改進的hp自適應網格細化算法及應用
2013-12-25 08:48:36王麗英張友安趙國榮
彈道學報 2013年1期
關鍵詞:優化
王麗英,張友安,趙國榮
(海軍航空工程學院1.系統科學與數學研究所;2.控制工程系,山東 煙臺264001)
近年來,偽譜法(p法)和網格細化法(h法)在求解非線性最優控制問題的數值解上得到了廣泛的應用[1-3]。文獻[1]提出了一種p法網格細化策略,缺點是要提前獲知不連續點和奇點個數及位置。文獻[2-3]分別提出了一種基于多分辨率的自適應h法軌跡優化算法和基于密度函數的網格點分布算法,優點是可以較好地捕捉狀態變量、控制變量的不連續性和高階非平滑性;缺點是計算效率低。起源于有限元法的自適應hp法,結合了p法和h法的優點,在流體力學和偏微分方程的求解中得到廣泛應用[4-7]。為同時提高偽譜法求解非線性最優控制問題的精度和計算效率,文獻[8]將hp思想引入最優控制問題的求解中,提出了hp自適應偽譜法,在實施過程中忽略了軌跡的平滑性;文獻[9-10]則給出了一種變階自適應偽譜法,以軌跡的曲率作為改進精度方式的標準,相比文獻[8],該算法考慮了軌跡的平滑性,但在執行h法細化時,是根據軌跡曲率密度函數定義新增網格點的個數和位置,對于無約束或約束較少的情況,該算法很實用,但對于多約束條件下的復雜優化問題來說,卻要耗費大量的優化時間。
本文在文獻[8-9]的基礎上,基于Radau偽譜法給出了一種改進的hp自適應網格細化算法。以高超再入飛行器軌跡優化為例,將該算法和全局偽譜法及局部偽譜法在解的精度、優化計算時間、迭代次數等方面進行了比較,結果表明hp自適應網格細化算法能以較少的計算代價得到較高精度的解。
1 多區間軌跡優化問題闡述
多約束條件下的軌跡優化問題可描述為下列非線性最優控制問題:定義狀態-控制變量,使Bolza型代價函數最小化:

滿足約束條件:
多區間非線性最優控制問題是指將問題(1)、問題(2)的時間區間[t0,tf]劃分為K個子區間,用t0<t1<…<tK=tf表示K+1個網點,Nk(k=1,…,K-1)表示第k個子區間[tk-1,tk]內的配點數(這里,定義網點為相鄰區間的連接點;配點為單個區間內的節點;整個區間的節點數等于網點數與配點數之和)。進行下述時域變換:

將時間t∈[tk-1,tk]轉變成τ∈[-1,+1]。
對于轉換后的多區間最優控制問題,采用hp-LGR偽譜法作為基本的離散化方法,將其轉化為非線性規劃問題,具體步驟參見文獻[10]。
2 改進的hp自適應網格細化算法
2.1 誤差評估準則
在數值求解過程中,一般不能得到原連續時間最優控制問題的確切解,但若給出的數值求解方法能夠精確地近似原問題,則微分-代數約束方程應該在任意點上被滿足。因此,以微分-代數約束方程在配點間的滿足程度作為解的近似誤差評估準則。
取相鄰配點間等間距分布的3個點作為誤差評估準則的采樣點,即

