動力調諧陀螺儀模型快速開環辨識
2013-12-06 12:11:02李醒飛趙建遠
天津大學學報(自然科學與工程技術版) 2013年2期
楊 光,李醒飛,孫 建,趙建遠
(天津大學精密測試技術及儀器國家重點實驗室,天津 300072)
動力調諧陀螺儀是一種工作于閉環狀態的角速率測量元件.因其內部結構復雜,批量生產難以保證其傳遞函數模型參數一致,同時,這些參數還會因內部機械磨損、應力配合等因素發生改變.為了實時調整回路參數,保證閉環伺服性能,需要對動力調諧陀螺儀傳遞函數參數模型進行快速辨識,為陀螺儀伺服回路設計調整提供依據[1].
目前關于動力調諧陀螺儀傳遞函數模型辨識的研究多使用正弦掃頻信號作為激勵信號,逐點檢測系統對不同頻率正弦信號的響應,獲取系統頻率特性曲線,并通過最小二乘擬合、傅里葉變換等方法得到頻率響應函數[2].該方案具有穩定、可靠等優點,但測試速度較慢,另外在開環測試中,輸入信號幅度受對象特性限制,因而信噪比低,影響辨識精度.激勵信號的選擇在系統傳遞函數模型辨識中起著重要作用,包括信號類型、階次等參數的確定.n 階系統開環可辨識條件是激勵信號滿足2n 階持續激勵條件[3],以充分激發出系統的所有模態.Callafon 等[4]的研究表明激勵信號頻率段應大于對系統所感興趣的頻率段.Pintelon 等[5]指出周期信號的激勵可以簡化辨識算法.采用多正弦信號作為激勵信號兼具上述特點,可以一次性激勵系統在各個頻率上的特征[6],相比掃頻信號效率更高.同時,與最小二乘法相比,基于外加輸入自回歸(auto regressive exogenous,ARX)模型采用預報誤差法進行模型參數估計可以簡化辨識過程,降低參數估計誤差、提高抑制噪聲能力[7-9].
筆者使用多正弦信號作為激勵,對信號帶寬、幅值進行選擇,獲得適宜于慣性元件測試的激勵信號.在此基礎上建立動力調諧陀螺儀模型辨識平臺,獲得實驗數據,并基于ARX 模型采用預報誤差法進行陀螺參數模型辨識.最后對辨識得到的模型進行了有效性驗證.
1 動力調諧陀螺儀模型
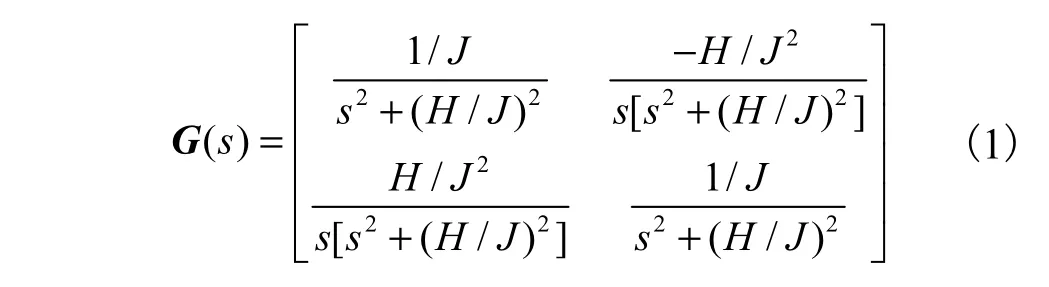
典型的兩自由度動力調諧陀螺儀由陀螺馬達及懸掛在撓性支撐上的轉子飛輪、信號器和力矩器等組成.在調諧狀態下,其傳遞函數模型結構如圖1 所示.圖中:J 為陀螺轉動慣量;H 為陀螺角動量;KT和KP分別為力矩器和信號器增益系數;Φx、Φy分別為陀螺儀殼體相對慣性空間的運動轉角在陀螺儀殼體坐標系Oxyz 的Ox 和Oy 軸上的分量;α、β分別為陀螺儀轉子相對殼體偏角在殼體坐標系Oy 和Ox 軸上的分量;Mx、My分別為作用于轉子上的外力矩M在陀螺儀殼體坐標系Ox 和Oy 軸上的分量.令Φx= Φy= 0,動力調諧陀螺儀開環傳遞函數矩陣可以表示為
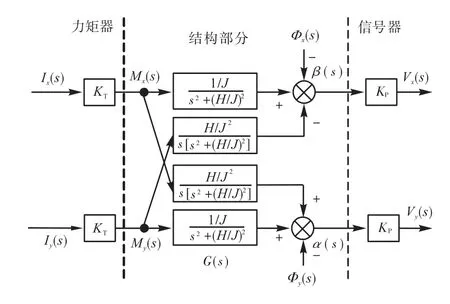
圖1 動力調諧陀螺儀參考模型Fig.1 Reference model of DTG
通過對力矩器施加激勵信號,檢測信號器輸出響應,可以對系統參數模型進行辨識.
