基于服務(wù)性能的導(dǎo)航衛(wèi)星機動時間優(yōu)化
2014-06-13 11:59:18胡彩波陳金平焦玲玲趙金賢張之學
無線電工程 2014年6期
胡彩波,陳金平,焦玲玲,趙金賢,張之學
(1.武漢大學衛(wèi)星導(dǎo)航技術(shù)研究中心,湖北武漢430079;2.北京衛(wèi)星導(dǎo)航中心,北京100094;3.天津科技大學電子信息與自動化學院,天津300222)
0 引言
隨著航天技術(shù)的不斷發(fā)展,各類型的衛(wèi)星在軌運行的數(shù)量不斷增多,據(jù)國家無線電監(jiān)測中心數(shù)據(jù)顯示,截至 2013年 3月,全球共有在軌衛(wèi)星1 067顆[1]。一方面說明衛(wèi)星在國民經(jīng)濟、社會發(fā)展和軍事領(lǐng)域的應(yīng)用更加廣泛,用戶對其依賴性增大,對其正常運行的連續(xù)性和可用性提出了更高的要求;另一方面,由于空間資源有限,衛(wèi)星與衛(wèi)星之間的軌位資源的爭奪更加激烈,對衛(wèi)星軌道控制的策略提出了更高的要求[2]。
近年來,衛(wèi)星導(dǎo)航系統(tǒng)發(fā)展迅速,在軌衛(wèi)星數(shù)量不斷增加。導(dǎo)航系統(tǒng)衛(wèi)星不同于其他衛(wèi)星,用戶對其可用性和連續(xù)性有著更加苛刻的要求[3,4]。在軌衛(wèi)星運行一段時間后,由于受到攝動力的影響,會逐漸偏離軌道。為了保持星座構(gòu)型,需要對偏離軌道的衛(wèi)星實施軌道機動。目前的處理策略是在導(dǎo)航衛(wèi)星進行軌控前,地面控制中心將該星置為“不可用”,提示導(dǎo)航用戶不要使用該衛(wèi)星參與業(yè)務(wù)處理。這種操作會使用戶觀測的有效衛(wèi)星數(shù)量減少,導(dǎo)致星座構(gòu)型發(fā)生變化。個別地區(qū)和個別時間段出現(xiàn)因星座幾何構(gòu)型變化引起的服務(wù)精度下降[5]。下面分析了區(qū)域衛(wèi)星導(dǎo)航系統(tǒng)服務(wù)性能的變化規(guī)律,提出了一種將軌道機動和系統(tǒng)性能結(jié)合的時間選擇策略,以降低軌道控制操作對系統(tǒng)服務(wù)性能的影響。
1 導(dǎo)航系統(tǒng)服務(wù)性能
