具有量化反饋的顧前顧后型車輛跟隨控制
2014-04-01 00:58:14王鵬張繼業(yè)宋鵬云陳彥秋
中南大學(xué)學(xué)報(bào)(自然科學(xué)版) 2014年11期
關(guān)鍵詞:系統(tǒng)
王鵬,張繼業(yè),宋鵬云,陳彥秋
(西南交通大學(xué) 牽引動力國家重點(diǎn)實(shí)驗(yàn)室,四川 成都,610031)
近年來,隨著計(jì)算機(jī)通信與網(wǎng)絡(luò)技術(shù)的發(fā)展,網(wǎng)絡(luò)傳輸信號對控制系統(tǒng)的影響引起了學(xué)者們的廣泛關(guān)注[1]。對于非自主車輛控制,每個(gè)車輛需要通過車隊(duì)內(nèi)的無線網(wǎng)絡(luò)來傳遞狀態(tài)信息[2],研究網(wǎng)絡(luò)因素對車輛跟隨控制器的影響是有必要的。量化誤差是網(wǎng)絡(luò)傳輸?shù)囊粋€(gè)重要因素。文獻(xiàn)[3]首先將量化誤差處理為系統(tǒng)狀態(tài)的不確定性,針對具有量化反饋的線性系統(tǒng),基于線性矩陣不等式方法設(shè)計(jì)了魯棒控制器。文獻(xiàn)[4]進(jìn)而將該方法引入到網(wǎng)絡(luò)傳輸環(huán)境下的車輛跟隨系統(tǒng),并設(shè)計(jì)了保性能/ H∞控制器。但是該方法是一種集中式控制器的設(shè)計(jì)方法,當(dāng)車輛數(shù)較多時(shí),求解的矩陣維數(shù)較高,計(jì)算量較大。因此,在此基礎(chǔ)上,文獻(xiàn)[5-6]應(yīng)用包含原理對跟隨誤差關(guān)聯(lián)系統(tǒng)進(jìn)行解耦,對解耦的子系統(tǒng)設(shè)計(jì)了分布式保性能控制器,并通過收縮擴(kuò)張條件將其轉(zhuǎn)換回原耦合系統(tǒng),降低了計(jì)算量,便于應(yīng)用。然而文獻(xiàn)[4-6]均要求得到線性化的車隊(duì)模型,而車輛本身的復(fù)雜性及路況的影響常常需要通過非線性模型來進(jìn)行描述。文獻(xiàn)[7-9]建立了車輛跟隨系統(tǒng)的非線性模型,并利用加權(quán)Lyapunov 函數(shù)法和傳遞函數(shù)法研究該系統(tǒng)的群穩(wěn)定性。但是該方法只適合于弱耦合的關(guān)聯(lián)系統(tǒng)。文獻(xiàn)[10-11]則利用向量Lyapunov函數(shù)法分析了車輛跟隨系統(tǒng)的群穩(wěn)定性,并設(shè)計(jì)了縱向跟隨滑模控制器,確保系統(tǒng)穩(wěn)定的控制器參數(shù)條件較文獻(xiàn)[7]得到較大改善。文獻(xiàn)[12-13]進(jìn)一步分析了隨機(jī)因素和脈沖因素對群穩(wěn)定性的影響,并研究相應(yīng)的車輛自動跟隨滑模控制律。這些系統(tǒng)模型均只考慮了前方車輛的信息,而沒有考慮后方車輛的信息。由于車輛間的設(shè)定間隔通常較小,為了進(jìn)一步確保車隊(duì)的安全行駛,每個(gè)跟隨車輛應(yīng)同時(shí)兼顧其前后車輛的狀態(tài)信息。因此,文獻(xiàn)[14-15]在文獻(xiàn)[10]的基礎(chǔ)上研究了一類考慮前后車輛信息的顧前顧后型車輛跟隨系統(tǒng),并給出了相應(yīng)的跟隨控制律,但沒有考慮網(wǎng)絡(luò)量化因素對控制系統(tǒng)的影響。因此,本文作者針對顧前顧后的車輛跟隨系統(tǒng)模型,研究了具有量化反饋的縱向跟隨控制器,設(shè)計(jì)方法計(jì)算量小,控制參數(shù)易于滿足群穩(wěn)定性條件。
1 系統(tǒng)建模及問題描述
1.1 系統(tǒng)模型
考慮圖1 所示自動化公路系統(tǒng)的車輛縱向編隊(duì),該編隊(duì)采用固定間隔跟隨策略,圖中Li(i=1,2, …)表示第i 輛車與第i-1 輛車之間設(shè)定的固定空間間隔,xi,vi,ai,Mi(i=0,1,2, …)分別表示第i 輛車的位移、速度、加速度和質(zhì)量,其中i=0 表示領(lǐng)頭車輛。
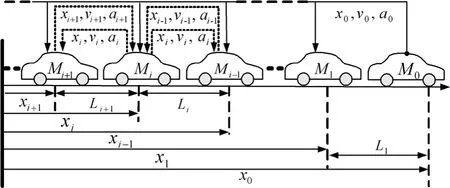
圖1 車輛縱向編隊(duì)Fig.1 Longitudinal vehicles in platoon
定義車隊(duì)中第i 輛車與第i-1 輛車的跟隨誤差

