主動(dòng)懸架的H2/H∞混合輸出反饋控制
2014-06-07 10:03:43胡愛(ài)軍孔令強(qiáng)
胡愛(ài)軍,孔令強(qiáng)
(河南理工大學(xué)機(jī)械與動(dòng)力工程學(xué)院,河南焦作 454000)
主動(dòng)懸架的H2/H∞混合輸出反饋控制
胡愛(ài)軍,孔令強(qiáng)
(河南理工大學(xué)機(jī)械與動(dòng)力工程學(xué)院,河南焦作 454000)
運(yùn)用線(xiàn)性分式變換建立了包含不確定參數(shù)的半車(chē)懸架系統(tǒng)模型,選擇合適的性能加權(quán)函數(shù)得廣義被控對(duì)象。為了保證不確定參數(shù)具有魯棒穩(wěn)定性,用H∞范數(shù)作為參數(shù)不確定性的性能指標(biāo),同時(shí),為了使懸架系統(tǒng)性能指標(biāo)處于一個(gè)好的水平,用H2范數(shù)作為衡量擾動(dòng)作用下懸架性能指標(biāo),設(shè)計(jì)了H2/H∞混合控制器。在M talab7.0/Simulink環(huán)境下搭建仿真模型完成對(duì)系統(tǒng)的仿真分析。仿真結(jié)果證明:主動(dòng)懸架的乘坐舒適性明顯優(yōu)于被動(dòng)懸架的乘坐舒適性,同時(shí)汽車(chē)的操作穩(wěn)定性也有一定程度的改善。
主動(dòng)懸架;不確定性;魯棒控制;仿真
0 引言
汽車(chē)懸架系統(tǒng)是現(xiàn)代汽車(chē)的重要組成部分,對(duì)汽車(chē)的行駛平順性以及操作穩(wěn)定性等性能指標(biāo)有著重要的影響。目前,人們對(duì)懸架的設(shè)計(jì)開(kāi)發(fā)工作主要集中在對(duì)控制策略的研究方面,如遺傳算法、滑模控制、模糊控制等[1-3]。這些算法一般沒(méi)有考慮模型的不確定性問(wèn)題,實(shí)際上懸架系統(tǒng)存在諸多不確定的因素,比如汽車(chē)簧載質(zhì)量、輪胎剛度[4]等因素都會(huì)產(chǎn)生一些變動(dòng)。文獻(xiàn)[5]建立了考慮高階未建模不確定性的汽車(chē)懸架模型,設(shè)計(jì)了H2/H∞混合控制器,一定程度上提高了懸架模型的精度,但高階未建模不確定性對(duì)模型不確定性的描述不夠精確,所建的模型過(guò)于簡(jiǎn)單,很多性能不能表達(dá)出來(lái)。