基于步進電動機的智能電動窗簾設計與實現
2014-01-13 10:11:48李燕君
微特電機 2014年10期
馮 娟,李燕君
(四川師范大學,成都610101)
0 引 言
隨著科技的進步,智能窗簾已經開始應用到普通的家居生活中。本文采用步進電動機作為執行元件,實現了對窗簾的自動和手動控制;同時用戶可以根據情況選擇相應的工作模式。本系統克服了傳統窗簾的一些缺點,滿足了人們對智能化的需求,為家居生活提供了更多的便利。
1 系統的總體結構及工作原理
本設計主要分為五個主要模塊:主控模塊、紅外遙控模塊、光線檢測模塊、電機驅動及電機模塊、位置檢測模塊。紅外遙控模塊利用紅外接頭,將信息接收后傳送給主控器;光線檢測模塊檢測周圍光線明暗程度,并將信號傳給主控器。主控單元則采用STC89C52 單片機,處理接收到的信息并輸出控制步進電機運行、停止、正轉、反轉,以實現對窗簾的升降控制。其結構框圖如圖1 所示。

圖1 系統組成框圖
2 主要硬件設計
2.1 紅外遙控電路設計
紅外遙控模塊采用1838T 紅外接收頭。1838T屬于一體化紅外接收頭,需要完成對紅外信號的接收、放大、濾波、解碼等任務。當遙控器按下按鍵后,就會發出32 位不同的二進制碼,單片機IRD 接口接收到遙控碼后進行相應的解碼控制處理。其紅外接收電路如圖2 所示。
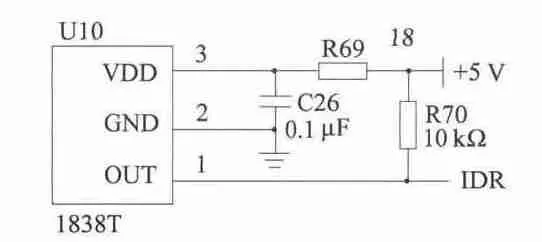
圖2 紅外接收器電路圖
2.2 光線檢測模塊
光線檢測模塊的電路圖如圖3 所示。光敏電阻模塊由光敏電阻和10 kΩ 固定值電阻組成測量橋,當光敏電阻的阻值隨著光線變化時,其分壓值也會改變。經由LM393 電壓比較器后,輸出數字量1 或者0。此電路在光線未達到設定值時,輸出為高電平;達到設定值時,則輸出為低電平。將此輸出口與單片機相連,則可以通過高低電平的檢測從而得知光線的變化情況,再控制電機轉動。
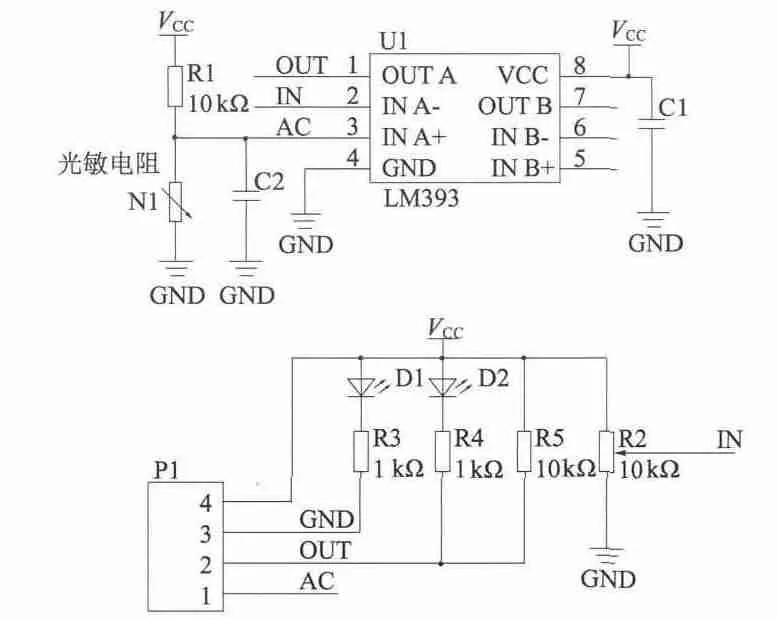
圖3 光敏電阻模塊電路
2.3 步進電動機及驅動
本文采用24BYJ48A 步進電動機作為執行元件。該電機是一種把電脈沖信號轉換成線位移或者機械角位移的開環控制元件,它體積小、轉速高、振動低,同時電機采用一-二相勵磁,通過軟件來實現對步進電動機步距的控制。其分辨率高、運轉平滑,勵磁如表1 所示。
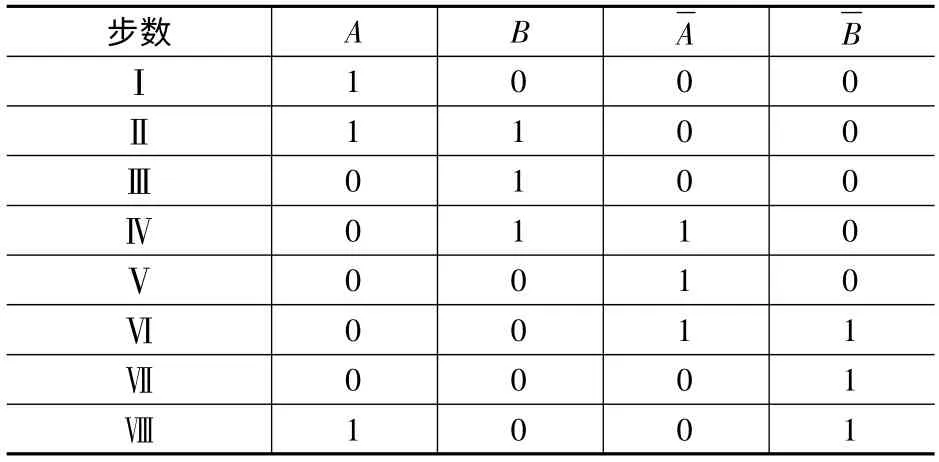
表1 一-二相勵磁順序表
本文驅動部分則采用ULN2003 驅動器,該芯片能夠承受較高電壓和電流,力矩大,精度高,具有高效的驅動性能。驅動電路如圖4 所示。
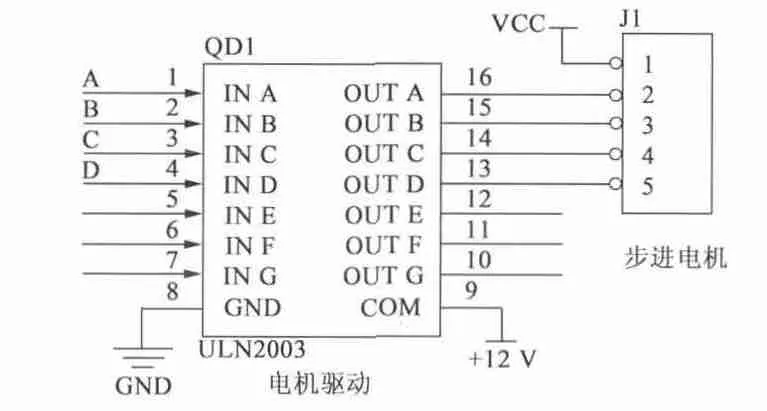
圖4 驅動電路