其中:t 表示時(shí)間。第i 輛車與領(lǐng)頭車輛之間的跟隨誤差為

根據(jù)車輛縱向動力學(xué)模型[2],第i 個(gè)跟隨車輛的縱向動力學(xué)行為可用如下非線性微分方程表示

1.2 問題描述
1.2.1 車隊(duì)信息反饋結(jié)構(gòu)
本文考慮無線網(wǎng)絡(luò)量化誤差在車隊(duì)信息傳輸中的影響,車隊(duì)信息反饋結(jié)構(gòu)如圖2 所示。
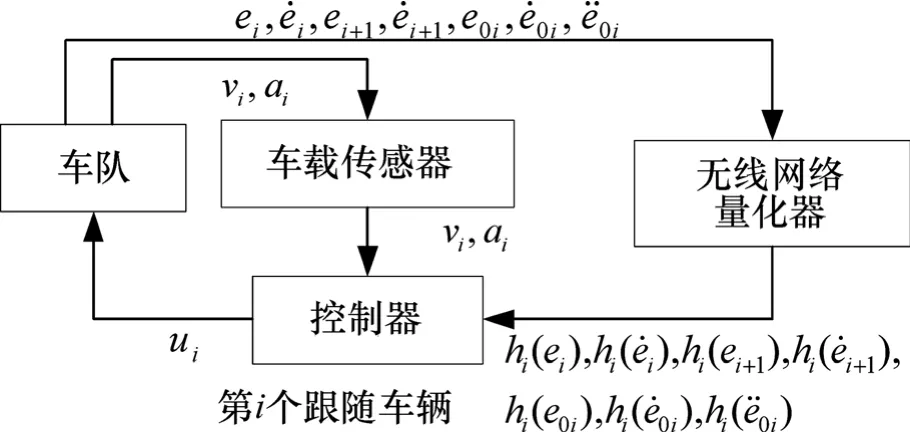
圖2 車隊(duì)狀態(tài)信息傳輸結(jié)構(gòu)Fig.2 Information structure of states of vehicles in platoon

1.2.2 網(wǎng)絡(luò)通信約束
對于車隊(duì)內(nèi)第i 輛跟隨車輛定義量化器[3]hi(?) ,i=1, 2, …, 每個(gè)hi(?)的量化級集合為

量化器函數(shù)hi(?)將每個(gè)變量值y 映射到Wi的一個(gè)元素,其映射關(guān)系定義為
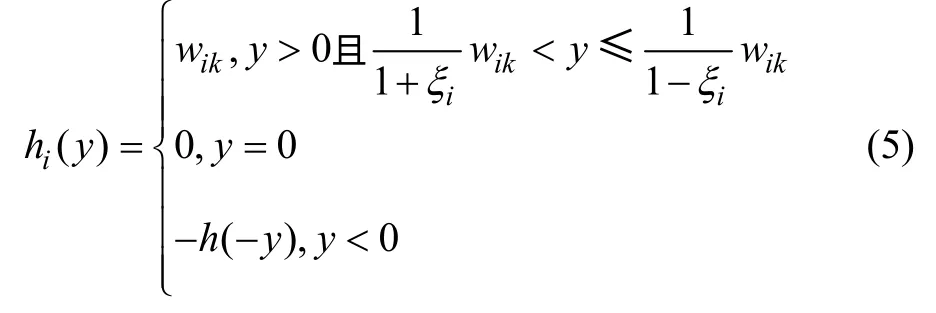
其中:ξi=(1-ρi) /(1+ρi)。
按照文獻(xiàn)[4]的處理方式,量化誤差作為系統(tǒng)狀態(tài)的不確定性,可得如下關(guān)系
因此,考慮量化器對信息傳輸?shù)挠绊懀刂坡蓪⒕哂腥缦滦问?/p>
1.2.3 控制器目標(biāo)
對于每個(gè)跟隨車輛,根據(jù)反饋的領(lǐng)頭車輛和相鄰前后車輛的狀態(tài)信息,尋找適當(dāng)?shù)目刂戚斎?8),滿足以下要求:
1) 車輛個(gè)體穩(wěn)定性:車隊(duì)內(nèi)每個(gè)跟隨車輛的跟隨誤差ei(t)漸近趨于0。
2 車輛縱向跟隨控制
對于自動化車輛跟隨系統(tǒng),車輛間的跟隨誤差可通過如下形式的關(guān)聯(lián)系統(tǒng)進(jìn)行描述。