文獻(xiàn)[6]應(yīng)用硬約束、H2性能、H∞性能以及極點(diǎn)配置等多約束設(shè)計(jì)了主動(dòng)懸架H2/H∞混合控制器,但沒(méi)有考慮模型的不確定性問(wèn)題。為了能夠準(zhǔn)確表達(dá)懸架模型的不確定性,本文運(yùn)用線(xiàn)性分式變換(LFT)建立了包含不確定參數(shù)的主動(dòng)懸架LFT模型,同時(shí)為了體現(xiàn)更多懸架性能建立了1/2車(chē)體懸架模型。汽車(chē)懸架設(shè)計(jì)時(shí)應(yīng)考慮乘坐舒適性、操作穩(wěn)定性以及機(jī)械約束3項(xiàng)指標(biāo)[7],而乘坐舒適性主要取決于懸架的垂向加速度、俯仰角加速度和懸架動(dòng)撓度,操作穩(wěn)定性取決于前后輪胎的動(dòng)載荷。為了使懸架系統(tǒng)性能指標(biāo)處于一個(gè)好的水平,本文用H2范數(shù)作為衡量擾動(dòng)作用下懸架性能指標(biāo),同時(shí)為了保證不確定參數(shù)具有魯棒穩(wěn)定性,用H∞范數(shù)作為參數(shù)不確定性的性能指標(biāo),運(yùn)用線(xiàn)性矩陣不等式方法(LMI)設(shè)計(jì)H2/H∞混合控制器。
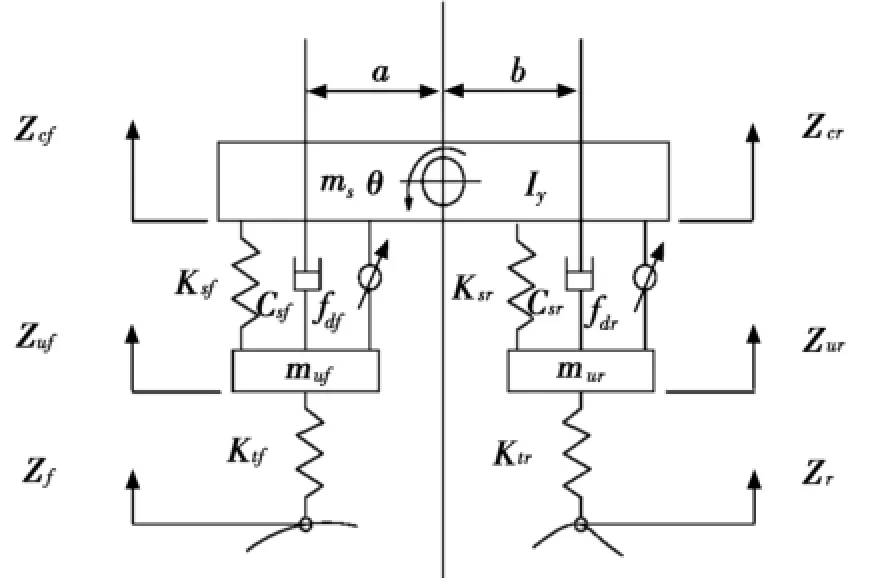
圖1 半車(chē)主動(dòng)懸架系統(tǒng)模型
1 半車(chē)懸架模型及不確定性描述
圖1為半車(chē)主動(dòng)懸架系統(tǒng)模型。在圖1中,ms和Iy分別表示懸架簧載質(zhì)量和簧載質(zhì)量轉(zhuǎn)動(dòng)慣量;Zcf、Zcr和Zuf、Zur分別表示前、后懸架簧載質(zhì)量和非簧載質(zhì)量位移;Zf和Zr分別表示前、后路面位移;Ksf、Ksr分別表示前、后懸架剛度;Csf、Csr分別表示前、后懸架阻尼系數(shù);Ktf、Ktr分別表示前、后輪胎的剛度系數(shù);fdf、fdr分別表示前、后懸可控庫(kù)侖力;a和b表示前后懸架到質(zhì)心的距離;θ表示懸架的俯仰角度。
根據(jù)懸架模型建立如下微分方程:

當(dāng)俯仰角θ在小范圍變動(dòng)時(shí),近似有:

簧載質(zhì)量會(huì)隨著汽車(chē)載貨或載人多少而產(chǎn)生一些變化,輪胎剛度也會(huì)隨著輪胎使用時(shí)間的長(zhǎng)短以及輪胎充氣量多少而變化。實(shí)際的質(zhì)量ms在公稱(chēng)質(zhì)量的30%范圍內(nèi)變化,實(shí)際輪胎的剛度kt在公稱(chēng)剛度的20%范圍內(nèi)變化。這里采用乘性不確定表示參數(shù)的不確定性,即:


圖2 不確定模型框圖

2 混合H2/H∞控制器設(shè)計(jì)
2.1 廣義被控對(duì)象的描述
根據(jù)ISO2631—1997標(biāo)準(zhǔn),人體對(duì)振動(dòng)的敏感頻率范圍在垂直方向?yàn)?~8 Hz,在旋轉(zhuǎn)方向?yàn)?~2 Hz。取垂直方向和俯仰方向加權(quán)傳遞函數(shù)分別為:

為了保證懸架動(dòng)行程不超過(guò)其物理限制,選擇W3(s)為這一輸出的頻率加權(quán)函數(shù):

廣義被控對(duì)象的控制框圖如圖3所示。
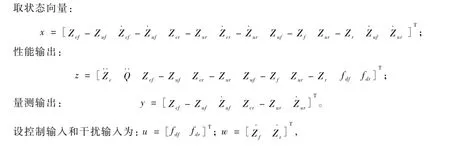

圖3 廣義被控對(duì)象的控制框圖
可得廣義被控對(duì)象的狀態(tài)空間方程為:
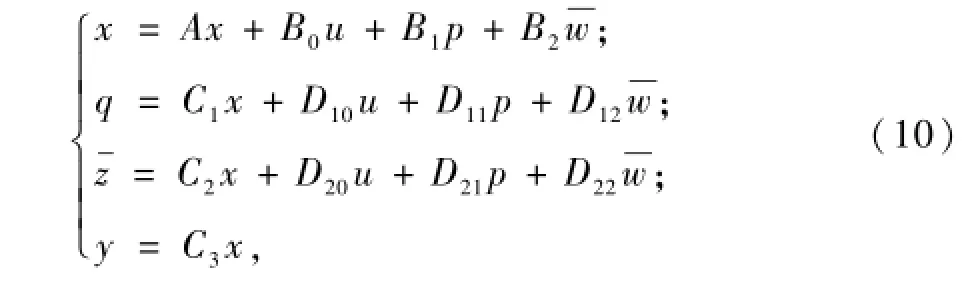
式中,A、B0、B1、B2、C1、D10、D11、C2、D20、C3均為定常矩陣;D12、D21、D22為零矩陣。
2.2 控制器的設(shè)計(jì)
設(shè)計(jì)一個(gè)u=Ky輸出反饋的控制器,使得閉環(huán)系統(tǒng)是漸近穩(wěn)定的,且從p到q的閉環(huán)傳遞函數(shù)Tpq的H∞范數(shù)不超過(guò)一個(gè)給定的上界,以保證閉環(huán)系統(tǒng)對(duì)由p=△q進(jìn)入的不確定性具有魯棒穩(wěn)定性;同時(shí)使得從到z的閉環(huán)傳遞函數(shù)的H2范數(shù)盡可能小,以保證用H2范數(shù)度量的系統(tǒng)性能處于一個(gè)好的水平。即滿(mǎn)足:

根據(jù)文獻(xiàn)[9]可得,要求閉環(huán)系統(tǒng)(13)具有性能(11),當(dāng)且僅當(dāng)存在對(duì)稱(chēng)正定矩陣X1和X2,使得如下不等式成立:
為了能夠求解上述不等式,需引進(jìn)一個(gè)附加約束,即:X=X1=X2,應(yīng)用變量替換的方法,令W=KC3X,則可把上述非線(xiàn)性不等式問(wèn)題轉(zhuǎn)化為線(xiàn)性矩陣不等式:
運(yùn)用求解器mincx求解上述矩陣不等式可得最優(yōu)解X和W,有K=W(C3X)-1。
3 仿真與分析
車(chē)輛參數(shù)為:ms=690 kg;Iy=1 222 kg·m2;muf=mur=192 kg;ksf=17 kN/m;ksr=22 kN/m;ktf=ktr=192 kN/m;csf=csr=1.5 kN·s/m;a=1.25 m;b=1.51 m。選擇積分白噪聲路面模型作為激勵(lì)信號(hào)運(yùn)算得到H∞的性能指標(biāo)為0.479 78,H2的性能指標(biāo)為0.240 91,所得控制器

在Matlab7.0環(huán)境下,對(duì)采用所設(shè)計(jì)控制器的主動(dòng)懸架進(jìn)行仿真,并與被動(dòng)懸架進(jìn)行對(duì)比,繪制出車(chē)身垂向加速度、俯仰角加速度、輪胎變形量以及懸架動(dòng)撓度的幅頻特性曲線(xiàn),如圖4~圖7所示。由圖4可知:在質(zhì)心的垂向加速度方面,采用所設(shè)計(jì)控制器的主動(dòng)懸架明顯優(yōu)于被動(dòng)懸架,在頻率為4~8 Hz時(shí)性能得到明顯的改善。由圖5可知:在懸架的俯仰角加速度方面,采用所設(shè)計(jì)控制器的主動(dòng)懸架比被動(dòng)懸架有所減小,在頻率為人體敏感的1~2 Hz時(shí)得到明顯的改善,這說(shuō)明汽車(chē)的乘坐舒適性得到提高。由圖6可知:主動(dòng)懸架在高頻段的輪胎變形量有一定惡化。由圖7可知:在小于1 Hz的范圍內(nèi)懸架動(dòng)撓度有一定惡化,這是懸架系統(tǒng)的固有特性,性能指標(biāo)之間存在制約關(guān)系所致。