2 模型辨識
辨識過程需要考慮輸入輸出數據、模型類和辨識準則3 方面的內容[3].首先進行辨識激勵信號的設計,即如何設計辨識實驗獲取辨識數據.
2.1 辨識激勵信號設計
本文采用多正弦信號作為動力調諧陀螺儀模型辨識的激勵信號,其時域表達式為

式中:ia 為正弦量的幅值;0f 為起始頻率;fΔ 為頻率間隔;iφ為初相角,按線性分布.
可以看出,多正弦信號具有周期性、帶寬和頻譜可以任意精確設定以及無雜散頻率成分等優點.另外,當初始相角按線性分布時,信號可以獲得較低的峰值因子[6],這樣既可以增加輸入信號幅度,提高信噪比,又能保證激勵平穩均勻,適宜于慣性器件的參數辨識.
另外,通過對動力調諧陀螺儀工作頻帶進行加權可以更充分地激發出對象的動態特性.綜上所述,對應激勵信號時域表達式為
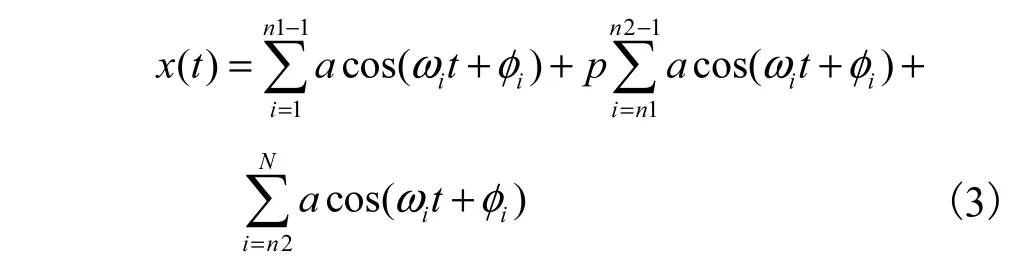
式中p 為對應工作頻帶ωn1~ωn2的加權.
2.2 基于漸進理論的模型辨識
確定辨識信號,并通過辨識實驗獲取輸入輸出數據后,下面需要選擇模型類,并按照相應的辨識準則進行參數估計,得到系統模型估計?(j) Gω.系統辨識漸進定理指出:當系統辨識模型階數n 和數據樣本數N 趨于無窮時,估計模型漸進收斂于真實模型.對于開環實驗,模型估計方差[10-11]為

式中Φu和Φv分別為系統輸入信號和噪聲信號的功率譜密度.
由式(4)可知:①模型估計方差與輸入信號功率譜相關,因此在選取激勵信號加權值p 時,要保證盡可能大幅度激勵對象的工作頻段,以提高模型估計的準確性.②只要能保證足夠的樣本數據和模型階次,模型的估計值將漸近收斂于模型的真實描述.即模型估計的漸近特性與模型結構沒有關系,所以在選取模型類時選擇結構簡單的ARX 模型.
