變速恒頻風力發電用雙PWM變換器的協調控制
2013-12-29 10:32:40孟彥京李林濤張曉娟陳景文
電子器件 2013年5期
孟彥京,李林濤,張曉娟,陳景文
(陜西科技大學電氣與信息工程學院,西安710021)
風力發電是可再生能源中最廉價、最有希望的能源,并且是一種不污染環境的“綠色能源”[1]。而風力發電中的變速恒頻控制技術和雙PWM(Pulse Width Modulation)變換技術是目前比較先進的發電控制技術。雙饋發電機變速恒頻風力發電方案是通過在雙饋電機的轉子側施加三相交流電進行勵磁,調節勵磁電流的幅值、頻率和相位,實現定子側輸出恒頻恒壓;由于采用了矢量控制技術,實現了有功、無功功率的獨立調節,從而改善風電機組和所并電網的動態和靜態特性。
目前,國內外相關文獻主要集中研究并網后基于定子磁場定向雙饋電機有功功率和無功功率的解耦控制,而對并網前定子電壓控制的研究很少,因此研究并網前的雙PWM控制技術有著非常重要的意義。
本文分析了風力機的運行特性及最大風能捕獲運行原理,建立了雙饋異步發電機和雙PWM變換器在不同坐標下的模型。然后研究了雙PWM變換器的控制策略,控制采用定向矢量變換控制技術,對發電機轉子側進行交流勵磁,從而實現最大風能捕獲的高效發電運行,并綜合矢量控制技術對整個發電系統進行建模仿真。結果表明此策略實現了風力發電機的變速恒頻運行,另外在定子電流變化的同時,保持了恒定的功率因數,實現了對雙饋感應電機的有功功率和無功功率的獨立控制,控制效果良好。
1 雙饋發電機的原理及模型分析
1.1 雙饋發電機結構特點及等效電路
