地下空間三維激光掃描雙軸同步插補算法研究
2014-03-04 01:36:34馬志,張達,崔昊
中國礦業 2014年2期
馬 志,張 達,崔 昊
(1.北京礦冶研究總院,北京102600;2.金屬礦山智能開采技術北京重點實驗室,北京102600)
近年來,對于地下空間精密探測的需求越來越迫切,但是由于特殊環境的限制,這又一直是困擾測量人員的一大難題。然而三維激光掃描測量技術的出現,可以有效的解決這個問題。BLSS-PE礦用三維激光掃描測量系統,對于礦山環境具有很強的適用性,在地下空間測繪、采空區探測、出礦量回填量等體積計算、爆破效果評估、殘礦量分析評價等方面都具有廣泛的應用前景[1]。三維激光掃描測量技術,最核心的部分是如何更好的獲取地下空間形態,在此基礎之上才能進行后期處理。然而,要想準確的獲取地下空間的掃描數據,運動控制是其關鍵技術。以BLSS-PE礦用三維激光掃描測量系統為基礎,本文提出了一種雙軸同步插補運動控制算法,它在準確獲取地下空間三維形態、提高空間形態分辨率方面具有重要意義。
1 礦用三維激光掃描系統組成
BLSS-PE三維激光掃描測量系統主要由掃描主機、電源箱、延長桿、靶標、手持終端、線纜等組成,其中掃描主機是最主要的功能模塊,實物如圖1所示。掃描系統最常用的支撐方式有兩種,其一為通過三腳架適配器直接安裝在三腳架上,其二為利用延長桿,將掃描主機伸進采空區或者其他地下空間。架設在單個三腳架上,操作簡便;利用延長桿探測,可以增加掃描主機的探測能力,同時保護測量人員遠離危險地帶。掃描主機通過末端的激光器來采集距離值,通過兩個編碼器來采集兩個角度值,綜合這三個測量值,就可以得到三維掃描數據。

圖1 掃描主機實物圖
BLSS-PE礦用三維激光掃描測量系統的掃描主機具有兩個自由度,主要可分為三部分,構成一個兩級串聯系統,如圖2所示。

圖2 主機結構簡圖
如圖2所示,A部分是基座,固定不動,通過軸向電機與B部分連接;B部分是中間段,放置控制系統;C部分是主激光器,同時也是兩個電機軸的執行末端,它通過徑向電機與B部分連接。
2 雙軸同步插補控制算法
掃描主機以AMR9作為核心控制器,內置WinCE嵌入式處理系統,通過網絡端口接收輸入指令。控制器通過兩個驅動器,來控制兩個電機,再分別通過編碼器來采集電機運行的速度和位置信息。BLSS-PE礦用三維激光掃描測量系統,是一個兩級串聯機構,兩個自由度分別構成兩個閉環控制系統[2],如圖3所示。

圖3 主機閉環控制系統示意圖
主激光器作為兩個電機軸的執行末端,也是距離值的測量模塊,在地下空間的三維激光掃描過程中,如果兩個電機都做勻速轉動,就會造成掃描點云疏密不同。這是很多因素造成的,比如目標物到掃描主機的距離、目標物表面輪廓形狀、目標物表面反射率以及空氣濕度和粉塵濃度等等。要想更準確的獲取地下空間的三維形態,就必須協調兩個電機同步運動,根據上述影響因素,做出實時調整,令主激光器在地下空間劃出不規則的樣條曲線。要想提高BLSS-PE礦用三維激光掃描系統在任意地下空間的掃描分辨率,令主激光器在地下空間劃出任意不規則的樣條曲線,就必須進行樣條曲線插補[3],而且是兩個電機軸的同步插補。
插補算法就是給出運動曲線上的某些點,然后將這些已知點之間的空間,進行數據密化,從而形成要求的輪廓曲線。要完成上述工作,首先要給出軸向電機運行的一系列位置點P11,P12,P13,P14……以及徑向電機運行的一系列位置點P21,P22,P23,P24……。然后將這兩個電機軸的運動同步起來,組成二維位置點(P11,P21),(P12,P22),(P13,P23),(P14,P24)……
對于單個電機軸的運動,最主要的是控制已知位置點附近的加減速過程。由于電氣系統和機械系統都會存在一定的慣性,使得執行機構的速度不能突變,否則就會引起沖擊、震蕩或者超調,進而使得整個系統運動精度下降。PVT插補模式可以很好的解決加減速問題,通過給出每一個插補點的位置、速度、時間信息,令執行機構運動出任意形狀的樣條曲線[4]。在PVT插補模式下,時間T是兩個插補點之間的運動周期,加速度與時間成線性關系,則速度是時間的拋物線函數,位置是時間的三次曲線函數。PVT插補模式下,位置、速度、加速度以及加加速度與時間的函數關系,如圖4所示。

