測量平差中必要觀測數的研究
2014-01-27 05:54:52胡圣武關勝況
地理空間信息 2014年2期
關鍵詞:測量
胡圣武,關勝況
(1.河南理工大學 測繪學院,河南 焦作 454000)
測量平差中必要觀測數的研究
胡圣武1,關勝況1
(1.河南理工大學 測繪學院,河南 焦作 454000)

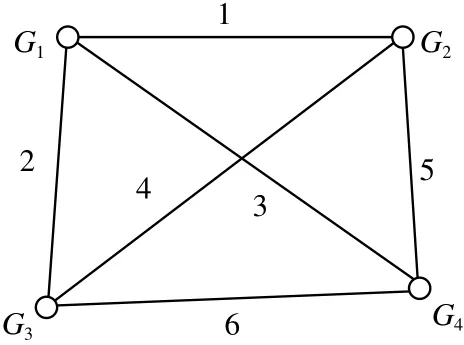
測量平差中必要觀測數決定了平差結果的正確性和條件方程的個數。通過長期的教學發現,正確決定必要觀測數仍是一個比較困難的問題,特別是隨著GPS網平差和坐標值平差的到來,必要觀測數的確定越來越困難。就必要觀測數在平差中的作用進行了系統總結和分析,就水準網、平面控制網、坐標值平差和GPS網的必要觀測數的確定進行了系統分析和研究。
必要觀測數;水準網;平面控制網;GPS網;坐標值
1 必要觀測數在平差中的作用
在測量平差中,無論采用何種平差模型都要先確定必要觀測數,如果必要觀測數不準確,平差就不可能有正確的結果。
1)必要觀測數決定平差模型的自由度。設必要觀測數為 t,觀測數為n ,則不管采用何種平差,其自由度r 為:r=n-t 。可知,只要觀測數不變,則r 不變。
2)必要觀測數確定條件方程的個數。如果不選參數,則列立的方程個數為: c=r=n-t;如果選 u個參數,且參數獨立,則列立方程個數為:c=r+u=n-t+u ;如果所選u 個參數中,有 s個不獨立參數,則列立方程個數為:c=r+u-s=n-t+u-s 。由此可知,必要觀測數決定條件方程個數:若必要觀測數太少,則條件方程數太多,所列立的方程之間不獨立;若必要觀測數太多,條件方程數太少,則列立方程數不足,影響平差結果。
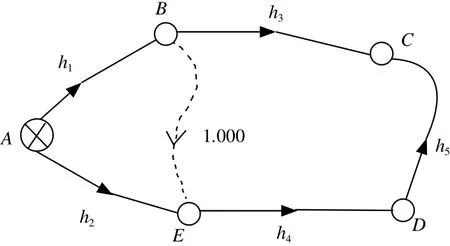
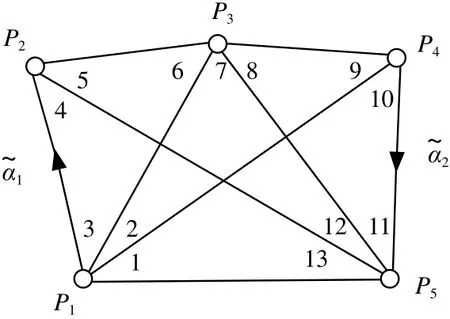
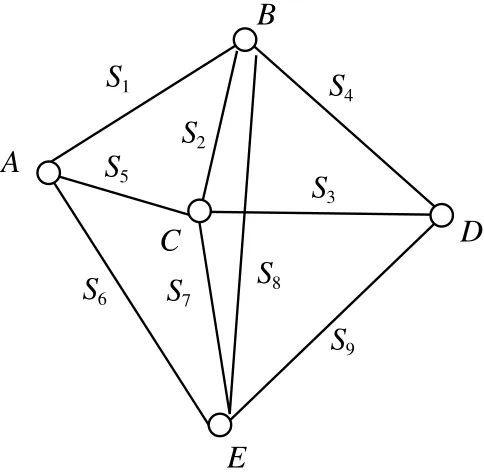
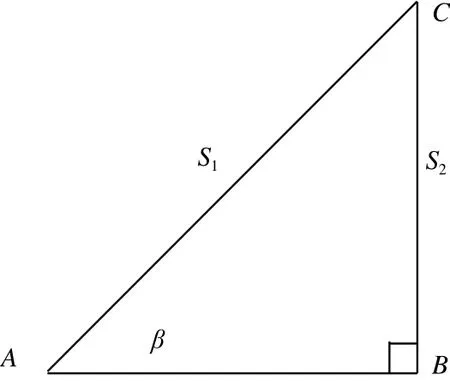
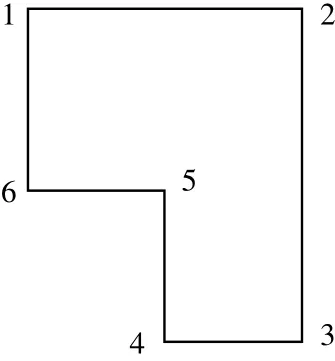
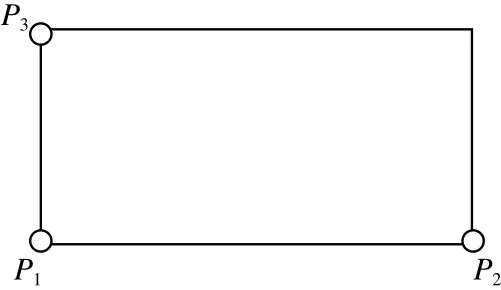
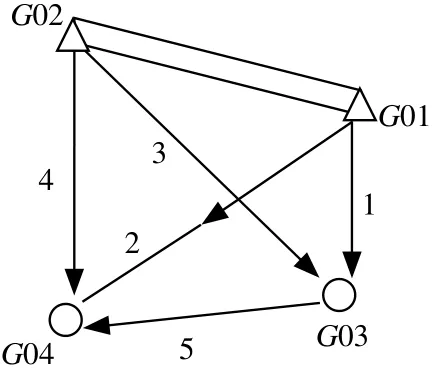
3)必要觀測數確定采用平差模型的種類。平差模型的確定實際上是由所選參數個數和必要觀測數確定的。設所選參數為u 個,且參數獨立,有3種情況:u=0 ,則選用條件平差; u 設所選參數為 u個,且不獨立參數為s 個,則有2種情況:u-s 對于水準網必要觀測數的確定比較簡單,主要分為3種情況:①如果有已知水準點,則必要觀測數就等于未知點的個數。②如果沒有已知水準點,則必要觀測數就等于點數減1。③對于水準網而言,有“兩點之間的高差是已知的”等特殊情況,在這種情況下,必要觀測個數要減去已知值的個數。 如圖1所示, A為已知點,B、C、D、E 為未知點,已知B、E 兩點之間高差ΔhBE=1.000 m ,求必要觀測數t 。 由于 n=5,有已知點,如果沒有已知B、E 兩點之間高差,則t=4 ,必要觀測數t=4-1=3 。 圖1 水準網示意圖 1)有2個已知點的測角網。對于這種情況,各種誤差處理與測量平差教材都說得很清楚,必要觀測數t=2p,p 為未知點的個數。 2)有一個已知點或沒有已知點的測角網。對于測角網而言,如果要進行平差則必須要有2個已知點,若不夠,則需要把未知點假設成已知點。因此,對于一個已知點的情況, t=2(p-1),沒有已知點,則t=2(p-2)。 3)特殊情況。測角網會出現這些情況:已知2點之間的距離、已知2點之間的方位角或兩線垂直等。判斷其必要觀測數的步驟如下:統計出已知值的個數,設為m ;判斷出該平面網的已知點,然后根據已知點的情況,判斷出必要觀測數t1;該平面控制網的必要觀測數 t 為 :t=t1-m 。 