貝葉斯估計動態汽車衡分時段數據融合研究
2013-12-24 18:08:21
中國測試 2013年5期
?
貝葉斯估計動態汽車衡分時段數據融合研究
李麗宏,徐文舉
(太原理工大學信息工程學院,山西太原030024)
摘要:數據融合是一個多級、多層面的數據處理過程,主要完成對來自多個信息源的數據進行自動檢測、關聯、相關、估計及組合等處理。該文通過分析動態汽車衡的稱重原理,對兩路稱重傳感器不同時段的輸出數據進行分析,提出基于貝葉斯估計的數據融合方法。實驗檢定表明:采用這種融合方法的動態汽車衡稱重誤差小,克服了動態汽車衡由于車輛振動、路面不平和傳感器靈敏度分散性、傳感器線性度誤差等因素對稱量結果的影響,準確度高。
關鍵詞:數據融合;動態汽車衡;貝葉斯估計;自動檢測
0 引 言
動態汽車衡由于其稱量節省時間、效率高等優點,目前已經廣泛應用于高速公路計重收費系統和超限檢測系統。然而,由于車輛振動和路面不平等因素使稱重傳感器的信號輸出摻雜了復雜的干擾因素,使得動態汽車衡的精度無法保障[1]。因此,如何去除這些干擾因素成為動態汽車衡稱重的技術難題。
本文通過對動態汽車衡兩路稱重傳感器不同時段的輸出數據進行分析[2],采用貝葉斯估計的數據融合方法,對單次測量的結果分時段,得到相應的最佳融合數和置信距離矩陣,再通過貝葉斯估計的融合計算方法得到測量值的最終融合結果[3]。
1 基于貝葉斯估計的動態汽車衡分時段數據融合方法
本文提出的方法主要用于解決來自兩路稱重傳感器分時段數據融合的問題,數據處理的目的是獲得對稱重數據更為可靠的估計。其兩路傳感器信號輸出及各部分標注如圖1所示。1為第一路稱重傳感器輸出,2為第二路稱重傳感器輸出,3為兩路傳感器的和,4為有效數據稱量段所有數據的平均值,5為所測車輛的靜態軸重測量值。根據此濾波后的波形,找到第一路傳感器的最大值和第二路傳感器的最大值,將這兩點之間的數據作為有效稱量數據,對這些數據的和求平均值,再根據相應的稱量系數得到車輛實際的輪軸重量值[4-5]。
該算法原理分為置信距離理論、最佳融合數的選擇方法、基于貝葉斯估計的融合計算方法3個部分[6]。

圖1 動態汽車衡兩路傳感器數據輸出
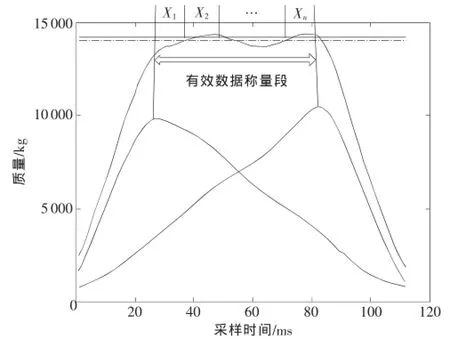
圖2 數據輸出分析
1.1置信距離
為了對稱重傳感器輸出數據進行選擇,必須對其可靠性進行估計。由于被測量的稱重數據真值是未知的,因此對兩路稱重傳感器不同時段的數據之間的關系進行判斷。為了充分利用不同時段稱量數據的先驗知識,該方法根據其統計特性應用了置信距離的概念。
在動態汽車衡稱重系統中,利用兩路稱重傳感器對重量參數進行測量。兩路輸出數據之和服從高斯分布,將輸出數據之和按時序分為n個數據段,Xi表示第i個時間段的輸出數據。假設各個數據段同樣服從高斯分布,將每個數據段單獨看作一個數據源,同時看作對稱量結果的n個貝葉斯估計,如圖2所示。用pi(x)表示Xi的概率密度函數,xi和xj分別表示在一次測量中第i個和第j個時間段的輸出數據,即xi和xj分別為Xi和Xj的一個樣本。可得到:
式(1)中dij為xi對xj的置信距離,式(2)中dji為xj對xi的置信距離。由于Xi和Xj均服從高斯分布,可得到式(1)和式(2)中:

由上述可知,置信距離能夠反映稱重傳感器不同時段輸出數據之間的相互支持關系,如dij反映了i時段的輸出數據對j時段的輸出數據的支持程度,同樣dji反映了j時段的輸出數據對i時段的輸出數據的支持程度。dij的值可借助于誤差函數erf(θ)直接求得。誤差函數為