圖4 PVT插補模式控制示意圖
在PVT插補模式下,位置是時間的三次函數,則有式(1)。

速度、加速度、加加速度的時間函數分別表示為式(2)、式(3)、式(4)。

在初始時刻時,系統具有初始位置和初始速度,則有式(5)、式(6)。

完成單軸插補的PVT控制模式,接下來需要為兩個驅動器添加同步信號(圖5)。為了保證兩個電機軸運動同步性,同步信號應該由同一個時鐘產生,而控制器是產生同步信號的最佳選擇。為了保證雙軸同步插補運動順暢運行,驅動器緩存中應至少放置兩個未執行的位置點,并且隨時向控制器反饋緩存中位置點的個數以及位置點執行情況。
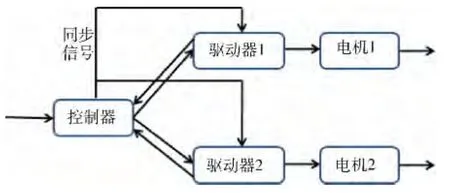
圖5 雙軸同步插補控制示意圖
給定兩個電機軸同步插補的位置點(P11,P21),(P12,P22),(P13,P23),(P14,P24)……,位置點之間的運行,采用PVT插補模式,為了保障插補效果,每個插補周期平均為50ms。最后,發送同步信號,間隔500ms,則兩個電機軸在同步信號的控制下,進行雙軸同步插補,可以運行出任意形態曲線,更準確的獲取地下空間形態。
3 礦山環境實際應用
以雙軸同步插補為基礎的地下空間掃描方式,已經應用在BLSS-PE礦用三維激光掃描測量系統中,并進行了大量的現場實驗,且取得了良好的掃描效果。例如在某礦山的-520中斷,選取了一個通風條件良好、粉塵濃度較小的采空區,進行了三維激光掃描,現場測試過程如圖6所示。

圖6 現場測試圖
礦山應用掃描效果如圖7所示。圖7(a)和圖圖7(b)是同一個采空區的不同視角。由圖7可知,這個采空區的掃描點云外形輪廓清晰、且分布均勻。在這個基礎之上,測量人員可以借助后期處理軟件,進行出礦量或者填充量的體積計算、剖切面提取、地下空間形態測繪、爆破效果評估、采空區穩定性評估、殘礦量分析評價等工作[5]。

圖7 地下空間掃描效果圖
4 結論
BLSS-PE礦用三維激光掃描測量系統在地下空間探測方面應用日益廣泛,在該系統中應用的雙軸同步插補算法,可以使主激光器在地下空間劃出任意形態的曲線,進而使掃描系統可以更準確的獲取地下空間形態。在礦山環境的大量實驗表明,該算法可以有效提高掃描空間分辨率,同時具有很強的適用性。
[1] 陳凱,楊小聰,張達.采空區三維激光掃描變形監測系統[J].礦冶,2012,21(1):60-63.
[2] 陳先鋒,舒志兵,趙凱英.基于PMSM伺服系統的數學模型及其性能分析[J].機械與電子,2005,145(1):41-44.
[3] 蓋榮麗,王允森,孫一蘭,等.樣條曲線插補方法綜述[J].小型微型計算機系統,2012,12(12):2744-2748.
[4] 舒志兵,嚴彩忠.PVT插補及位置伺服變加速度處理[J].控制技術,2007(26):86-88.
[5] 過江,古德生,羅周全.金屬礦山采空區3D激光探測新技術[J].礦冶工程,2006,26(5):16-19.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
