一種觀測我國海岸線和近海的小衛星編隊飛行方案
2013-12-29 04:13:54林來興
航天器工程 2013年1期
林來興
(北京控制工程研究所,北京 100190)
1 引言
我國已成功發射了3顆海洋衛星,今后8年還計劃發射8顆海洋衛星。無論是陸地衛星,還是海洋衛星,其重訪時間(對同一地點進行觀測的時間間隔)都是幾天,最短也只有一天[1]。這僅能應對一般正常情況,但是對突發事件,例如自然災害、地震、海嘯 油污等 以及政治軍事需要 特別是當前我國海域和某些島嶼主權受到侵犯時,則需要重訪時間為幾小時的空間遙感衛星。
本文計劃釆用小衛星(4~6顆),沿航向編隊飛行組成一個條帶,對我國海岸線和近海(渤海、黃海、東海、南海)進行觀測,其重訪時間為4~6小時,重訪時間可均勻分布,也可以任意根據需要設置為非均勻分布。衛星數量增加,重訪時間縮短。
除此以外,本文還討論了對海岸線、海域和陸地(近海島嶼)的各種觀測的時間、空間和光譜的分辨率要求,這對海洋衛星總體設計與遙感器選取都是重要的設計依據。
現代小衛星成本低、重量輕、研制周期短,其技術性能完全可以滿足要求[2]。采用此小衛星編隊飛行方案,對我國近海和海岸線500多萬平方千米面積的區域,每相隔幾小時就能觀測一次。若有需要,對關鍵地區可采用無人機進行更詳細、更精確的觀測。目前無人機先進遙感器成像分辨率為幾厘米,續航時間幾十小時[3]。衛星和無人機結合起來完全能滿足所有突發事件的觀測需求。
本文提供的是一個新方案設想,若采用這種1天回歸軌道衛星沿航向編隊飛行的方法,則對其他地區同樣可以提高觀測時間分辨率(縮短重訪時間),具有普遍的應用意義。
2 對陸地與海洋觀測的時間和空間分辨率要求
對空間遙感要求有4個關鍵技術指標:空間分辨率、光譜分辨率、輻射分辨率和時間分辨率。
空間分辨率指像素所代表的地面范圍的大小,即掃描儀的瞬時視場,或是地面物體能分辨的最小單元。光譜分辨率是指遙感器在接收目標輻射的光譜時能分辨的最小波長間隔,間隔越小,分辨率越高。輻射分辨率是指遙感器接收波譜信號時,能分辨的最小輻射度差。時間分辨率指對同一地點進行遙感采樣的時間間隔,即采樣的時間頻率,也稱重訪時間。
圖1表示空間遙感在不同應用領域對空間分辨率和光譜分辨率的要求[4]。
圖2表示空間遙感在不同應用領域對空間分辨率和時間分辨率的要求[5]。空間分辨率要求從千米到幾厘米不等,這是一個相當巨大的差異。時間分辨率(重訪時間)從不到1小時到10年不等。
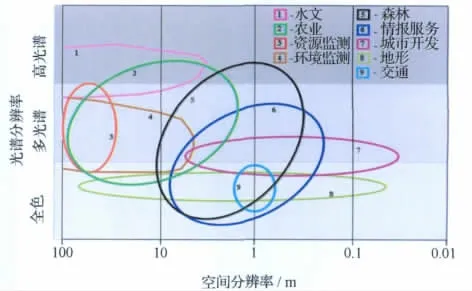
圖1 對地觀測空間分辨率和光譜分辨率的要求Fig.1 Earth observation requirements:spatial resolution and spectral resolution
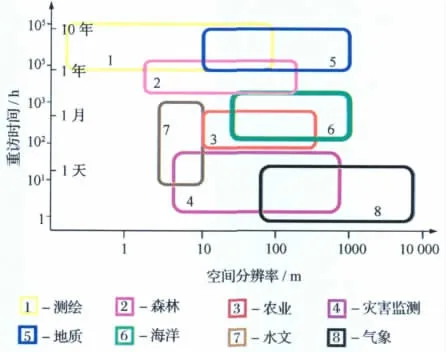
圖2 對陸地與海洋觀測空間分辨率和時間分辨率的要求Fig.2 Earth observation requirements:spatial resolution and revisit time
通過對圖1分析得知:多光譜的空間分辨率要求達到優于10cm,例如對城市開發需求,目前空間遙感器還存在一定困難。用于情報服務等的全色、多光譜的空間分辨率優于1m,目前空間遙感器基本可以滿足。除此以外,目前全世界絕大部分空間遙感器都可以滿足圖2所示的任務要求[6]。
