汽車防抱死系統電磁閥的階梯控制
2014-04-04 00:38:42祁富偉王彥波蔡健偉
吉林大學學報(工學版) 2014年4期
初 亮,祁富偉,王彥波,蔡健偉,陳 晨
(吉林大學汽車仿真與控制國家重點實驗室,長春130022)
電磁閥作為ABS系統中的主要執行元件,主要用于ABS增壓階段[1]。對電磁閥有線性控制和開關控制兩種控制方式。在線性控制中,增壓比較平穩,車輪較長時間處于穩定階段,因此線性閥在ABS系統中較為普遍[2]。但電磁閥線性控制的精度較差,可調增壓速度范圍較小,且響應較慢,不能滿足所有工況的要求[3]。而普通開關控制,雖然響應較快,但控制精度較差,因此,本文提出一種基于開關控制的階梯增壓方式,既能滿足響應速度要求,又有較高的控制精度。
1 電磁閥的階梯控制方式
對于圖1所示的電磁閥,如果采用普通的開關控制,增壓時電磁閥將完全打開,輪缸壓力增加較快,且由于閥芯兩端壓差處于變化之中,增壓速度不穩定,容易出現沖擊。因此,可以將增壓需求拆分為多個增壓和保壓階段,使平均增壓速度與所要求的增壓速度一致,即實現了階梯控制。每個階段的增壓過程中閥芯兩端的壓差變化較小,增壓速度較為穩定,改變每個階段增壓和保壓時間的比例,可以改變增壓速度。

圖1 電磁閥結構和受力分析Fig.1 Structure of valve and the forces acting on the valve
對于電磁閥的階梯控制,在所有增壓速度范圍內,都有較高的控制精度,因此電磁閥的開關控制方式在分離路面控制和EBD(Electric brakeforce distribution)控制中有廣泛的運用。
階梯控制的特點與普通開關控制相似,是在需要增壓時將進液閥完全打開,此時采用很小的PWM占空比,閥芯停留在升程最大位置。當需要減壓或保壓時,與線性控制相同,采用較大的PWM占空比,使閥芯完全關閉。
2 電磁閥特性和壓力模型
2.1 電磁閥的開關響應特性
電磁閥的運動部件為閥芯和動鐵,將其看作一個整體[4],其質量為mvs,因此其運動方程為

式中:mvs表示閥芯和動鐵的總質量;xvs表示閥芯位移;Fh表示所受液壓力的合力;Fs表示彈簧力;Ff表示摩擦力;Fv表示阻尼力;Fm表示電磁力。
在開關控制過程中,由于受到電磁閥電磁線圈感應的響應時間以及電磁閥運動部件慣性等影響,使得實際閥芯位移曲線不能及時跟隨脈沖控制波形[5-7],其電磁脈沖和閥芯位移響應如圖2所示。閥芯的運動分為閥芯開啟滯后、閥芯開啟運動、閥口完全打開、閥芯關閉滯后、閥芯關閉運動5個階段[4]。
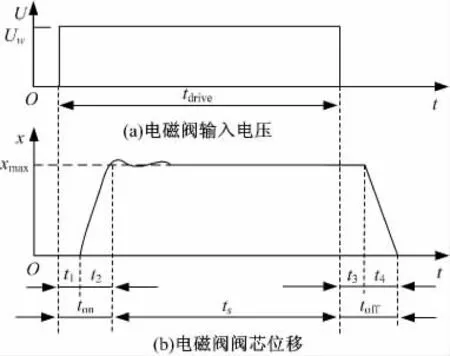
圖2 電磁閥開關響應曲線Fig.2 Switch response of solenoid valve
對于一個如圖2所示的增壓脈沖tdrive,其有效作用時間為teff=tdrive-ton+toff;取tresponse=ton-toff,則有效作用時間為:

