非磁性次級直線感應(yīng)電機力特性及渦流損耗分析
2014-07-04 03:21:18李碩范瑜呂剛李華偉
電機與控制學(xué)報 2014年4期
關(guān)鍵詞:磁場
李碩, 范瑜, 呂剛, 李華偉
(北京交通大學(xué)電氣工程學(xué)院,北京100044)
0 引言
磁懸浮列車是一種新型地面無接觸高速交通運輸工具,具有無污染、噪音小、能耗低、安全性高等特點[1]。但其鋪設(shè)成本高,維護復(fù)雜,與既有線路不兼容等局限性,不適合大規(guī)模推廣。
本文所研究的非磁性次級直線感應(yīng)電機屬于電動式磁懸浮系統(tǒng)。在電機初級繞組中通入三相對稱交變電流產(chǎn)生運動的行波磁場,該磁場與非磁性次級導(dǎo)體中感應(yīng)出的渦流磁場相互作用產(chǎn)生懸浮力,同時又可以提供驅(qū)動力[2]。
目前研究電動式磁懸浮系統(tǒng)以永磁電動式為主,如美國威斯康辛州立大學(xué)的 T.A.Lipo教授[3-4]及日本九州大學(xué)的藤井信南教授[5-6]都對永磁電動式磁懸浮系統(tǒng)進行了深入研究,但目前尚處于實驗室研究階段。永磁電動式磁懸浮系統(tǒng)產(chǎn)生懸浮力需要附加的推進系統(tǒng)使永磁體與非磁性導(dǎo)體板相對運動,存在附加的推進系統(tǒng)將產(chǎn)生很大的機械振動及機械噪聲大等缺點。
非磁性次級直線電動式磁懸浮系統(tǒng)通過運動磁場相互作用可同時提供推進力和懸浮力,相對于永磁電動式磁懸浮具有不需要附加的推進系統(tǒng),可避免產(chǎn)生機械振動,整體總量輕等優(yōu)點。與現(xiàn)有復(fù)合次級直線牽引電機相比,由于采用非磁性次級,電機法向力不再是吸引力而表現(xiàn)為懸浮力,在實際運行中,在一定范圍內(nèi)可減輕車體重量,提高運載能力。
