精密PSD 微位移在線測量系統
2013-12-06 12:11:00宋殿友劉鐵根丁小昆李志宏
天津大學學報(自然科學與工程技術版) 2013年2期
宋殿友 ,劉鐵根,丁小昆,李志宏
(1. 天津大學精密儀器與光電子工程學院,天津 300072;2. 天津理工大學電信學院,天津 300384;3. 薄膜電子與通信器件天津市重點實驗室,天津 300384)
在工業生產中,許多產品幾何特性的在線檢測不僅要求做到非接觸連續測量,還要求精度不受被測物移動以及外界環境的影響.激光微位移測量系統不僅能較好地滿足這些要求,而且測量精度高、測量距離遠、重復性強,因此越來越多地被應用在工業生產中.
激光微位移測量系統采用的光電傳感器主要有CMOS、CCD 和PSD 等.目前,歐美和日本在這方面的研究處于領先水平[1-2],并且已經有比較成熟的基于PSD 的激光位移傳感器產品,比如日本Keyence公司的 LD 系列、德國 Micro-Epsilon 公司的optoNCDT 系列、美國MEDAR 公司的2101 型等產品,均采用直射式或斜射式激光三角法,分辨率在0.01%~0.1%之間,但在適應不同被測物體表面狀況時,一般都通過數控電位器調節采樣信號強度或通過改變光源電流來調節有效光的強度,這樣不僅使得系統結構復雜而不利于系統集成,還由于噪聲和成像光斑光強分布微變等帶來一系列測量誤差[3].而在適應不同被測物測量環境的變化方面,尤其是溫度變化,這些產品都采用價格昂貴的精密元器件,以減小溫度變化的影響,但溫漂仍高達滿量程的±0.02%/℃,有些產品甚至高達滿量程的±0.05%/℃,因此,在溫差較大的測量環境下[4-5],無法滿足測量精度的要求.而國內應用的多為基于CCD 的位移傳感器[6-8].盡管近年來國內對PSD 的微位移測量進行了大量研究,但由于對PSD 的研究起步較晚,基于PSD 的激光微位移測量系統尚處于實驗室研究階段.呂愛民等[9]對位置指示光源對PSD 定位精度的影響進行了實驗研究,郭麗峰等[10]對PSD 的非線性修正技術進行了研究,劉鐵根等[11]對PSD 測量中激光源波長的優選進行了研究,但還沒有基于PSD 的高精度、高可靠性的微位移產品出現.
筆者充分利用PSD 的固有特性,采用基于變頻調制、高階帶通濾波、峰值檢測等技術的PSD 信號單通道處理方式和激光三角法相結合的設計方案,簡化了結構,并進一步降低了溫漂和被測物表面狀況的影響,制作了低成本和高適用性的精密激光微位移在線測量系統.
1 測量原理
本系統采用一維PSD 和直射式激光三角法,測量原理如圖1 所示,由PSD 特性公式可以得出像斑在PSD 上的位移x ,則被測物位移大小可以根據幾何關系求得[12],即.