評價導(dǎo)航系統(tǒng)服務(wù)性能的指標主要有精度、完好性、連續(xù)性和可用性。精度是指系統(tǒng)為用戶所提供的位置和用戶真實位置在一定置信概率下的重合度;完好性是指當導(dǎo)航系統(tǒng)的定位誤差超過允許限值不能勝任規(guī)定的導(dǎo)航工作時,系統(tǒng)能在規(guī)定的時間內(nèi)及時報警的能力;連續(xù)性是指假設(shè)系統(tǒng)在初始階段是可用的,其可用性將在運行階段被保持;可用性是指系統(tǒng)提供可用導(dǎo)航服務(wù)的概率[6]。上述4個評價指標是相關(guān)的,均與在軌衛(wèi)星的運行狀態(tài)有關(guān),在軌衛(wèi)星“不可用”導(dǎo)致用戶可用衛(wèi)星數(shù)量的變化會直接影響到系統(tǒng)的服務(wù)性能。
對于衛(wèi)星導(dǎo)航系統(tǒng)來說,星座的運行是周期性的,可以通過在某一地點、固定間隔內(nèi)的觀測結(jié)果來確定星座的可用性。
單點可用性有如下定義:
在位置l,時間t衛(wèi)星的瞬時可用性為:

式中,bool()X為布爾函數(shù);X為判決條件。
在時刻t0,()t之間,間隔為Δt,共K個時刻的單點瞬時可用性為:

將指定的服務(wù)區(qū)域按照經(jīng)緯度格網(wǎng)進行劃分,通過計算每一個格網(wǎng)點的單點可用性計算服務(wù)區(qū)的可用性。

式中,L為服務(wù)區(qū)域劃分的格網(wǎng)點總數(shù);K為間隔為Δt的總的時刻點數(shù);T為統(tǒng)計的總時間;l為計算時所處的位置。
假設(shè)各衛(wèi)星誤差相對獨立的前提下,用戶定位的精度(δ)最終表示為PDOP和偽距誤差因子(User Equivalent Range Error,UERE)之積:

對于衛(wèi)星導(dǎo)航系統(tǒng),當某顆衛(wèi)星進行軌道機動時,由于電文參數(shù)的計算周期及注入頻度限值,衛(wèi)星播發(fā)的軌道參數(shù)信息與軌道機動期間的實際運行軌道相比存在差異,用戶使用該電文內(nèi)容進行衛(wèi)星位置計算時與實際的衛(wèi)星位置不符,易造成用戶計算結(jié)果變差。中心控制系統(tǒng)通常將該星置為“不可用”,直至軌道精度恢復(fù)至可用范圍,再置為“可用”。觀測結(jié)果顯示,這一時間段約6~8 h,且控制比較頻繁,地球靜止軌道(GEO)衛(wèi)星20天左右需要進行一次軌道機動控制[7]。