為敘述方便,將[tk-1,tk]內的采樣點定義為,于是微分-代數約束方程在采樣點上的殘差表示為
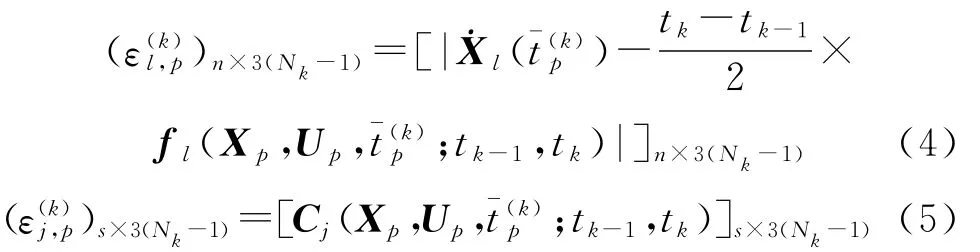
式中:l=1,…,n,表示狀態變量的個數;j=1,…,s,表示路徑約束的個數;p=1,…,3(Nk-1),表示采樣點表示第l個狀態在第p個采樣點處的殘差絕對值表示第j個路徑約束在第p個采樣點處的殘差。式(4)表示動態約束殘差矩陣;式(5)表示路徑約束殘差矩陣。對于路徑約束來說,當式(5)中的元素全為負值時,表示滿足設定的要求;當存在大于零的元素時,則表示不能滿足設定的要求。
設ε為給定的誤差門限值。于是,當式(4)中的所有元素都小于設定的ε且式(5)中的元素全為負值時,認為達到求解精度要求;反之則需要進一步提高求解精度。下面以第k個子區間[tk-1,tk]為例,具體介紹改進求解精度要求的措施。
2.2 提高求解精度的策略
2.2.1 路徑約束殘差起主要作用
2.2.2 動態約束殘差起主要作用
令(xl,p)n×3(Nk-1)表示n個狀態變量在p個采樣點上的離散值所構成的狀態矩陣,為矩陣(xl,p)n×3(Nk-1)中相應 于最大 殘差的狀態所在的行向量,即,則第l個狀態在第p個采樣點處的曲率為

設表示曲率的算術平均值,即

令

若式(6)中的每個元素都比ρ小(ρ為一設定值),則認為該區間內的曲率具有一致形式,此時,通過增加區間內插值多項式的維數來提高求解精度。設表示區間[tk-1,tk]在第i次迭代時的配點數,表示第i+1次迭代時的配點總數,N(+)表示新增加的配點數,則

若式(6)中存在比ρ大的元素,則認為該區間內存在一個(或多個)較大的曲率,即軌跡相對來說是非平滑的,此時,需要將該區間作進一步的細化以提高求解精度。
①確定新網點的位置。
取式(6)中元素的局部最大值對應的采樣點作為新增加的網點。
②確定新增加區間內配點的個數。
與2.2.1節相同,在每個新增加的區間內設定N(0)個配點。
2.3 算法具體步驟
具體算法步驟總結如下。
①初始化。給定誤差門限值ε和初始狀態x0;選取K個子區間,每個區間內設定N(0)個配點。
②在給定的狀態估計值和節點分布下求解NLP,若所有區間的<ε,則停止迭代,若存在某個ε,則繼續③;
④在路徑約束的殘差最大處進行網格細化,令N(0)為新增區間內的配點數,轉⑥;
⑤若式(6)具有一致形式,則增加該區間內的配點數,如式(7)所示;若式(6)具有非一致形式,則進行網格細化,取式(6)中元素的局部最大值對應的采樣點作為新增的網點位置,在每個新增加的區間內設定N(0)個配點;
⑥在所有的網格區間都被更新后,返回②。
3 應用實例
下面以再入飛行器軌跡優化問題為例,對本文算法進行驗證。
3.1 再入軌跡優化問題
再入軌跡優化的數學模型,即詳細的3-D運動方程參見文獻[11]。同時將升力參數CL和阻力參數CD表示為攻角α和馬赫數的函數[11]:

為限制執行機構的變化速率,令=u1,=u2,于是將3-D運動方程改寫為向量形式的8狀態運動方程,其狀態空間X1和控制空間U1定義如下:

式中:r0為飛行器距地心的距離;θ,φ分別為經度、緯度;v為飛行速度;γ,ψ,α,σ分別為飛行路徑角、航向角、攻角、傾側角;u1,u2分別為攻角變化率、傾側角變化率。
以再入航程最大為優化目標,即J=-φ(tf),其中,tf為末端時刻。同時考慮以下的約束條件:
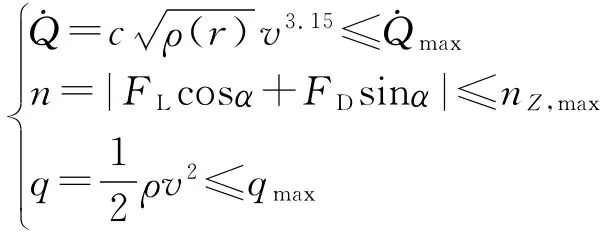
式中:FL為升力,FD為阻力;c=34 882.985 5,為常數=2 453kW/m2;nZ,max=4,qmax=335.2kPa。
②終端條件約束。

