輪式探測車被動自適應性與自由度關系分析
2014-06-06 03:06:18陶建國鄧宗全黎佳駿
哈爾濱工業大學學報 2014年3期
關鍵詞:系統
楊 飛,陶建國,鄧宗全,黎佳駿
(1.機器人技術與系統國家重點實驗室,150080 哈爾濱;2.哈爾濱工業大學機電工程學院,150001 哈爾濱)
輪式探測車被動自適應性與自由度關系分析
楊 飛1,2,陶建國1,2,鄧宗全1,2,黎佳駿1,2
(1.機器人技術與系統國家重點實驗室,150080 哈爾濱;2.哈爾濱工業大學機電工程學院,150001 哈爾濱)
為設計具有自適應性能的探測車,保證輪式探測車移動機構在行駛過程中車輪與地面接觸良好,研究自適應性能與單側懸架系統及其漫游車整體所需自由度之間的關系.給出自適應性的3種分類方法,分析自適應性能對漫游車的爬坡性能、車體穩定性能及能耗特性的影響;建立具有自適應性能的探測車單輪系統數學模型并得到此系統的自由度;分別建立包含兩輪、三輪及k個車輪的自適應懸架系統數學模型,分析并得到上述系統所需的自由度;分別建立在懸架對稱布置和四周布置兩種情況下的探測車自由度模型,并對一些具有代表性的被動自適應特性探測車自由度進行了統計和分析.研究結果表明:良好的自適應性是實現移動機構綜合性能的前提條件,具有自適應性的單側懸架系統與探測車整體所需自由度分別為1和3.該方法可為探測車懸架及車體系統構型綜合時自由度的確定提供指導.
探測車;被動自適應;輪式移動機構;自由度;懸架;構型綜合
隨著深空探測技術的發展,行星探測受到各個國家越來越多的關注,并掀起了新一輪深空探測熱潮.行星探測車是對行星表面進行實地勘探的重要工具,是搭載各類科學探測儀器的平臺[1].未來的空間探測任務要求探測車能在預先未知或非結構化的環境中去執行任務.輪式探測車具有結構簡單,質量輕,高效實用等優點,因此國內外行星探測車的研究以輪式為主[2-3],特別是在崎嶇地面上行駛的輪式行星探測車技術已經成為研究熱點.
輪式探測車行駛過程中,各車輪與地面良好接觸以保持均衡的牽引力是提高探測車綜合性能的重要前提,這種性能被稱為車輪對地面的自適應性.自適應理論應用極其廣泛,其分類方法也多種多樣.狹義地講,從系統對外界輸入有無反饋可將自適應分為3種類型.1)主動自適應:系統內部對外界環境的變化有反饋控制,使系統依據新輸入而呈現出一種新結構、狀態或功能,從控制角度講,其是一個閉環控制.美國卡內基-梅隆大學研制的流浪者“Nomad”[4],JPL 研制的 Nanorover等通過實時檢測探測車的位置姿態,采用機電控制主動調節探測車的運動,獲得最佳的行駛性能,均屬于主動自適應探測車.2)被動自適應:系統在運行過程中不會對外界環境的變化有反饋,自身的狀態也不會發生改變,是一種簡單的輸入輸出關系,從控制角度講,其是一個開環控制系統.美國噴氣推進實驗室(JPL)研制的“索杰納”以及MER(mars exploration rover)探測車[5],日本的Micro-5等[6]主要利用移動機構超靜定特性實現輪系對地面的自適應,達到平順車體、均衡牽引力的目的,均屬于被動自適應輪式探測車.3)主、被動混合自適應:主動和被動自適應的有機結合,既有傳感器和執行器保證相應的主動自適應控制,又有相應的被動自適應機構,如俄羅斯研制的Marskhold探測車既能被動適應地形又能主動適應地形,屬于混合自適應探測車[7].
探測車的自適應性與懸架的構型密切相關.被動自適應探測車雖只能適應一般復雜地形,但因其結構簡單,能耗小,控制簡單,可靠性高,因而在目前的行星探測中得到了廣泛應用.基于地面自適應能力的輪式探測車構型綜合能夠使綜合出的輪式探測車移動機構具有良好的地面自適應特性,從而保證探測車具有優異的運動學和動力學性能,但目前類似的研究文獻還很少.
本文通過分析自適應性對移動機構性能的影響,研究具有良好被動自適應能力輪式探測車移動機構與其自由度之間的關系,為探測車的構型綜合提供參考和借鑒.