其中, i∈N,yi∈Rn;fi:Rn×Rn×Rn→Rn,且fi(0,0,0)=0。假定系統(tǒng)(9)滿足零解的存在性和唯一性條件。

引入基于向量Lyapunov 函數(shù)方法得到的關(guān)聯(lián)大系統(tǒng)(9)的穩(wěn)定性引理,作為縱向跟隨控制器設(shè)計(jì)的基礎(chǔ)。
引理1[14]對于系統(tǒng)(9),若滿足以下條件,則其零解是群指數(shù)穩(wěn)定的。
(i)?mk,nk∈Rn,k=1,2,3,

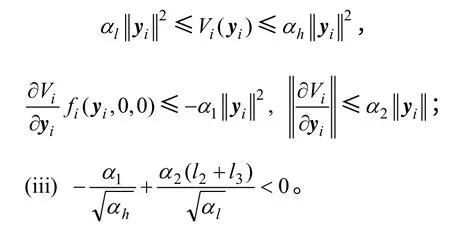
(ii) 對于系統(tǒng)y˙i=fi(yi,0,0)(i=1, 2, …),存在一個(gè)Lyapunov 函數(shù)Vi(yi)和正數(shù) αl, αh, α1, α2,使得
2.1 滑模控制器
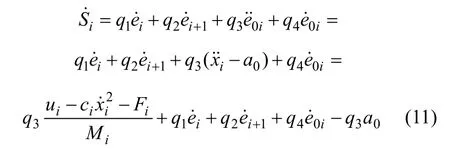
采用滑模控制方法設(shè)計(jì)系統(tǒng)控制器,定義切換函數(shù)

其中: q1,q2,q3和 q4是待定參數(shù)。對 Si求導(dǎo),并將式(3)代入得
為了使系統(tǒng)的狀態(tài)滿足滑動模態(tài)的可達(dá)條件,取非線性控制律

其中:sign 為符號函數(shù);λ>0為可選控制參數(shù)。由式(12)和(13)可得第i 個(gè)跟隨車輛的控制律為

2.2 穩(wěn)定性分析
2.2.1 滑動模態(tài)的可達(dá)性
下面證明車輛跟隨系統(tǒng)(3)在控制律(17)調(diào)節(jié)下的滑動模態(tài)漸近可達(dá)。取Lyapunov 函數(shù)

并令

則式(18)沿式(10)對時(shí)間求導(dǎo),并代入式(17)和(19)得

考慮式(6),由式(20)得
再考慮不等式(7),并代入式(14)和(15),由式(21)得
因此,系統(tǒng)的滑動模態(tài)是漸近可達(dá)的。
2.2.2 滑模運(yùn)動的穩(wěn)定性
通過確定控制參數(shù)q1,q2,q3和q4,使得t→∞時(shí),ei( t)→0。聯(lián)系式(10),由滑模面Si=0,i=1,2, …可得
因此,由式(23),ei(t)的滑模運(yùn)動方程為


可見:式(25)與式(9)的形式是一致的。
定理1 對于系統(tǒng)(25),若滿足

則系統(tǒng)(25)的零解是群指數(shù)穩(wěn)定的。
證明 由式(26)可知,q1,q3,q4同號,并且q2與q1,q3,q4異號,因此

容易驗(yàn)證?mk,nk∈R,k=1, 2, 3
即滿足引理1 的條件(i)。取Vi= ei2,則可取αl=1,αh=1,α1=2l1,α2=2,滿足引理1 的條件(ii);又由于q4/q3>0,可得l2+l3<l1,因此