雖然有的空間分辨率要求幾厘米,例如測繪和地形觀測,但是時間分辨率很低。這可以通過多次觀測,不斷提升時間分辨率,以滿足任務要求。關于時間分辨率要求半小時或幾小時,可通過星座或編隊飛行來解決。
關于空間分辨率要求幾厘米的觀測,一方面可通過開發高分辨率遙感器,另一方面可通過降低衛星軌道高度來實現。
3 對海岸線和近海觀測的時間與空間分辨率要求
陸地與海洋交接線,稱為海岸線,由彼此相互強烈影響的近岸海域和濱海陸地組成,實際是一條海岸帶。海岸帶是地球四大圈層(水圈、巖石圈、大氣圈和生物圈)共同作用,相互影響的地帶。
全世界海岸線長約44萬千米,我國海岸線長達1.8萬千米,加上島嶼海岸線為1.4 萬千米,共約3.2萬千米;在漫長的海岸帶蘊藏豐富的礦產、生物、能源、土地等自然資源。它不僅是國防前哨,而且是海陸交通的樞紐和經濟發展的重要基地,為此對海岸線觀測十分重要。
我國近海包括渤海、黃海、東海和南海。近海東西橫跨25°經度,南北縱貫40°緯度,近海總面積為470多萬平方千米。
不同觀測任務對海岸線空間遙感的空間和時間分辨率要求如圖3所示[7]。圖3中包括人們對海岸線環境所關注的主要內容,不同應用領域對空間分辨率要求由1米到幾千米,這種要求目前空間遙感器全部可以滿足[6]。但是時間分辨率從半小時到幾年,此跨度很大,關鍵是半小時到十幾小時的時間分辨率,特別是某些需要長期觀測的任務,需要專門研究,提出具體的實施方案。
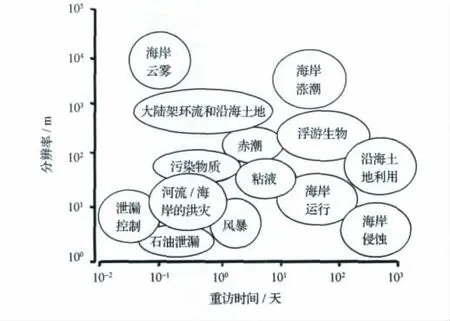
圖3 不同觀測任務對海岸線空間遙感的空間分辨率和時間分辨率要求Fig.3 Spatial and time resolution requirements for coastal studies
對近海空間遙感的空間分辨率和時間分辨率要求比較復雜,因為近海除了海域以外,還有大量島嶼,我國大小島嶼共有5500 多個,最大臺灣島約3.6萬平方千米 其次海南島約3.2萬平方千米 就是我們關注的釣魚島陸地面積也有6.3平方千米。為此,對它們空間遙感的空間分辨率和時間分辨率需要有一個系統和全面的要求。
4 編隊飛行的軌道設計要求
海洋觀測的軌道設計是總體任務分析的重要內容,必須符合總任務的需求。例如,任務需要多顆衛星在同一時間對同一區域觀測;多顆衛星輪流對指定的同一地區實施連續觀測,如每天觀測1次、2次……;從目標分辨率和視場分析,觀察期間衛星的高度范圍;觀察期間,地面的光照條件要求等。
針對不同任務設計不同軌道:單星軌道,多星組網,衛星編隊。其中編隊還有多種方式。比較常用的有:串聯編隊飛行(兩星前后同一個軌道飛行)、沿航向編隊飛行(不同時間覆蓋同一個地區)、繞飛編隊飛行(在同一個軌道平面飛行,隊形為橢圓形)、空間圓形編隊飛行、星下點圓形編隊飛行等[8-9]。
軌道設計步驟:被觀察區域的確定;軌道高度范圍確定;軌道參數的選擇確定;進入工作飛行程序;發射窗口確定;軌道特性維持等。本文僅就我國東海、南海實施多顆衛星1天內輪番觀測為例,說明軌道參數選擇方法。不失為一般性假設,被觀測區域:北緯0°~55°,東經105°~132°。
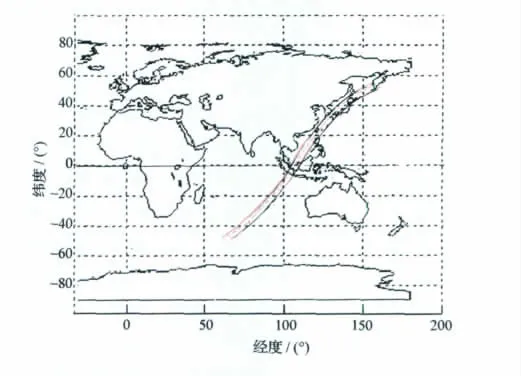
圖4 海岸線和近海遙感器覆蓋星下點軌跡(示意圖)Fig.4 Satellite ground track of coastline and near sea remote sensor coverage(schematic)
4.1 軌道傾角的選擇