1 被動自適應性與探測車性能關系
行星探測車的綜合性能可通過一些子性能得到反映,如爬坡性能、穩定性及能耗特性等[8].
1.1 爬坡性能
擁有良好自適應性能的探測車能保證每個車輪在爬越一定傾角的斜坡時與地面時刻接觸,保證良好的牽引性能,使爬坡過程順利進行.對于在行星上執行任務的探測車,探測車攜帶或能得到的能源有限,因此每個車輪電機能提供的功率也是一定的,則車輪能提供的最大驅動力矩為
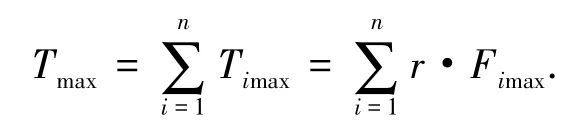
式中:Fimax為作用在第i個車輪上的最大切向力,n為車輪總數,r為車輪半徑,Tmax為全部車輪能提供的最大驅動力矩,Timax為每個車輪提供的最大驅動力矩.
如圖1所示,當探測車爬越一定傾角斜坡且處于臨界條件——所有車輪提供的驅動力矩恰好和車體重力沿斜坡的的阻力矩平衡時,若由于懸架等原因使某個車輪與地面脫離接觸,這時其他車輪受到的阻力矩就會相應增加.由于電機能輸出的驅動力矩有限,當驅動力矩小于阻力矩時就會導致探測車爬越斜坡失敗.
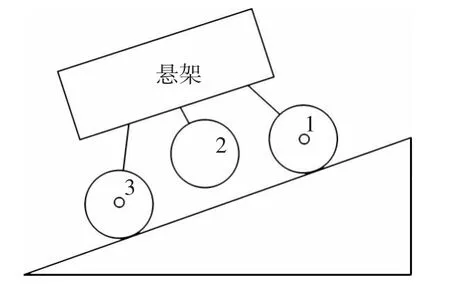
圖1 探測車爬越斜坡示意
1.2 車體穩定性
傾翻將造成探測車損壞,導致探測任務失敗.探測車穩定性主要指移動機構抵抗傾翻的能力.零力矩點(zero moment point,ZMP)理論是判斷系統穩定性的重要方法[9].ZMP是指系統上與地面的一個接觸點,其受到的地面反作用力繞該點的力矩分量在地面上的投影為0.根據ZMP理論,可將探測車行駛過程的穩定性表述為:若ZMP位于各車輪與地面接觸點形成的支撐多邊形之內,則探測車將不會發生傾翻.圖2為一探測車ZMP示意圖,P1~Pn為探測車n個車輪與地面的接觸點,車體ZMP位于這n個點形成的多邊形區域內.根據ZMP理論,在接觸點形成的多邊形區域內,穩定性與ZMP點所能移動的范圍呈正比關系.若某些車輪與地面脫離接觸從而使接觸點形成的多邊形面積減小,就會減小ZMP點的移動范圍,其穩定性就會相應地下降.圖2(b)中兩車輪與地面脫離,假設在多邊形中代表這兩車輪與地面的接觸點為P3和P4,則新形成的穩定區域就會比圖2(a)所示的區域減小,這時ZMP點能移動的范圍減小,車體的穩定性就會下降.因此車輪與地面時時接觸是保證車體穩定性的重要條件.
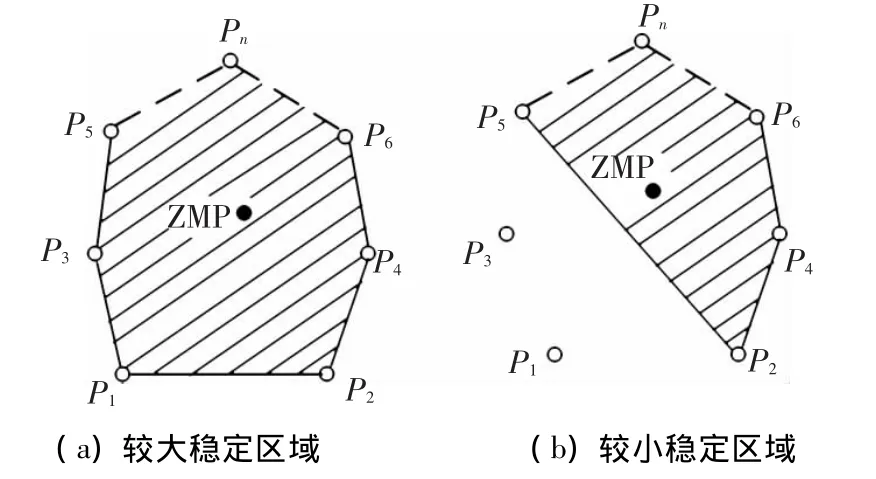
圖2 探測車零力矩點示意
1.3 能耗特性
影響移動系統能耗特性的直接因素有機械系統傳動效率、電機效率及車輪與地面的滑轉等.探測車在運動過程中姿態不斷發生變化,車輪載荷也不斷發生變化,會造成車輪滑轉率不同,車輪前進速度產生差異而造成能量的內部損耗.因此,車輪滑轉率對能耗有很大影響,可將其作為一個評價指標.滑轉率表示為[10]

式中:Sf為車輪實際行駛距離,S為車輪理論行駛距離.