滿足引理1 的條件(iii)。所以根據(jù)引理1,若系統(tǒng)(25)滿足條件(26),則零解是群指數(shù)穩(wěn)定的。證畢。
3 仿真分析
設(shè)車隊(duì)由1 輛領(lǐng)頭車輛和4 輛跟隨車輛組成,設(shè)置量化密度ρi=0.6,按照文獻(xiàn)[15]設(shè)車輛質(zhì)量均為1 000 kg,受到的摩擦力為200 N,空氣阻力系數(shù)為0.5 N·s2/m2,車間固定間隔為12 m;初始位移為x0(0)=100.0 m,x1(0)=90.0 m,x2(0)=79.5 m,x3(0)=68.5 m,x4(0)=57.0 m,即初始車輛間距誤差e1(0)=2.0 m,e2(0)=1.5 m,e3(0)=1.0 m,e4(0)=0.5 m;初始速度設(shè)為v0(0)=25.0 m/s ,v1(0)=24.5 m/s ,v2(0)=24.0 m/s ,v3(0)=23.5 m/s,v4(0)=23 m/s;初始加速度a1,a2,a3,a4均為0 m/s2,領(lǐng)頭車輛加速度的變化如下
控制律采用式(17),控制參數(shù)分別取q1=0.3,q2=-0.3,q3=0.3,q4=0.3,λ=0.2。容易驗(yàn)證q1,q2,q3和q4的設(shè)置滿足定理1 的穩(wěn)定條件。為了削弱控制輸入的顫振,將控制項(xiàng)(13)中的符號函數(shù)改為飽和函數(shù)

其中:
采用此種控制律雖然不能保證Si→0,但是能實(shí)現(xiàn)其一致最終有界。取Φi=0.2,i=1,2, …,仿真結(jié)果如圖3 和圖4 所示。
由圖3(a)可以看出:車輛之間保持著固定間隔,而圖3(b)和(c)則顯示車隊(duì)內(nèi)四輛跟隨車輛的速度和加速度能夠很快的逼近領(lǐng)頭車輛的速度和加速度。由圖4 可知:所有車輛的跟隨誤差在12 s 內(nèi)均已收斂到0,實(shí)現(xiàn)了車輛固定間距縱向跟隨的自動跟隨行駛策略。
圖5 給出了第4 輛跟隨車輛的跟隨誤差信息量化的結(jié)果,車輛跟隨誤差的真實(shí)值經(jīng)過對數(shù)量化器傳輸變成了一個(gè)離散量化值的集合。在控制器設(shè)計(jì)階段,應(yīng)該考慮對網(wǎng)絡(luò)傳輸量化誤差進(jìn)行補(bǔ)償,否則控制器的性能將因?yàn)樾畔鬏數(shù)牟粶?zhǔn)確而受到影響。
在不考慮車輛間信息傳輸?shù)牧炕`差,其余系統(tǒng)參數(shù)不變的情況下,按文獻(xiàn)[14]取控制律