衛星星下點能夠達到的最高緯度是其軌道傾角。
方案A:傾角為90°~99°。這里先考慮傾角為90°的情況 如圖5所示 小衛星遙感器覆蓋星下點軌跡由紅線表示,觀測圖升交點為東經115°(可以推導出相應升交點赤經)。
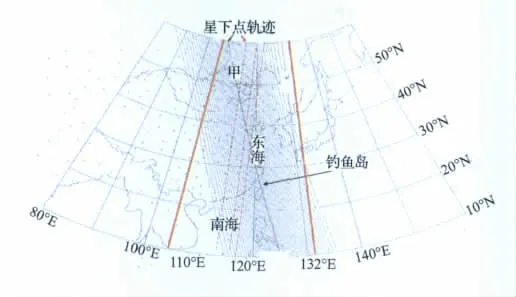
圖5 方案A 星下點軌跡Fig.5 Satellite ground track of scheme A
此方案特點:覆蓋我國大部分海岸線和近海海域,且對全球南北兩極可一天多次觀測。這對了解南北兩極動態變化與全球海洋和氣候變化均有很大幫助,但要求遙感器具有較大視場,覆蓋寬度為1500多千米,一般寬視場的遙感器還需要左右側擺。選擇適當的周期可能每天有兩次經過預定區域,一次從南向北,一次從北向南,這有利于選擇太陽同步軌道。
方案B:傾角選為55°~60°,觀測圖升交點為東經105°~110°。圖6中紅線表示第1顆小衛星傾角為60°,升交點為東經110°的星下點軌跡。此方案特點:可通過調整升交點赤經、選擇軌道傾角,達到需要覆蓋的面積最大。
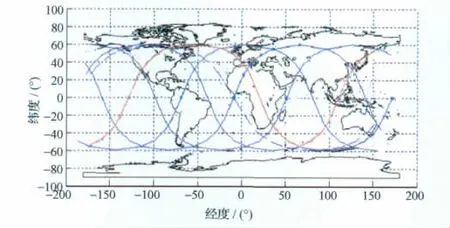
圖6 由6顆小衛星組成星下點軌跡Fig.6 Satellite ground tracks of six small satellites
上述兩方案比較結果:A 方案需要遙感器視場較大,而且還要左右側擺,從而降低了左右兩側的成像分辨率,并增加了遙感器結構復雜性;B方案遙感器的視場用普通海洋衛星遙感器都能滿足,而且其能夠覆蓋的面積與需要覆蓋的面積比較吻合,因此B方案較好。
4.2 回歸軌道參數
為了滿足每天都要經過預定區域的要求,一般選擇回歸軌道,回歸周期為1天。對于近圓形軌道,回歸軌道的半長軸和高度如表1所示。
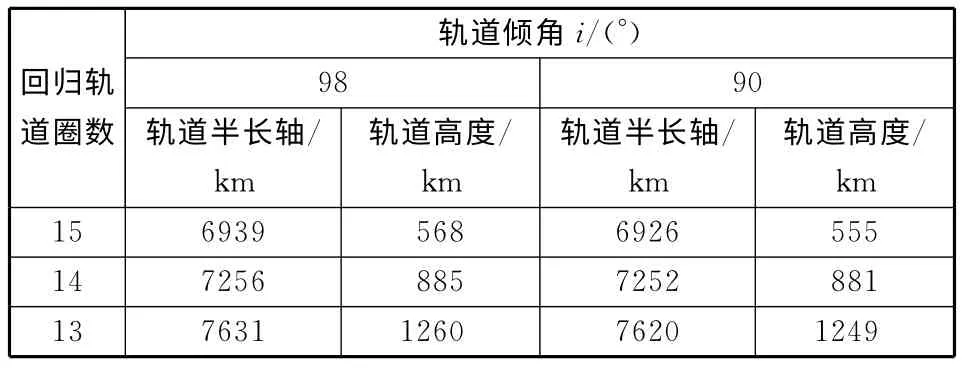
表1 近圓形軌道的半長軸和高度Table 1 Semi-major axis and height of near circular orbit
回歸軌道的特點是1天以后星下點軌跡重復。為了有一圈經過預定區域,需要進行工作軌道捕獲控制,即調整軌道周期,到達一定的升交點地理經度時進入表中規定的半長軸。
4.3 衛星組網
當一天一次經過指定海域不能滿足任務需要時,可以通過多顆衛星組網實現。多顆衛星有相同的星下點軌跡,以不同時間(相隔時間為重訪時間)覆蓋同一個地區。也就是說,它們升交點赤經不相同,升交點赤經之差(ΔΩ)是用來補償地球自轉引起星下點軌跡的變化;ΔΩ=tω,其中t為通過升交點的時間差(也稱重訪時間),ω為地球自轉角速度,而其他軌道根數完全相同。均勻分布升交點赤經,每顆衛星可以以相同的重訪時間,相繼觀測指定區域[10]。例如2 顆衛星組網,每天2 次經過指定區域,間隔約12h;3顆衛星組網,每天3次經過指定區域,間隔8h,……,它們的升交點赤經差分別為180°,120°,……。
5 結束語
本文主要提出了一個針對敏感區域或者關鍵地域的空間遙感設計方案,采用方法為小衛星沿航向編隊飛行。相隔幾小時就可以對敏感區域或者關鍵地域普查一次;若發現疑點,則采用無人機進行詳查,兩者結合起來,完全能滿足所有突發事件觀測的要求。當采用4顆小衛星組網,則重訪時間為6h。
(References)
[1]楊保華.建構中國海洋衛星體系提升海洋環境與災害監測能力[J].中國空間科學技術,2011,31(5):1-8