下面重點針對北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)進行分析,空間星座由5顆GEO衛(wèi)星、4顆中圓地球軌道(MEO)衛(wèi)星和5顆傾斜地球同步軌道(IGSO)衛(wèi)星組成[8],指定分析區(qū)域為(55°E ~ 180°E,55°S ~55°N)。BDS衛(wèi)星全部運行正常時該區(qū)域PDOP分布情況如圖1所示。
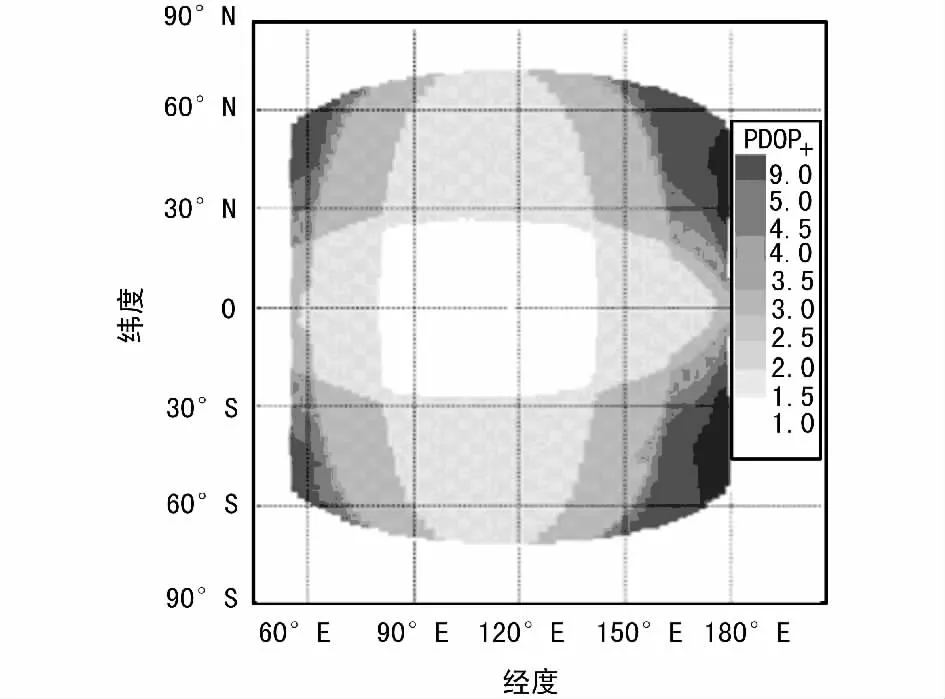
圖1 BDS全部衛(wèi)星可用時平均PDOP
由圖1可知,該星座條件下覆蓋區(qū)PDOP表現(xiàn)為不均勻分布的現(xiàn)象,指定區(qū)域的中心區(qū)域平均PDOP在2左右,邊緣地區(qū)平均PDOP可達4以上,這與其GEO+IGSO+MEO混合星座構(gòu)型是相關(guān)的[5]。此星座條件下,每顆衛(wèi)星都發(fā)揮著重要作用,任何衛(wèi)星“不可用”都會對PDOP產(chǎn)生影響。
2 在軌衛(wèi)星軌道控制
2.1 軌道控制策略
在軌衛(wèi)星軌道控制任務(wù)包括星座軌道捕獲和軌道保持[9]。星座中的每顆衛(wèi)星由于其初始入軌誤差及在軌運行期間所受軌道攝動影響,星座各顆衛(wèi)星在經(jīng)過一段時間的運行后會逐漸偏離星座設(shè)計的軌道,并逐漸使星座結(jié)構(gòu)失衡,最后導(dǎo)致星座失效,甚至衛(wèi)星之間發(fā)生碰撞。軌道控制的任務(wù)就是要保持星座的整體構(gòu)形。目前軌道控制按照應(yīng)用方式分為4類:變軌控制和軌道機動、軌道保持、交會和對接以及再入和著陸控制[10]。對于已組網(wǎng)的導(dǎo)航衛(wèi)星來說,主要是指軌道機動和軌道保持。
軌道控制主要根據(jù)在軌衛(wèi)星運行的軌位,由測控系統(tǒng)發(fā)送遙控指令,完成衛(wèi)星在軌運行位置的調(diào)整。對于BDS,是由不同的分系統(tǒng)負責完成導(dǎo)航信息計算與注入、軌道保持與維護等任務(wù),使用的是2套相互獨立的設(shè)備和數(shù)據(jù)鏈路,兩者對在軌衛(wèi)星狀態(tài)的判讀也是相互獨立的,軌道控制時機和控制算法等方面有較成熟的理論[2,11,12]。目前的控制策略是以保證衛(wèi)星安全為主,確保衛(wèi)星運行在既定的軌道范圍。一般通過星上發(fā)動機提供的推力實現(xiàn),也可通過有限推力控制。但不管以何種方式執(zhí)行,都會使衛(wèi)星位置發(fā)生變化,使衛(wèi)星播發(fā)的導(dǎo)航星歷數(shù)據(jù)精度下降。