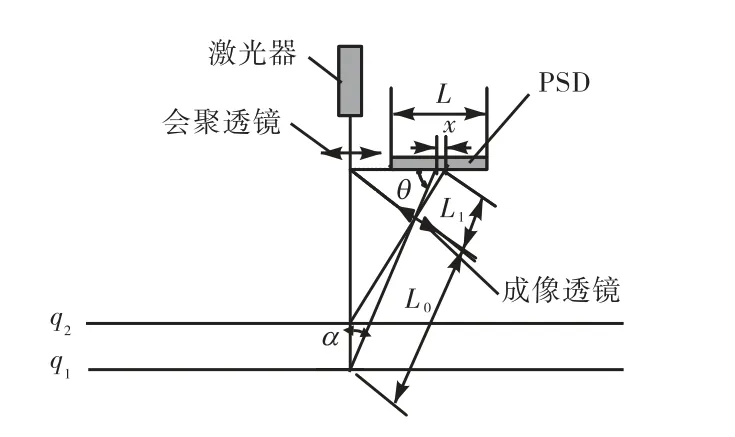
圖1 激光三角法測距原理Fig.1 Schematic diagram of measuring the distance based on the laser triangulation
2 樣機設計
2.1 系統框圖
PSD 激光微位移測量系統框圖如圖2 所示,該系統由激光器、會聚透鏡、成像透鏡、一維PSD、激光調制電路、I/V 轉換電路、通道切換電路、比例放大電路、濾波電路、峰值檢測電路、集成ADC 微控制器及外部接口電路等組成.從小型半導體激光器發射出650,nm 的調制紅光,經過會聚透鏡形成比較理想的光斑照射在被測物上,然后通過成像透鏡對漫反射光的匯聚將光斑成像于PSD 上.當被測物發生位移時,成像于PSD 光敏面上的光斑位置會發生變化,進而改變了從PSD 兩端輸出的調制電流信號強度.該微電流信號經過處理后,由微控制系統采集并通過運算得到被測物的位移量.同時,系統可通過外觸發采樣接口控制采樣,從而實現多設備同步采樣,系統還可以通過RS232 通信接口對系統進行標定、采集頻度設定、通信波特率設定等功能以及相應查詢功能.
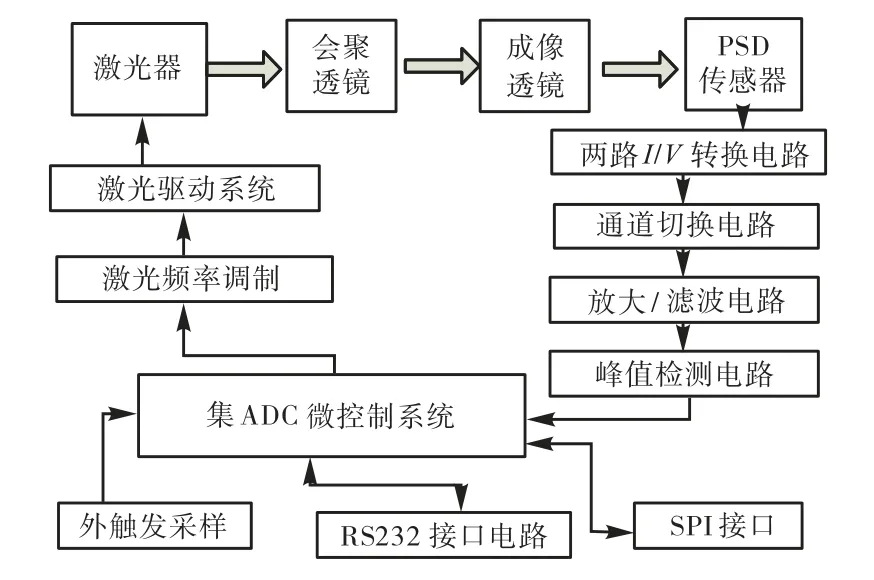
圖2 PSD激光微位移測量系統框圖Fig.2 Schematic diagram of PSD laser micro-displacement measurement system
2.2 光路系統
光路系統主要由激光光源、會聚透鏡、成像透鏡和光電探測器PSD 等組成.
傳統的激光測量系統都通過窄帶濾光片來濾掉背景光對測量的影響,但當被測物本身發出的光與信號光源的波長相近時(如熱軋板厚度測量),濾光片無法達到系統要求.因此系統通過調制波長λ為650,nm的激光光源,從而在沒有濾光片的情況下,有效地消除背景光的影響.
會聚透鏡的作用主要為準直和聚焦,能將激光器發出的光會聚為具有一定焦深、尺寸較小的光斑,從而降低了測量誤差[13].成像透鏡將不同角度的散射光集中在PSD 感光接收面上,若采用多片透鏡組合,可使其像差減小,進一步提高測量準確度[14].