3.2 仿真分析
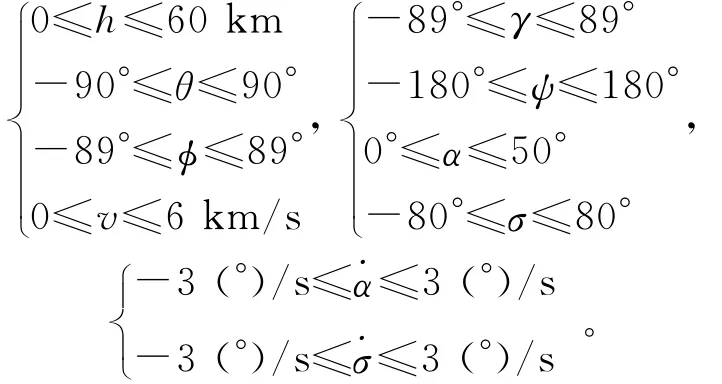
仿真中狀態變量、控制變量的邊界限制如下:
仿真中涉及到的各種參數設置見表1。
取N(0)=2,N(+)=5,ρ=2;N0,Nc分別表示不同算法初始化時選取的區間個數和每個區間內的配點數。為簡化表達形式,以下表述中的p代表全局Radau偽譜法;h代表分段Radau偽譜法;hp代表改進的自適應 hp-Radau偽譜法。E,tc,Cpt,MI,IT,OF分別表示優化結束時的最大微分-代數約束的近似誤差、優化計算時間、優化結束時的配點個數、網格區間個數、迭代次數和目標函數值。整個求解過程是在普通PC機上進行的,其中,CPU為1.73G/Pentimu Dual,內存為DDR 1.0G,操作系統為Windows XP,編程環境為 Matlab R2009a。
表2給出了3種偽譜方法在不同精度要求下的最大近似誤差、優化時間、優化結束時所需的配點總數、子區間個數、迭代次數及代價函數絕對值間的比較結果,從中可得到以下結論:①不同精度標準下,p法在優化過程中得到的微分-代數約束誤差均最大;②10-3和10-4的精度要求下,h法和hp法在優化速度、求解精度上相差不大,相對來說hp法的計算精度最高;③隨著精度要求的提高(10-5),優化所需的配點總數、子區間的個數、迭代次數均逐漸增多,相應地也導致了優化時間的增長,符合偽譜法求解最優控制問題的特點。同時可以看出,hp法在求解精度和優化時間上最具優勢。

