初級繞組分段永磁直線電機段間推力優化控制
2014-07-04 03:21:46李立毅祝賀劉家曦馬明娜
電機與控制學報 2014年4期
關鍵詞:系統
李立毅, 祝賀, 劉家曦, 馬明娜
(哈爾濱工業大學電氣工程及自動化學院,黑龍江哈爾濱150001)
0 引言
長行程直線電機在工業、軍事應用中有著無可比擬的優勢,由于采用直線電機直接驅動技術,省去了旋轉到直線運動中的轉換裝置,從而減小了系統的復雜度,提高了系統的精確度和可靠性[1-5]。近年來,伴隨著新型高性能永磁材料NdFeB的誕生,使得永磁同步直線電機優勢更加明顯,它具有推力密度高、重量輕、損耗低、響應速度快、可控性好等優點,可以保證直驅系統良好的品質因數[1,4,6]。但考慮當前永磁體的高昂價格,本文提出采用動磁鋼結構的短次級長初級繞組分段永磁同步直線電機,從經濟性角度考慮,它減少永磁體的使用量,節約了系統成本。從能源利用率角度看,僅需給與動子耦合的定子段供電,避免對初級繞組整體供電,有效的減小損耗,降低了逆變器容量,極大的提高了效率。另外,從維護制造的方面來看,初級分段結構還具有模塊化特點,便于加工制造、方便拆卸組裝、易于維護、應用范圍靈活等優點[1-5,7-8]。
本文研究的初級繞組分段永磁同步直線電機(primary windings segmented permanent magnet linear synchronous motor,PWS-PMLSM)是由多個在電氣上不連續的定子構成,各定子間緊密相鄰。這種結構將導致動子在運動過程中必然要跨越各個段定子,隨動子的位置變化電機的電感、磁鏈、推力系數、反電動勢系數等參數也將發生改變。而且,各段定子內的電流如果不能很好地協調控制,將會造成各段電機推力大小不均衡,使動子在跨越段間運行時產生較大推力波動,甚至使兩段電機間產生相互抵消的反向推力。在分段電機控制系統中,對電流調節的快速性、穩定性、以及段間電流的協調性將決定整個控制系統的優劣,因此本文重點要解決上述電流控制問題,達到減小段間推力波動、改善系統穩態和動態性能的目的。