2.4 位置檢測模塊
考慮到設計的方便,本文用到兩個行程開關,用以判斷窗簾是否到達預定位置。當窗簾到達頂端或者底端時,會觸碰到行程開關使其閉合,此時會將此線路接地,線路連通。當窗簾離開行程開關時,開關會在彈簧的作用下恢復到常開狀態。
2.5 控制電路接口設計
在本文中單片機P3.2 跟紅外信號IRD 連接、P3.3 與光線檢測信號OUT 連接、P2.0 與窗簾頂端行程開關S1 連接、P2.1 與窗簾底端行程開關S2 連接,P1.0、P1.2、P1.3、P1.4 與電機驅動器ULN2003的A,B,C,D 數據端連接。實現了整個系統的完整連接。連接電路圖如圖5 所示。
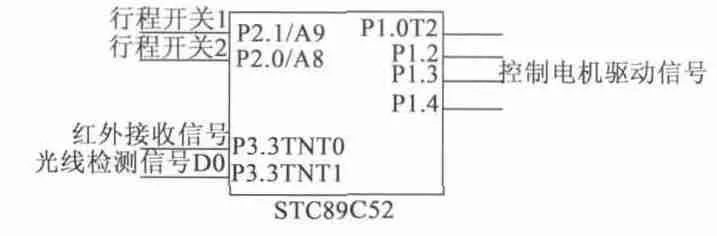
圖5 行程開關
3 軟件實現及聯合調試
系統軟件設計首先對外部中斷和定時器中斷進行初始化。然后進行紅外處理,調用紅外處理模塊和光線檢測模塊對標志位進行判斷。根據標志位Flag 的狀態來判斷電機狀態,Flag1,4 為正轉,Flag3,5 為反轉,Flag0 為停止。正轉則按正轉相序:A→AB→B→BC→C→CD→D→DA 輸出,反轉則按反轉相序:A→DA→D→CD→C→BC→B→AB 輸出,實現電機的正反轉運行。整個系統的流程圖如圖6所示。將調試好的程序下載到硬件系統聯合調試,如圖7 所示。系統能夠平穩運行,實現了窗簾的上升、下降等智能控制。
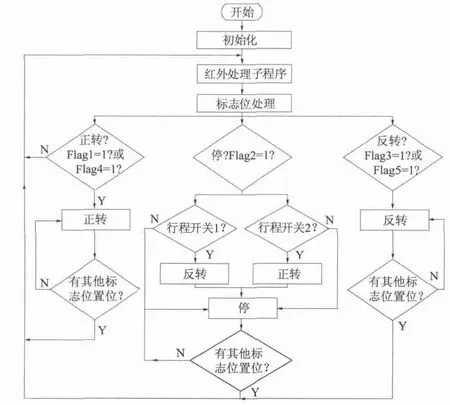
圖6 主程序流程圖
圖7 實物調試圖
4 結 語
用步進電動機控制的智能電動窗簾目前還比較少且價格較高。本文利用步進電動機的特點,結合達林頓管的特性,實現了智能窗簾控制。實驗結果表明:該設計功耗小,電機運行平穩,能夠完整實現對窗簾的智能控制且噪聲小,轉矩波動小,效率高,非常適合智能窗簾在國內市場的普及。
[1] 李朝青.單片機原理及接口技術[M]. 北京:航空航天大學出版社,1999.
[2] 郭天祥.新概念51 單片機C 語言教程:入門、提高、開發、拓展全攻略[M].北京:電子工業出版社,2009.
[3] 吳朝霞.控制電機及其應用[M].北京:北京郵電大學出版社,2012.
[4] 蘆健,彭軍,顏自勇,等.自學習型智能紅外遙控器設計[J].國外電子測量技術,2006,25(8):63-66.
[5] 張自強.復式住宅中智能家居系統的研究與實現[D]. 西安:西安科技大學,2006.
[6] 趙健,吳順偉,陳興美,等.基于單片機的光敏窗簾及聲控燈系統的設計[J].泰山學院學報,2013,35(3):101-103.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