光電探測器采用濱松公司生產的 S3932 型PSD,該型號PSD 有效感光面積為12,mm ×1,mm,光譜響應范圍為 320~1,100,nm,峰值靈敏度為0.55,A/W,位置分辨率為0.3,μm.
2.3 PSD單通道信號處理
通常,基于PSD 的微位移測量系統對PSD 兩端輸出的電流信號由2 個獨立的信號處理通道進行處理,如圖3 所示,但是當采用調制模式時,由于信號增益系數與調制頻率以及系統的中心頻率和帶寬是直接相關的,而中心頻率和帶寬與系統所用器件的阻容特性是密切相關的,因此即使采用價格昂貴的精密元器件,隨著溫度變化,2 個通道的增益系數也很難調節一致,從而造成測量誤差.
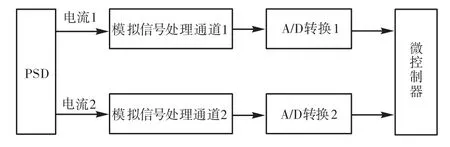
圖3 PSD信號雙通道處理框圖Fig.3 Schematic diagram of PSD signal processing based double channels
為解決該問題,系統通過通道切換將PSD 輸出的兩路信號在同一信號處理通道處理,電路如圖4 所示,這樣不僅使PSD 兩端的輸出信號得到了一致處理,而且還簡化了結構、降低了成本.

圖4 PSD信號單通道處理電路Fig.4 Circuit diagram of PSD signal processing based single channel
系統還通過調制激光、I/V 轉換和比例放大電路,將PSD 輸出的微弱有效電流信號變為一定頻率的易于采集的電壓信號,然后通過帶通濾波器,消除了暗電流和背景光對系統的影響.峰值檢測電路大大降低了系統對A/D 轉換器采集頻度的要求,保證了對PSD 兩端輸出信號的同相位采集,進一步減小了測量誤差,同時,通過放電電路實現了系統的高速動態測量.
電路中采用失調電壓和偏置電流非常小的AD公司的OP27 運算放大器設計電路對模擬信號進行處理.用Silicon Lab 公司的內置采樣速度可達1,MS/s的16 位ADC 的C8051F060 單片機作為主控.
2.4 激光自適應調制
在實際應用中,由于不同被測物體的表面反射率不同,使得PSD 感光面上接受的調制激光光強也不同,從而造成PSD 輸出的調制電流強度變化較大,無法充分利用A/D 轉換器的采集范圍,甚至超出范圍而不能測量.所以應根據被測物體表面狀況自適應調節信號強度的增益系數或激光強度.
現有的系統一般都通過采用數控電位器來改變信號增益系數或通過改變激光器電流調節激光強度,但是數控電位器的非連續性有時無法達到系統要求,并且本身的噪聲也會影響測量精度.而改變激光器光強不僅使得激光器電源電路復雜,還會因為光斑的高頻噪聲變化和光斑整體偏移使得光斑光強分布微變,從而產生測量誤差,本系統中采用了信號帶通濾波技術,濾波器的中心頻率f0為40,kHz,Q 值為7,其幅頻特性可表示為
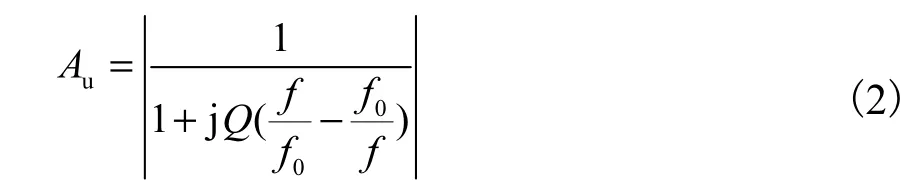
式(2)表明,當通過濾波器的信號頻率f 從f0開始不斷增大時,信號的放大倍數Au會逐漸減小,當信號頻率增大至2,f0時,信號衰減了-20,dB,也就是說,當信號頻率從80,kHz 變化到40,kHz 時,信號的強度可以變化10 倍.因此,筆者先通過測量反射率最高的白色平面,調整電路將濾波器的輸入信號強度調整到運算放大器線性放大范圍的最大值(本系統為12,V),且初始激光調制頻率為55,kHz.這樣,當采集到的PSD 兩路信號強度之和大于A/D 轉換器的采集最大值一定范圍時,系統自動增大激光的調制頻率,反之則自動減小激光調制頻率,改變信號在濾波器上的衰減程度,實現采集信號強度的連續改變,使信號強度總處于A/D 轉換器的最佳采集范圍.另外,如果和數控電位器改變增益系數相結合,可以實現對具有極低反射率物體測量,從而全面解決了被測物表面反射率不一致造成PSD 輸出的調制信號強度變化較大的影響,提高了系統精度和實用性.