當車輪與地面接觸減少或發生空轉時,都會使Sf減小甚至為0,這將導致車輪滑轉率增大,增大移動系統的能源消耗.因此,應保證車輪能很好地自適應行駛,使各輪重力分配均勻,避免車輪懸空現象發生,以減小車輪滑轉率,減少不必要的能耗.
2 被動自適應探測車所需自由度分析
2.1 被動自適應移動機構單輪系統自由度分析
在移動系統行駛的每一時刻,可將車輪與地面視為點接觸.在非結構化環境中,若不考慮主動轉向運動且兩邊車輪沒有速度差,將車輪與地面離散的接觸點連起來形成一條接觸曲線,則此接觸曲線為某一地形剖平面內的軌跡曲線,如圖3中曲線S1所示.
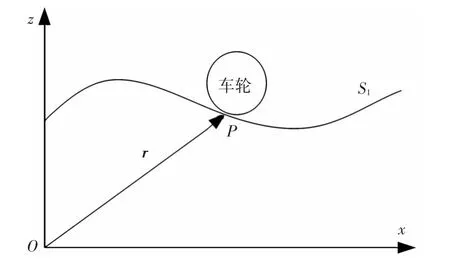
圖3 單輪系統運動示意圖
為使車輪對地面具有良好的自適應性能,則車輪應時刻與地面發生接觸,那么曲線S1是車輪在不同位置下的包絡線,r為S1的徑矢,設包絡曲線S1的方程為
且其上無奇點,即rx×rz≠0.因曲線S1是車輪在不同位置的包絡線,所以P點也是車輪輪廓線上的點,這時P點在曲線S1和車輪輪廓線上的切矢應相等,即

令S1=f(x,z),Δxi=Δxi-1+Δx,Δzi=Δzi-1+Δz,(i=1 ~ n),其中Δx、Δz為在相等的時間間隔內在x、z方向上的增量,那么弧線S1的偏導矢可以表示為
若將軌跡曲線在x和z兩個方向上進行分解,則相等的時間內在x方向上行駛的距離是相等的,即Δx=0.但由于起伏的地形,相等的Δx值對應不同的Δz值,因此

當車輪勻速行駛在起伏路面上時,主要適應z向地形變化即可,這時單輪系統僅需一個自由度.
2.2 被動自適應移動機構整體自由度分析
查閱相關文獻可發現,很多已經成功應用或正在研制當中的輪式探測車移動系統多為兩側或四周布置形式.兩側布置移動機構一般為懸架系統的左右對稱布置,如“索杰納”行星探測車;移動機構四周布置形式較復雜,其車輪-懸架系統與載荷平臺連接方式為鉸接或差動與鉸接的混合連接,如Micro-5為全鉸接形式,而文獻[11]所述探測車則為差動與鉸接的混合連接.
2.2.1 單側車輪-懸架系統自由度分析
圖4所示為車輪連接的基本單元——兩個車輪連接的情況.
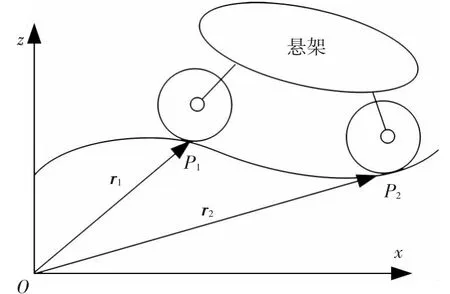
圖4 車輪-懸架連接單元示意
兩車輪分別與懸架連接,但具體連接由于不同的探測車懸架結構不同,在此不具體確定.懸架的作用是保證兩車輪滿足被動自適應性所需的自由度.設兩車輪當前位置與地面接觸點分別為P1、P2,對應的徑矢分別為 r1、r2.