交流勵磁雙饋發電機定子接入電網,轉子繞組由頻率、相位、幅值可調的電源供給三相低頻勵磁電流,在轉子中形成一個低速旋轉的磁場,這個磁場轉速與轉子的機械轉速相加等于定子磁場同步速,從而在發電機定子繞組中感應出同步轉速的工頻電壓[2]。風速變化時轉速隨之變化,以達到變速恒頻的目的。當轉子處于亞同步時,Ps>0,轉子從變頻電源輸入功率;當轉子處于超同步時,Ps<0,轉子向變頻電源輸出功率。無論哪種情況,輸入機械功率總要克服電磁轉矩做功,同時向定子傳遞功率[3]。其等效電路與時空矢量圖如圖1、圖2所示。
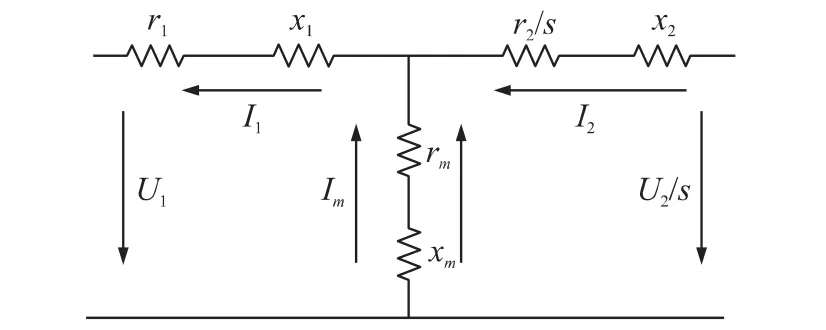
圖1 等效電路圖
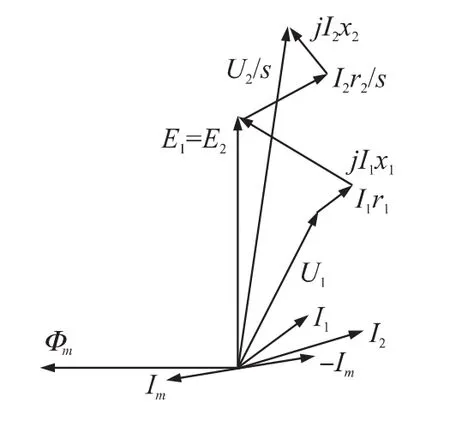
圖2 相量圖
1.2 雙饋發電機的功率關系及數學模型
首先是風力機吸收風能產生機械轉矩,然后通過傳動裝置帶動發電機轉子轉動,從而將機械功率傳遞給發電機;轉子繞組本身接入勵磁電流建立磁場,由于轉子的轉動,在定子繞組中感應出電流,功率就這樣通過磁場傳遞到定子側。
電磁功率Pem是由雙饋電機軸上輸入的凈機械功率Pem與轉子繞組輸入的有功功率P2一起,在扣除轉子銅耗Pcu2之后建立的,即:

式中,s為轉差率。
電磁功率Pem傳遞到定子側后,又有一部分消耗在定子繞組銅耗Pcu1,和電機鐵耗PFe上。雙饋發電機通過定子輸出的有功功率,也就是一般意義上的發電功率。即:

一般情況下,雙饋發電機的數學模型由電壓方程、磁鏈方程、轉矩方程和運動方程組成。圖3所示為雙饋電機的物理模型[4]。定子三相繞組軸線A、B、C在空間是固定的,以A軸為參考坐標軸,轉子繞組軸線a、b、c隨轉子旋轉,轉子a軸和定子A軸間的電角度θ為空間角位移變量。定子電壓、電流正方向按照發電機慣例標示,轉子電壓、電流正方向按照電動機慣例標示,選定各相繞組軸線的正方向為各相繞組磁鏈的正方向。
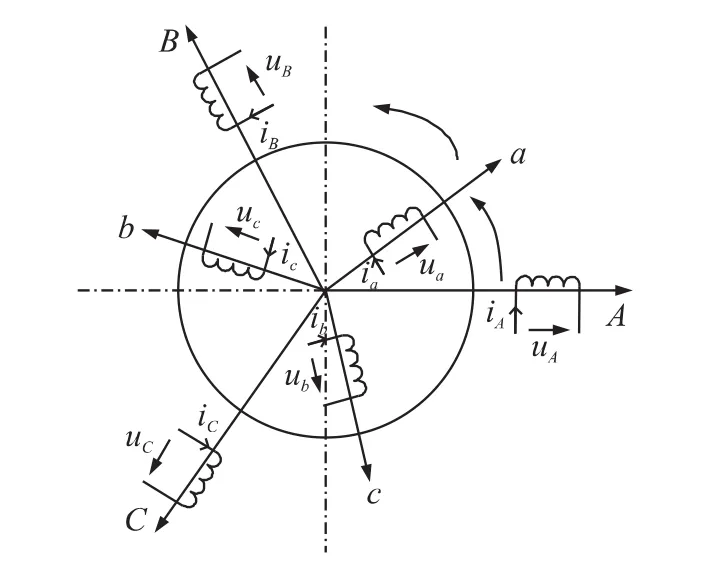
圖3 雙饋電機的物理模型
定子側按發電機慣例,電流以流出為正;轉子側按電動機慣例,電流以流入為正。為便于分析問題,根據坐標變換的思想,可以分別建立出雙饋電機在三相靜止坐標系ABC、兩相同步旋轉坐標系d-q、兩相靜止坐標系αβ下的數學模型[5]。
2 雙PWM變流器及其運行控制
三相電壓源型雙PWM變換器是由兩個完全相同的電壓型三相PWM變換器連接而成,由于在變速恒頻交流勵磁雙饋風力發電系統的運行過程中,兩個PWM變換器的工作狀態經常變換,通常不再以它們工作于整流或逆變的狀態來區分它們,而是按照它們的位置分別稱之為網側PWM變換器和轉子側PWM變換器。三相電壓源型雙PWM變頻器的拓撲結構如圖4所示,圖中的全控器件采用IGBT。兩個三相電壓源型PWM全橋變換器采用直流鏈連接,靠中間的濾波電容C穩定直流母線電壓[1]。
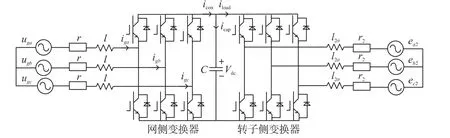
圖4 雙PWM變頻器主電路結構圖
轉子側變流器的作用:一是給DFIG的轉子提供勵磁分量的電流,從而可以調節DFIG定子側所發出的無功功率,二是通過控制DFIG轉子轉矩分量的電流控制DFIG的轉速或控制DFIG定子側所發出的有功功率,從而使DFIG運行在風力機的最佳功率曲線上,實現最大風能追蹤(捕獲)運行[5]。
