基于分布式智能的船舶電力推進系統運行控制與管理策略研究
2014-03-20 02:23:40王亞楠韓堅王孟蓮
船電技術 2014年4期
王亞楠,韓堅,王孟蓮
(1. 海軍工程大學科研部,武漢430033;2. 武漢船用電力推進裝置研究所,武漢 430064)
0 引言
在現行的船舶上,電力系統和推進系統是平行的兩大系統,船舶綜合電力推進系統是在電力推進技術和高能新武器技術發展的基礎上將這兩大系統的綜合,使得電力系統和推進系統成為一個密不可分的整體。綜合電力推進系統以其操縱性好、艙室布置靈活、運行經濟性高、安靜性較好等諸多的優勢在船舶推進領域內得到了越來越廣泛的應用。如:英國從混合動力推進的23型護衛艦到全電力推進的45型驅逐艦、美國的DD(X)到DDG1000驅逐艦計劃等。為了保證電力推進系統的高效性和安全性,為使全艦能源得到充分合理利用、統籌調配艦上能源,滿足未來高能武器系統的需求,滿足網絡技術、信息技術、自動化技術要求,船舶綜合電力推進系統必須要配置自動化、智能化、網絡化、信息化的系統監控與管理,設計出高品質的監控系統。
船舶綜合電力推進監控系統不同于以往自動化電站、動力系統自控系統,也不同于機艙自動化,而是高層次綜合監控系統。它將在綜合電力推進系統中形成開放式模塊化結構,承擔整個系統的監測和控制、管理和保護。綜合電力推進系統的監控分為兩部分:發電系統的監控和管理;電力推進系統的監控和管理。兩者聯系緊密,又各有分工。本研究屬于電力推進監控系統基礎科研范疇。圖1表示了船舶電力推進系統的基本模型,監控系統對電力推進系統進行監控和管理。
為了對電力推進系統設備進行有效的監控與管理,本文對電力推進系統的運行控制與管理策略進行了研究。電力推進系統的運行管理策略是以支持自動化控制和指揮為目的,實現船舶電力推進控制系統自動化、網絡化、信息化的基礎。本文通過對船舶電力推進系統的運行、控制、操縱和管理策略的分析,歸納監控系統的功能與特性,在此基礎上提出船舶電力推進監控系統的體系結構,以解決滿足未來水面船舶電力推進監控系統的關鍵技術之一[1]。

圖1 船舶電力推進系統示意圖
1 分布式智能控制概述
分布式智能控制系統(DICS)是在計算機技術、通信技術、信息管理技術、集成電路技術的基礎上產生的一種控制方式。它是一個采用分層架構,由過程控制級和過程監控級組成的,以通信網絡為紐帶的多級微處理器系統。分布式網絡可以屏蔽各種現場總線控制網絡的差異,實現各現場總線控制網絡的透明互聯,使現場總線之間的通信及現場設備之間的通信暢通[2]。分布式智能控制系統的基本思想是分散控制、集中操作、分級管理、配置靈活,具有以下特點:
1)高可靠性。由于分布式智能系統將控制功能分散在各個微處理器上實現,系統結構采用容錯設計,因此在一個處理單元出現故障的情況下不會導致系統其它功能喪失。
2)開放性。分布式智能系統可以采用標準化、模塊化和系列化設計,系統中微處理器通過網絡連接,實現數據共享。當需要改變或擴充系統功能時,可將新的單元方便的接入網絡當中。
3)協調性。各微處理器和控制單元之間通過網絡傳輸各種數據,整個系統信息共享,協調工作,以完成控制系統的總體功能和優化處理,實現了空間上多地點操作。
4)可維護性。功能單一的控制單元,具有維護簡單、方便的特點,在某一個單元發生故障時,可以在不影響整個系統運行的情況下在線更換,迅速排除故障。
2 船舶電力推進系統控制功能和管理策略分析