若車輪有高度差,徑矢r1,r2在z向的分量有如下兩種關系:

1)當|r1z|>|r2z|,表明兩車輪在z向有高度差,如圖5(a)所示.當車體沿箭頭方向行駛且把車輪2的z分量視為參考值時,可假設移動機構正在對高度為h=|r1z|-|r2z|的障礙進行越障.對于此時的車輪-懸架系統,可將其認為是一個被動的分時自適應系統,即在某一時刻只有一個車輪的相對高度發生了變化,而另一車輪保持原狀態不變,則兩車輪之間只需一個相對自由度來適應z向的變化,即懸架系統需提供一個自由度.
2)當|r2z|>|r1z|,其越障如圖5(b)所示.箭頭指示探測車行駛方向,障礙高度h=|r2z|-|r1z|,分析過程與1)類似,即懸架系統只需提供一個自由度.
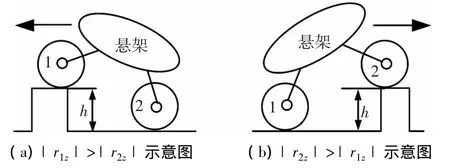
圖5 兩車輪相對高度變化示意
由上述分析可知,基本的車輪-懸架單元具有被動自適應性的前提是此系統具有一個自由度.大多數探測車單側懸架連接的車輪數一般≥2,因此有必要對車輪數大于兩個的車輪-懸架系統自由度進行研究.
設A、B、C、D、E代表單側車輪 -懸架系統連接的5個車輪,且令A∩B=1表示車輪A與B之間有一相對自由度,其余類推.若車輪 -懸架系統具有被動自適應性,則各車輪之間有相對的自由度,可自動適應地形起伏變化.以A為例,若其被動自適應性不受其他車輪干涉,即在運動過程車輪A與其他車輪之間都有相對的自由度,即
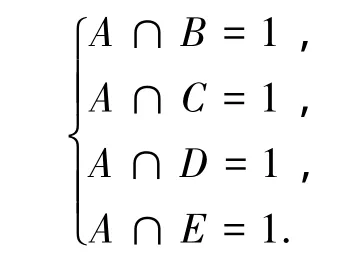
由分析可知,當車輪 -懸架系統為兩輪基本單元時,可保證每一時刻兩輪之間總有相對的自由度,且此系統的自由度為1.因車輪A要同時與車輪B、C、D、E在運動時有相對的自由度,則A可與B、C、D、E組成兩輪基本單元系統,即
式中:F=B∪C∪D∪E,車輪B、C、D、E組成一個系統F.
則車輪A與車輪系統F組成的車輪-懸架系統自由度為1.對于車輪B,因要具有被動自適應能力,除了A∩B=1,B∈F外,還必須滿足
則同理B∩G=1.
式中:G=C∪D∪E,車輪C、D、E組成一個系統G,且 G ? F.
車輪B與新系統G為具有被動自適應性能的基本兩輪單元系統,此時系統的自由度為1.同理,車輪C、D、E也可以做類似的分析,得出類似的結論.
分析了可分解為兩輪基本單元的車輪-懸架系統自由度為1的充分性后,下面分析其必要性,即從最基本的兩輪單元系統來分析整體系統的自由度.圖6為單側車輪-懸架系統基本兩輪單元連接示意圖.設有 n個車輪,分別為1,2,…,n,各兩輪基本單元通過轉動副 J1,J2,…,Jn-1連接.因其為平面機構連接,可用下式計算其自由度:

式中:F為平面機構的自由度,n為總的構件數,包括一個地面,p為平面低副數目,設車輪與地面間為純滾動,即視為低副.
輪式漫游車懸架有不同的構型,懸架在空間上有不同的布置形式,如兩側對稱式、四周均布式、三點鉸接式等等.雖然布置方式不同,但從目前已有的漫游車布置方式來看,每側懸架與載荷平臺都為點連接即各個獨立的懸架都只有一個輸出,要求懸架能提供一個輸出自由度.如圖6(a)、(b)所示分別為連接兩個車輪與3個車輪的懸架示意圖,懸架的具體結構及連接方式未知.