與本文設(shè)計(jì)的控制器進(jìn)行比較。跟隨誤差的仿真結(jié)果見圖6。
由圖6 可知:4 輛跟隨車輛的跟隨誤差在接近40 s時(shí)才收斂到0。與圖5 對比可知:由于本文設(shè)計(jì)的控制律考慮了量化誤差的影響,車輛跟隨誤差具有更快的收斂速度。
為了進(jìn)一步驗(yàn)證本算法的有效性,在之前算例的基礎(chǔ)上,即車隊(duì)所有車輛已保持10 m 間隔,并且以25 m/s 的速度在路上行駛時(shí),領(lǐng)頭車輛突然在2 s 時(shí)間內(nèi)實(shí)現(xiàn)緊急制動并減速到0 m/s,其余跟隨車輛的仿真計(jì)算結(jié)果如圖7 所示。
由圖7(a)可知:所有跟隨車輛均在2 s 時(shí)間內(nèi)實(shí)現(xiàn)了制動,并減速到0 m/s。而圖7(b)則顯示車輛間的跟隨誤差也基本保持為0,沒有發(fā)生劇烈變化,避免了安全事故的發(fā)生。
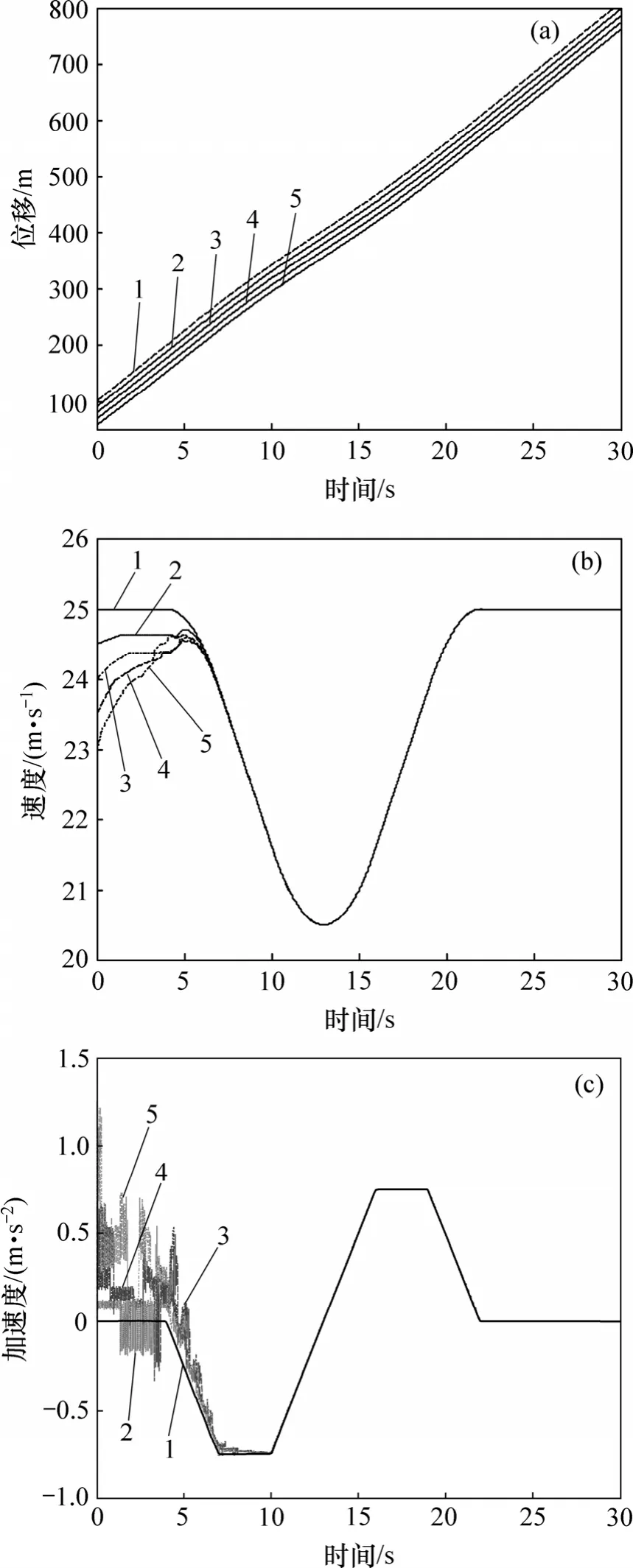
圖3 車隊(duì)車輛狀態(tài)Fig.3 States of vehicles in platoon
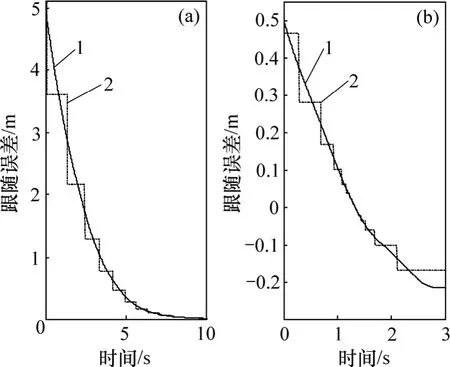
圖5 第4 輛跟隨車輛接收的跟隨誤差Fig.5 Following displacement errors received by the 4th following vehicle
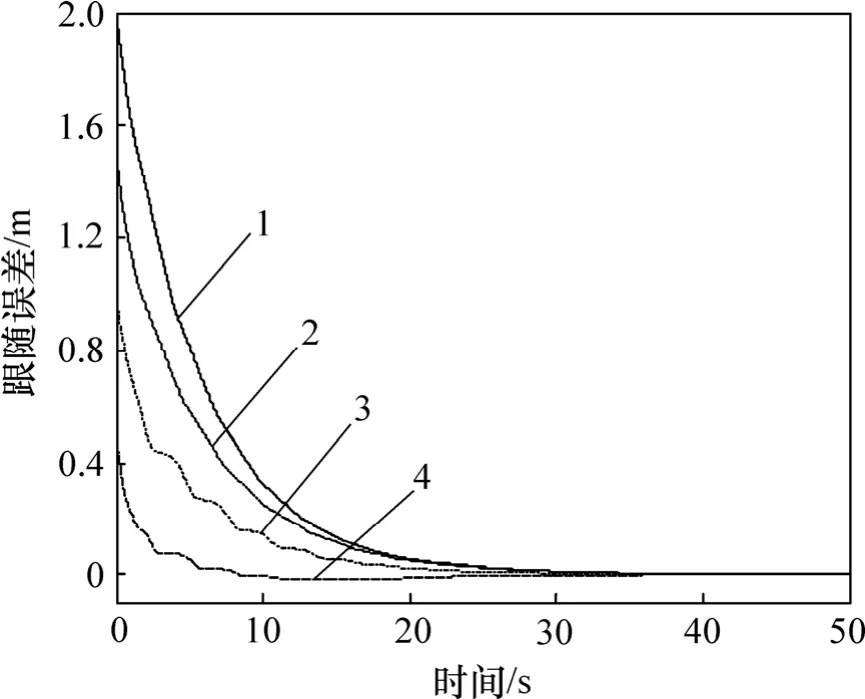
圖6 未考慮量化誤差時(shí)的跟隨誤差Fig.6 Following displacement errors without quantized error compensation
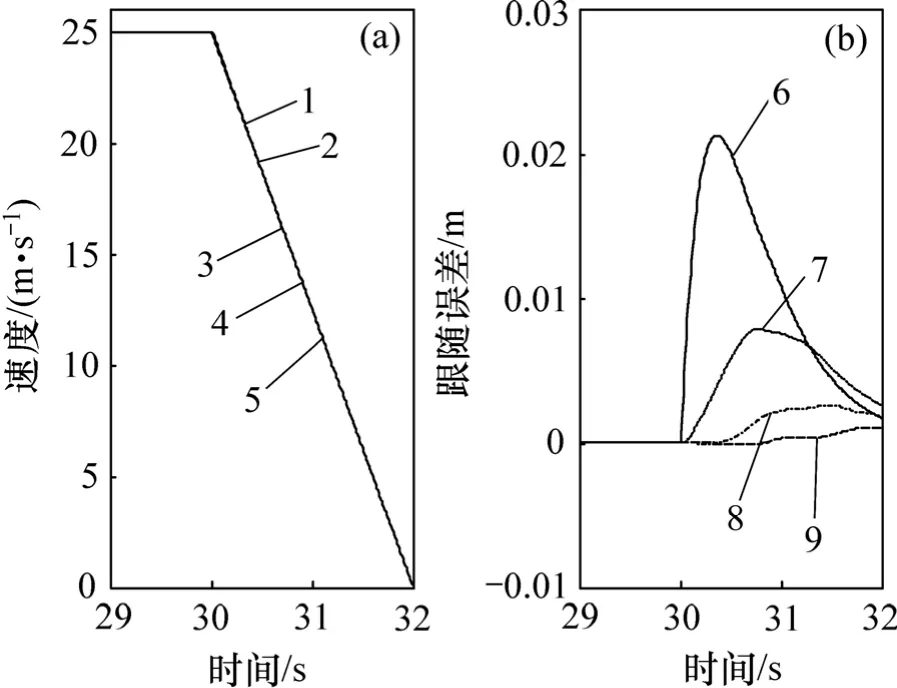
圖7 車隊(duì)車輛緊急制動Fig.7 Emergency breaking for vehicles in platoon
4 結(jié)論
1) 基于車輛非線性縱向動力學(xué)模型,采用固定距離跟隨策略,得到了對數(shù)量化器傳輸信道下的顧前顧后型車輛跟隨系統(tǒng)數(shù)學(xué)模型。
2) 將量化誤差處理為系統(tǒng)不確定性,應(yīng)用向量Lyapunov 函數(shù)法得出的關(guān)聯(lián)大系統(tǒng)群指數(shù)穩(wěn)定性判據(jù),研究了補(bǔ)償量化誤差的自動車輛跟隨系統(tǒng)的滑模控制器設(shè)計(jì)。該控制器是一種分布式控制器,計(jì)算量小,控制參數(shù)易于滿足群穩(wěn)定性條件。
3) 與不考慮量化誤差的控制方法相比,應(yīng)用本方法的車輛跟隨系統(tǒng),其跟隨誤差能夠更快地收斂到0。
[1] Lubomir B, Martin P. Decentralized control and communication[J]. Annual Reviews in Control, 2012, 36(1):1-10.
[2] Rajesh R.Vehicle dynamics and control[M].New York:Springer,2006:187-220.