表1 仿真參數設置
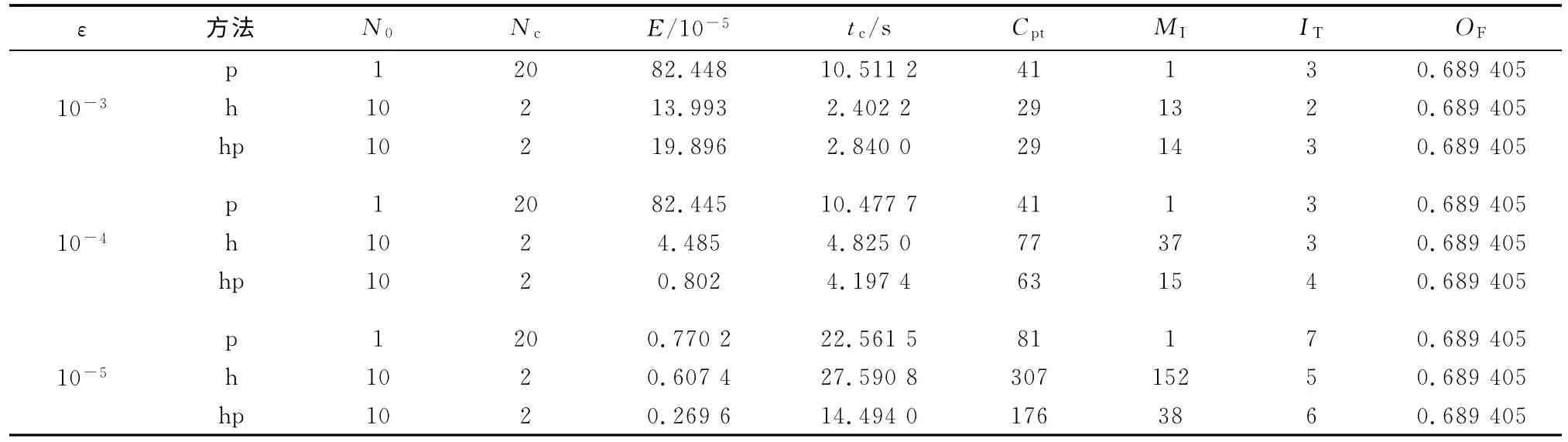
表2 不同偽譜方法的優化結果比較
圖1給出了10-4精度下不同偽譜法的節點分布特點(圖中縱坐標無實際物理意義,僅為圖示方便,將采用不同方法優化得到的節點分別投影于y=1,y=2和y=3所代表的3條直線上),從圖中可以看出:①p法采用的是一個區間,通過增加區間內節點個數提高求解精度要求,保持了偽譜法節點兩端密、中間疏的分布特點;②h法通過細化子區間的方式提高求解精度要求,所有子區間內的配點數是相同的,可看出每3個點構成一個區間;③hp法的節點分布明顯不同于其它2種偽譜方法,不具備統一節點分布標準。
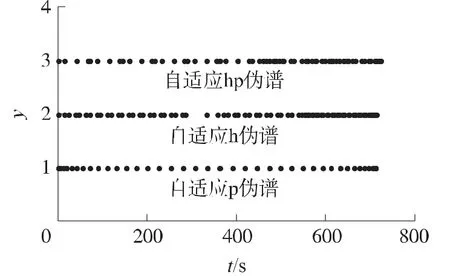
圖1 不同偽譜法的節點分布
上述分析過程表明:hp法與其他2種優化方法相比,能夠以較少的計算代價得到較高精度的解。
圖2、圖3分別給出了本文算法與文獻[8-9]中的算法在求解3.1節軌跡優化問題中得到的部分狀態軌跡和路徑約束變化曲線;3種hp算法優化求解過程所需的優化時間、節點總數及迭代次數間的比較結果如表3所示。
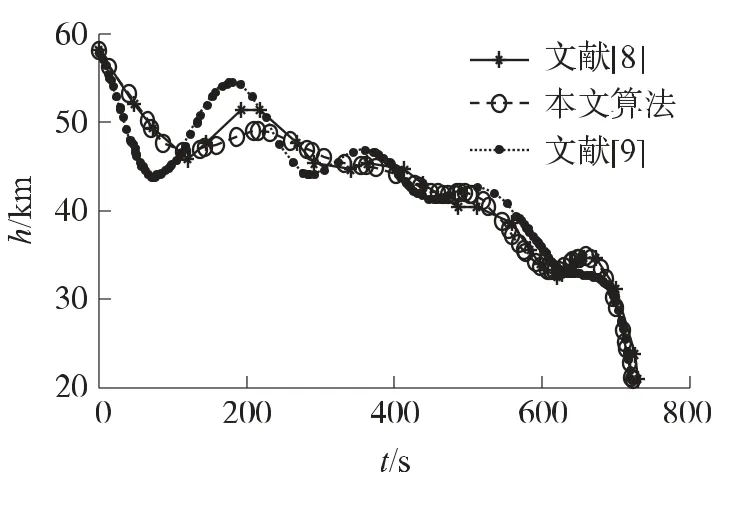
圖2 高度變化曲線
取誤差門限值ε=10-4,由圖可以看出,從最優軌跡的平滑性上考慮,文獻[9]的算法最好,其次是本文算法,文獻[8]最差;而由表3則可看出,文獻[9]所需的優化時間最長。由于研究目的是實現再入軌跡的快速優化,因此,綜合衡量軌跡精度和優化時間,本文所給算法結合了文獻[8]和文獻[9]的優點,更適合快速求解高超飛行器的再入軌跡優化問題。
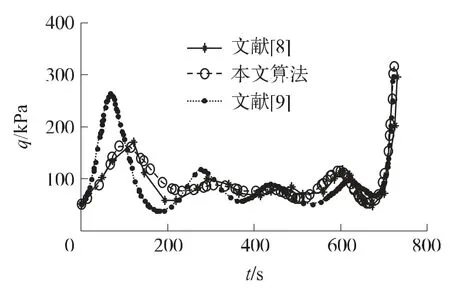
圖3 動壓變化曲線
圖4和圖5分別為優化得到的最優控制信號及其隨時間的變化速率曲線。結合兩圖可以看出:①優化過程中控制變量的大小及變化速率均在要求的設定范圍內;②攻角大部分時間保持在15°~20°之間,即保持大攻角飛行,最大程度地減少熱載的作用,符合高超熱防護的需求。優化得到的三維最優軌跡如圖6所示。
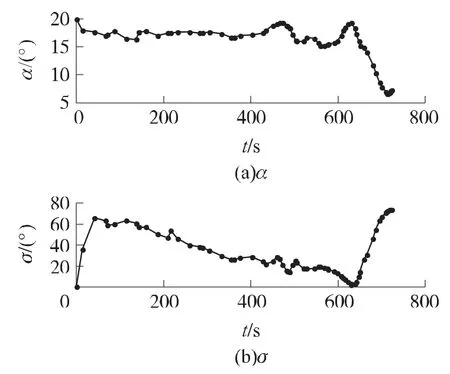
圖4 控制信號
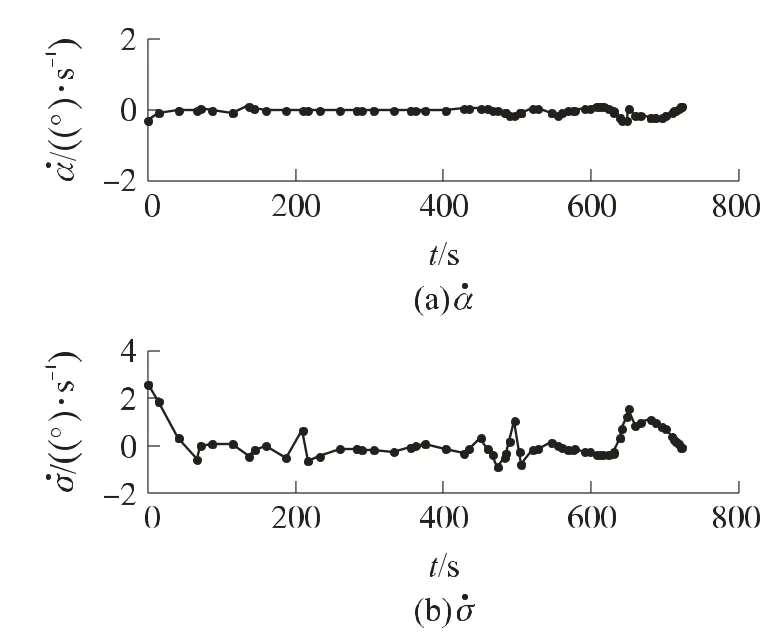
圖5 控制信號變化率