描述動力調諧陀螺儀模型的ARX 模型類可表示為
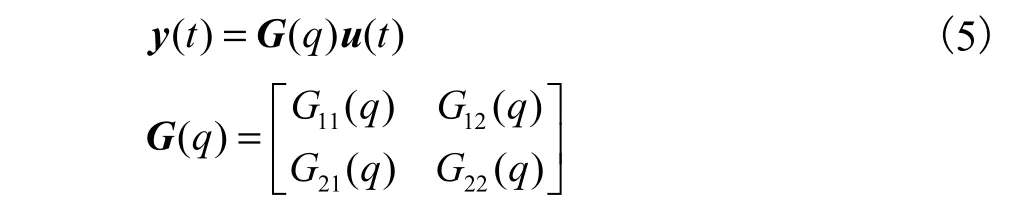
式中:u(t)、y (t)分別為激勵信號、響應信號;Gij(q)為動力調諧陀螺儀子模型,i 和j 分別表示輸出通道和輸入通道序號.
子模型的ARX 模型結構為

對應差分方程可以描述為

模型參數估計采用預報誤差法,該方法不需要數據概率分布的先驗知識,直接極小化預報誤差準則函數即可.模型階的確定采用赤池信息準則(AIC)[3],模型的有效性檢驗采用計算模型預測輸出與實驗數據擬合度的方案.另外,由于動力調諧陀螺儀自身結構及加工裝配工藝限制,系統測試數據會包含馬達轉頻干擾以及陀螺電源頻率干擾等,可以通過數據處理濾除.
3 實驗及結果分析
為驗證實際系統測試效果,以某型號動力調諧陀螺儀為辨識對象進行參數模型辨識測試.選用NI采集卡PCI-6251 對動力調諧陀螺儀施加激勵并采集響應數據,上位機用于對數據進行處理和模型辨識.實驗系統如圖2 所示.
實驗以交叉軸傳遞函數辨識為例(Gij(s),i = 2,j= 1),將多正弦信號作為輸入信號,正弦量幅值300,mV,起始頻率f0=1,Hz,頻率間隔Δf=1,Hz,終止頻率600,Hz,共600 個正弦波疊加,為了保證響應的穩定性,持續激勵20,s.

圖2 動力調諧陀螺儀模型測試系統Fig.2 Model testing system of DTG
根據本文的辨識方法,得到系統ARX 模型為
將以上辨識結果轉換為連續傳遞函數,進而得到系統頻率特性曲線,如圖3(a)所示,可以看出,頻率特性主要包括3 個峰值,其中455,Hz 是反映系統動態特性的章動頻率,250,Hz 和500,Hz 分別為陀螺轉子轉頻干擾以及陀螺電源頻率干擾,并非系統對激勵信號的響應,因此對響應數據中的干擾頻率進行濾波處理,保留反映系統主要動態性的信息,重新進行模型辨識,得到辨識結果為
同上,可以轉換得到動力調諧陀螺儀交叉軸頻率特性曲線如圖3(b)所示.
按照上面測試方法進行5 組重復實驗,擬合結果修正取平均,化簡可得到交叉軸的傳遞函數模型為

由式(10)可以得到參量H 和J 的實測值:H = 0.024 kg· m2· rad/s ,J = 8.4 ×1 0?6kg· m2.這與設計和生產參考值 H0= 0.025 kg· m2· rad/s ,J0=8.8 ×10?6kg· m2具有一致性,驗證了設計指標.