式中:tresponse表示電磁閥開啟和關閉過程導致的實際作用時間與驅動作用時間的差,其大小與彈簧預緊力、彈簧剛度等電磁閥固定物理參數有關,在實際工作過程中還受到閥芯出入口壓差以及電磁力大小的影響,但在ABS工作范圍內,其大小基本不變。
2.2 輪缸的體積壓力特性
由于制動液中存在少量氣體,輪缸內包括密封圈等部件的變形也是非線性的,因此輪缸壓力和制動液體積呈非線性關系。如果將制動液剛度按固定值進行計算,會有較大的偏差。對于確定的制動輪缸,其壓力和體積關系雖然是非線性的,但卻是固定的[8-9]。
圖3為國內某一量產車型的汽車前軸盤式制動器的輪缸體積壓力特性示意圖。
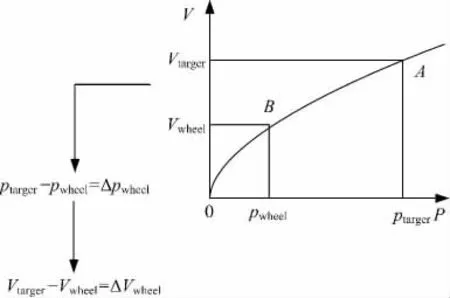
圖3 輪缸體積壓力特性Fig.3 Volume-pressure characteristic of wheel cylinder
3 電磁閥匹配過程的關鍵參數
假定車輪的當前壓力為pwheel,如圖3所示,根據車輛動態和車輪狀態計算出的車輪目標壓力為ptarget,因此需要的增壓幅度為:

根據輪缸的壓力體積特性得到需要的制動液體積為:

在每個增壓階段內,閥芯兩端的壓差變化較小,流量基本不變,因而需要的增壓時間為:

ttarget表示有效作用時間,根據式(2),需要的驅動時間為:

閥的流量為:

結合式(6)~(9),需要的驅動時間可以表示為:

上面的公式中:Cd表示節流孔流量系數;ρ表示制動液密度;Δpvalve表示閥口兩端壓差;d表示節流孔直徑。
4 階梯控制的控制方法
4.1 階梯控制的增壓過程
ABS控制過程中,進液閥完全打開時其增壓速度較快,在緊急制動時遠遠超過需求的增壓速度,且增壓速度并不固定,因而不可能采用普通的開關控制,在整個增壓階段將進液閥完全打開,一次性增壓到期望值。由于希望車輪在相對穩定的階段停留較長的時間,需要較小的增壓速度,可以采用分段增壓的方式,其計算過程如圖4所示,當增壓需求累計到一定門限pthreshold時,計算當前壓差情況下需要的增壓時間ttarget,然后經過響應時間tresponse修正后輸出增壓脈沖tdrive,在增壓脈沖tdrive作用下,制動輪缸壓力剛好增加到目標壓力ptarget,然后關閉電磁閥,執行保壓過程,直到下一個增壓需求累計超過門限。如此循環,使平均增壓速度與目標增壓速度相同。改變增壓脈沖的大小和保壓時間大小,即可調節增壓速度,一次階梯增壓過程如圖5所示。
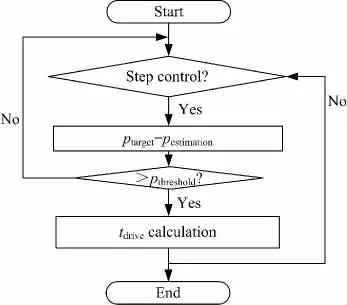
圖4 階梯增壓計算過程Fig.4 Process of control
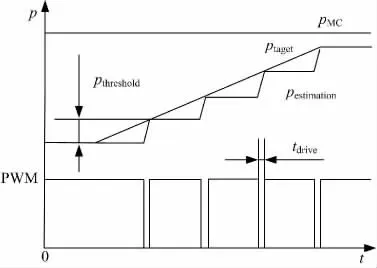
圖5 階梯控制方法示意圖Fig.5 Schematic diagram of stepped control
4.2 階梯門限的確定
如果增壓過程中階梯門限pthreshold過大,可能導致車輪處于增壓階段時間過長,由于該階段增壓速度很快,車輪容易出現較大的加速度,控制不平順,車輪很容易進入不穩定階段;此外,過大的階梯門限可能導致當累積增壓需求達不到增壓門限時,無法進行增壓,得不到所需要的控制效果。
相反,如果每個增壓脈沖增壓幅度太小,可能導致因響應時間所占增壓脈沖時間比例較大而使壓力估算不夠準確,控制精度很難滿足要求。此外,頻繁進行開關驅動會使ABS工作過程中的噪聲較大,閥芯磨損也比較嚴重,影響閥的壽命。
經反復試驗,采用0.4 MPa的階梯門限(即在每個增壓脈沖增壓0.4 MPa),既能夠得到較精確的控制,又能把工作噪聲控制在較小的范圍內。
5 試驗系統搭建和結果分析
結合文獻[10]的試驗臺架方法,采用國內某生產商自主開發的液壓調節單元HU(Hydraulic unit),在實車上搭建試驗臺。控制單元采用Micro AutoBox,Rapid Prototype作為驅動單元,MicroAutoBox的ADC通道作為采集通道,主要采集主缸壓力和輪缸壓力,使用便攜式電腦記錄數據。
基礎制動系和液壓調節單元構造示意圖如圖6所示,主缸壓力傳感器安裝在HU的入口處,輪缸壓力傳感器安裝在輪缸入口處。
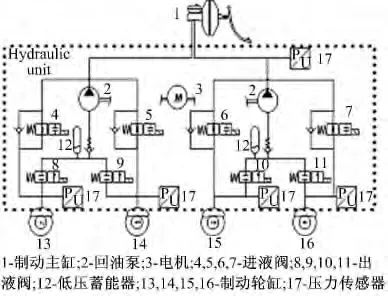
圖6 試驗臺架硬件示意圖Fig.6 Schematic diagram of test bench
5.1 關鍵參數的匹配
由于響應時間僅僅影響每個增壓過程的偏差,因此需要首先匹配節流孔直徑,試驗過程為:①使主缸和輪缸壓強同時達到13 MPa;②關閉需要進行匹配的進液閥,并打開對應的出液閥,使輪缸減壓至4 MPa,同時啟動電機,將多余的制動液抽回主缸;③關閉出液閥,保壓200 ms,停止電機;④采用12 MPa/s的速度增壓直至輪缸壓力與主缸壓力差小于1 MPa,試驗結束。
改變節流孔直徑d,重復上述試驗過程,試驗結果見圖7。
根據試驗結果可以看出,當孔徑為0.7 mm時,實際輪缸壓強和目標壓強吻合度較高,因而采用0.7 mm的孔徑進行壓力估算和進液閥驅動時間計算比較合理。
響應時間tresponse的匹配試驗過程與匹配節流孔直徑相同,采用固定的節流孔直徑d,不同的響應時間tresponse,試驗結果如圖8所示。
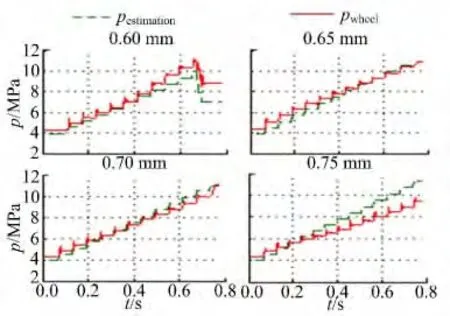
圖7 節流孔直徑d匹配試驗結果Fig.7 Result of orifice matching
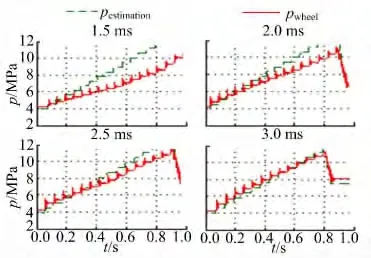
圖8 響應時間Tresponse匹配試驗結果Fig.8 Result of response time matching
根據試驗結果可以看出,采用3 ms的響應時間時,估算壓力和實際壓力有較高的吻合度,因而采用3 ms的響應時間進行估算能夠滿足控制要求。
5.2 階梯控制在分離路面的運用
將階梯控制方式運用于分離路面的控制算法,在分離路面進行緊急制動觸發ABS,制動過程允許駕駛員進行轉向角度修正,使車輛在整個制動過程中都位于分離路面。車輛參數如下:整車質量為1290 kg;車輪半徑為307 mm;質心至前軸距離為1053 mm;質心至后軸距離為1059 mm;前輪距為1505 mm;后輪距為1489 mm。電磁閥的主要參數如下:閥口孔徑為0.7 mm;閥座開口角度為π/2 rad;閥芯球頭直徑為1.2 mm;閥芯最大升程為0.2 mm;彈簧剛度為1.2 N/mm。
前軸左右車輪壓力如圖9所示。高附著系數一側車輪的輪缸壓力增速能夠被穩定控制在4 MPa/s左右。圖10為同一次制動下的車輛橫擺角度和制動強度,其中g=9.8 m/s2。從圖10可以看出,車輛橫擺角速度能夠較容易地控制在合理的范圍內,制動強度較大,能夠很好地滿足分離路面的控制要求。
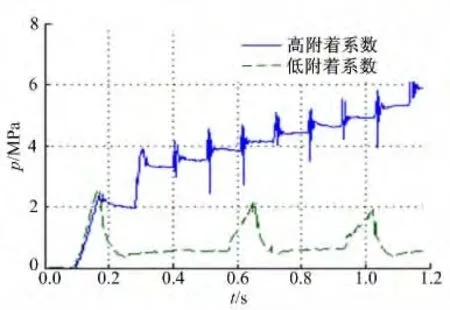