為了深入了解非磁性次級直線電機的性能特性,本文從經(jīng)典電磁場理論分析出發(fā),建立了非磁性次級直線感應(yīng)電機的簡化二維電磁模型,并對其磁場進行了分析,得到該電機的推進力、懸浮力及次級渦流損耗解析表達式;得到了推進力、懸浮力及次級渦流損耗的特性曲線。研究了次級損耗與輸入電流幅值、頻率、轉(zhuǎn)差率之間的關(guān)系,找出較合適的工作區(qū)間。通過樣機實驗來驗證理論分析的正確性。
1 電機的電磁模型
非磁性次級直線感應(yīng)電機示意如圖1所示。電機由初級鐵心、繞組及非磁性次級(鋁板)構(gòu)成。考慮到非磁性次級直線感應(yīng)電機的結(jié)構(gòu)特點,建立其二維電磁場模型可有效減少計算量。
假定電機初級鐵心磁導(dǎo)率無窮大;氣隙磁場強度在z軸方向均勻恒定;電機初級鐵心在x軸方向與次級相對運動,y軸為懸浮方向。并用表面電流層代替初級磁勢,僅考慮基波分量忽略諧波影響。邊端效應(yīng)及齒槽效應(yīng)通過卡氏系數(shù)進行修正[7],即

式中:g為裝置氣隙長度;ge為考慮了各種主要影響因素的等效氣隙長度;Kc為消除初級開槽對氣隙中磁場分布造成影響的卡氏系數(shù);Kg為消除磁場分布y方向上分布不均的波形畸變系數(shù);Kt為補償裝置橫向邊端效應(yīng)的橫向邊端效應(yīng)系數(shù)。
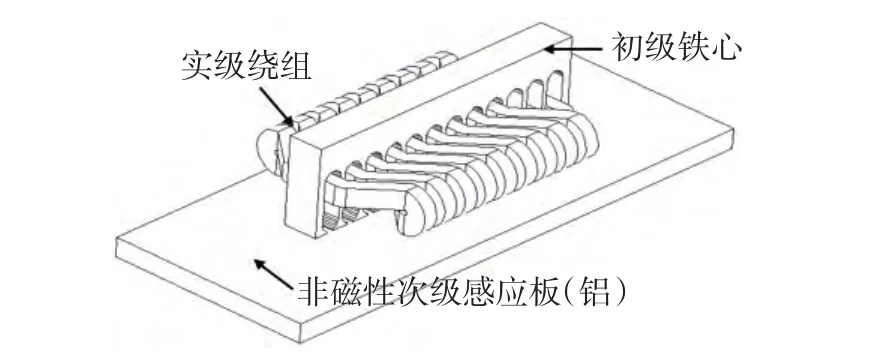
圖1 非磁性次級直線感應(yīng)懸浮電機示意Fig.1 The scheme of non-magnetic secondary linear induction maglev motor
基于以上假設(shè),在笛卡爾坐標(biāo)系內(nèi),將參考坐標(biāo)固定在初級鐵心上,建立非磁性次級直線感應(yīng)電機的二維電磁分析模型,如圖2所示。
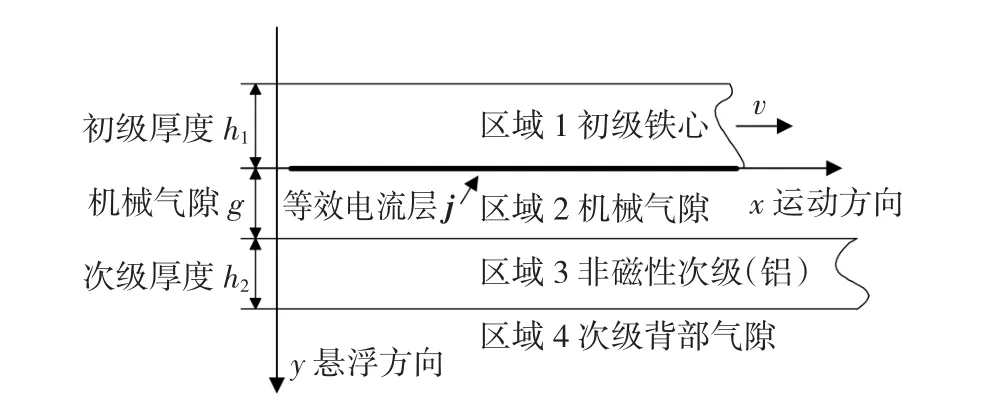
圖2 電機二維電磁分析模型Fig.2 2D electromagnetic analysis model of the motor
將分布繞組等效為電流層,初級電流層j在區(qū)域1和區(qū)域2之間,在電機初級表面。其表現(xiàn)形式[8-11]為