2.2 軌道控制對系統(tǒng)服務(wù)性能影響
根據(jù)導(dǎo)航系統(tǒng)組成、分工和工作原理,運控系統(tǒng)負責導(dǎo)航衛(wèi)星導(dǎo)航信息的計算和注入以及在軌衛(wèi)星有效載荷運行狀態(tài)的監(jiān)視;測控系統(tǒng)負責衛(wèi)星軌道保持與控制以及在軌衛(wèi)星平臺運行狀態(tài)的監(jiān)視。
運控系統(tǒng)利用監(jiān)測站觀測數(shù)據(jù)完成在軌衛(wèi)星的軌道確定,將符合精度要求的定軌結(jié)果數(shù)據(jù)通過上行注入鏈路注入到衛(wèi)星,由其按照指定的頻度播發(fā)給用戶。但在衛(wèi)星軌道控制期間,由于受到電文發(fā)播頻度及系統(tǒng)體制設(shè)計的限制,系統(tǒng)發(fā)播的軌道參數(shù)精度下降,通常需要將進行軌道控制的衛(wèi)星標識為“不可用”,以告知用戶在衛(wèi)星軌道機動期間不建議使用該衛(wèi)星。對于GPS等全球均勻星座來說,在軌衛(wèi)星數(shù)量多且分布均勻,單星“不可用”對服務(wù)區(qū)內(nèi)用戶服務(wù)影響較小[13];但對于區(qū)域衛(wèi)星導(dǎo)航系統(tǒng),由于其星座構(gòu)型的不均勻性,單星“不可用”,將會引起某個地區(qū)某段時間星座幾何構(gòu)型的變化,影響到該時間段的服務(wù)精度[14]。
針對BDS星座,分析了2013年4月1日至7日的軌道數(shù)據(jù),給出指定區(qū)域PDOP變化情況,為計算方便,將區(qū)域劃分成5°×5°的網(wǎng)格,分別計算每個網(wǎng)格點7天內(nèi)每10 min的PDOP變化情況,并對每個網(wǎng)格點的計算PDOP值求取平均值,找出影響大的衛(wèi)星和位置。假設(shè)一顆衛(wèi)星進行軌道機動(不可用),將該星剔除出網(wǎng)絡(luò)(7天內(nèi)均不參與處理),求取與全星座衛(wèi)星均可用時的差值ΔPDOP(本文僅考慮同一時間只有一顆衛(wèi)星軌控):

式中,ΔPDOPi,j為網(wǎng)格點i,()j衛(wèi)星全部正常時PDOP值與衛(wèi)星k軌控期間 PDOP值的差值;PDOP(all)為衛(wèi)星全部正常;Sk為衛(wèi)星k;i為網(wǎng)格點橫坐標;j為網(wǎng)格點縱坐標。