3 實驗與分析
3.1 標定測量
根據結構設計和PSD 參數,該系統最大量程為9,mm,系統理論分辨率為0.002 5%,但受噪聲影響,大量實驗結果表明,系統實際分辨率達到0.035%.采用精度為10,μm 的螺旋測微器對系統進行標定,并使系統輸出數據為光斑在PSD 成像位置.首先微調使PSD 輸出數據為2,000,μm,以此為原點,以500,μm為步長測量了12 個點,即標定范圍為0~6,000,μm,結果如圖5 所示.采用最小二乘法擬合一條直線如圖5 所示,可表示為

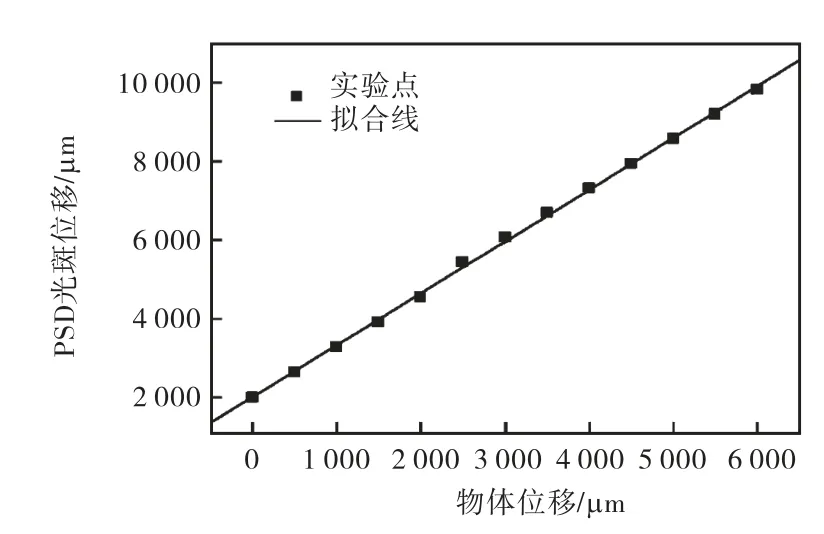
圖5 標定曲線Fig.5 Calibration curve
則線性相關系數R 為0.999 54,線性度好于1.2%.
3.2 穩定性測量
為了考察系統的穩定性,選一固定位置,從系統開機開始測量,每隔30,s 保存1 次數據,連續監測了12,h,得到的結果如圖6 所示.
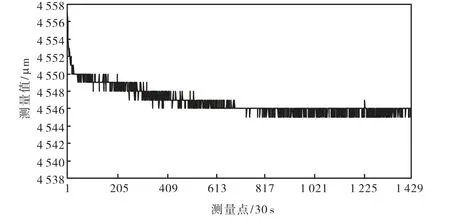
圖6 系統穩定性測量Fig.6 Stability measurement of the system
由圖6 可見,系統開始運行的前10 min,數據呈急劇下降的趨勢,這主要是因為半導體激光器的穩定需要一段時間,在初始運行階段由于激光強度穩定度較差和光斑不夠均勻造成測量誤差較大[15].當激光強度趨于穩定后,測量數據基本穩定.從圖6 中可以看出在30,min以后的11,h里,穩定性誤差小于0.09%.