網側PWM變流器的任務主要有:一是實現能量的雙向流動;二是保證其良好的輸入特性,即輸入電流的波形接近正弦,諧波含量少,功率因數符合要求;三是保證直流母線電壓的穩定,直流母線電壓的穩定是兩個PWM變流器正常工作的前提,是通過對輸入電流的有效控制來實現的[5]。
3 雙PWM的控制策略及仿真
3.1 三相雙PWM變換器的常規控制策略
常規控制策略采用雙閉環PI調節控制策略,引入了負載電流iload前饋,與電壓PI調節器的輸出合成為d軸電流的給定。常規的負載電流前饋控制原理框圖如圖5所示。
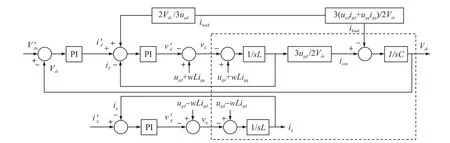
圖5 常規的負載電流前饋控制原理框圖
3.2 三相雙PWM變換器的協調控制策略
常規控制策略的缺點是僅考慮了負載的功率(或電流),而沒有考慮負載功率(或電流)的動態特征(即其微分量)。另外,對負載電流iload的補償是在電流環之內,需要經過電流PI調節器作用后才能產生有效的控制電壓,所以其動態性能受限于PI調節器自身的響應延遲。針對其弊端,提出新型控制策略,其思路是直接在控制電壓處進行補償控制,負載電流iload的補償項中含微分算子s,整合了電機動態性能。補償項不經過電流PI調節器,避免了與PI調節器相關的延遲,大大加快了其動態響應,其原理框圖如圖6所示。
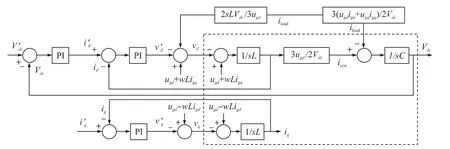
圖6 三相PWM變換器新型協調控制策略原理框圖
3.3 變速恒頻風力發電系統的仿真