針對BDS每顆衛(wèi)星軌道機動時服務(wù)區(qū)域內(nèi)每個格網(wǎng)點PDOP變化情況分別進行統(tǒng)計,求取7天內(nèi)PDOP變化最大值和平均值,如表1所示。說明每顆衛(wèi)星置為“不可用”會引起服務(wù)區(qū)內(nèi)個別區(qū)域PDOP發(fā)生80以上的變化,折算到用戶端,按照UERE為1 m估算[15],可產(chǎn)生80 m以上的定位誤差。
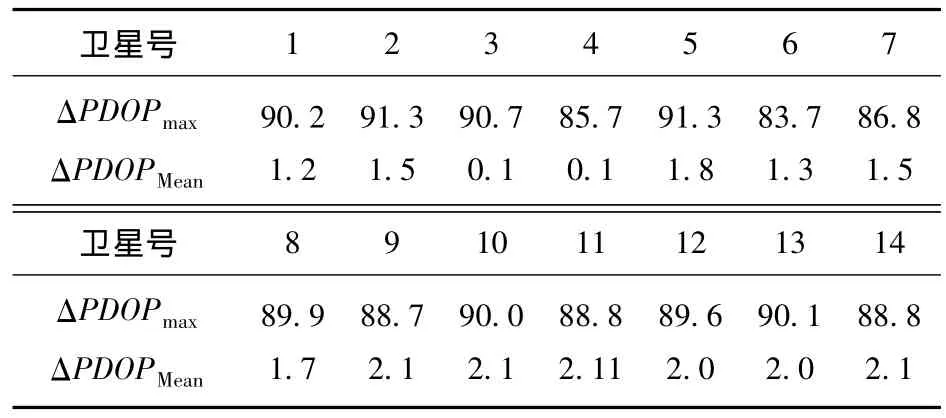
表1 單星不可用時服務(wù)區(qū)域PDOP最大差異
3 軌道機動時間優(yōu)化設(shè)計
由表1可知,Sat-5衛(wèi)星故障時,對服務(wù)區(qū)域產(chǎn)生的影響最大,下面以Sat-5進行軌道機動為例,分析軌道控制前后服務(wù)區(qū)內(nèi)網(wǎng)格點PDOP變化情況。為方便分析,選取圖1中變化相對較大且位置不在服務(wù)區(qū)域邊緣的格網(wǎng)點 A(60°E,50°N),提取該點處Sat-5進行軌道機動前后的PDOP值。
按照目前軌道機動的處置策略,該衛(wèi)星在可視弧段內(nèi)的任一時間點均存在實施機動操作的可能。故利用Satellite Tool Kit(STK)軟件仿真給出了7天的PDOP變化情況[16]如圖2所示(開始時間為2013年3 月13 日 3∶00∶00,每5 min采樣),顯示的是Sat-5衛(wèi)星在7天內(nèi)任一時間進行軌道機動“不可用”對A點的PDOP影響。由圖2可知,PDOP差異表現(xiàn)在個別時間段相對較大。如果錯開該影響較大的時段,找到相對變化較小的時間段,進而研究在此時間段實施軌道機動的性能。
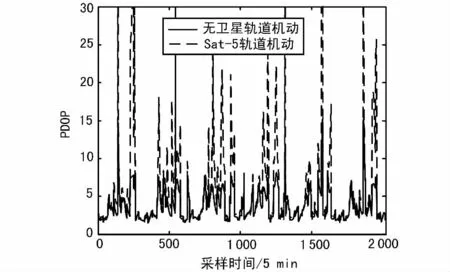
圖2 A點Sat-5軌道機動與否PDOP變化時間序列
利用衛(wèi)星廣播的基本導(dǎo)航信息,可以得到各顆衛(wèi)星的位置,計算各點處的PDOP。利用衛(wèi)星位置的可預(yù)報性,設(shè)計提出了基于系統(tǒng)服務(wù)性能窗口滑動選取軌控時間的方法,以實際獲取的衛(wèi)星軌道作為初始值,參考測控部門給出的計劃軌控時間表,計算指定區(qū)域和全區(qū)域的PDOP變化情況,尋找對全區(qū)域或者指定區(qū)域影響最小的時間段,反饋給相應(yīng)的軌道機動實施部門作為參考。
設(shè)置表示衛(wèi)星狀態(tài)的向量為:

式中,sati表示第i顆衛(wèi)星的狀態(tài),用 bool函數(shù)表示。
設(shè)置第i顆進行軌控的衛(wèi)星狀態(tài)為0:

對指定地區(qū)進行PDOP計算,判斷指定的軌控時間段內(nèi)該地區(qū)的PDOP變化差值(以該地區(qū)該時間段全部衛(wèi)星可用時計算得到的PDOP為基準),與門限值進行比較,如果大于門限值,則說明該星“不可用”,對該地區(qū)的影響較大,需要調(diào)整軌控的時間,按照6 h的窗口(目前軌道機動最短執(zhí)行時間,可調(diào)整)進行滑動,重復(fù)比較不同時間段該地區(qū)的PDOP差值,選擇差值最小即影響最小的時間段,作為該星軌道機動的參考時間,流程圖如圖3所示。
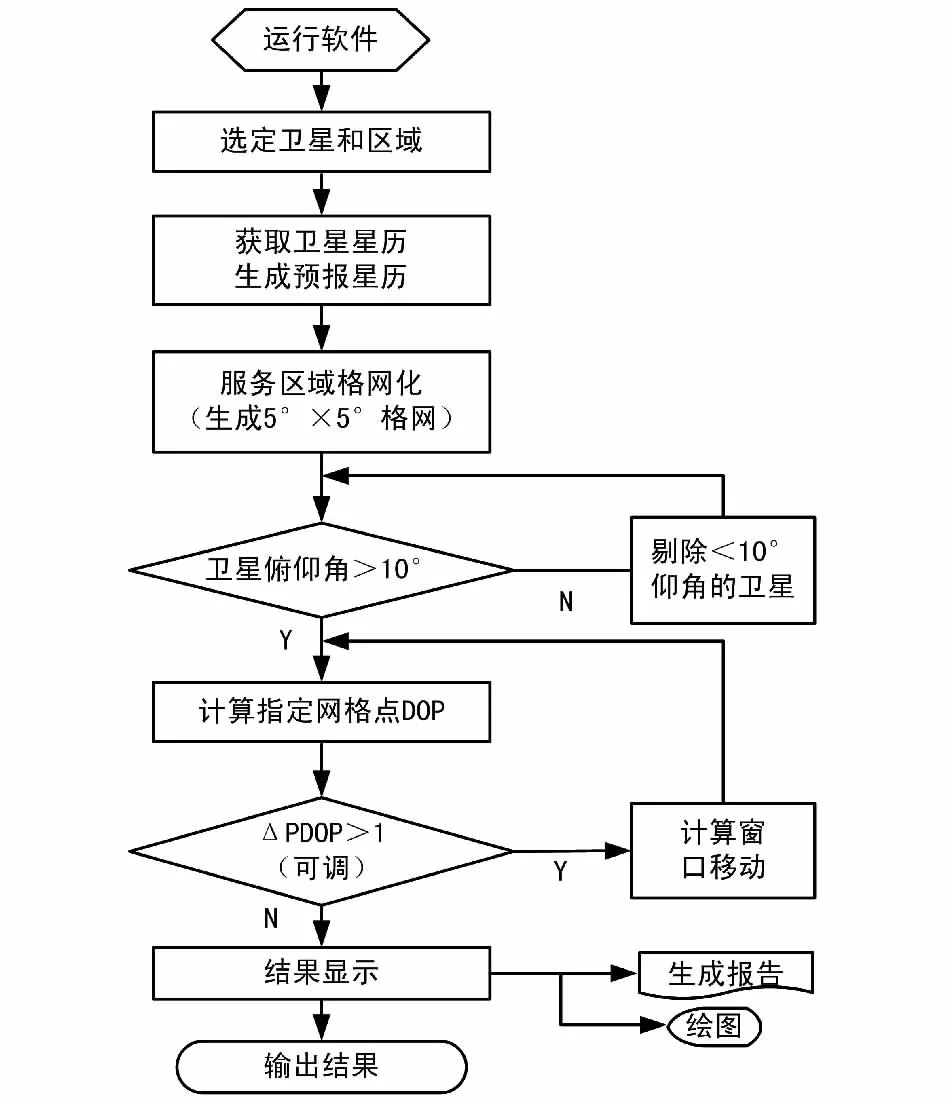
圖3 基于窗口滑動的PDOP計算流程
利用上述方法,結(jié)合測控部門給定的衛(wèi)星軌道機動計劃表和指定保障的區(qū)域,就可以計算評估該星軌道機動前后PDOP變化情況,通過窗口移動的分析策略,給出較為合理的軌道機動實施時間。針對Sat-5衛(wèi)星,假設(shè)既定軌道機動時間為2013年3月13日9時(圖2所示的采樣點931處),可看出A點PDOP由Sat-5星不軌道機動時的7變化為進行軌道機動時的21,如圖4所示,影響了該地區(qū)服務(wù)精度。
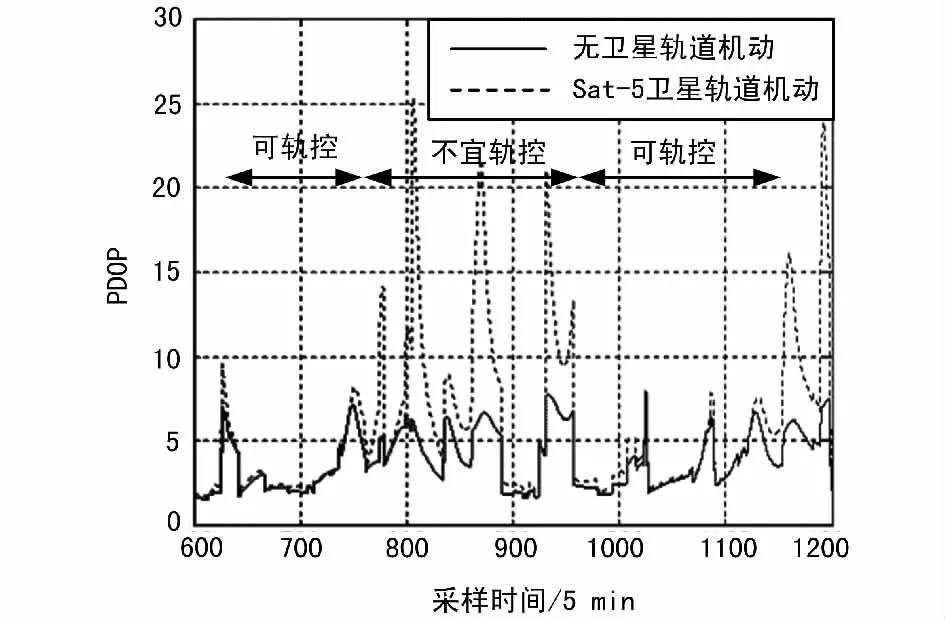
圖4 A點軌道機動前后的PDOP變化
由圖4可以看出,衛(wèi)星軌道機動對系統(tǒng)服務(wù)性能產(chǎn)生一段時間的影響,且衛(wèi)星軌道機動實際操作也需要一段時間完成,如果將機動時間短暫性的移開,并不能產(chǎn)生對系統(tǒng)服務(wù)性能影響最小要求的結(jié)果。
針對上述假定軌道機動時間點,運用該處理策略進行分析。設(shè)定分析間隔為[-20,20]h,持續(xù)時間設(shè)定為6 h,窗口滑動步進設(shè)定為1 h,計算結(jié)果如圖5所示。
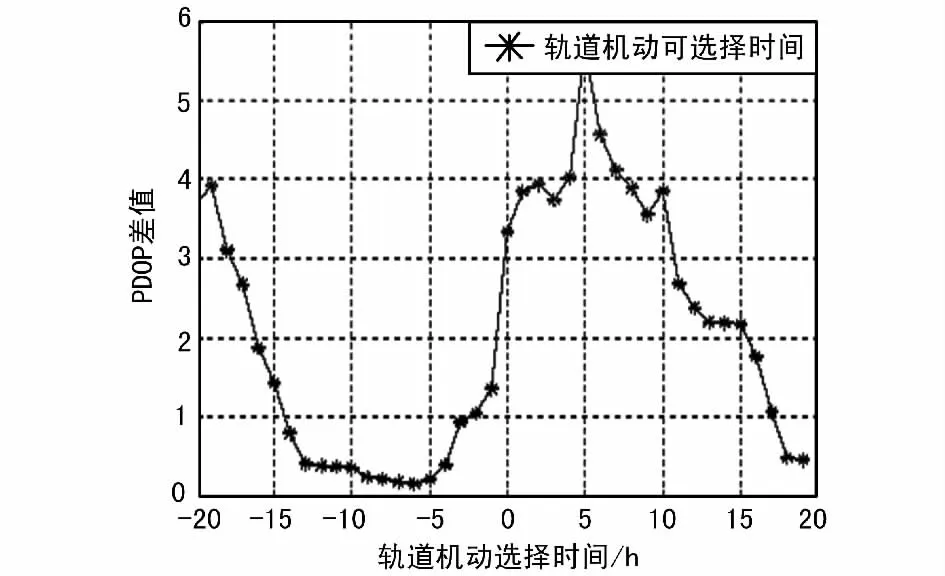
圖5 優(yōu)化選擇軌控時間后的A點PDOP
在測控部門給定的軌道機動時間執(zhí)行操作是不合適的,如果推遲操作時間,17 h之內(nèi)對該地區(qū)的影響PDOP均>1;如果提前操作時間,最優(yōu)值出現(xiàn)在-6 h,如果在該時間實施操作,期間對PDOP變化的影響僅為0.03。