如圖2所示,觀測了12個角,已知 p1、p2兩點之間的方位角為 α~1,p4、p5兩點之間方位角為 α~2,求其必要觀測數。已知值的個數m=2 ;由于沒有已知點,則 t1=(5-2)×2=6 ;必要觀測數 t 為 :t=t1-2=4 。 圖2 測角網示意圖 邊角網和測邊網與測角網不同的是邊都要進行測量。對于有2個已知點的測邊網和邊角網的必要觀測數與測角網一樣。沒有已知點或只有一個已知點的情況與測角網不一樣。 1)有2個已知點的邊角網與測邊網。這種情況下其必要觀測數等于2倍未知點個數。 2)沒有已知點或只有一個已知點的邊角網和測邊網。該情況與測角網一樣,也要假設一個已知點或2個已知點,只不過是假設點所測的邊要作為必要觀測值,則已知一個點的必要觀測數為t =2(p-1)+1 ,沒有已知點的必要觀測數為t=2(p-2)+1,其中p 為未知點的個數。 3)特殊情況。測邊網或邊角網有時會出現一些已知值,如兩條線之間成直角、已知某條邊的方位角等,判斷其必要觀測數的步驟如下:統計出已知值的個數,設為m ;根據其已知點的個數,確定其必要觀測數 ;必要觀測數為:t=t2-m 。 如圖3所示,由于沒有已知條件,也沒有已知點,則必要觀測數t=2(5-2)+1=6+1=7。直角三角形ABC ,測了2條邊和1個角,是一個簡單的三角網,有一個已知條件,即∠ABC=90°,沒有已知點,則t2=2(3-2)+1=3。由于有一個已知值,所以該三角形測角網的必要觀測數為:t=t2-1=3-1=2 (見圖4)。 圖3 測邊網示意圖 圖4 直角三角形ABC示意圖 一般而言,對于坐標值平差,有u 個點,每個點有一對坐標(x,y) ,則其觀測數就是n=2u ,必要觀測數根據確定平面一個點需要2個條件,則t=2u ,因此 n=t無法進行平差,所以沒有已知值的坐標值是無法進行平差的。 一般而言,在坐標值平差中有兩直線所成的角度、兩線平行、圖形的已知面積、兩點之間的已知距離等已知值。確定其必要觀測數的步驟如下:統計出已知值的個數,設為 m;計算點數設為u ,則計算出t3=2u;必要觀測數為:t=t3-m 。 圖5是對一直角房屋進行數字化,有6個點,12個坐標值,求其必要觀測數。 解:1)由于是直角房屋,在圖5中有5個直角和1個270° ,應該說是有6個已知值,但由于是多邊形,確定了5個角的值,第6角的值就確定了,所以,在本圖中只能算5個已知值,m=5; 2)由于有6個點,所以t3=2×6=12 ; 3)必要觀測數為:t=t3-m=12-5=7 。 圖5 直角房屋示意圖 圖6 矩形房屋線劃圖 圖6中數字化了3個點P1、P2、P3,已知P1P3和P1P2的長度,且P1P3與P1P2保持垂直,求其必要觀測數。由于有3個已知值,則m=3 ;由于有3個點,則t3=2×3=6;必要觀測數為:t=t3-m=6-3=3。 GPS網可分為有已知點和沒有已知點2種情況。 有已知點情況下,其必要觀測數為未知點數的3倍。 如圖7所示,G01、G02 為已知點,有5條基線向量,G03、G04 兩個待求點,求其必要觀測數。由于有2個待求點,則必要觀測數:t=3×2=6。 如果沒有已知點,則假設一個已知點,設待求點的個數為u ,則其必要觀測數為:t=3×(u-1) 。 如圖8所示,4個待求點,沒有已知點,觀測了6條基線向量 ,求其必要觀測數。由于沒有已知點,則其必要觀測數為:t=3×(u-1)=3×3=9。 圖7 有已知點GPS網示意圖 圖8 無已知點GPS網示意圖 本文就必要觀測數的確定進行了系統研究,特別是對坐標值平差、GPS網平差的必要觀測數的確定進行了研究。需要注意以下問題: 1)雖然都是平面控制網,但坐標值平差的必要觀測數的確定與測角網、測邊網和邊角網的必要觀測數的確定不一樣。 