圖4 垂向加速度的幅頻特性
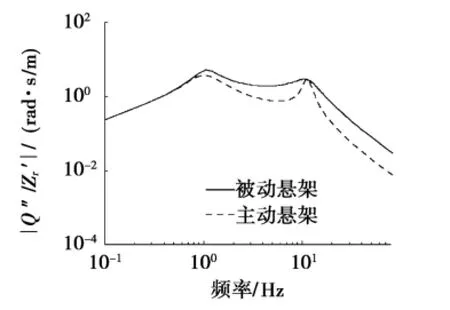
圖5 俯仰角加速度幅頻特性
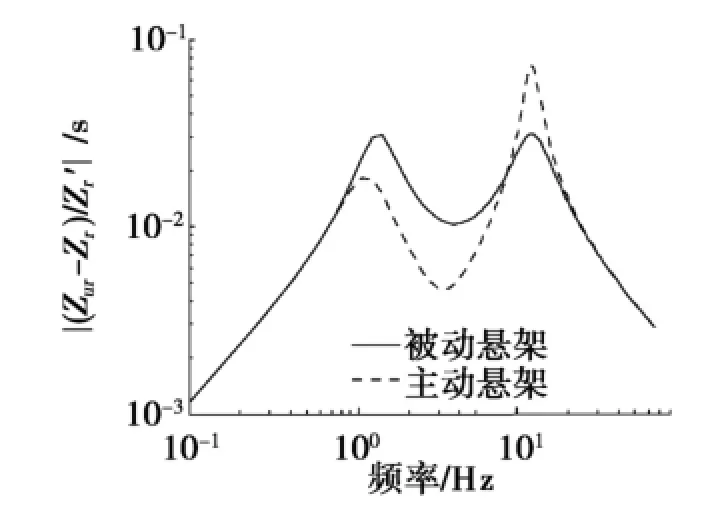
圖6 輪胎變形量的幅頻特性
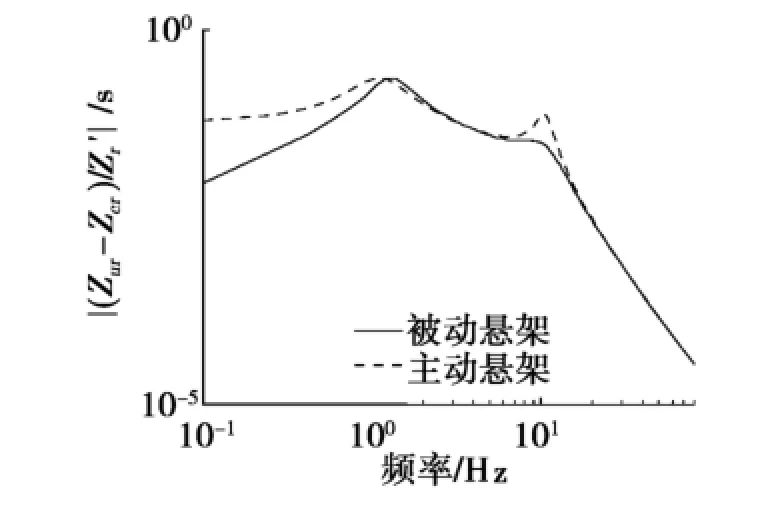
圖7 懸架動(dòng)撓度的幅頻特性
假設(shè)汽車(chē)以速度u=30 m/s行駛在C級(jí)路面上,在Matlab7.0/Simulink中搭建汽車(chē)模型,仿真得到汽車(chē)在時(shí)域范圍內(nèi)的響應(yīng)曲線(xiàn),如圖8~圖13所示。
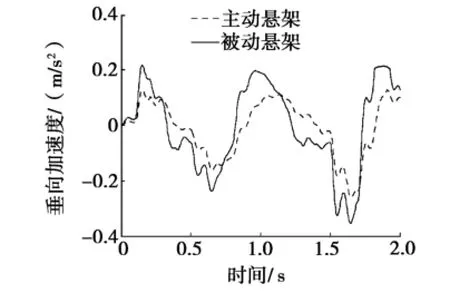
圖8 垂向加速度響應(yīng)
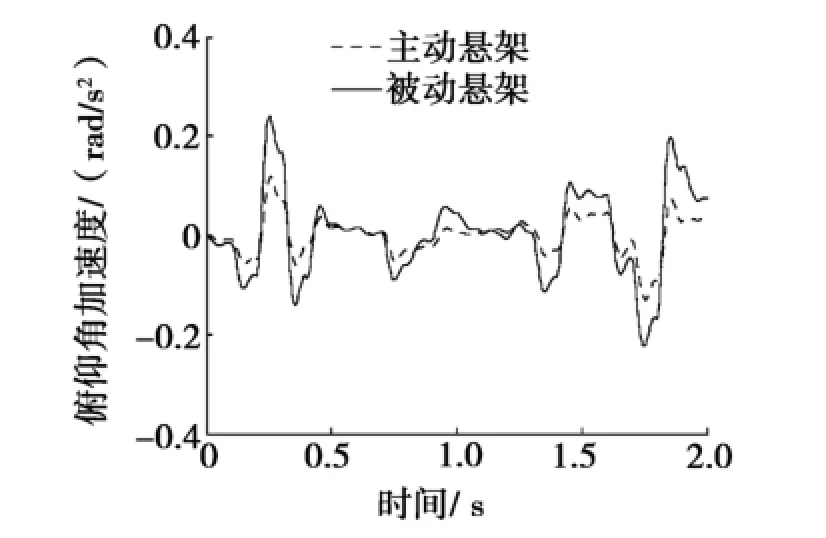
圖9 俯仰角加速度響應(yīng)
在圖8中,主動(dòng)懸架的垂向加速度的峰值明顯低于被動(dòng)懸架,垂向加速度最高峰值減低約28%。在圖9中,主動(dòng)懸架的俯仰角加速度的峰值也明顯降低,最高峰值減低約50%,這說(shuō)明主動(dòng)懸架的乘坐舒適性得到改善。