3.3 影響因素和誤差分析
影響測量結果的外界因素主要有背景光、暗電流、溫度和被測物表面狀況等.設計了3 個實驗,分別對背景光、暗電流、溫度和被測物表面狀況等對測量的影響進行了測量.
3.3.1 實驗1
在沒有濾光片的情況下,分別在日光、日光燈光和熱輻射紅外光3 種背景光下對3 個固定位置進行測量,測量結果(光斑在PSD 的位置)見表1.
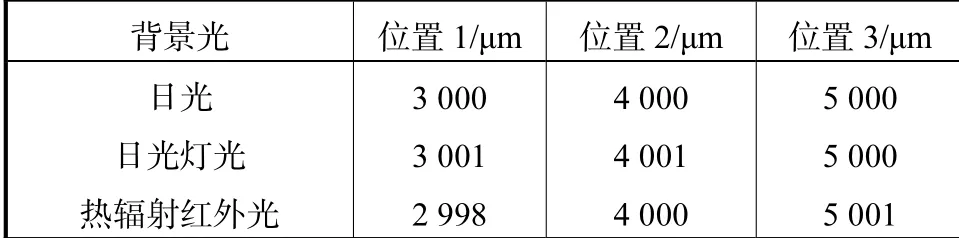
表1 背景光影響實驗結果Tab.1 Results of background light influence experiment
從表1 可以看出,3 種背景光對系統測量的影響產生的誤差遠遠小于穩定性測量誤差,因此可以認為影響忽略不計.這是因為系統帶通濾波器的中心頻率為40,kHz,帶寬為8,kHz,而背景光和暗電流強度變化頻率較低,一般都在1,kHz 以下,這樣就有效地消除了背景光對測量的影響,同樣,也消除了暗電流對測量的影響.
3.3.2 實驗2
采用電熱恒溫鼓風干燥箱,分別設定20,℃、30,℃、40,℃和50,℃ 4 種溫度,在4 種溫度下,分別采用PSD 信號單通道處理模塊和傳統的PSD 信號雙通道處理模塊進行測量,同時為避免半導體激光器光斑的不均勻性影響測試結果,調整系統使PSD 兩端輸出幅值相等的電流信號,測量結果(光斑在PSD的位置)見表2.
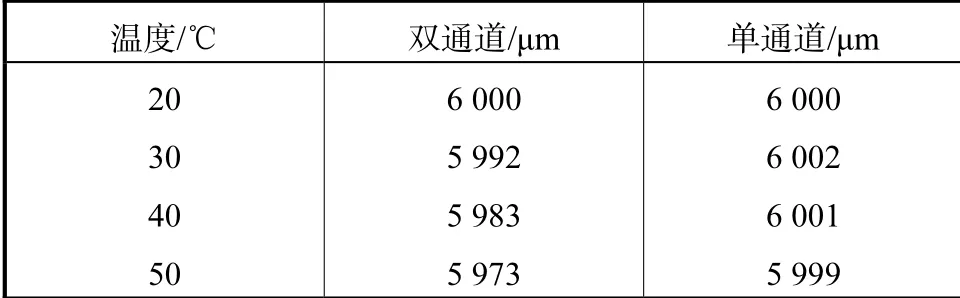
表2 溫度影響實驗結果Tab.2 Results of temperature influence experiment
從表2 可以看出,PSD 信號雙通道處理系統測量結果隨著溫度升高逐漸變小,誤差逐漸增大,這是由于系統的兩路信號處理通道受溫度變化影響造成兩通道的調制信號增益系數不一致所引起的.而單通道處理系統測量結果遠遠小于穩定性測量誤差,因此可以認為,通過對PSD 輸出信號采用單通道信號處理方式大大消減了溫度對測量的影響,從而使測量系統更能夠適應溫差較大的生產環境.