圖6 三維最優軌跡
為分析hp-LGR偽譜法計算最優軌跡的精度,將計算得到的最優控制信號帶入原微分方程,用Matlab中的ode45命令進行數值積分,狀態變量的積分軌跡與最優軌跡間的誤差曲線如圖7,可以看出兩者間的誤差較小;表4為末端狀態變量實際值與期望值間的比較結果,從中可以看出終端約束均得到滿足,期望的落點位置與實際位置間的誤差很小,表明了hp-LGR偽譜法具有較高的求解精度。
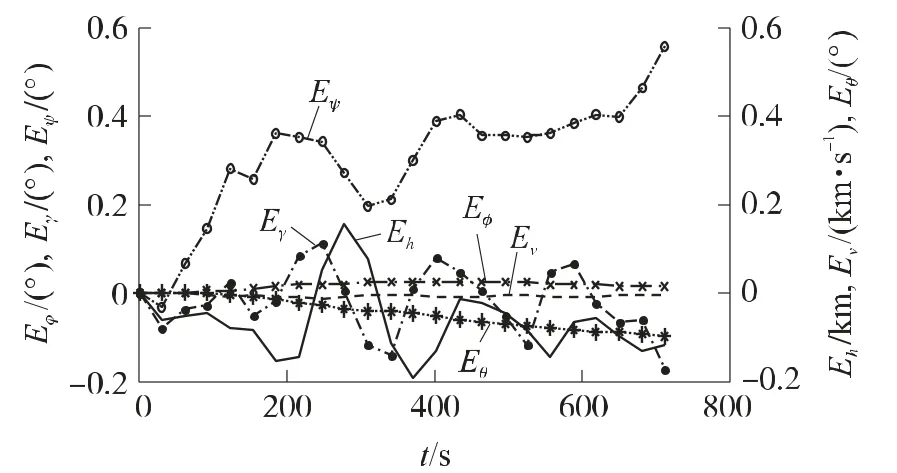
圖7 誤差曲線