圖10 后懸架動(dòng)行程
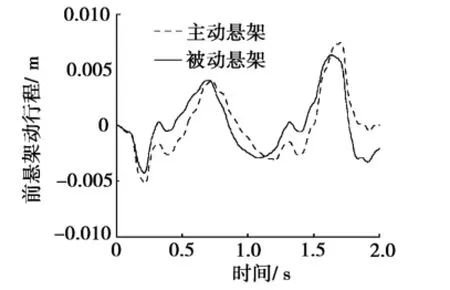
圖11 前懸架動(dòng)行程
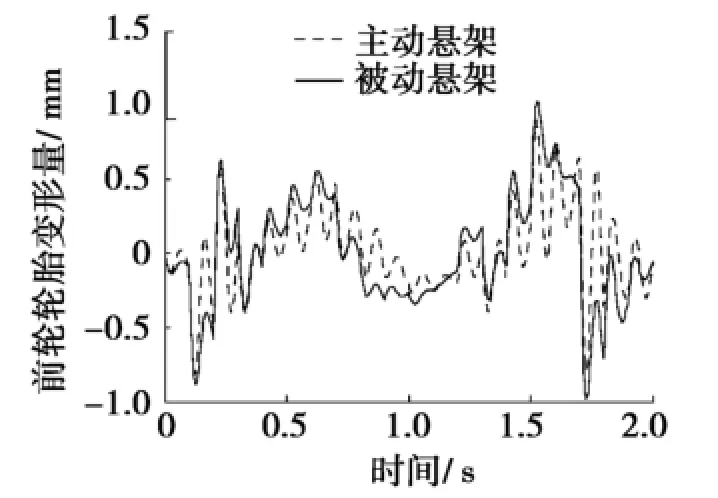
圖12 前輪輪胎變形量
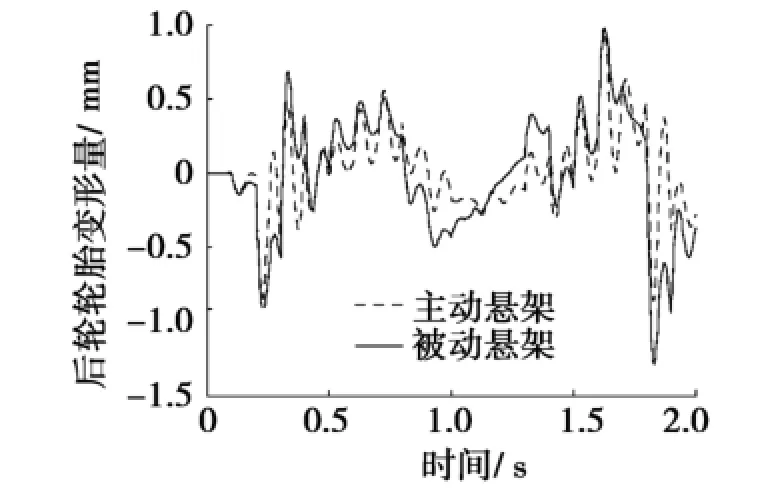
圖13 后輪輪胎變形量
在圖10和圖11中,主動(dòng)懸架的懸架動(dòng)行程比被動(dòng)懸架有所增加,但增加幅度很小,只要保證在機(jī)械約束的范圍內(nèi),不影響乘坐舒適性。對(duì)圖12和圖13比較可知:主動(dòng)懸架比被動(dòng)懸架的輪胎變形量略有減小,這在一定程度上提高了汽車(chē)的操作穩(wěn)定性。
4 結(jié)論
運(yùn)用LFT建立含有不確定參數(shù)主動(dòng)懸架的LFT模型,設(shè)計(jì)了H2/H∞混合控制。利用Matlab7.0/Simulink進(jìn)行了頻域和時(shí)域范圍內(nèi)的仿真分析。通過(guò)仿真結(jié)果證明所設(shè)計(jì)的控制器是有效的。采用所設(shè)計(jì)控制器以后,主動(dòng)懸架的乘坐舒適性明顯優(yōu)于被動(dòng)懸架的乘坐舒適性,同時(shí),汽車(chē)的操作穩(wěn)定性也有一定程度的改善。
[1] 龔侃,何天明,陳超.基于遺傳算法的汽車(chē)懸架仿真與優(yōu)化設(shè)計(jì)[J].武漢理工大學(xué)學(xué)報(bào),2012,34(3):313-316.
[2] 韓衛(wèi)沙,張京軍.基于滑模控制的半主動(dòng)懸架系統(tǒng)仿真分析[J].西華大學(xué)學(xué)報(bào),2011,30(2):43-46.
[3] 楊博,趙江杰,郭志軍.鉸接式自卸汽車(chē)平衡懸架動(dòng)力學(xué)特性[J].河南科技大學(xué)學(xué)報(bào):自然科學(xué)版,2012,33(2):22-25.