對電力推進系統的監控與管理,主要是對電力推進系統的運行、維護進行監控,當能量需求發生變化時向發電系統提出能量申請或重載詢問,發電系統準備完畢后給推進系統應答,電力推進系統方能改變工況執行新任務;另一方面,當發電系統需要滿足高能武器需求時,或某發電機不能工作導致當前能量有限時,電力推進監控系統需要進行功率限制,根據現有能量改變推進的運行狀態使之匹配。為了降低易損性,電力推進監控系統硬件分解成獨立的控制子單元,每個控制子單元位于與受控設備相同的艙室內。通過分布式敷設的電纜和通信線纜,既減少了設備的布線,又使監控系統單元互相協同作用控制整個系統。每一個單元具有智能控制功能,用以控制隔離相關硬件,保證動力艙室設備能安全運行。船舶電力推進系統的控制功能是根據船舶航行需求和電力推進系統功能導出的,主要包括推進操縱與控制、監視與報警、保護、與PMS和動力定位系統的協調控制等。
2.1 控制功能分析
船舶電力推進系統的控制功能是根據船舶航行需求和電力推進系統功能導出的,主要包括推進操縱與執行控制、保護控制、監視與報警等。
1)推進操縱和執行控制功能
船舶采用電力推進系統可提供靈活的操縱功能:多種操縱方式和轉換邏輯、操縱順序、聯鎖關系。其中,操縱方式可分為遙控和本地操縱,遙控方式下又提供不同操縱部位(如集控室推進和駕駛室推進)的遙控;轉換邏輯一般認為本地的權限高于遙控,而遙控方式下集控室操縱權限又高于駕駛室,操縱權限的轉換權在權限高的部位,如本地操縱與遙控方式的轉換設置在本地、遙控時集控室推進與駕駛室推進的轉換權在集控室;操縱順序和聯鎖控制則提供使電力推進系統正常工作的必要條件,例如推進操車的條件是進行推進系統準備好,操縱部位的選擇具有唯一性等。
船舶電力推進監控系統的執行控制功能主要提供操縱系統與推進變壓器、推進變頻器、推進電動機和側推裝置及相關設備的協調控制,其接口深入到一次設備中,包括直接連接信號和來自通訊接口的數據信號。
2)監視與報警功能
監視與報警功能滿足可視化需求,以文本、圖形、圖表、聲光等形式告知用戶系統的運行狀態。也提供參數輸入接口和進行報警處理,提供人機接口。
3)保護控制功能
保護控制提供電力推進系統的安全,主要包括:聯鎖控制、防止誤操作的控制、故障報警的保護控制等。其基本原則是首先保護人員的安全,其次是船舶的安全,第三是本系統設備的安全。根據這個要求,也提供越控功能,如不能停船狀態下電力推進系統必須帶故障降額運行以保護船舶的安全。
2.2 主要外部接口
電力推進監控系統的主要外部接口包括與以下系統的接口:能量管理系統、動力定位系統和船舶其他信息化系統等。其中由于電力推進系統與能量管理系統、動力定位系統關系密切,必須提供協調控制,如推進系統的功率需求與變化都影響著能量管理系統,動力定位系統與推進操縱的協調控制;而基于船舶信息化的需要,電力推進監控系統應具備向外提供數據接口。
2.3 管理策略分析
雖然各型船舶電力推進系統的結構并不完全一致,但是從系統運行管理的角度去看,可以劃分為控制和管理兩個方面3。船舶電力推進系統運行機制如圖 2,操作人員在全船自動化架構與標準的全集成控制基礎上實現管理功能,并有分布式智能提供底層自主控制、基于關鍵內核軟件實現控制功能。
控制層基于底層自主控制,包括傳感、評估、執行和控制等關鍵內核。關鍵內核根據子系統的任務或安全性劃分關鍵控制內核,這些關鍵內核分別完成獨立的控制功能,具備自主式智能,關鍵內核可以組合以支持全系統的運行,各個關鍵內核之間盡量不共用功能模塊以保證控制的可靠性。管理層則根據評估結果實現決策支持,實現管理決策,操作指令交給控制層;評估狀態與結果提供給用戶,保證普通用戶,如船員既能夠及時有效獲得信息,又不致淹沒在數據海洋中,能夠提供良好的決策支持,隔斷誤操作的同時給出正確建議。因此,船舶電力推進系統的運行管理可根據這個層次來確定,監控系統應提供可靠、實時的控制與高效、準確的管理。相對于管理功能,電力推進系統的控制功能是關鍵,是船舶安全性的因素之一。圖中的關鍵內核設計是控制級主要構成,采用分布式智能技術可以實現系統可靠性指標。在控制操作中,控制系統必須提供:信號特征化、狀態檢修、故障響應排隊、維護系統完整等;自動化功能包括:智能傳感器裝置、可視化、自動化操車、緊急操作等。
