大型水輪發電機組動平衡測試
2014-03-16 11:02:37王斌
云南電力技術 2014年2期
關鍵詞:振動
王斌
(云南電力技術有限責任公司,昆明 650217)
大型水輪發電機組動平衡測試
王斌
(云南電力技術有限責任公司,昆明 650217)
介紹水輪發電機組動平衡的一次試重法具有拆裝工作量少、占用機組試運行直線工期短的特點,通過動平衡的一次試重法對魯地拉360 MW水輪發電機組進行動平衡試驗減少了機組的振動和擺度。
水輪發電機組;一次試重法;振動
1 前言
隨著我國水電機組設計、制造水平的不斷提高,各類大型水電機組不斷投運。這些大型水輪發電機組在運行中往往由于振動、擺度偏大或者超標,破壞機組的各個部件,嚴重影響水輪發電機組壽命,它們運行的穩定性直接影響到整個水輪發電機組的安全運行。水輪發電機組的動平衡試驗是減少機組振動、擺度的一個重要方法;對機組的安全穩定運行具有十分重要的作用,它能夠很好地解決機組的質量不平衡,同時對磁拉力不平衡也有一定的改善作用,研究大型水輪機組的動平衡試驗對機組安全穩定運行有重要意義。
2 一次試重法
動平衡是在剛性轉子雙面上調整質量分布以保證轉子剩余的動不平衡量在規定范圍內的過程。
三次試重法是分三次將試驗重荷分別固定在三個互成120°的圓周上,再計算出配重方位及重量;而一次試重法[1]是在測量振動、擺度的幅值時,同時測量振動的相位,減少了拆裝工作量。
2.1 動平衡配重的相位
振動的時域曲線 (即振動的波形圖)的測量記錄用振動測試系統記錄,同時裝設同步信號裝置 (即鍵相),使轉子每轉到此處時發出同步信號,由振動測試系統記錄下來,并定義該點為轉子的零度方位。在機組啟動后,在相同轉速、相同工況下測得兩同步信號之間的相位差為360°,可按比例測算出波峰時的相位角 α(即配重位置);測得波峰和波谷的差值A為振動值 (雙邊振幅),振動的時域曲線見圖1。

圖1 振動的時域曲線圖
2.2 動平衡配重的大小
按式 (1)進行初算試重量,并根據具體情況分析確定準確的試重大小:
式中:
P—試重量 (kg)
G—轉子重量 (kg)
n—動平衡試驗時機組轉速 (r/min) r—試重半徑 (m)
3 試驗方案
3.1 測試系統
振動測試系統[2]是利用傳感器將機組各部位振動量變化轉化為電量變化,經動態信號儀轉化后用分析軟件進行相應處理。本次采用的動態信號測試分析系統可直接與位移傳感器連接,對不同類型傳感器輸入不同的靈敏度,并具有跟蹤濾波功能,可測量振動通頻值、轉頻值。基于快速傅里葉變換原理,該測試分析系統對輸入的模擬信號進行抗混濾波及防泄漏處理,經模數轉換等初步處理后,按不同要求對信號進行時域分析、頻域分析和幅值域分析等,并可將選定的曲線對應的數據另存為文本文件、數據庫文件和位圖文件,測試系統見圖2。

圖2 測試系統示意圖
3.2 測點布置
試驗測點布置如下:上導擺度、下導擺度、上機架振動、下機架振動等多個層面上,每個層面在+X、+Y方向各裝一只,注意兩個振動、擺度傳感器盡可能安裝成90°,各層面同一方向的傳感器應盡可能安裝在一個截面上,這樣綜合分析相位時不會產生偏差。鍵相傳感器安裝在+X方向,這個方向的傳感器作為主分析用,另一個方向傳感器作為參考,與主傳感器的相位相差90°,其中擺度和鍵相為電渦流傳感器,振動為低頻振動傳感器。
4 動平衡實例
某水電站裝有6臺360 MW機組,總裝機容量為2160 MW,多年平均發電量99.57億kW· h,年利用小時4610 h。現已2#機組投產動平衡為例,介紹動平衡試驗。
為了了解機組振動。擺度狀況,分析機組振動原因,進行了變轉速試驗,機組振動擺度值見表1(文中所有振動、擺度值均為轉頻值)。