[4] Damine SO S,Luc D.Skyhook and H∞Control of Semi-active Suspension:Some Practical Aspercts[J].Vehicle System Dymamics,2003(4):273-308.
[5] 方敏,史明光,陳無(wú)畏.汽車(chē)主動(dòng)懸架多目標(biāo)H2/H∞混合控制[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2005,36(3):5-7.
[6] 徐伯林,賈英民.多約束主動(dòng)懸架H2/H∞混合控制設(shè)計(jì)[J].計(jì)算機(jī)仿真,2012,29(3):44-48.
[7] Hrovat D.Survey of Advanced Suspension Developments and Related Op timal Control Applications[J].Automatica,1997,33(10):1781-1817.
[8] 周克敏,Doyle JC,Glover K.魯棒與最優(yōu)控制[M].北京:國(guó)防工業(yè)出版社,2002.
[9] 俞立.魯棒控制—線(xiàn)性矩陣不等式處理方法[M].北京:清華大學(xué)出版社,2002.
[10] 喻凡,林逸.汽車(chē)系統(tǒng)動(dòng)力學(xué)[M].北京:機(jī)械工業(yè)出版社,2005.
U461.4
A
1672-6871(2014)03-0027-05
國(guó)家自然科學(xué)基金項(xiàng)目(U1204517);河南省教育廳自然科學(xué)研究計(jì)劃基金項(xiàng)目(2011A460006);河南理工大學(xué)博士基金項(xiàng)目(B2009-16)
胡愛(ài)軍(1974-),男,河南焦作人,講師,博士,碩士生導(dǎo)師,研究方向?yàn)槠?chē)系統(tǒng)動(dòng)力學(xué)與控制.
2013-09-04
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50