式中:m為初級繞組的相數(shù);W1為初級繞組每相串聯(lián)匝數(shù);kw1為初級繞組系數(shù);p為初級繞組極對數(shù);I為初級相電流有效值。
從穩(wěn)態(tài)麥克斯韋基本電磁場理論出發(fā)[12~15],則有

由歐姆定律得

結(jié)合式(3)~式(5)可得二階偏微分方程為

根據(jù)初級表面電流分布的周期性邊界條件,磁場B具有x、y分量,次級渦流在z方向流動,B、J可具有如下形式,即
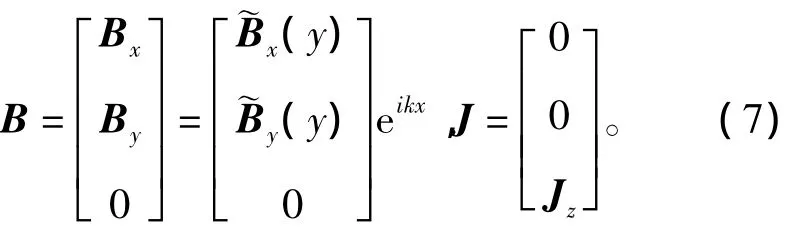
將式(7)代入式(6)得
其中,Q2=k2+ikμσv,μ、σ、v 分別為磁導(dǎo)率、電導(dǎo)率、行波線速度。式(8)和式(9)的通解為
由于不同區(qū)域的介質(zhì)條件不同,需分別求解。區(qū)域 1 中,σ1=0,μ1= μFe,Q1=k,可得

區(qū)域2 中,σ2=0,μ2= μ0,μ0=4π ×10-7N/A2為真空磁導(dǎo)率,Q2=k,可得

區(qū)域 3 中,σ3= σAl=3.8 ×107S/m,μ3= μ0,可得
根據(jù)分界面邊界條件,可確定以下方程,即
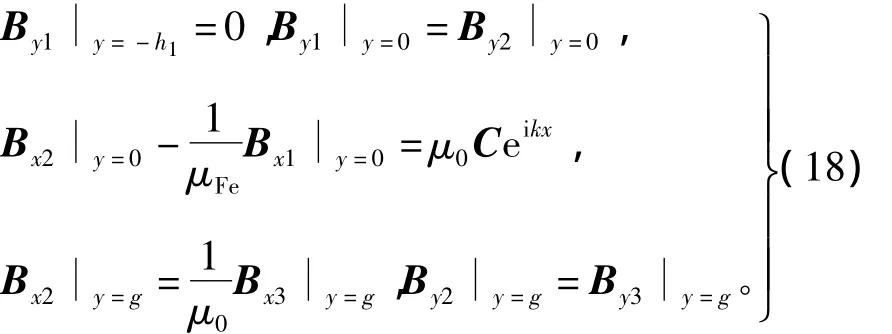
確定待定系數(shù) a1、a2、b1、b2、b3為
g為機械氣隙高度;h1為初級鐵心厚度。
2 力特性及損耗計算
由麥克斯韋張量法可確定次級所受到的推力及懸浮力,即
式中:L為電機長度;D為電機寬度;n為磁場諧波次數(shù)。
次級的渦流損耗為

式中,Vx=2τf(1-s)為電機推進速度。
3 實驗平臺及特性分析
3.1 實驗平臺及參數(shù)設(shè)計
本直線感應(yīng)電機實驗平臺主要包括直線電機本身與車載系統(tǒng)、數(shù)據(jù)采集系統(tǒng)、控制系統(tǒng)3部分。直線電機安放在輪軌車輛底部,與實驗臺板上拼接布置的非磁性感應(yīng)板相對。車輛可沿軌道行走。通過調(diào)節(jié)的車體懸掛上的螺栓,可以調(diào)節(jié)氣隙大小。