表1 機組的變轉速試驗數據
表1試驗數據測點振動與擺度值偏大,且隨轉速升高而明顯增大,上機架振動在額定轉速時達到86 μm,并且隨運行時間增加還有上升趨勢,機組存在機械不平衡。從圖3可以看出機組振動、擺度值主要以轉頻分量為主。
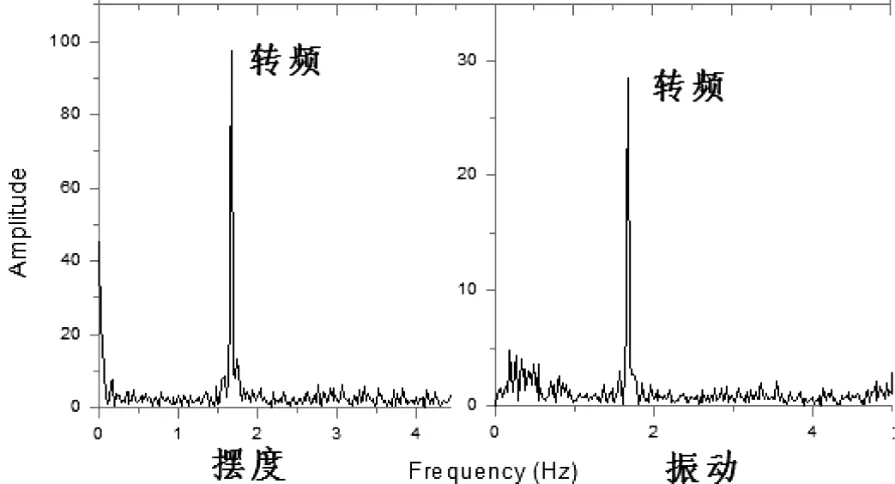
圖3 配重前額定轉速振擺頻譜分析
動平衡試驗配重以上機架振動相位為參考,考慮上機架振動、上導擺度較大,下機架振動、下導擺度較小,故在鍵相逆轉向的210°處上端面加重120 kg、下端面加重40 kg,比較配重前空轉與第一次配重空轉數據,配重有明顯效果,但考慮1#機組配重后擺度影響系數1kg/μm,該機組未達到預期效果;同時考慮鍵相與振動傳感器為不同類型,可能存在相位偏差,決定將參考相位改為上導擺度傳感器,與鍵相保持為同類型,將上端面120 kg配重塊移至270°,比較配重前空轉與第二次配重空轉數據,振動、擺度數據得到優化,達到預期效果,從配重后數據看,上導擺度值還可以繼續減小,故繼續在鍵相逆轉向的270°處上端面加重30 kg,第三次配重空轉測試數據見表4,并從圖4可以看出轉頻成分已經明顯減少,決定加勵磁后再做決定是否繼續配重,加勵磁測試數據。
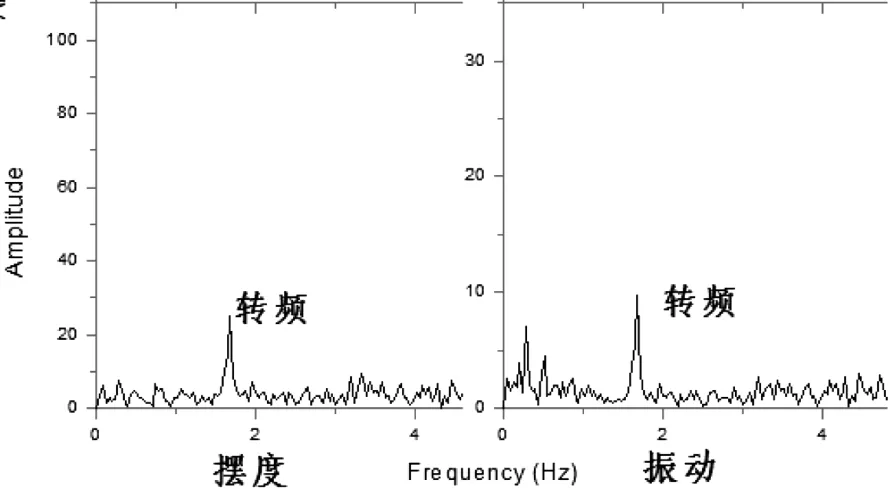
圖4 第三次配重額定轉速振擺頻譜分析
從空載數據看,空載后振動、擺度值明顯增大。故以上導擺度相位為參考,在鍵相逆轉向的220°處上端面加重70 kg、下端面加重50 kg,第四次配重后上導擺度、下導擺度、上機架振動、下機架振動無論在空轉還是空載狀態下都出現了下降,考慮到第四次配重后空轉已經比第三次增加,繼續減少空載振動、擺度值將會增大空轉值,配重到此結束,并且振動、擺度值遠優于國標。
5 結束語
1)在動平衡試驗過程中要注意傳感器的布置和使用。鍵相信號和參考相位傳感器一定要選擇同一類型傳感器,并建議選擇精度高的電渦流傳感器。
2)動平衡一次試重法具有拆裝工作量少、占用機組試運行的直線工期短的特點,對電站具有現實意義。
3)試驗證明機組動平衡不僅可以消除轉子質量不平衡,同時也可以消除部分磁拉力不平衡。
[1]王玲花.水輪發電機組振動與分析 [M].鄭州:黃河水利出版社,2011.
[2]狄長安,陳捷,賈云飛,等.工程測試技術 [M].北京:清華大學出版社,2008.
Analysis of Dynamic Balance Test on Large Hydrogenerator
One trial weight method of dynamic balance test for hydrogenerator can reduce workload of installation and reinstallation, shorten occupancy period of the unit commissioning linear characteristics,so it has practical significance to theplant.It reduces vibration and swing of a-360 MW-hydrogenerator in Ludila through one trial weight method.From this example,it fully demonstrates the importance of one trial weight method of dynamic balance tests for hydrogenerator.
hydrogenerator,one trial weight method,vibration
TV3
B
1006-7345(2014)02-0075-03
2013-11-13
王斌 (1988),男,工程師,云南電力技術有限責任公司,從事水電廠水機專業調試、試驗與故障診斷方面工作(e-mail) 425631679@qq.com。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00