同時也看出,適合軌道機動的時間的選取是依據(jù)PDOP變化差異的大小確定的,并不是以找到完全無影響的時間段為最優(yōu)結(jié)果,需綜合考慮測控部門的計劃窗口以及指定地區(qū)服務(wù)影響的承受限值,進一步研究PDOP變化的判斷閾值。
4 結(jié)束語
隨著衛(wèi)星導(dǎo)航應(yīng)用領(lǐng)域逐步深入,用戶對導(dǎo)航系統(tǒng)的依賴性越來越高,要求系統(tǒng)提供連續(xù)、穩(wěn)定和高精度的信號和服務(wù)。但對在軌運行衛(wèi)星進行軌道機動控制也是維持星座構(gòu)型的必要操作,帶來的后果就是衛(wèi)星一段時間的“不可用”,因而致使用戶可視范圍內(nèi)可用衛(wèi)星數(shù)量發(fā)生變化。本文基于BDS星座,分析了單顆衛(wèi)星實施軌道機動對服務(wù)區(qū)性能的影響,提出了基于計算網(wǎng)格PDOP的窗口式滑動優(yōu)選衛(wèi)星軌道機動時間的方法,并進行了7天的仿真分析,確定對指定區(qū)域影響最小的時間段,結(jié)論可以作為測控系統(tǒng)實施在軌衛(wèi)星軌道機動的時間選擇依據(jù)。
[1]趙 爽.全球航天發(fā)展情況簡介[J].衛(wèi)星與網(wǎng)絡(luò),2013,7:26 -31.
[2]李恒年,高益軍,余培軍,等.地球靜止軌道共位控制策略研究[J].宇航學報,2009,30(3):967 -973.
[3]李作虎.衛(wèi)星導(dǎo)航系統(tǒng)性能監(jiān)測及評估方法研究[D].鄭州:解放軍信息工程大學,2012:140-145.
[4]徐 嘉.故障星分布對星座PDOP可用性影響的建模及評價[J].航空學報,2008,29(5):1 139-1 143.
[5]陳金平,周建華.衛(wèi)星導(dǎo)航系統(tǒng)性能要求的概念分析[J].測控技術(shù),2005,30(1):30 -32.
[6]翟 桅,張國柱.基本星座下北斗衛(wèi)星導(dǎo)航系統(tǒng)服務(wù)性能分析[J].全球定位系統(tǒng),2011,4:56 -60.
[7]李國重,李建文,焦文海,等.顧及衛(wèi)星故障修復(fù)的導(dǎo)航星座PDOP可用性分析方法研究[J].武漢大學學報信息科學版,2010,35(7):841 -845.