分別建立了仿真中所用各個部件的仿真模型,即風力機的仿真模型、雙饋異步發電機的仿真模型、雙PWM的仿真模型、dq-ABC和ABC-dq的坐標變換模型。然后建立了轉子側和網側變換器的控制模塊。最后建立了總的變速恒頻風力發電用雙PWM變換器的協調控制仿真模型如圖7所示。
用三相可編程電源來模擬電網,電壓為120 kV,頻率為50 Hz,輸電線路用等效π型阻抗線路來簡單等效。仿真主要參數有:風力機的風輪半徑R=4 m,最佳葉尖速比λm=0.9,最大風能利用系數值Cpmax=0.4,齒輪傳動比N=8,空氣密度ρ=1.25 kg/m3。雙饋發電機額定功率Pnom=2 000 kW,額定電壓Vnom=690 V,額定頻率Fnom=50 Hz。轉子繞組電阻r2=0.01 pu,定子繞組電阻r1=0.01 pu,轉子繞組漏感Llr=0.1 pu,定子繞組漏感Lls=0.1 pu,互感Lm=3.36 pu。PWM變換器開關頻率f=40×Fnom。直流母線電壓Vdc_nom=1 200 V,電容C_DClink=0.01 F。電感環節:電阻R_RL=0.003 pu,電感L_RL=0.3 pu。
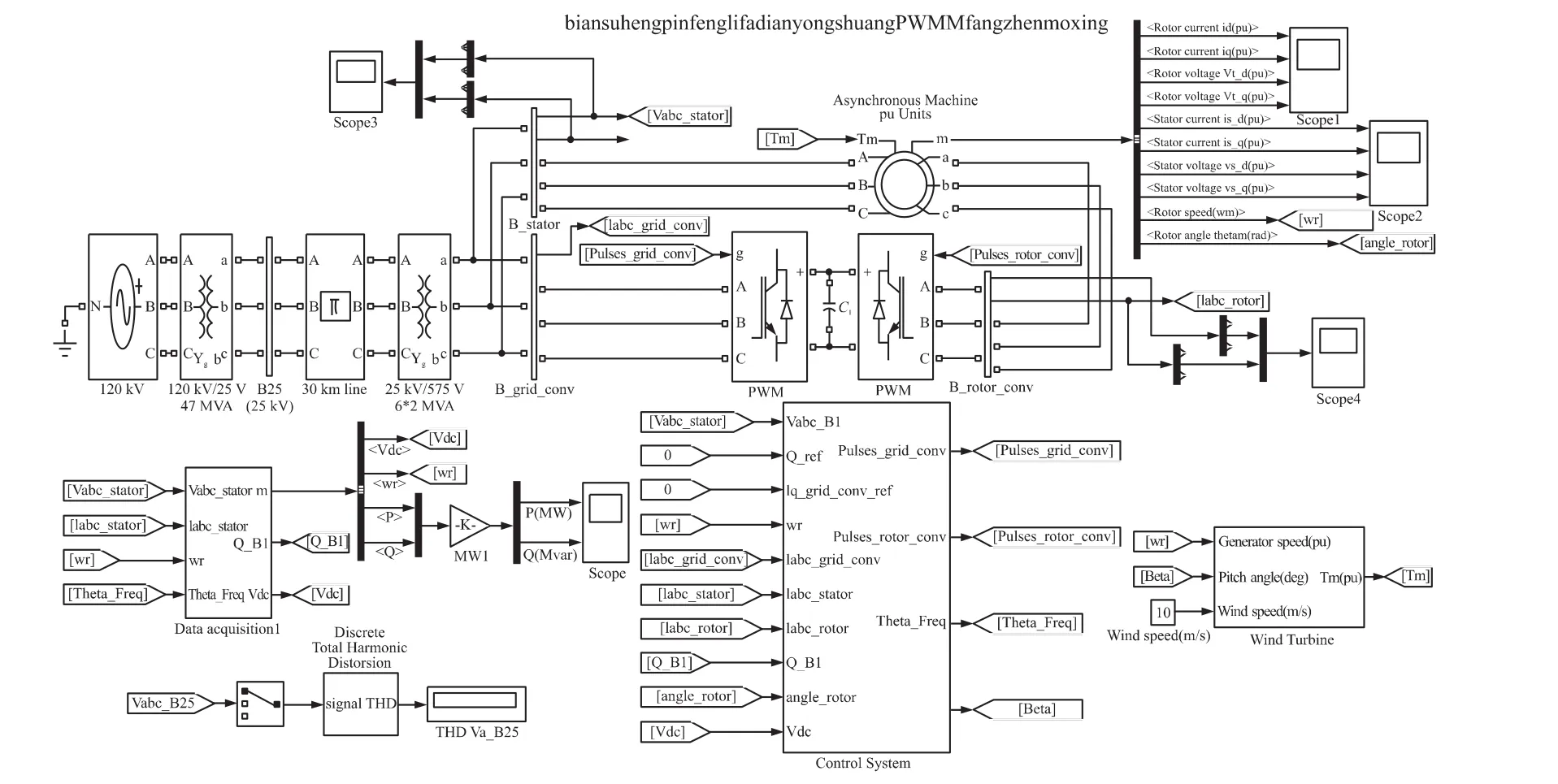
圖7 變速恒頻風力發電仿真圖
圖8對比了采用常規控制策略和采用雙PWM變換器的協調控制策略情況下直流母線電壓,從圖中我們可以看出采用新型協調控制策略具有更好的動態性能和穩定性。通過對比圖9的定子電壓、電流波形和圖10的有功功率、無功功率的波形,我們可以看出無論風速是否變化,定子輸出的電壓、電流波形幅值、頻率都基本相同,實現了風力發電機的變速恒頻運行,另外在定子電流變化的同時,保持了恒定的功率因數,實現了對雙饋感應電機的有功功率和無功功率的獨立控。