推力可通過安裝在車后部的傳感器1測得。懸浮力可通過車體上傳感器2、傳感器3協(xié)同測得。非磁性次級直線電機極數(shù)為 4,極距為42 mm,槽寬為11 mm,槽高為 28.72 mm,軛部高為 25.78 mm,鐵心寬度為 11 mm,繞組匝數(shù)為 150,次級鋁板厚為15 mm,氣隙在1~20 mm范圍內(nèi)調(diào)整。電機工作電壓為380 V,最大電流為8 A。
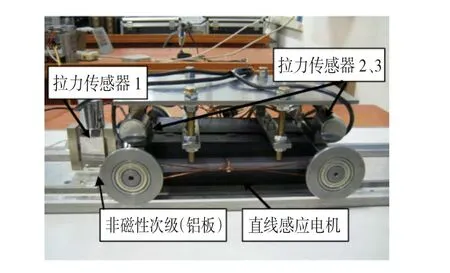
圖3 直線感應(yīng)電機實驗平臺Fig.3 Photo of experimentation vehicle
3.2 理論計算及實驗驗證
利用式(20)~式(22)可計算出電機的推力、懸浮力及次級渦流損耗,并利用Ansoft有限元軟件及實驗平臺進行有限元分析及實驗驗證。
圖4為不同幅值下電機可產(chǎn)生的推力圖。由圖4可知,轉(zhuǎn)差率為1時,電流幅值在4 A、6 A和8 A的條件下,電機推力隨著電源頻率先增大后減小。在20~40 Hz之間可達到最大值。由此可見,電機在低頻段可輸出較大推力。
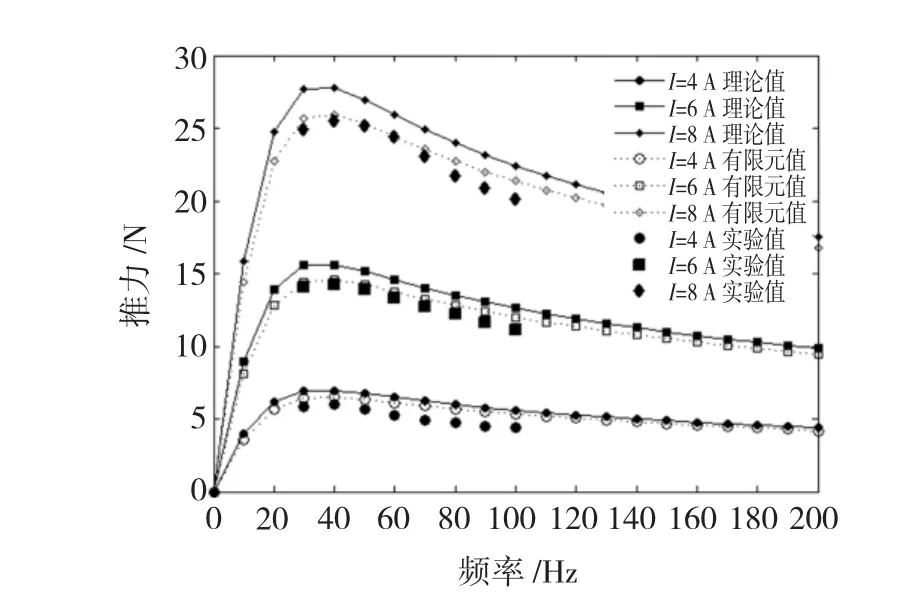
圖4 不同電流幅值下的推力Fig.4 Thrust force curve under different current
圖5為在電流幅值恒定,不同頻率的條件下,電機的推力與轉(zhuǎn)差率之間的關(guān)系。由圖5可知,電機的推力隨轉(zhuǎn)差率先增大后減小。在120 Hz條件下,推力最大值出現(xiàn)在轉(zhuǎn)差率為0.2~0.3之間。而在30 Hz條件下,推力最大值出現(xiàn)在轉(zhuǎn)差率為0.6~1之間。
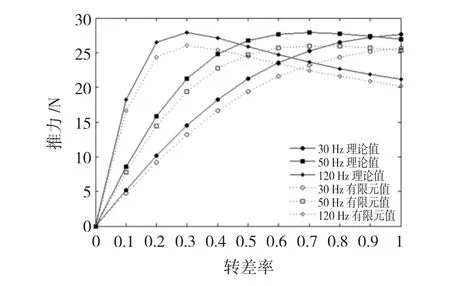
圖5 不同轉(zhuǎn)差率下的推力Fig.5 Thrust force curve under different slip