3.3.3 實驗3
對同一固定位置進行測量,并將該位置表面分別涂上灰度值為10%、40%和70%的灰色,從而使被測表面有3 種不同的反射率.測量輸出量為激光調制頻率、PSD 兩路信號強度之和以及光斑在PSD 的位置,測量結果見表3.
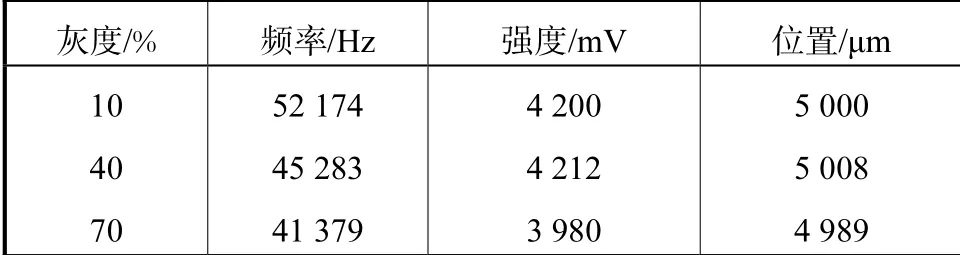
表3 被測物表面狀況影響實驗結果Tab.3 Results of the state of measured surface influence experiment
從表3 可以看出,隨著灰度值的增大,也就是被測物的反射率變小,激光的調制頻率逐漸向中心頻率40 kHz 偏移,從而保證了PSD 兩路信號強度之和在A/D 轉換器采集范圍最大值4 096±200 內(系統中只用了ADC 高12 位),實現了A/D 轉換器的最佳采集.同時,3 次測量位置有所變化,這是由于被測物表面灰色分布不均造成成像光斑重心偏移所致.
4 結 論
(1) 提出了基于信號調制、帶通濾波、峰值檢測的PSD 信號單通道處理方式和激光三角法相結合的設計方案,在沒有濾光片的情況下,有效地消除了背景光、暗電流的影響,同時大大降低了溫漂對測量的影響,使系統能夠適應溫差較大的生產環境.
(2) 系統通過自適應調節激光調制頻率改變采集信號強度,不僅能夠更好地適應各種被測對象,還簡化了系統結構,消除和降低了數控電位器產生的噪聲和光斑光強分布微變所產生的影響.
(3) 設計并制作了測量頻率可達2 kHz,分辨率達0.035%,線性度好于1.2%,電路溫漂系數極小的具有自適應能力的激光微位移測量系統.系統結構簡單、成本低.
[1]Nakajima Hajime,Sumi Kazuhiko,Inujima Hiroshi,et al. High-precision absolute rotary angular measurement by using a multielectrode circular position-sensitive detector[J]. IEEE Transactions on Instrumentation and Measurement,2010,59(11):3041-3048.
[2]Martins R,Fortunato E. Static and dynamic resolution of 1,thin film position sensitive detector[J]. Journal of Non-Crystalline Solids,1996,198:1202-1206.
[3]丁小昆,劉鐵根,宋殿友,等. 激光光斑質量對基于PSD 的激光三角法長時間連續測量精度的影響[J]. 中國激光,2012,39(2):0208006.Ding Xiaokun,Liu Tiegen,Song Dianyou,et al. Impact of accuracy of laser spot quality in laser triangulation long-term continuous measuring based on PSD[J].Chinese Journal of Lasers,2012,39 (2):0208006(in Chinese).
[4]錢建強,王東生,李 鑫,等. 熱軋中板寬度智能檢測儀[J]. 儀器儀表學報,2001(增):229-230.Qian Jianqiang,Wang Dongsheng,Li Xin,et al. An intellectualized measurement instrument for hot-rolled middle plate[J]. Chinese Journal of Scientific Instrument,2001 (Suppl):229-230(in Chinese).