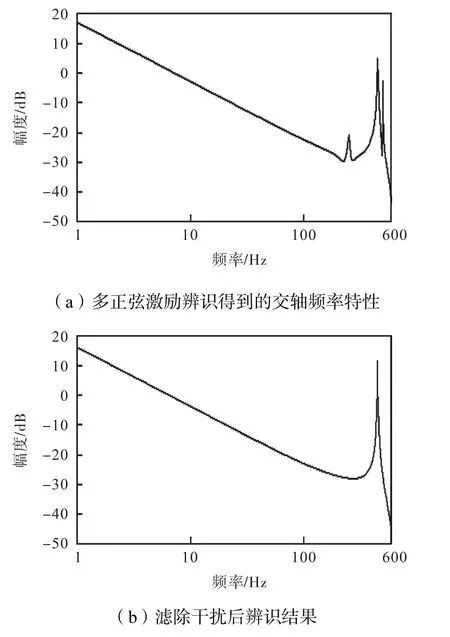
圖3 多正弦激勵辨識結果Fig.3 Identification results got by the motivation of multisine
同時,為了進一步驗證模型的可靠性,將基于該辨識模型獲得的仿真輸出與實驗數據進行對比,結果如圖4 所示,兩組數據擬合度為95.3%,辨識得到的模型足以描述系統主要動態特性,滿足控制器設計的需求.
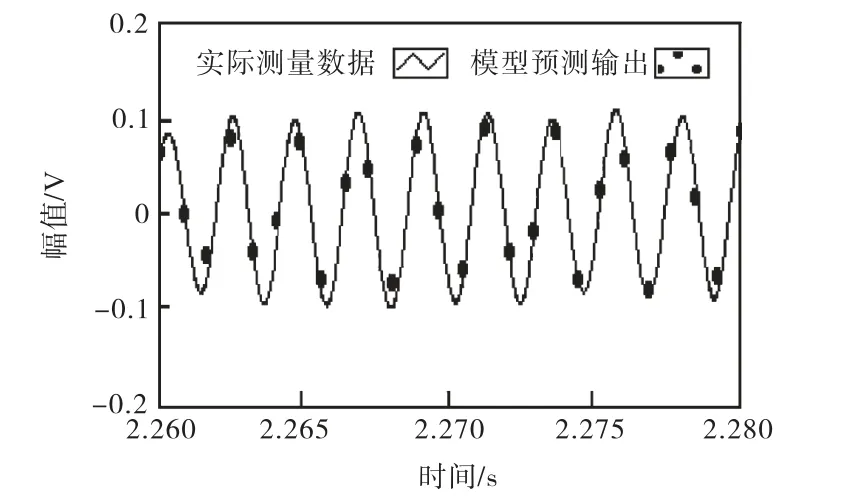
圖4 辨識模型的仿真輸出與驗證數據的比較Fig.4 Comparison between validation data and simulation output of identification model
最后,使用傳統的系統掃頻測試與本方案進行對比驗證,同樣選擇頻段1~600,Hz,進行多次重復性實驗.為防止轉子偏擺過大,掃頻測試信號幅值定為60,mV.激勵時間與前面保持一致,每個頻率持續激勵20,s,共測試100 個頻率點.辨識結果如圖5 所示,可以看到掃頻得到的結果與按本文方案辨識得到的結果具有一致性.
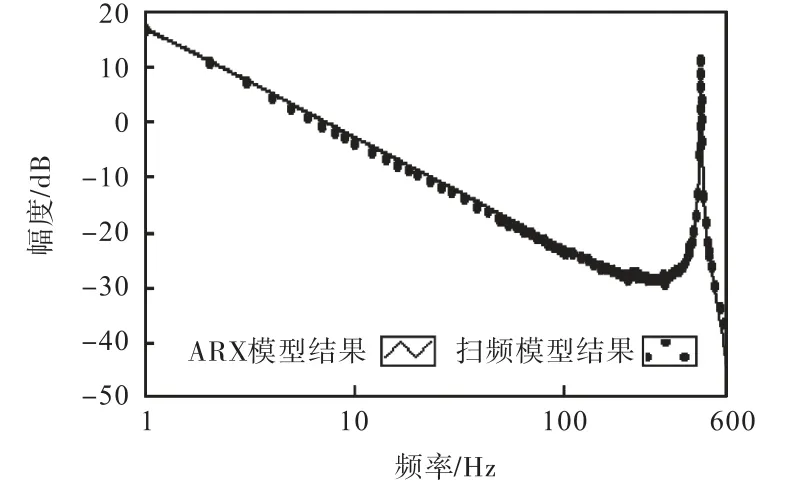
圖5 ARX模型辨識與掃頻得到交軸頻率特性比較Fig.5 Comparison of the cross-axis frequency characteristic got by sweep and the ARX model identification
將兩種方案進行對比,結果如表1所示.由表1 可以看出多正弦信號激勵測試時間約20,s,而傳統掃頻法辨識卻需要2,000,s.可見,由于多正弦信號可以在短時間內對系統工作頻段給予充分激勵,因而采用該方案可極大提高辨識效率.另外,多正弦信號輸入激勵均勻,保證陀螺轉子不會超出限定的工作區間,因而激勵幅值遠高于掃頻信號,同等條件下提高了輸入信噪比,獲得相對較高的模型擬合度.

