據處理是逆向工程的第二個關鍵技術環節,它決定了模型重構過程是否能夠方便、準確地進行。使用Globa Silver三坐標測量機測取的司機室外輪廓模型三維幾何坐標數據都是一些離散點的點云數據,其中,數據存在著噪聲點和數據的重疊、缺失,尤其是尖銳邊和邊界附近的測量數據,所以還需要相應的軟件來處理點云數據。點云數據的處理包括噪聲去除、多視對齊、數據精簡、數據光順、數據分割等諸多方面。預處理通常要經過以下步驟:
(1)異常點處理;
(2)數據精減;
(3)數據插補。
目前比較常用的逆向工程軟件有:
Imageware、Geomagic Studio、CopyCAD、
RapidForm、UG、I-DEAS、Pro-E等。由于該軌道交通車輛研發基于CATIA V5平臺進行開發設計,為了便于設計兼容性和后續連續性,所以將測量獲得的點云數據通過CATIA V5 軟件的DSE模塊進行數據處理,導入后形成的司機室模型外輪廓點云數據如圖5所示。

圖5 點云數據圖
這里采用的是三坐標測量機獲得的散亂的點云,可利用直觀檢查法,通過CATIA V5軟件對點云數據進行初步檢查,再通過圖形終端,用肉眼直接通過CATIA V5軟件將與截面數據點集偏離較大的點或存在于屏幕上的孤點剔除。由于接觸式測量已將零件的特征值完整采集,所以不需要進一步做數據的精減或插補處理,經過去噪后的司機室模型外輪廓點云圖如圖6所示。
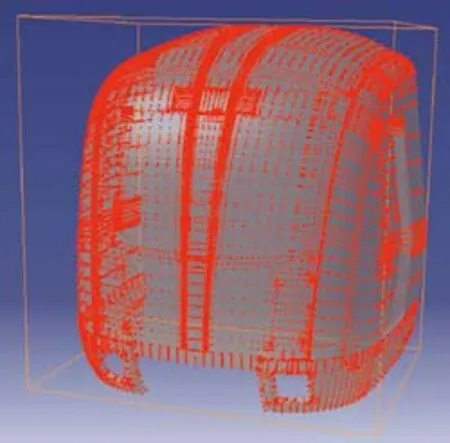
圖6 去噪后點云數據圖
3.4 模型重構
模型重構又稱曲面重構,是逆向工程的第三個關鍵技術環節,它是指通過軟件將模型點云數據根據特征進行分割,然后對分割的數據點云重構形成曲面片。由于司機室模型外輪廓曲面并非由簡單的線段或圓弧等簡單圖形元素組成,所以必須用更先進的描述手段─光滑的自由曲面來描繪。
自由曲面一般用參數曲線曲面表示,常用的有Bezier、B—Spline和NURBS等表示方式。這里通過CATIA V5軟件采用NURBS方法進行司機室模型外輪廓曲面重構。NURBS是解析曲線曲面和自由曲面的綜合曲面(非有理B樣條、Bezier曲面都是NURBS的特例表示)。NURBS曲線和曲面方程如下:
(1)NURBS曲線方程
一條p階NURBS曲線被定義作:
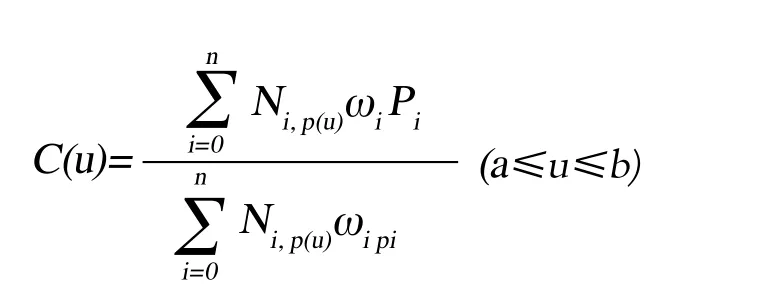
式中{Pi}— 控制點(形成控制多邊形);
除非另述,一般假定a=0,b=1及對于所有的i都有ωi>0。
(2)NURBS曲面方程
u向p階、v向q階的NURBS曲面定義為:
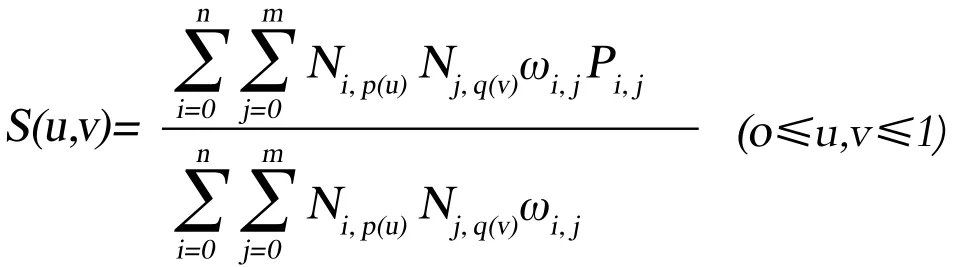
式中{Pi,j}—構成曲面控制點網;
通過CATIA V5軟件,用NURBS曲面可通過控制點和權值方便靈活地控制司機室模型外輪廓曲面形狀,能有效進行插入節點、修改、分割和幾何插值等處理,并具有透視變換和放射變換的不變性等優點。模型最終以并以IGES 格式存儲,便于后期模型曲面增厚和優化等CAD方法處理,司機室外輪廓模型重構如圖7所示。
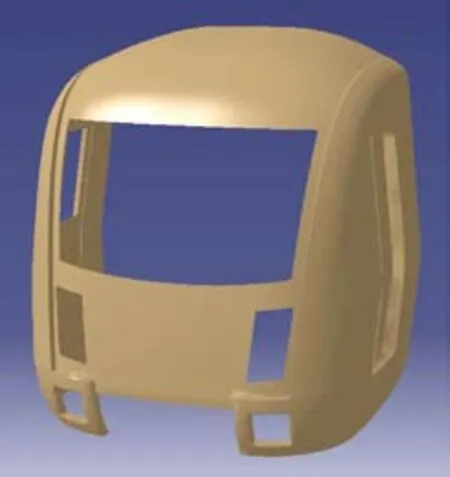
圖7 重構后的模型圖
4 展 望
逆向工程改變了傳統鐵路和城市軌道交通車輛外觀及功能設計開發模式, 大大縮短了車輛司機室及其他零部件開發周期,提高了車輛的整體美觀及性能、工藝質量以及加工效率,并且減輕了設計人員勞動強度,降低了開發成本。
當然,由于軌道交通車輛部分零部件曲面構造復雜導致數據測量、數據處理、模型重構這三大步驟仍存在著不穩定性。但隨著測量硬件設備和計算機軟件智能化的發展,將來有望形成集成化的軌道交通車輛設計逆向工程系統,為軌道交通車輛設計提供更多方便和支持。
[1]金濤,童水光等.逆向工程技術[M].北京:機械工業出版社,2003.
[2]趙洪倫.軌道車輛結構與設計[M].北京:中國鐵道出版社,2009.
[3]徐伯初.軌道交通車輛造型設計[M].北京:科學出版社,2012.
[4]朱心雄.自由曲線曲面造型技術[M].北京:科學出版社,1998.
[5]王霄.逆向工程技術及其應用[M].北京:化學工業出版社,2004.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
太空探索(2016年6期)2016-07-10 12:09:06
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
