多站遙測數據實時對接方法研究
2014-01-01 03:09:24劉桂生何嘉靖李天寶
無線電工程 2014年11期
關鍵詞:數據處理
劉桂生,高 山,貴 宇,何嘉靖,李天寶
(太原衛星發射中心,山西太原030027)
0 引言
在飛行器飛行試驗中,通常在首區、航區和落區布設多臺遙測站,用于全彈道接力測量,達到遙測數據的不間斷接收[1]。多站遙測數據實時送中心計算機進行處理并顯示,作為實時指揮決策的依據,飛行結束后對遙測數據進行事后處理,處理結果作為飛行器設計評定和故障分析的依據[2,3]。目前對于多站遙測數據的處理模式,事后處理與實時處理互不相同,事后處理先對多站遙測數據進行剪輯和對接,形成一套完整的全程測量數據,然后進行遙測參數處理[3,4];實時處理同時對各站遙測數據分別進行參數處理,然后按照特定策略對多站處理結果進行擇優。隨著參試遙測站增多,這種實時處理模式突顯出軟硬件資源需求急劇增加和擇優過程復雜等弊端,改進方法是解密前進行多站遙測數據實時對接,將多站遙測數據并行處理模式改變為只對一個遙測流進行處理,而實現方法關鍵是解決好遙測幀對齊和檢擇等問題,本文對此進行了研究。
1 實時遙測數據處理模式現狀分析
目前實時遙測數據處理信息流程如圖1所示。
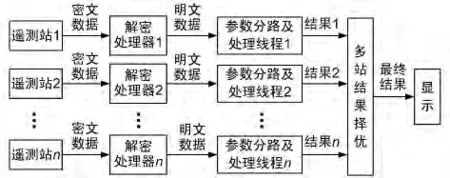
圖1 目前實時遙測數據處理信息流程
各遙測站將接收的密文遙測數據發送到指控中心,先經過解密預處理設備和解密器完成數據解密,輸出明文遙測數據,中心計算機系統對明文遙測數據進行參數分路(挑路)并計算處理,這些過程都是并行針對各遙測站數據獨立進行,分別得到各遙測站數據的處理結果,最后對各站數據處理結果按照事先制定的策略進行擇優,形成最終結果供顯示和指揮決策。
這種處理模式存在以下弊端:
①資源耗費大。由于一個遙測站通常接收多個遙測流數據,每個遙測流數據對應一臺解密處理設備,為了保證可靠性,另按一定比例熱備份解密處理設備,目前還要適應多發并行試驗,對解密處理設備硬件需求數量達到參試遙測站數量2倍或3倍以上。參數分路及處理按所有遙測站的累計遙測流數分別進行,計算機資源耗費大,操作人員的軟件配置維護工作量大[5]。
②擇優策略調整頻繁。每次試驗需根據各遙測站的布站位置、跟蹤弧段和飛行特性事先制定參數擇優策略,花費不少工作量,且由于影響跟蹤測量的因素較多,制定的擇優策略并不能總是十分有效。
③精細化處理程度低。目前是基于各個遙測數據流單獨處理的結果級綜合擇優,未在原碼級對各個遙測數據流進行擇優互補。比如某遙測站某參數只接收到1幀或2幀數據,不符合參數解算條件,該1幀或2幀數據即成了無效數據,不能在處理中發揮作用,若能在原碼級對各個遙測數據流進行逐幀擇優互補,則該1幀或2幀數據就能作為有效數據參與擇優互補,提高參數解算成功的概率[6]。
2 實時遙測數據處理模式改進設想