據文獻[7] 和文獻[8] 知:

兩種特殊情況,當xi=xj時,dij=dji=0;當xi>>xj或者xj>>xi時,dij=dji=1。
根據此方法可以得到兩路稱重傳感器中任意兩個時段輸出數據之間的置信距離,把這些值用矩陣的形式表示出來,即為不同時段輸出數據的置信距離矩陣。

1.2最佳融合數的選擇
通過上面的分析得到置信距離矩陣,然后需要選擇一個臨界值對置信距離進行劃分,借此判斷不同時段輸出數據之間是否支持。現以αi表示dij的臨界值,即當dij≥αi時認為第i個時間段的輸出不支持第j個時間段的輸出數據,而當dij≤αi時認為第i個時間段的輸出支持第j個時間段的輸出數據。在此定義一個二值變量βij表示第i個時間段是否支持第j個時間段的輸出數據,即:

由此得到一個關系矩陣[9]:

此關系矩陣表示任意兩個時間段輸出之間是否支持,由此可以判斷每個時間段輸出數據是否被認為有效。因此需要選擇另一個臨界值n,即對于某一個時間段數據輸出,當它被多于n個時間段數據輸出支持時認為其輸出數據有效。由此依據關系矩陣對各個時間段的輸出結果進行判斷,得到m個有效數據參與融合計算,而m個有效數據成為最佳融合數。
1.3基于貝葉斯估計的融合計算方法
貝葉斯估計充分利用了先驗知識,把每一次的檢驗過程動態看作對先驗知識的不斷修正。本文n個數據段中,最佳融合數位為m(m≤n)。貝葉斯公式為

為后續數據融合需要,將關系矩陣選擇的m個最佳融合集合表示為(x1,x2,…,xm)[10]。得到一組數據后,被測參數的條件概率密度函數可由式(11)表示:

若μ和Xk均服從高斯分布,即μ~(μ0,σ02),Xk~(μ,σk2),在這里令ω=p(
x,x
1
,…,x),可知ω是
12m與μ無關的常數。由此可得:
化簡后得到:

式(12)中的指數部分是關于μ的二次函數,故p(μ|x1,x2,…,xm)仍然服從高斯分布,設其服從N(μN,σN2),即:

因此,μ′即為μ的最優融合數據。
2 數據融合示例
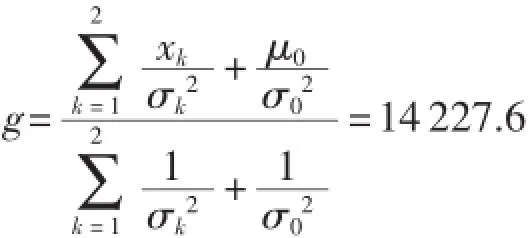
測得的一組質量數據,設其服從高斯分布,g~N(14003.96,59220.11)。實驗采用了兩軸貨車加載砝碼,在靜態情況稱得汽車前軸重量是5 193 kg,后軸重量是14 175 kg,本實例采用后軸,其測量誤差為1.21%。將這組數據按時序分為n=7段,假設各自服從高斯分布,獲得數據如表1所示。

表1 分時段后的數據
根據表1和本文論述的方法得出相應的置信距離矩陣:
D
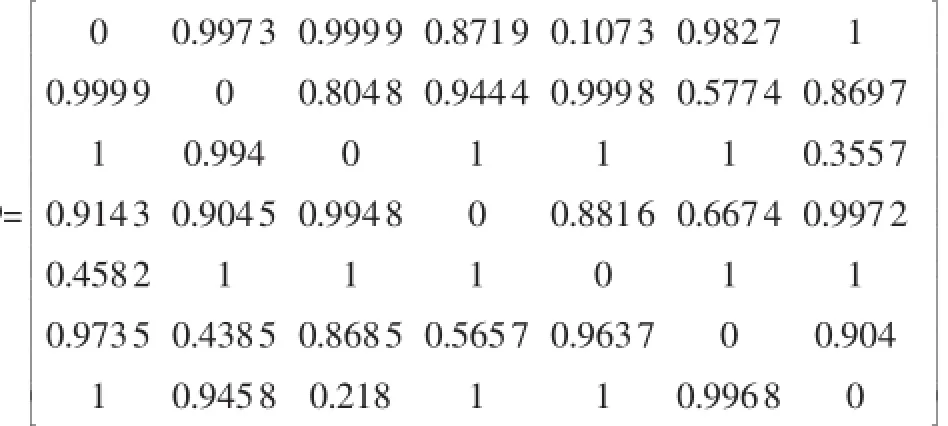
取dij的界線值為1,得到關系矩陣R:

取至少被另外6個時序段所支持的測量數據為有效數據,由R可知,最佳融合數m=2,融合集為{x2,x3},由式(14)可得出最終的融合結果:
融合后的誤差為0.37%,多次測量結果如表2所示。
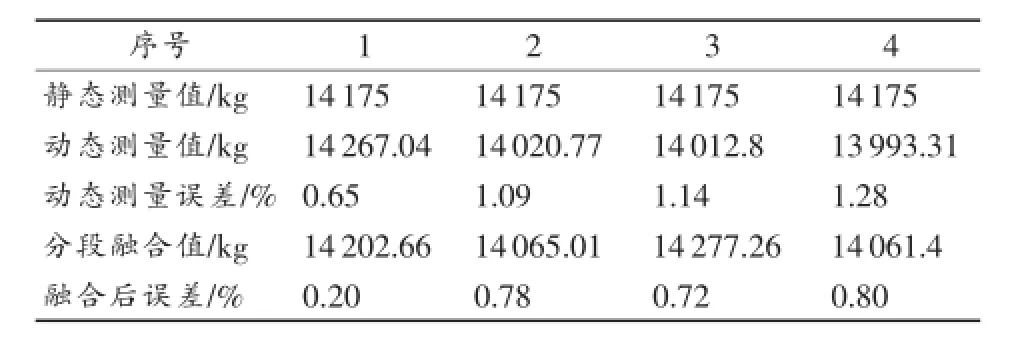
表2 多次測量結果
由以上仿真結果可以看出,對稱重數據進行貝葉斯估計后可以得到更加精確的稱重數據,選擇好最佳融合數,然后利用得到的置信距離矩陣進行貝葉斯估計可以很容易得到融合后的稱重數據。通過表2可以看出,貝葉斯估計的數據融合方法能夠使動態汽車衡的準確度更高。
3 結束語
實踐證明,這種融合方法方便簡單,減小了機動車通過秤時由于路面、秤體自身的振動及在加減速時的負荷變動等形成的動態振蕩會引入的稱重誤差,準確度有了大幅提高。
參考文獻
[1] 裴春清.基于深度濾波的動態汽車衡算法[J] .科技應用,2008,37(S0):7-9.
[2] 徐進.車輛動態稱重儀表的設計[D] .太原:太原理工大學,2010.
[3] Klein L A.多傳感器數據融合理論及應用[M] .2版.戴亞平,等譯.北京:北京理工大學出版社,2004.
[4] 韓旖旎.基于過采樣技術的動態汽車稱重儀的設計[D] .太原:太原理工大學,2010.
[5] 馬海平,李曉林.新型動態汽車衡稱重系統的設計與實現[J] .中國測試技術,2007,33(1):18-19,73.
[6] 吳小俊.基于Bayes估計的多傳感器數據融合方法研究[J] .系統工程理論與實踐,2000(7):45-48.
[7] 陳福增.多傳感器數據融合的數學方法[J] .數學的認識與實踐,1995(2):11-15.
[8] 阮沈勇.Matlab程序設計[M] .北京:北京航空航天大學出版社,2006.
[9] 禹春來,許化龍,黃世奇.基于關系矩陣的多傳感器數據融合方法[J] .航空計算技術,2005(1):23-26.
[10] 中山大學數學力學系.概率論及數理統計[M] .北京:高等教育出版社,1980.
Multi-period data fusion research of dynamic vehicle weighbridge based on Bayesian estimation
LI Li-hong,XU Wen-ju
(College of Information Engineering,Taiyuan University of Technology,Taiyuan 030024,China)
Abstract:Data fusion is a multi-level and multi-layered data process,whose main function is to detect,correlate,relate,estimate and assemble the data of multiple sources automatically. Based on the principle of dynamic vehicle weighbridge,the paper analyzed the output data of two road weighing sensors at different times,and proposed a theory of data fusion method based on Bayesian estimation. The experimental verification shows that the dynamic vehicle weighbridge error is small by using this method. It overcomes the dynamic truck scale caused by vehicle vibration,road surface roughness,the sensitivity of the sensor,the sensor dispersion linearity error and other factors on the weighing results with high accuracy.
Key words:data fusion;dynamic vehicle weighbridge;Bayesian estimation;auto detect
收稿日期:2013-03-12;收到修改稿日期:2013-05-10
doi:10.11857/j.issn.1674-5124.2013.05.029
文章編號:1674-5124(2013)05-0107-03
文獻標志碼:A
中圖分類號:U492.3+21;TP212.1+2;TP274;O212.8
作者簡介:李麗宏(1963-),男,山西晉城市人,副教授,研究領域為控制理論與控制工程,檢測技術與智能儀表。