若要使綜合出的懸架對崎嶇地面具有被動自適應性,對于兩輪或三輪懸架來說,其必須滿足下列條件:
1)懸架在任意工況下都必須滿足因崎嶇地面導致的車輪對懸架的輸入自由度;
2)在任意工況下,懸架的輸出自由度不應被干涉,即懸架必須滿足對載荷平臺的這個輸出自由度.
綜上,對于具有被動自適應性能的兩輪懸架而言,其必須時刻能提供3個自由度.因懸架為平面機構且與載荷平臺為點連接,不存在作為機架的桿件,因此其桿件數和運動副數滿足下式:

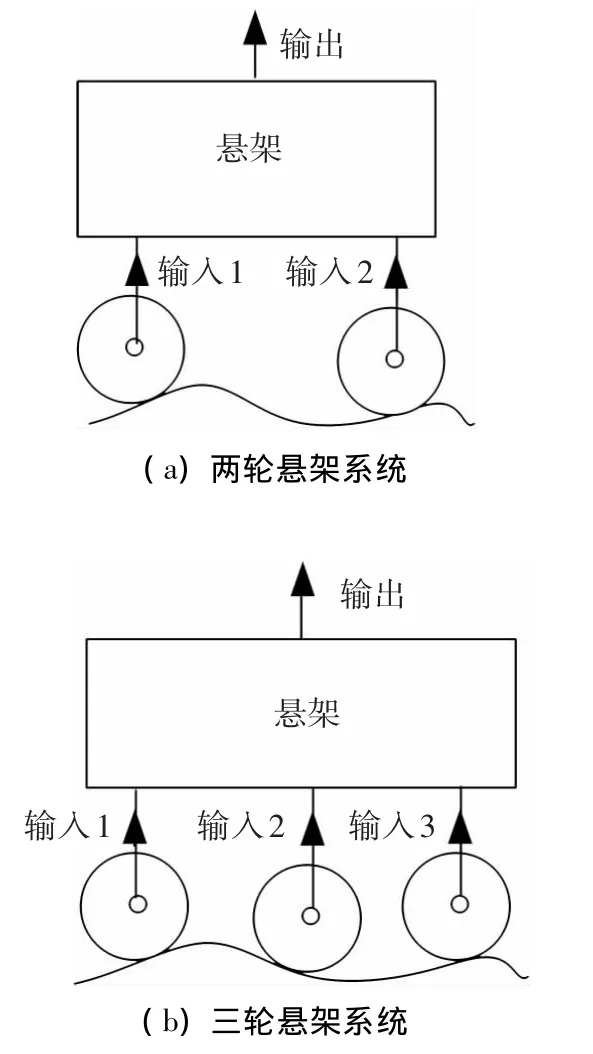
圖6 雙輪及三輪單側懸架系統
同理,對于單側三輪懸架,其桿件數和運動副數滿足下式:

兩輪懸架-車輪系統中,在計算整體系統的自由度時除懸架所含的桿件和運動副外,還應包括車輪、地面及其之間相互連接的運動副,即還應加上n1=3的桿件及p1=4的平面低副.但應注意的是在車輪-懸架系統中,地面是不動的,被當作機架看待,由式(1)可得整體系統的自由度為

同上,在三輪懸架-車輪系統中,除懸架所含的桿件和運動副外,還應加上n1=4的桿件及p1=6的平面低副,結合式(2)可得整體車輪-懸架系統的自由度為

同理,對于單側有k個車輪的懸架系統,其單側懸架須提供k+1個自由度,即

當分析車輪-懸架系統的自由度時,還應加上n1=k+1的桿件及p1=2k的平面低副,則整體系統的自由度為

由以上分析可知,對于一個具有被動自適應性能的車輪-懸架系統,為保證每時每刻車輪之間都有相對的自由度來適應地形的變化,無論連接方式多么復雜,具有被動自適應性能的車輪-懸架系統所需自由度為1.
2.2.2 移動系統整體自由度
本文所述探測車系統自由度是其被動適應地形所具有的自由度,不包括由于主動控制而引入的自由度,例如車輪轉向電機引起的轉向自由度.對于移動系統自由度,不同文獻有不同計算方法,如在文獻[8]、[12]中移動系統自由度為所有運動副自由度的代數和,這就造成了不同車型根據不同方法計算后其自由度有差異.從構型角度考慮,為尋找其自由度的規律,應以普遍的計算機構自由度的方法來計算整車自由度.