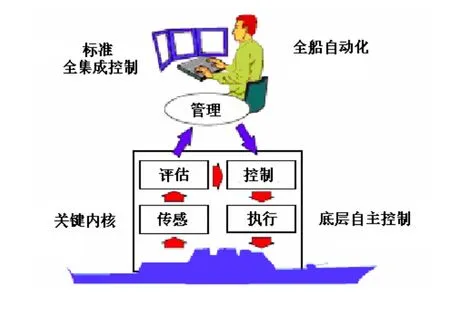
圖2 運行管理機制
3 基于分布式智能的監控系統體系結構
根據船舶電力推進系統運行管理策略的分析,其監控系統采用分層體系結構,劃分功能為管理系統管理和底層安全性關鍵功能而建立兩級不同的控制:控制級為專用組件級高可靠硬件及軟件控制為核心;管理級為普遍使用的計算環境。控制級采用分布式智能單元,并包含關鍵控制傳感和相應系統的接口。采用基于輸入/輸出接口和靈活控制的底層網絡,提供高可靠的傳感和執行;通過使用安裝在現地、并由管理軟件進行管理的控制核心單元提供可靠的控制,即采用分布式智能的關鍵內核來實施現地控制。管理網絡是一個帶寬網絡,處理單元使用商業成品(COTS)的軟件和硬件組成,管理網絡結點及系統具有持續更新的能力和支撐軟件,這些軟件安裝在高冗余且通用的商業成品計算機中。核心控制網絡層在關鍵數據上不依賴管理系統,那么控制層在管理系統由于損害、升級、故障和失效等原因發生變化或停機時,仍然繼續工作。可以說,控制系統的高可靠性是通過簡化、封裝的分布式智能得到的。綜上,基于分布式智能的監控系統體系結構是指由上位監控進行系統運行的管理和協調,區域控制功能由自治、不依賴管理層或其他區域的分布式智能控制網絡實現。網絡拓撲結構是由物理層、數據流和信息結構決定的。
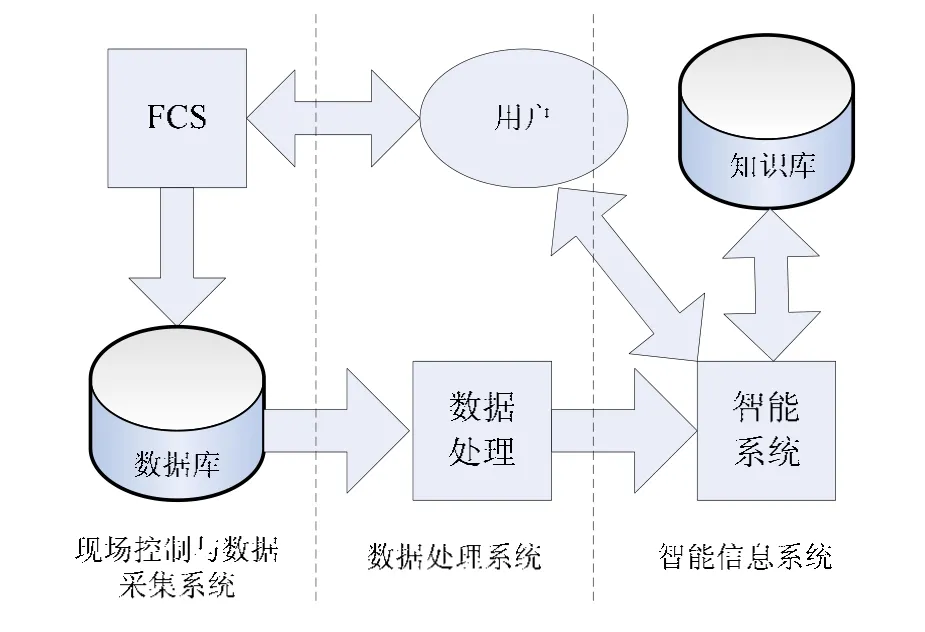
圖3 電力推進系統監控系統體系結構
根據電力推進系統控制和管理策略的研究,進行監控系統體系結構的設計。系統結構需要具有靈活性,能夠適應不同船舶電力推進系統的差異。如圖3所示,分為3個子系統:現場控制與數據采集,數據處理和智能信息處理。現場控制與數據采集系統采用現場總線控制(FCS)與數據庫結合的方案,完成用戶介入的現場控制、數據采集和存儲。數據處理系統通過數據分析,在原始數據中提取有價值的狀態信息,用于支持智能化系統。智能信息系統由智能系統與知識庫組成,利用智能技術,提取知識,并在知識庫的基礎上向用戶提供決策支持。
4 結束語
針對船舶電力推進系統,采用分級冗余網絡結構建立監控系統的通訊的基礎上,分布式智能組件的功能劃分和邊界條件是監控系統高效、可靠運行的關鍵。劃分的方法可以按照設備組成、設備處所、控制要求、操作位置、對外接口以及相應規范等,在減少智能組件之間的耦合關系的同時要實現信息流的暢通,必要時采用解析冗余技術使得各個區域的智能單元形成備份關系,達到系統的容錯控制性能最優。分布式智能組件為船舶電力推進監控系統的標準化設計提供了基礎。
[1] 黃仁和, 陳新傳. 電力推進監控技術. 船舶電力推進技術專題論文集. 中國造船工程學會軍船學術委員會, 2000: 162-166.
[2] 鄭文波 編著.控制網絡技術. 北京: 清華大學出版社,施普林格出版社, 2001.
[3] Damir Radan. Integrated control of marine electrical power systems [D]. Norwegian University of Science and Technology, 2008.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55