針對當前實時遙測數據處理模式存在的弊端,提出解密前進行多站遙測數據對接的改進設想,改進后實時遙測數據處理信息流程如圖2所示。各遙測站將接收的密文遙測數據發送到指控中心,先經過多站遙測數據實時逐幀對接,將多個遙測站接收的多個遙測數據流(彈上同源)拼接形成一個完整的全程測量數據流,再經過解密預處理設備和解密器完成數據解密,輸出明文遙測數據,中心計算機系統對明文遙測數據進行參數分路(挑路)并計算處理,結果供顯示和指揮決策。
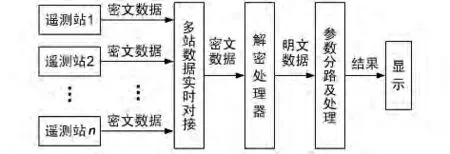
圖2 改進后實時遙測數據處理信息流程
改進后,需要增加實時數據對接服務器,解密處理設備數量只需根據彈上遙測流數量配置,與地面參試遙測站數量無關,可以極大地縮減解密處理設備需求數量。對接后只對一個遙測數據流進行參數分路及處理,計算機資源耗費小,操作人員對軟件配置維護工作量小,省去了每次飛行試驗事先制定參數擇優策略。各個遙測站接收的每一幀數據都能參與對接過程,尤其在傳輸點數很少的遙測參數解算中作用明顯。
3 多站遙測數據實時對接方法
在實際飛行試驗中,由于目標姿態變化、級間分離、尾焰和設備故障等多種原因,地面遙測設備獲取的遙測數據經常出現不同程度的亂散段[7],網絡傳輸過程中還可能發生數據丟失現象[8,9],單站測量數據往往不能滿足處理的要求,因此需要對多站數據進行對接,獲取完整的測量數據。數據對接是事后數據預處理工作的重要內容,文獻[3,4,10]等介紹了事后處理數據剪輯和對接的方法,但鮮見實時遙測數據對接方法的研究文獻。
3.1 數據實時對接與事后對接的區別
遙測數據實時對接可以借鑒事后對接的方法,但由于處理時機和處理要求等特點不同,實時對接與事后對接方法必然存在區別。
①實時對接是一種實時、不可逆的一次性行為,必須對當前接收的有限幀數據做出及時判斷、選擇,對接方法不能包含后驗信息,實時性、可靠性要求高。事后對接在相對寬松的期限內對各站記錄的遙測數據文件進行處理,通過對遙測數據文件搜索、檢查,可以獲取豐富的數據質量后驗信息,然后基于這些豐富的后驗信息進行數據對接,對接過程允許多次重復。
②事后對接可以采用基于遙測地面時間的數據對接方法和基于遙測全幀計數的數據對接方法,基于遙測地面時間的數據對接方法和對接過程較為復雜,而基于遙測全幀計數的多站數據對接方法處理簡單[11]。解密前數據實時對接只能采用基于遙測地面時間的數據對接方法,因為全幀計數作為遙測參數被加密。
3.2 遙測數據的幀格式
遙測站發送到指控中心的遙測數據是標準子幀數據流,子幀數據格式如圖3所示[10]。幀數據格式中的時間字是由地面遙測站添加在數據幀前面的時統時間,記錄了當前幀到來時時碼接收器的解調時間。副幀計數字也是地面遙測站添加在數據幀前面的副幀同步字,當副幀鎖定時以0作為全幀起點,每幀加1,直至全幀結束,當副幀未鎖定時保持0不變。時間字、副幀計數字和同步碼均不加密,遙測數據碼根據需要加密。一個全幀由若干個子幀組成(無副幀時一個子幀即相當于一個全幀)。
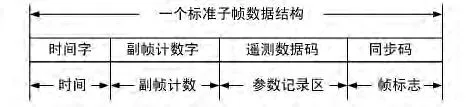
圖3 標準子幀數據結構
3.3 遙測幀對齊