圖6為考察電流分別在4 A、6 A及8 A條件下,不同頻率電機輸出懸浮力特性。懸浮力與頻率呈單調(diào)上升關(guān)系。當(dāng)頻率增加到100~140 Hz后,懸浮力增加趨勢變緩。理論值、有限元值與實驗值之間的平均誤差分別為 7.2%和 4.3%,均滿足工程需要。
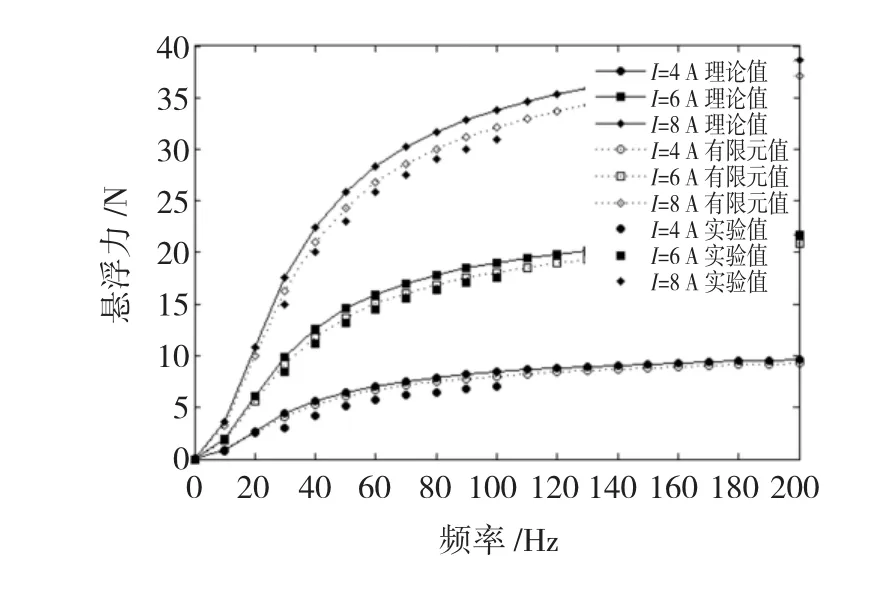
圖6 不同電流幅值下的懸浮力曲線Fig.6 Levitation force curve under different current
圖7為不同轉(zhuǎn)差率時懸浮力變化曲線。由圖7可知,在電流幅值恒定,不同頻率的條件下,電機的懸浮力隨轉(zhuǎn)差率單調(diào)增加。在轉(zhuǎn)差率為1時(堵轉(zhuǎn)時)達到最大值。
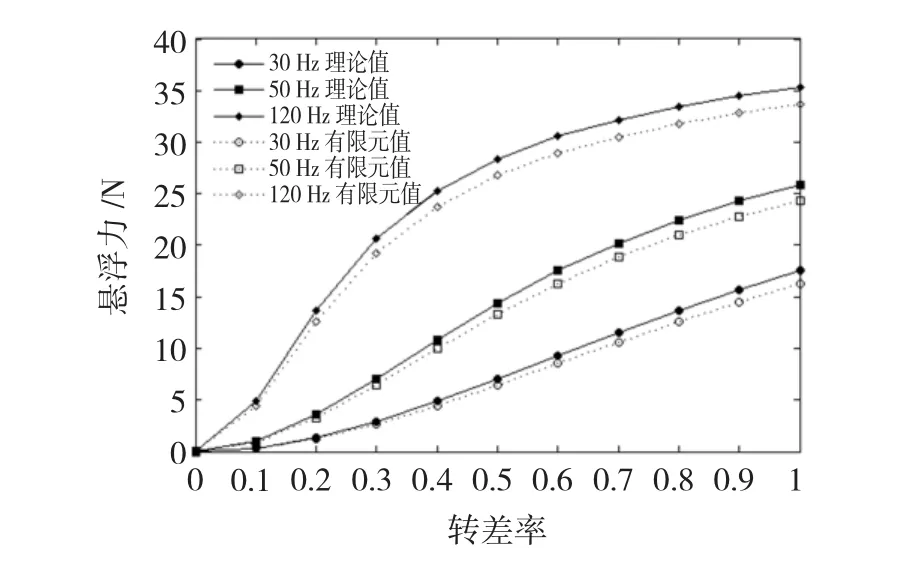
圖7 不同轉(zhuǎn)差率下的懸浮力Fig.7 Levitation force curve under different slip
圖8為電流幅值0~8 A,頻率0~200 Hz范圍內(nèi)次級渦流損耗三維特性曲線。由圖8可知,電機次級渦流損耗隨電流幅值呈平方關(guān)系快速增加;隨頻率增加單調(diào)增加,但在高頻段增加趨勢放緩。次級損耗隨頻率變化趨勢與懸浮力隨頻率變化趨勢十分接近,這是由于懸浮力主要由次級內(nèi)部渦流磁場產(chǎn)生。此結(jié)果與文獻[14]結(jié)論相似。圖9為不同轉(zhuǎn)差率下,次級渦流損耗變化曲線。由圖9可知,次級渦流損耗隨轉(zhuǎn)差率單調(diào)遞增。當(dāng)轉(zhuǎn)差率小于0.3時,即高速運行時,渦流損耗增加較為平緩;當(dāng)轉(zhuǎn)差大于0.3時,損耗增加速度要明顯加快,最大值出現(xiàn)在轉(zhuǎn)差率為1附近。此外,高頻條件下的渦流損耗遠大于低頻段的損耗。這說明單從損耗方面考慮,該類電機應(yīng)工作在中高速范圍內(nèi),這樣可以有效降低次級損耗,提高工作效率。因此,在實際應(yīng)用中,根據(jù)不同工況應(yīng)找出合適的工作點,如在中低速工況下,可選擇低頻大電流條件,此時既可實現(xiàn)較大推力和一定的懸浮力,而次級渦流損耗相對較小。