[3] Fu M Y, Xie L H. The sector bound approach to quantized feedback control[J]. IEEE Transactions on Automatic Control,2005,50(11):1698-1711.
[4] Guo G, Wei Y. Hierarchical platoon control with heterogeneous information feedback[J]. IET Control Theory and Application,2011,5(15):1766-1781.
[5] 岳偉, 郭戈. 通訊網(wǎng)絡(luò)影響下自主車隊(duì)的控制[J]. 控制理論與應(yīng)用,2011,28(7):1041-1048.YUE Wei, GUO Ge. Control of autonomous platoon under networked communication effect[J]. Control Theory &Application,2011,28(7):1041-1048.
[6] 岳偉, 郭戈. 通信網(wǎng)絡(luò)影響下的自主車隊(duì)分散式控制[J]. 東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,41(S1):144-151.YUE Wei, GUO Ge. Decentralized control of autonomous platoon under networked communication effect[J]. Journal of Southeast University (Natural Science Edition), 2011, 41(S1):144-151.
[7] Swaroop D, Hedrick J K. String stability of interconnected systems[J]. IEEE Transaction Automatic Control, 1996, 41(3):349-357.
[8] Swaroop D, Hedrick J K, Choi S B.Direct adaptive longitudinal control of vehicle platoons[J]. IEEE Transactions on Vehicular Technology,2001,50(1):150-161.
[9] Eyre J, Yanakie D, Kanellakopoulos I. A simplified framework for string stability analysis of automated vehicle[J]. Vehicle System Dynamics,1998,30(5):375-405
[10] Zhang J Y, Yang Y R, Zheng J. String stability of infinite interconnected system[J]. Applied Mathematics and Mechanics,2000,21(7):791-796