圖9 在分離路面制動時的前軸輪缸壓力Fig.9 Pressure of front wheel cylinder on split road
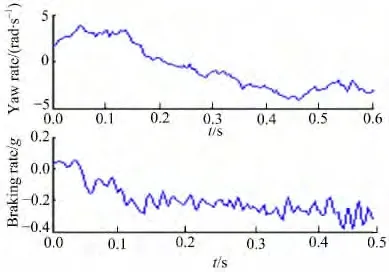
圖10 分離路面制動時的車輛橫擺角速度和制動強度Fig.10 Yaw rate and braking rate on split road
6 結 論
(1)采用節流孔直徑d和響應時間tresponse作為匹配參數,能夠充分體現電磁閥的響應特點,為電磁閥的匹配提供了理論依據。
(2)基于開關控制的階梯增壓方式控制精度高,噪聲較小,能夠彌補線性控制的不足。
(3)由于采用實車制動系統搭建的試驗臺,能夠最大程度地保持和實際車輛的一致性,使控制算法和參數有更高的可移植性。
(4)將階梯控制方法運用于控制算法,試驗結果表明,該控制方法簡單可靠,且能夠達到較高的精度,為ABS算法的開發和匹配奠定了堅實的基礎。
[1]周志立,徐斌.汽車ABS原理與結構[M].北京:機械工業出版社,2005.
[2]Takayuki Furuya.Solenoid valve control apparatus and brake control apparatus[P].USA Patent,US 6322166 B1.
[3]崔海峰.汽車ABS/ASR集成系統及輪缸壓力精細調節研究[D].北京:北京理工大學機械與車輛工程學院,2005.
Cui Hai-feng.Research on ABS/ASR integrated system and pressure fine regulation for motor vehicles[D].Beijing:Beijing Institute of Technology,School of Mechanical and Vehicular Engineering,2005.
[4]盧文博.基于滑移率的液壓ABS控制算法研究[D].長春:吉林大學汽車工程學院,2011.
Lu Wen-bo.Research of hydraulic ABS control algorithm based on slip ratio[D].Changchun:Jilin Universigy,College of Automotive Engineering,2011.
[5]黃維綱,王旭永,王顯正,等.高速電磁開關閥開關特性的機理研究[J].上海交通大學學報,1998,32(12):38-41.
Huang Wei-gang,Wang Xu-yong,Wang Xianzheng,et al.Investigation on the mechanism of switching characteristic of high-speed on-off solenoid valve[J].Journal of Shanghai Jiaotong University,1998,32(12):38-41.
[6]王會義,高博,宋健,等.汽車ABS電磁閥動作響應測試與分析[J].汽車工程,2002(1):29-31.
Wang Hui-yi,Gao Bo,Song Jian,et al.Measurement and analysis of response of electromagnetic valve in automotive hydraulic ABS[J].Automotive Engineering,2002(1):29-31.
[7]Qi Xue-le,Song Jian,Wang Hui-yi.Influence of hydraulic ABS parameters on solenoid valve dynamic response and braking effect[C]∥SAE Paper 2005-01-1590.
[8]丁能根,潘為民,方裕固.ABS壓力響應測試和壓力的精細調節[J].機械工程學報,2004,40(7):188-191.
Ding Neng-gen,Pan Wei-min,Fang Yu-gu.Measurement of hydraulic pressure response for ABS and fine regulation of pressure[J].Chinese Journal of Mechanical Engineering,2004,40(7):188-191.
[9]初亮,歐陽,張永生,等.ABS液壓控制系統壓力變化速率的機理研究[J].汽車技術,2010(9):19-23.
Chu Liang,Ou Yang,Zhang Yong-sheng,et al. Mechanism study of pressure change rate of ABS hydraulic control system[J].Automobile Technology,2010(9):19-23.
[10]劉溧.汽車ABS仿真試驗臺的開發與液壓系統動態特性的研究[D].長春:吉林工業大學,2000.
Liu Li.Research on ABS simulation and test bed developing and working performance of hydraulic system[D]. Changchun:Jilin University of Technology,2000.