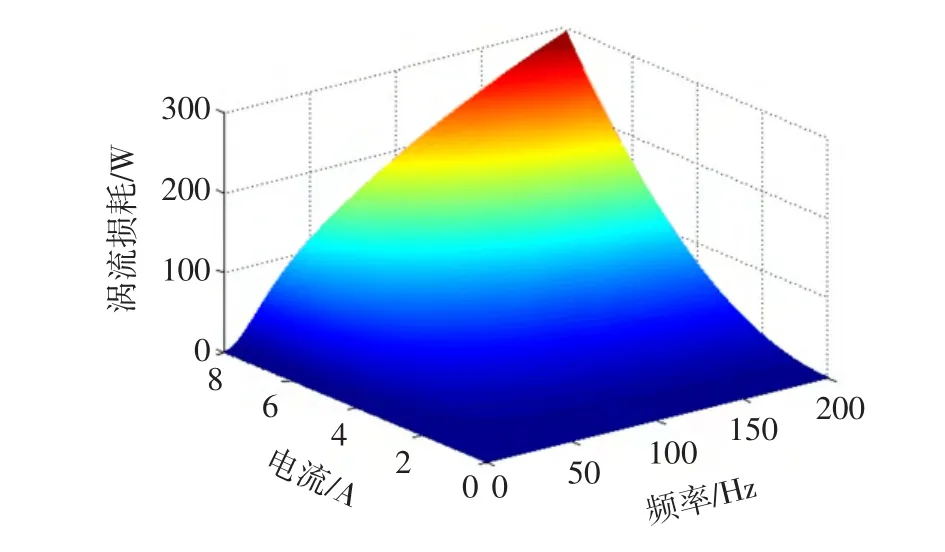
圖8 不同電流幅值、頻率下的次級渦流損耗曲線Fig.8 Eddy loss curve under different current and frequency
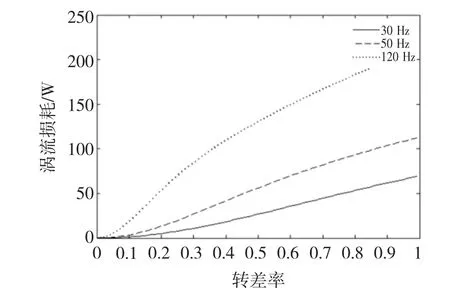
圖9 不同轉(zhuǎn)差率下的次級損耗Fig.9 Eddy loss curve under different slip
4 結(jié)語
本文研究了非磁性次級直線感應(yīng)電機的基本原理,以麥克斯韋電磁方程為基礎(chǔ),建立了直線感應(yīng)電機的簡化二維電磁模型,并對其磁場進行了分析,得到了該電機的推進力、懸浮力及次級渦流損耗的解析表達式。非磁性次級直線感應(yīng)電機與常規(guī)復(fù)合次級直線感應(yīng)電機相比,其法向力表現(xiàn)為懸浮力,這樣在實際運行中,可以減輕車體有效重量,提高運載能力。在輸入電流一定的條件下,若以輸出推力、效率為目標(biāo),電機應(yīng)工作在低頻段;若以輸出懸浮力為目標(biāo),電機應(yīng)工作在高頻段。
[1] YAN Luguang.Development and application of the magnet technology in China[C]//MT 15 Conference,Beijing,October.1997.
[2] CHEN Yaowming,F(xiàn)AN Shuyuan,LU Wieshin.Electromagneticforce analysis of the magnetically levitated motor with two directions of movement[J].IEEE Transactions on Industry Applications,2006,42(1):31-41.