實時對接前,必須首先實現遙測幀對齊,即從接收的多站遙測數據中識別出同一幀遙測數據。因為全幀計數作為遙測參數被加密,只能依據遙測站添加在數據幀前面的時統時間進行遙測幀對齊。由于各遙測站接收遙測信號的電波傳輸延時和時統延時不同,所以各遙測站添加在同一幀數據前面的時間經常存在差異,必須經過適當的延時修正才能完成遙測幀對齊。因為實時只能做粗略的延時修正,經過延時修正可以縮小這種差異,但很難完全消除這種差異,只要這種差異明顯小于緊鄰2幀信號的采樣時間間隔即可。
實時對接中,可以利用理論彈道進行電波延時修正,電波延時計算方法如下[12]:

式中,C為光速;Ri為ti時刻目標與遙測站的距離;Δti為ti時刻電波傳輸延時。電波延時修正誤差主要來源于實際飛行彈道與理論彈道的誤差,假設這2種彈道誤差極限為300 km,則帶來1 ms電波延時修正誤差。
時統延時包括B碼信號傳輸延時和B碼終端解調延時,有些遙測站能達到幾百μs,但發射前經過時統延時精確測定后[13],通過B碼終端自身具備的延時修正功能,可將時統延時降至幾十μs。地面遙測站數據配時精度為0.1 ms,則配時誤差<0.1 ms。
綜上,按極限情況估算,經過延時修正后,各遙測站同一幀數據的時間差異<1.2 ms,且差異主要由電波延時引起。
理論上有按子幀對齊和按全幀對齊2種途徑,但由于子幀周期很小(通常為百μs級),經過延時修正后各遙測站同一幀數據的時間誤差在極限情況下很可能大于子幀周期,導致無法準確識別同一子幀數據,因此按子幀對齊不可靠。全幀周期通常在10 ms以上,以全幀中第1子幀的時間作為全幀時間,則全幀時間極限誤差與全幀周期相差一個量級,可以準確識別同一全幀數據,因此實時對接應按全幀對齊遙測數據,只要滿足延時修正后時間差<1.2 ms或1/5全幀周期即可認定為同一全幀數據。
飛行試驗中遙測站A和遙測站B(兩站相距390 km)連續若干幀數據(子幀周期0.312 5 ms,全幀周期10 ms,副幀長N)電波延時修正后的時間如表1所示。其中,遙測站A距目標25 060 m,電波延時修正為0.1 ms;遙測站B距目標388 340 m,電波延時修正為1.3 ms。
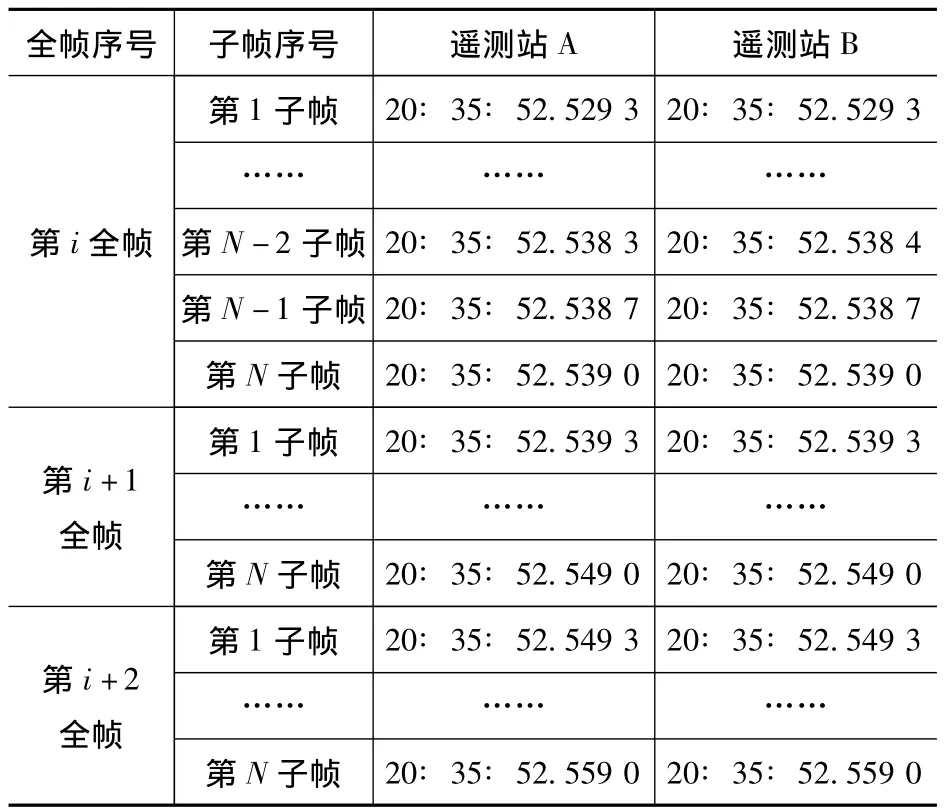
表1 遙測站A和站B連續若干幀數據延時修正后的時間
按照延時修正后時間差<1.2 ms即認定為同一幀數據的判決標準,表1中A站第i+1全幀時間與B站第i和i+2全幀時間的差值均為10 ms,與B站第i+1全幀時間的差值為0 ms,可以準確、唯一地對齊A站和B站的第i+1全幀,但A站第i全幀的第N-1子幀時間與B站第i全幀的第N-2、第N-1和第N子幀時間的差值均<1.2 ms,不能準確、唯一地對齊子幀。
3.4 全幀整理
為了實現按全幀對齊遙測數據,必須將子幀數據流整理成全幀數據流,可以利用地面遙測站添加在子幀數據前面的副幀計數字進行副幀同步,完成全幀整理。這種副幀同步方式實質就是ID副幀同步方式。
3.5 全幀檢擇對接
多站遙測數據全幀對齊后,即可進行逐幀對接。對接時,必須對整理出的全幀進行檢查,主要是檢查時碼和幀同步碼,比較幀內數據,以便從多站接收的同一全幀中選出最可信的一幀。