[8]北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號接口控制文件公開服務(wù)信號B1I(1.0版).中國衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室[S],2012.
[9]蔡成林,李孝輝.混合星座的精度因子與定位性能分析[J].測繪科學,2009,34(2):67-69.
[10]潘科炎,王旭東,李 果.星座與星座軌道控制[J].航天控制,2002,3:51 -57.
[11]王 石.衛(wèi)星軌道控制與軌道確定算法研究[D].長沙:國防科學技術(shù)大學,2002:74-80.
[12]張榮保.衛(wèi)星軌道保持方法[J].中國空間科學技術(shù),1988,2(1):48 -50.
[13]WENG Chin - tang,CHEN Chih - wei,TINGET Wen -h(huán)ing.Statistical Characterization of BEIDOU Navigation Errors with A Consumer Multi Constellation GNSS Receiver[C]∥ION GNSS 2013,2013:2 821 -2 827.
[14]帥 平,曲廣吉,陳忠貴.區(qū)域?qū)Ш叫亲治鲈O(shè)計研究[J].空間科學學報,2006,26(4):268 -276.
[15]YANG Yuan - xi.Positioning Performance and Contribution of COMPAS[C]∥ ION GNSS+2012,2012:1 728-1 761.
[16]楊 穎,王 琦.STK在計算機仿真中的應(yīng)用[M].北京:國防工業(yè)出版社,2005:103-123.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
今日農(nóng)業(yè)(2019年14期)2019-09-18 01:21:54
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年15期)2019-01-03 12:11:33
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
商周刊(2017年9期)2017-08-22 02:57:56
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導(dǎo)刊(2016年34期)2016-04-11 00:49:44