表1 模型辨識方案比較Tab.1 Comparison of model identification program
4 結 語
實驗結果表明,與掃頻辨識方案相比,采用本文辨識方案,辨識效率得到大幅提高,測試時間由2,000,s 縮短為20,s;進一步改善辨識精度,模型對數據的擬合度由92.5%提高到95.3%;此外,本辨識方案大幅度提高了輸入信噪比.為快速辨識動力調諧陀螺儀的參數模型并進行伺服回路優化設計,保證閉環伺服性能提供了可靠保證.同時,本方案也適用于液浮陀螺、石英撓性加速度計等慣性元件的傳遞函數測試建模.
[1]萬健如,張建松,陳 超,等. 垂直陀螺180°回轉伺服變結構 PID 控制[J]. 天津大學學報, 2006 ,39(8):913-917.Wan Jianru,Zhang Jiansong,Chen Chao,et al. Variable PID control method for 180° back swing serve control system of vertical gyro[J]. Journal of Tianjin University,2006,39(8):913-917(in Chinese).
[2]張連超, 范世 珣,范大鵬,等. 動力調諧陀螺再平衡回路數字化的研究與實現[J]. 光學精密工程,2007,15(12):1974-1981.Zhang Lianchao,Fan Shixun,Fan Dapeng,et al. Research and implementation of digital control of dynamically tuned gyroscope rebalance loop[J]. Opt Precision Eng,2007,15(12):1974-1981(in Chinese).
[3]Ljung L. System Identification:Theory for the User[M].2nd ed. NJ,Upper Saddle River:Prentice-Hall,1999.
[4]de Callafon R A,Van den Hof P M J. Multivariable feedback relevant system identification of a wafer stepper system[J]. IEEE Transactions on Control Systems Technology,2001,9(2):381-390.
[5]Pintelon R,Vandersteen G,Locht L D. Experimental characterization of operational amplifiers : A system identification approach(Part I):Theory and simulations[J]. IEEE Transactions on Instrumentation and Measurement,2004,53(3):854-862.
[6]侯國屏,吳 靜,董甲瑞. Multitone 信號及其在測量中的應用[J]. 清華大學學報: 自然科學版,2007(10):1574-1577.Hou Guoping,Wu Jing,Dong Jiarui. Multitone signals and its applications in measurement [J]. Journal of Tsinghua University:Science and Technology,2007(10):1574-1577(in Chinese).
[7]Yang M,Makis V. ARX model-based gearbox fault detection and localization under varying load conditions[J]. Journal of Sound and Vibration,2010,329(24):5209-5221.
[8]Karny M,Pavelkova L. Projection-based Bayesian recursive estimation of ARX model with uniform innovations[J]. Systems and Control Letters , 2007 , 56(9/10):646-655.
[9]Li H,Wang D,Chen Z. Adaptive Hammerstein predistorter using the recursive prediction error method[J].Tsinghua Science and Technology,2008,13(1):17-22.
[10]Ljung L. Asymptotic variance expressions for identified black-box transfer function models[J]. IEEE Transactions on Automatic Control,1985,30(9):834-844.
[11]Zhu Y C. Multivariable System Identification for Process Control[M]. Netherlands:Elsevier Science Ltd,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