假設移動系統行駛在平坦地面上且車輪與地面之間為純滾動,這時各懸架與載荷平臺的鉸接軸為輸入,載荷平臺的位姿變化為輸出.當各鉸接軸之間無相對高度變化時,移動系統有最少的自由度,即由于車輪轉速不同而引起的車體繞垂直于地面坐標軸的轉動以及沿地面的兩個平動,共3個自由度.
移動系統實際結構及連接方式復雜多樣,但其系統自由度可通過下式計算[13]:

式中:fi為第i個運動副的自由度數;N為運動副數;λ為閉合約束數,對于空間封閉鏈,λ=6,對于平面封閉鏈,λ=3;L為封閉鏈數目.
2.2.2.1 兩側布置移動系統自由度分析
從目前已有的探測車移動系統可發現,兩側布置的車輪-懸架系統與載荷平臺一般通過差動裝置連接,如此可很好地平衡兩側懸架輸入的不同俯仰角對載荷平臺的影響.差動裝置輸出的相對自由度為1,可表達為

設移動系統由左右對稱的車輪-懸架系統與載荷平臺組成,由前述分析可知,具有被動自適應車輪-懸架系統自由度為1,即
則移動系統的自由度為
由此可見,單側車輪-懸架系統自由度為1,左右對稱與載荷平臺差動連接的移動系統自由度為3.構型綜合時,選擇車輪-懸架系統自由度為1,移動系統自由度為3,如此在同等條件下可減少所用桿件數量,從而減少系統復雜性及車體質量,這可以從已經研發出的大多數探測車上得到體現.
2.2.2.2 四周布置移動系統自由度分析
四周布置移動系統車輪-懸架系統與載荷平臺的連接具有結構和數量不規律的特性,這樣可使移動系統某方面的性能更突出,因此其自由度往往≥3,其車體系統自由度計算可通過式(3)計算.
圖7為尚建忠等[14]提出的一種三搖臂移動系統,側搖臂的轉動副軸線均與y-z平面垂直,而在尾搖臂的所有轉動副中,懸架與車輪鉸接的軸線與y-z平面垂直,懸架與載荷平臺鉸接的軸線與x-y平面垂直.因此,懸架、車輪與地面形成的閉鏈數目L=3,且平面閉鏈λ1=3,λ2=3,形成的空間閉鏈λ3=6,則車體系統自由度為

在進行自由度計算時,運動副數目要包括不同車輪與地面接觸所形成的接觸副.當車輪運時,轉向電機動作而使車輪具有的轉向自由度不在被動適應范圍之內,因此車輪與地面接觸副看作具有一個自由度的運動副[11].
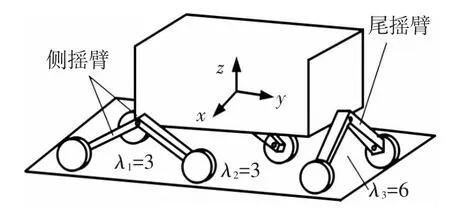
圖7 六輪三搖臂懸架探測車
3 一些常見被動自適應移動系統屬性
在移動系統的研究中,自適應性能是一個重要的性能指標.主動自適應因控制較復雜,還未得到廣泛應用,卻是未來的發展方向.表1是一些有代表性的、常見移動系統的相關屬性.從表中可看出,具有被動自適應性能的移動系統,其單側車輪-懸架系統通過合理連接后,自由度以1為主,整車系統的自由度以3為主,但為使某方面的功能得到加強,可增加相應自由度,使整體自由度>3.這些信息有助于指導設計者從自由度的角度對移動系統進行相應的構型綜合.