[11] Zhang J Y, Suda Y, Iwasa T.Vector Liapunov function approach to longitudinal control of vehicles in a platoon[J]. JSME International Journal,2004,47(2):653-658.
[12] 施繼忠, 張繼業(yè), 徐曉惠. 時(shí)滯隨機(jī)關(guān)聯(lián)系統(tǒng)的群穩(wěn)定性[J].自動化學(xué)報(bào),2010,36(12):1744-1751.SHI Jizhong, ZHANG Jiye, XU Xiaohui. String stability of stochastic interconnected systems with time delays[J]. Acta Automatic Sinica,2010,36(12):1744-1751.
[13] 徐曉惠, 張繼業(yè), 張克躍. 脈沖變時(shí)滯車輛縱向跟隨系統(tǒng)的群指數(shù)穩(wěn)定性與控制[J]. 控制與決策,2012,27(9):1293-1300.XU Xiaohui, ZHANG Jiye, ZHANG Keyue. Exponential stability and control of vehicle longitudinal following system with impulsive effects and time-varying delays[J]. Control and Decision,2012 27(9):1293-1300.
[14] 任殿波, 張京明, 崔勝民, 等. 基于向量Lyapunov 函數(shù)方法的顧前顧后型車輛跟隨控制[J]. 中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2010,41(6):2195-2200.REN Dianbo, ZHANG Jingming, CUI Shengmin, et al. Vehicle following control using front and back information based on vector Lyapunov function[J].Journal of Central South University(Science and Technology),2010,41(6):2195-2200.
[15] 任殿波, 張策, 張繼業(yè). 考慮前后信息的車輛跟隨自適應(yīng)控制[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào),2011,43(6):76-80.REN Dianbo, ZHANG Ce, ZHANG Jiye. Vehicle following adaptive control using front and back information[J]. Journal of Harbin Institute of Technology,2011,43(6):76-80.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