Yang Baohua.Constructing China’s ocean satellite sys-tem to enhance the capability of ocean environment and disaster monitoring[J].Chinese Space Science and Technology,2011,31(5):1-8(in Chinese)
[2]Mercier M,Roser X,Terrenoire P.Toward small earth observation constellation for environment,security and defence[C]//10th 4SSymposium,Paris:CNES,2012
[3]徐毅,羅君.無人機——未來戰場的主力武器[J].電子科學技術評論,2005(5):1-6
Xu Yi,Luo Jun.UAV—the main weapon of the future battlefield[J].Review of Electronic Science and Technology,2005(5):1-6(in Chinese)
[4]Elachi C.Introduction to the physics and techniques of remote sensing[M].Hoboken:John Wiley & Sons,1987
[5]Konecny G.Geoinformation-remote sensing,photogrammetry and geographic information systems[M].London:Taylor &Francis,2003
[6]林來興.小衛星高分辨率成像系統[J].上海航天,2011,28(6):54-57
Lin Laixing.High-resolution imaging system of small satellite[J].Aerospace Shanghai,2011,28(6):54-57(in Chinese)
[7]Rainer S.Satellite earth observation and surveillance payloads,RTO-EN-SCI-209[R].Stuttgart:German Aerospace Center,2008
[8]Leitner J A.Spacecraft formation flying-an overview of mission and technology challenges,AAS 07-031[R].Washington D.C.:AAS,2007
[9]林來興,車汝才.航天器編隊飛行軌道構型研究[J].航天器工程,2009,18(1):21-29
Lin Laixing,Che Rucai.Study on orbital configuration for spacecraft formation flying[J].Spacecraft Engineering,2009,18(1):21-29(in Chinese)
[10]Sabol C,Burns R,Craig A.Mclaughin satellite formation flying design and evolution[J].Journal of Spacecraft and Rockets V,2001(2):11