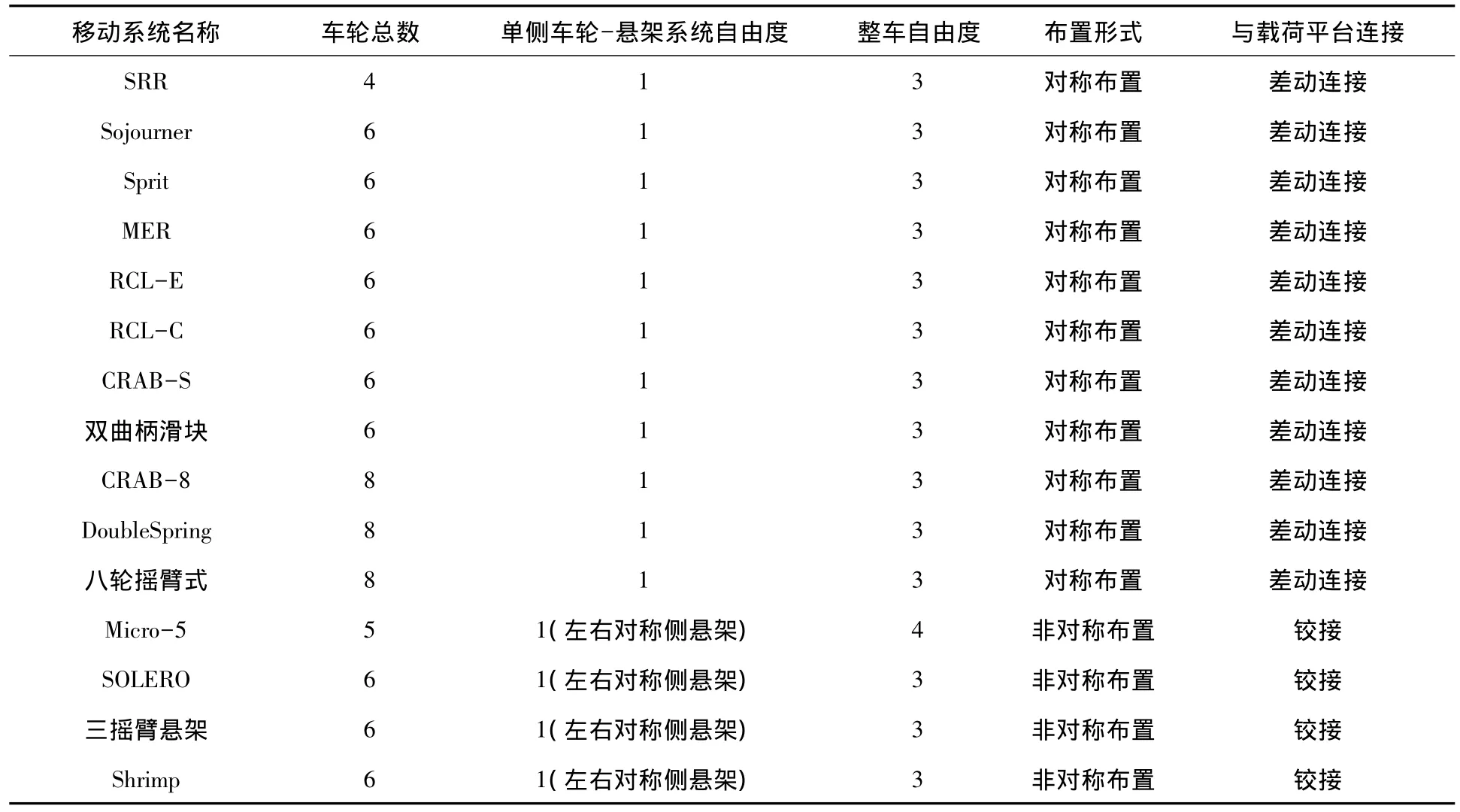
表1 一些常見被動自適應移動系統及其相關屬性[6,15,16]
4 結論
1)分別分析了被動自適應特性與移動系統各主要性能之間的關系,得出車體良好的被動自適應性是實現移動系統綜合性能的基本前提.
2)以良好的被動自適應為條件,對單輪系統進行了建模分析,進一步研究了移動系統單側車輪-懸架系統所需要自由度,并給出了相應的證明.
3)以單側車輪-懸架系統為基礎,研究移動系統整車自由度,對一些已研發的具有被動自適應性移動系統自由度進行統計,發現對稱的單側車輪-懸架系統自由度一般為1,而整車系統自由度以3為主.
4)研究具有被動自適應性能移動機構尤其是單側車輪-懸架系統結構與自由度之間的關系,為構造新型的具有被動自適應性能的探測車提供了借鑒和理論參考.
[1]GU Kanfeng,WANG Hongguang,ZHAO Mingyang.The analyse of the influence of external disturbance on the motion ofa six-wheeled lunarrover[C]//Proceedings of 2007 IEEE International Conference on Mechatronics and Automation.Harbin:IEEE,2007:393-398.
[2]CHEN Baichao,WANG Rongben,JIA Yang,et al.Design of a high performance suspension for lunar rover based on evolution[J].Acta Astronautica,2009,64(9/10):925-934.