[5]華建新,金以慧,吳文彬. 基于動態板形輥的冷軋板形控制新技術[J]. 鋼鐵,2001,36(1):33-37.Hua Jianxin,Jin Yihui,Wu Wenbin. The new flatness control technique of cold rolling based on dynamic shape roller[J]. Iron and Steel,2001,36(1):33-37(in Chinese).
[6]潘明華,文香穩,朱國力. 俯仰角組合測量系統的設計[J]. 光學精密工程,2011,19(3):598-604.Pan Minghua,Wen Xiangwen,Zhu Guoli. Design of combination measurement system for pitching angles[J]. Optics and Precision Engineering,2011,19(3):598-604(in Chinese).
[7]閆 龍,趙正旭,周以齊,等. 基于CCD 的立體視覺測量系統精度分析與結構設計研究[J]. 儀器儀表學報,2008,29(2):410-413.Yan Long,Zhao Zhengxu,Zhou Yiqi,et al. Accuracy analysis and configuration design of stereo photogrammetry system based on CCD [J]. Chinese Journal of Scientific Instrument,2008,29(2):410-413(in Chinese).
[8]郝鵬飛,張新軍,董志國,等. 基于面陣CCD 的高精度測量技術及應用[J]. 天津大學學報,2008,41(12):1443-1447.Hao Pengfei,Zhang Xinjun,Dong Zhiguo,et al. Area CCD-based high accuracy measurement technology and its application[J]. Journal of Tianjin University,2008,41(12):1443-1447(in Chinese).
[9]呂愛民,袁紅星,賀安之. 位置指示光源對PSD 定位精度影響的實驗研究[J]. 激光技術,2000,24(3):192-195.Lü Aimin,Yuan Hongxing,He Anzhi. Experimental study of the effect of light source on position precision of PSD [J]. Laser Technology,2000,24(3):192-195(in Chinese).
[10]郭麗峰,張國雄,郭敬濱,等. PSD 空間三維非線性修正技術的研究[J]. 光電子·激光,2007,18(5):566-570.Guo Lifeng,Zhang Guoxiong,Guo Jingbin,et al.Study on spatial 3-D nonlinear correction technique for PSD[J]. Journal of Optoelectronics·Laser,2007,18(5):566-570(in Chinese).
[11]宋殿友,劉鐵根,李秀艷. 熱軋薄板測量系統中激光波長的優選[J]. 光電子·激光,2011,22(1):99-102.Song Dianyou,Liu Tiegen,Li Xiuyan. Optimality selection of laser wavelength in the measuring system on thickness of hot rolled sheet[J]. Journal of Optoelectronics·Laser,2011,22(1):99-102(in Chinese).
[12]郁道銀,譚恒英. 工程光學[M]. 北京:機械工業出版社,2004.Yu Daoyin,Tan Hengying. Engineering Optics[M].Beijing:China Machine Press,2004(in Chinese).
[13]張 璁,王雪詳,嚴高師. 激光測距儀單透鏡發射準直模塊的優化設計[J]. 激光與紅外,2009,39(4):383-385.Zhang Cong,Wang Xuexiang,Yan Gaoshi. Optimum design to a single lens transmitted collimating module of laser ranging finders[J]. Laser and Infrared,2009,39(4):383-385(in Chinese).
[14]來新民,王以忠,張大衛,等. 透鏡形式對激光位移傳感器精度影響的研究[J]. 天津大學學報,1999,32(1):81-84.Lai Xinmin,Wang Yizhong,Zhang Dawei,et al. Research on influence of lens type on the accuracy of laserdisplacement sensor[J]. Journal of Tianjin University,1999,32(1):81-84(in Chinese).
[15]王春陽,李金石. 激光光斑漂移的檢測[J]. 應用光學,2007,28(2):205-208.Wang Chunyang,Li Jinshi. Detection of laser spot drift[J]. Journal of Applied Optics,2007,28(2):205-208(in Chinese).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