①時碼檢查。檢查該全幀中每一子幀時間碼是否正常,主要判斷時間是否為非法值,與當前系統時間是否一致,連續2幀的時間間隔是否符合子幀周期,時間是否連續遞增。
②幀同步碼檢查。檢查全幀內每個子幀的幀同步碼是否符合要求,對幀同步碼的錯誤位數進行統計。錯誤位數越少,表明數據質量越好,優先選擇幀同步碼完全正確的全幀。
③幀內數據比對。全幀數據對齊后,若有3個以上遙測站都接收到某個全幀,可以對幀內數據相互比較,即比較幀內數據的每一個字節原碼是否一致,按照三判二原則,如果存在2個全幀幀內數據完全一致,則從中選擇一個;如果不存在,則按照幀同步碼錯誤位數最少、之前3個全幀內幀同步碼錯誤位數最少等條件選擇最可信的一幀。
將檢擇的全幀數據按順序組織成一個數據質量相對較好的遙測流,提供解密和遙測數據實時處理。
4 結束語
針對實時遙測數據特點,研究了可行的對接方法,解決了多站遙測數據實時對接關鍵問題,有利于改進實時遙測數據處理模式,進而節省軟硬件資源,簡化參數擇優策略,提高處理精細化程度。在實際應用時,由于各遙測站數據至中心的網絡傳輸延時不一致[14],中心需根據實時性要求合理選擇接收數據緩沖時間,也可以在維持現有實時處理模式基礎上,將實時對接形成的遙測流作為所有遙測站的綜合備份流。
[1] 孫 喜,謝會琴.遙測多臺車記錄參數信息融合方法及實現[J].導彈技術,2009(2):68-70.
[2] 黃學德.導彈測控系統[M].北京:國防工業出版社,2000.
[3] 陳以恩.遙測數據處理[M].北京:國防工業出版社,2002.
[4] GJB 2238A-2004.遙測數據處理[S].
[5] 張彩月,陳 良.基于數據庫的遙測數據傳輸系統的設計[J].無線電通信技術,2013,39(3):46 -49.
[6] 高 義,劉承禹.基于軟件架構設計的多源信息融合系統[J].無線電通信技術,2012,38(5):60 -63.
[7] 郭引蘭,劉桂生,韓文虎.遙測數據散亂原因分析方法研究[J].導彈試驗技術,2003(2):34-36.
[8] 種 景.試驗IP網組播丟包問題研究[J].無線電通信技術,2012,38(4):54 -56.
[9] 周 磊.網絡流量丟包率預測模型[J].無線電工程,2011,41(10):7 -8,20.
[10]張 東,吳曉琳.導彈遙測數據預處理方法研究[J].信息技術,2011(11):134-137.
[11]張向林,唐海波,成紅艷.遙測數據對接中的副幀計數修正方法[J].導彈技術,2011(3):62-64.
[12]謝會琴,孫 喜.彈上遙測時間和地面時間分析研究[J].導彈試驗技術,2008(4):49 -52.
[13]李 剛,魏海濤,孫書良.導航設備時延測量技術分析[J].無線電工程,2011,41(12):32 -35.
[14]盧 冀,張之義,王俊芳,等.一種適用于虛擬機網絡的數據包高效傳輸方法[J].無線電通信技術,2013,39(6):34-36,47.
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