[3] BIRD Jonathan,LIPO Thomas A.A 3-D magnetic charge finiteelement model of an electrodynamic wheel[J].IEEE Transactions on Magnetics,2008,44(2):253-265.
[4] BIRD Jonathan,LIPO Thomas A.Characteristics of an electrodynamic wheel using a 2-D steady-state model[J].IEEE Transactions on Magnetics,2007,43(8):3395-3405.
[5] FUJII N,OGAWA K,CHIDA M.Three dimensional force of magnet wheel with revolving permanent magnets[J].IEEE Transactions on Magnetics,1997,33(5):4221-4223.
[6] FUJII N,NONAKA S,HAYASH G.Design of magnet wheel integrated own drive[J].IEEE Transactions on Magnetics,1999,35(5):4013-4015.
[7] 張廣溢.直線電機靜態(tài)橫向邊端效應(yīng)研究[J].電機與控制學(xué)報,1999,3(2):126-128.
ZHANG Guangyi.Research on the static transverse end effect of the linear motor[J].Electric Machines and Control,1999,3(2):126-128.
[8] 朱熙,范瑜,呂剛,等.單邊盤式感應(yīng)電機的數(shù)學(xué)模型與轉(zhuǎn)矩分析[J].中國電機工程學(xué)報,2010,30(24):69-74.
ZHU Xi,F(xiàn)AN Yu,Lü Gang,et al.Modeling and torque analysis of a disc induction motor[J].Proceedings of the CSEE,2010,30(24):69-74.
[9] 朱熙,范瑜,李碩,等.旋轉(zhuǎn)磁場電動式磁懸浮裝置的狀態(tài)方程與懸浮力控制[J].電工技術(shù)學(xué)報.2011,26(12):1-6.
ZHU Xi,F(xiàn)AN Yu,LI Shuo,et al.State equations and lift force control of rotating field electrodynamic levitation device[J].Transactions of China Electrotechnical Society,2011,26(12):1-6.
[10] 秦偉,范瑜,呂剛,等.非磁性次級感應(yīng)懸浮電機磁場和力特性研究[J].電機與控制學(xué)報,2011,15(8):1-6.
QIN Wei,F(xiàn)AN Yu,Lü Gang,et al.Characteristic and magnetic field analysis non-magnetic secondary induction maglev motor[J].Electric Machines and Control,2011,15(8):1-6.
[11] LI Shuo,F(xiàn)AN Yu,ZHU Xi,et al.New structure of axial flux induction motor and characterization analysis[C]//2011 International Conference on Electrical Machines and Systems,August 20-23,2011,Beijing,China.2011:6073906.
[12] SUN Yanhua,YU Lie.Eddy current effects on radial active magnetic bearings with solid rotor[C]//8th International Symposium on Magnetic Bearing,August 26-28,2003,Mito,Japan,2003.
[13] SUN Yanhua,YU Lie.Analytical method for eddy current loss in laminated rotors with magnetic bearings[J].IEEE Transactions on Magnetics,2002,38(2):1341-1347.
[14] 朱熙,范瑜,秦偉,等.旋轉(zhuǎn)磁場電動式磁懸浮裝置的力和損耗特性分析[J].中國電機工程學(xué)報,2012,35(12):90-96.
ZHU Xi,F(xiàn)AN Yu,QIN Wei,et al.Force and loss characteristic analysis of rotating field electro-dynamic levitation devices[J].Proceedings of the CSEE,2012,35(12):90-96.
[15] 李碩,范瑜,朱熙,等.軸向磁通懸浮感應(yīng)電機的特性研究與實驗[J].電工技術(shù)學(xué)報,2012,27(9):204-209.
LI Shuo,F(xiàn)AN Yu,ZHU Xi,et al.Characteristics of an axial flux induction maglev motor and experiment[J].Transactions of China Electrotechnical Society,2012,27(9):204-209.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
數(shù)學(xué)物理學(xué)報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2017年3期)2017-05-04 07:15:09
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學(xué)學(xué)報(自然科學(xué)版)(2015年3期)2015-02-27 15:31:23