2)對于邊角網和測邊網,如果沒有已知點或只有一個已知點,一定要掌握其必要觀測數與測角網不一樣,要在測角網的基礎上加1。 3)GPS網是三維坐標,確定一個點需要3個條件。 4)確定已知值的個數不能重復,特別是在坐標值平差中。 [1] 姚宜斌,邱衛寧.測量平差問題中必要觀測數的確定[J].測繪通報,2007(3):14-16 [2] 寧偉,歐吉坤,寧亞飛.測量平差中必要觀測數確定的新方法[J].測繪通報,2010(7):45-47 [3] 寧偉,歐吉坤,張發順.測量平差中必要觀測數確定的再探討[J].測繪通報,2010(10):11-14 [4] 左廷英,鄧才華,劉慶元.關于《測量平差》課程改革的思考[J].礦山測量,2006(1):84-86 [5] 陳本富.關于《測量平差基礎》教學的若干思考[J].北京測繪,2007(1):60-63 [6] 趙超英,張勤.再論經典測量平差模型間的內在聯系[J].測繪通報,2006(3):26-27 [7] 鄧永和.《再論經典測量平差模型間的內在聯系》的研究[J].鐵道勘察,2009(2):8-11 [8] 陶本藻,邱衛寧.誤差理論與測量平差[M].武漢:武漢大學出版社,2012 [9] 胡圣武,肖本林.誤差理論與測量平差基礎[M].北京:北京大學出版社,2012 [10] 王穗輝.誤差理論與測量平差基礎[M].上海:同濟大學出版社,2010 Research on Essential Observation Number of Surveying Adjustment byHU Shengwu Observation Number can decide correctness of adjustment outcome and number of condition equation. It is a commonplace talk of an old scholar of the problem how to define essential observation number, but correctly defi ning essential observation number is a diffi cult question from long-term teaching. Especial advent of GPS network adjustment and coordinate value adjustment,it is more and more diffi cult to defi ne essential observation number. The paper systematic and wholly researched the question, and laid the foundation promoting its application. essential observation number,leveling network,horizontal control network,GPS network,coordinate value P207 B 1672-4623(2014)02-0121-03 10.11709/j.issn.1672-4623.2014.02.043 2013-04-28。 項目來源:山東省基礎地理信息與數字化重點實驗室開放研究基金資助項目(SD080707)。 胡圣武,博士,副教授,主要從事GIS基礎理論和圖像處理技術研究。2 水準網必要觀測數的確定
3 平面控制網必要觀測數的確定
3.1 測角網
3.2 邊角網和測邊網
4 坐標值平差必要觀測數的確定
4.1 必要觀測數的確定
4.2 實例分析
5 GPS網必要觀測數的確定
5.1 有已知點
5.2 無已知點
6 結 語
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00