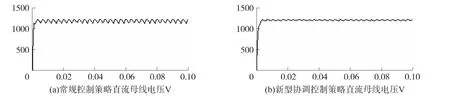
圖8 直流母線電壓對比波形
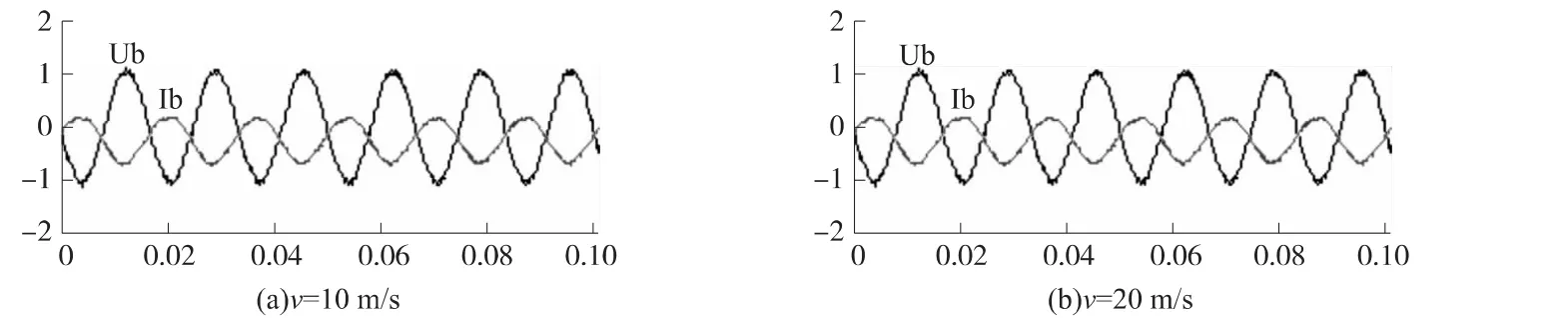
圖9 定子側輸出電壓、電流(v=10 m/s和v=20 m/s)
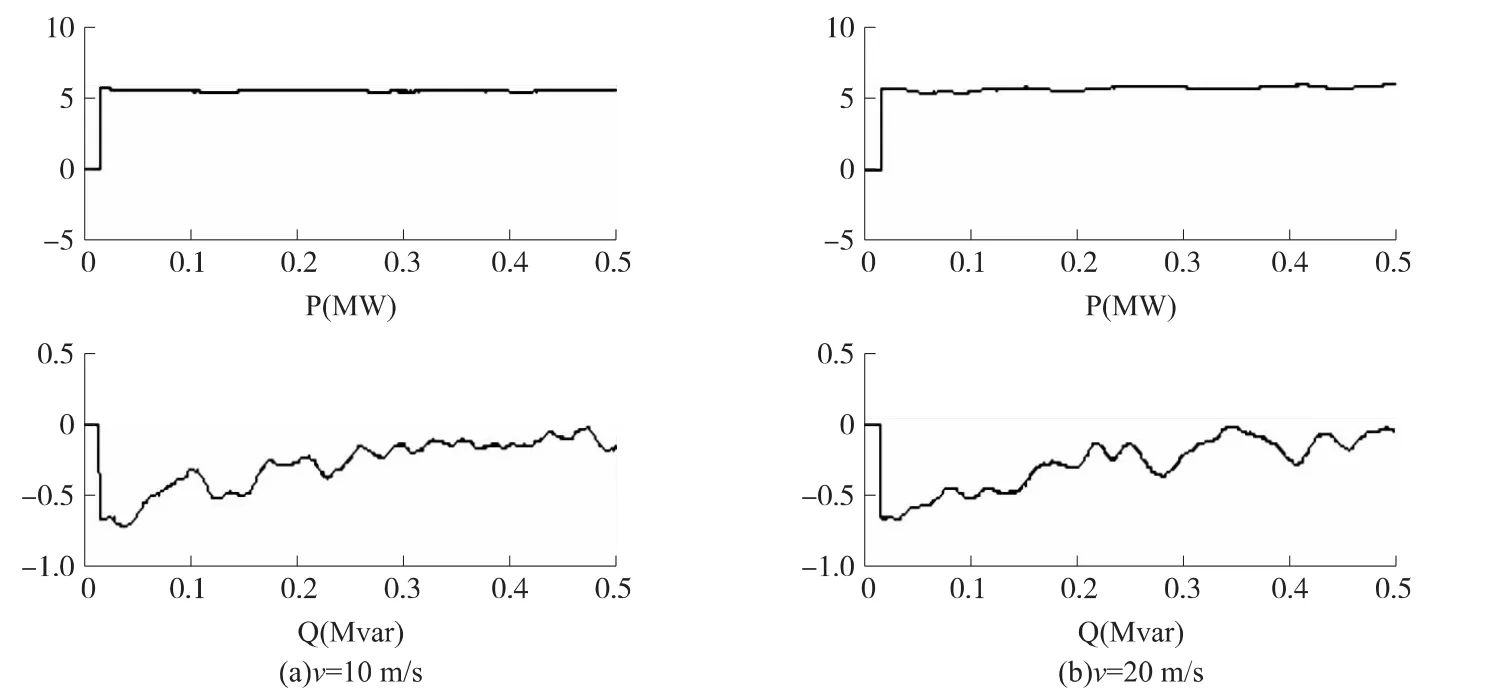
圖10 有功功率、無功功率波形(v=10 m/s和v=20 m/s)
4 結論
通過對比圖8、圖9的定子電壓、電流波形和圖10、圖11的有功功率、無功功率的波形我們可以看出無論風速是否變化,定子輸出的電壓、電流波形幅值、頻率都基本相同,實現了風力發電機的變速恒頻運行,另外在定子電流變化的同時,保持了恒定的功率因數,實現了對雙饋感應電機的有功功率和無功功率的獨立控制。
[1]李建林,許洪華.風力發電中的電力電子變流技術[M].北京:中國輕工業出版社,2003.
[2]卞松江.變速恒頻風力發電關鍵技術研究[D].浙江大學,2003:34-47.
[3]付海濤.變速恒頻風力發電系統的建模與仿真研究[D].華中科技大學,2005:35-34.
[4]阮毅,陳伯時.電力拖動自動控制系統——運動控制系統[M].4版.北京:機械工業出版社,2010:1.
[5]李瑩.雙PWM變流器的建模與控制[D].東北電力大學,2008:2-4.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2014年17期)2014-04-04 11:56:50