[3]SIEGWART R,LAMON P,ESTIER T,et al.Innovative design for wheeled locomotion in rough terrain,robotics and autonomous systems[J].Robotics and Autonomous Systems,2002,40(2/3):151-162.
[4]ROLLINSE,LUNTZJ, FOESSELA. Nomad:a demonstration ofthe transforming chassis[C]//Proceeding of IEEE International Conference on Robotics and Automation.Leuven,Belgium:IEEE,1998:611-617.
[5]LINDEMANN R A,BOCKLER D B,HARRINGTON B D, et al. Mars exploration rover mobility development[J].Robotics & Automation Magazine,IEEE,2006,13(2):19-26.
[6]KUBOTA T,KURODA Y,KUNII Y,et al.Small,light-weight rover“Micro5”for lunar exploration[J].Acta Astronautica,2003,52:447-453.
[7]陶建國.串聯多關節懸架六輪月球車移動系統及其關鍵技術研究[D].哈爾濱:哈爾濱工業大學機電工程學院,2009:8.
[8]尚建忠,羅自榮,張新訪.基于構型的輪式空間探測機器人創新設計與優化[J].中國機械工程,2007,18(4):414-417.
[9]羅昌杰,鄧宗全,劉榮強,等.基于零力矩點理論的腿式著陸器著陸穩定性研究[J].機械工程學報,2010,46(9):38-45.
[10]MALENKOV M I.Key technologies of the moonexplorationrealization and perspectives ofcreation ofhighly effective locomotion systems for the moon rovers[C]//Proceedings of 8th ILEWG conference on exploration and utilization of the moon. Beijing:IEEE,2006:23-27.
[11]SINGH A K,EATHAKOTA V P,KRISHNA K M,et al.Evolution of a four wheeled active suspension rover with minimal actuation for rough terrain mobility[C]//Proceedings of the 2009 IEEE International Conference onRoboticsand Biomimetics.Guilin:IEEE,2009:794-796.
[12]ROONEY J,HOBBS J D.Towards kinematic classification schemes for planetary surface locomotion systems[J].Mechatronics,2003,13(2):153-174.
[13]BARLAS F.Design of a mars rover suspension mechanism[D].Turkey:Izmir Institute of Technology Izmir,2004:23-24.
[14]尚建忠,羅自榮,張新訪.兩種輪式月球車懸架方案及其虛擬樣機仿真[J].中國機械工程,2006,17(1):49-51.
[15]THUEER T,LAMON P,KREBS A,et al.Crab-exploration roverwith advanced obstacle negotiation[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing:IEEE,2006:4260-4263.
[16]THUEER T, KREBS A, SIEGWART R.Comprehensive locomotion performance evaluation of all-terrain robots[C]//Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing:IEEE,2006:4260-4265.
Relationship analysis between passive self-adaptability and degrees of freedom of the wheeled rover’s locomotion system
YANG Fei1,2,TAO Jianguo1,2,DENG Zongquan1,2,LI Jiajun1,2
(1.State Key Laboratory of Robot Technology and System,150080 Harbin,China;2.School of Mechatronics Engineering,Harbin Institute of Technology,150001 Harbin,China)
To make the designed rover have self-adaptability and better contact with ground,DOFs required for single suspension system and the whole rover are studied.Three classification ways of self-adaptability are given,and the relationship between self-adaptability and climbing performance,stability,energy consumption is analyzed.Mathematic model of single wheel-suspension system is established and such system’s DOF is obtained.Based on aforementioned analysis,mathematic models of double,three and k wheel-suspension system are established respectively with calculated DOFs for these systems.Two DOF models for wheeled rover are given followed by DOF statistics and analysis of some representative self-adaptive rovers.The analysis shows that self-adaptability is the basis for realizing comprehensive performance of the locomotion mechanism.DOFs for single suspension system and rover are 1 and 3,respectively.The conclusion has universalism and can determine required DOFs for structural synthesis of wheeled rover.
rover;passive self-adaptability;wheeled locomotion mechanism;DOF;suspension;structural synthesis
TH122
A
0367-6234(2014)03-0030-07
2013-03-30.
高等學校學科創新引智計劃資助項目(B07018);
國家自然科學基金資助項目(51075079).
楊 飛(1985—),男,博士研究生;陶建國(1964—),男,教授,博士生導師;
鄧宗全(1956—),男,教授,博士生導師.
陶建國,jgtao@hit.edu.cn.
(編輯 楊 波)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