表4 末端狀態誤差
圖8為路徑約束隨時間變化曲線,從圖中可以看出:熱流密度、動壓和過載約束均在設定的范圍內;且熱流密度的峰值出現在再入初期,隨著高度的降低、大氣密度的增大,熱流密度逐漸減小,動壓和過載則逐漸變大,符合高超再入軌跡的特點。
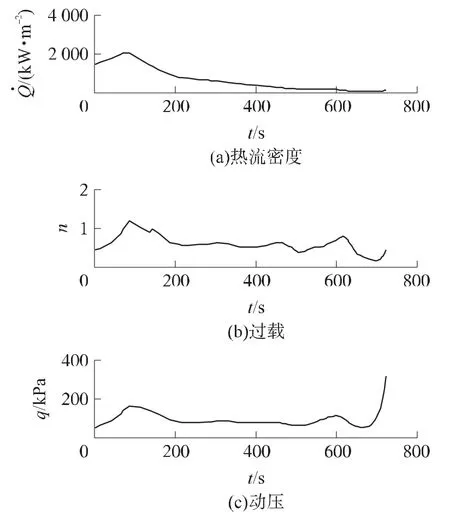
圖8 路徑約束隨時間變化曲線
4 結論
基于hp-LGR偽譜法給出了一種求解非線性最優控制問題的hp自適應網格細化算法,通過增加插值多項式維數或細化網格的方式提高解的精度,優化結束時的微分-代數約束最大誤差為0.0802×10-4,滿足設定的精度要求,優化時間為4.197 4s。仿真結果表明:
①與全局偽譜法和局部偽譜法相比,hp偽譜法充分結合了p法的快速收斂性和h法的計算稀疏性,能夠以較少的計算代價得到較高精度的解;
②與已有hp算法相比,本文方法更適合求解多約束條件下軌跡優化問題,具有實時應用的潛力,可作為實時制導的基礎。
[1]ROSS I M,FAHROO F.Pseudospectral knotting methods for solving optimal control problems[J].Journal of Guidance,Control,and Dynamics,2004,27(3):397-405.
[2]JAIN D,TSIOTRAS P.Trajectory optimization using multiresolution techniques[J].Journal of Guidance,Control,and Dynamics,2008,31(5):1 424-1 436.
[3]ZHAO Y P,TSIOTRAS A.Density-function based mesh refinement algorithm for solving optimal control problems[C]//Infotech and Aerospace Conference.Seattle,Washington:AIAA,2009.
[4]GUI W,BABUSKA I.The h,p,and hp versions of the finite element method in 1dimension.Part I:the error analysis of the p version[J].Numerische Mathematik,1986,49:577-612.
[5]GUI W,BABUSKA I.The h,p,and hp versions of the finite element method in 1dimension.Part II:the error analysis of the h and h-p versions[J].Numerische Mathematik,1986,49:613-657.
[6]GUI W,BABUSKA I.The h,p,and hp versions of the finite element method in 1dimension.Part III:the adaptive h-p version[J].Numerische Mathematik,1986,49:659-683.
[7]GALVAO A,GERRITSMA M,MAERSCHALK B D.Hp-adaptive least-squares spectral element method for hyperbolic partial differential equations[J].Journal of Computational and Applied Mathematics,2008,215(2):409-418.
[8]DARBY C L,HAGER W W,ANIL V R.An hp-adaptive pseudospectral method for solving optimal control problems[J].Optimal control applications and methods,2011,32(4):476-502.
[9]DARBY C L,HAGER W W,ANIL V R.A preliminary analysis of a variable-order approach to solving optiaml control problems using pseudospectral methods[C]//AIAA/AAS Astrodynamics Specialist Conference.Toronto, Canada:AIAA,2010.
[10]DARBY C L,HAGER W W,ANIL V R.Direct trajectory optimization using a variable low-order adaptive pseudospectral method[J].Journal of Spacecraft and Rockets,2011,48(3):433-445.
[11]BETTS J T.Practical methods for optimal control and estimation using nonlinear programming[M].Washington:Society for Industrial and Applied Mathematics,2010.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