本文首先根據電機的特點,提出了基于雙逆變器交替供電模式下的段間電流同步跟蹤控制策略,同時結合采用并聯積分反饋環節、定子平均電流計算、定子電壓解算、位置補償、延遲補償、參考值預測、電壓極限校正等方法的PWM預測控制來實現段間推力優化控制。最后通過實驗來驗證上述方法的有效性。
1 電機的電磁參數分析與數學模型
定子鐵心連續繞組分段的PWS-PMLSM原理如圖1所示。
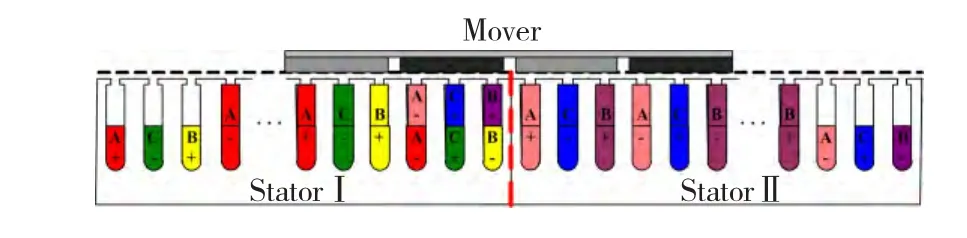
圖1 定子鐵心連續繞組分段的PWS-PMLSM原理Fig.1 Scheme of the PWS-PMLSM
本文以實驗室兩定子段樣機為研究對象,經有限元方法對樣機進行分析,得到電機的電磁參數變化規律,如圖2中磁鏈、電感參數變化曲線所示。
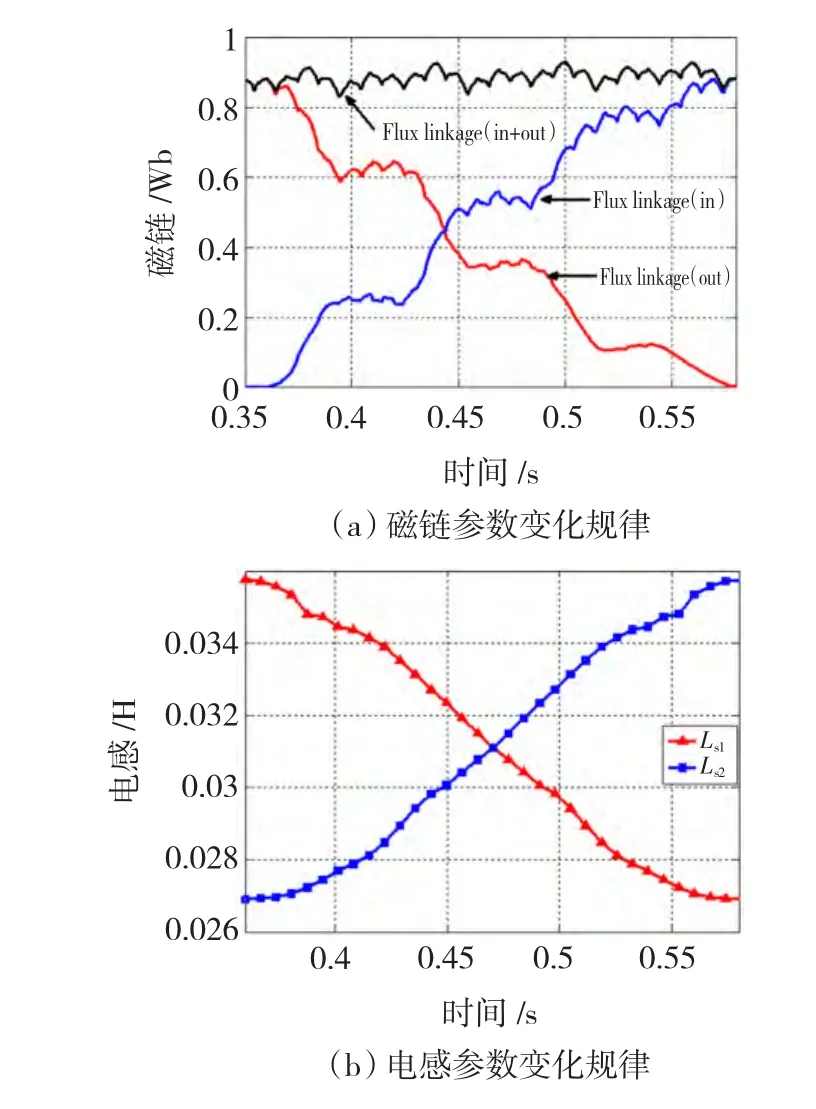
圖2 動子跨越定子段過程中的磁鏈、電感變化曲線Fig.2 Coupling flux linkage and inductance in the process of mover traverse among sators
磁鏈近似表達式為
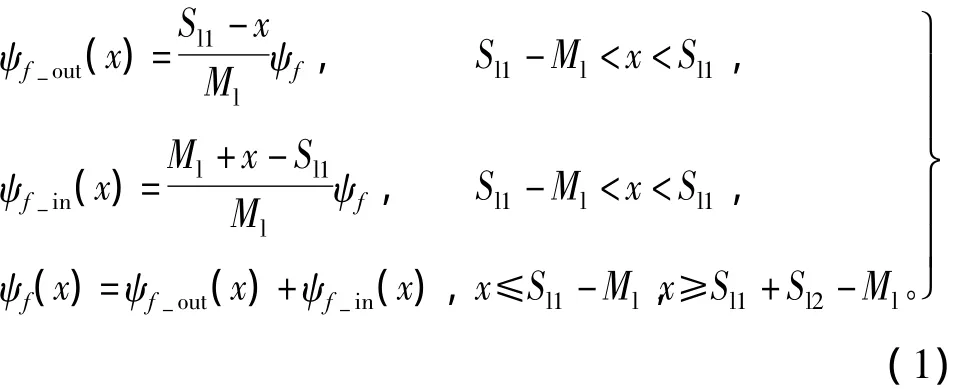
式中:x為動子的實際位置;Sl1為第1段定子的長度;Ml為動子的有效長度;ψf-out(x)為動子移出定子段時初次極耦合磁鏈變化簡化函數;ψf-in(x)為動子移入定子段時的耦合磁鏈的簡化函數;ψf為永磁體在兩段電機邊界處與定子耦合磁鏈的總和。兩段定子自感Ls1、Ls2變化規律與永磁體磁鏈類似,然而由于漏感的存在,當動子離開各段電機繞組時,電感幅值并不會完全減小到零。
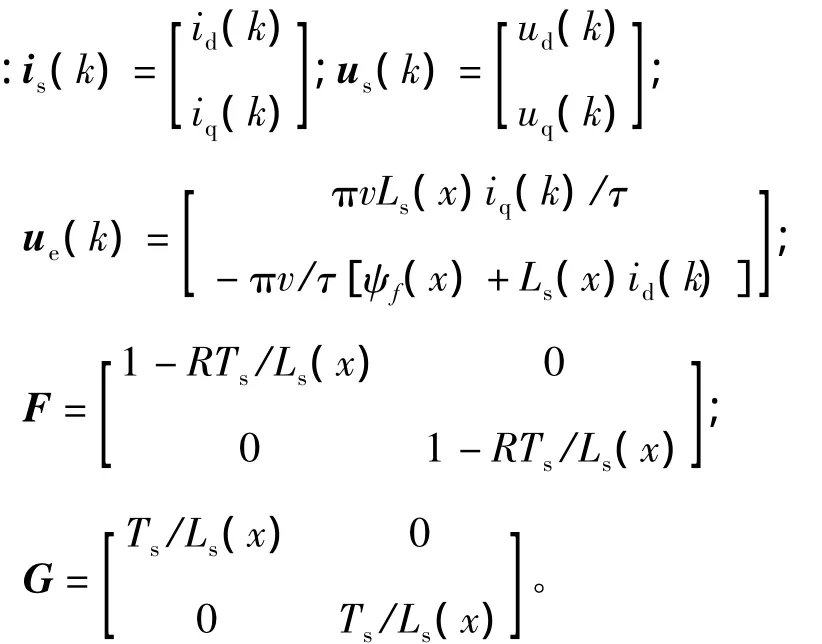
上述分析可以得到依據動子位置變化的分段直線電機在d-q軸同步坐標系下的方程為
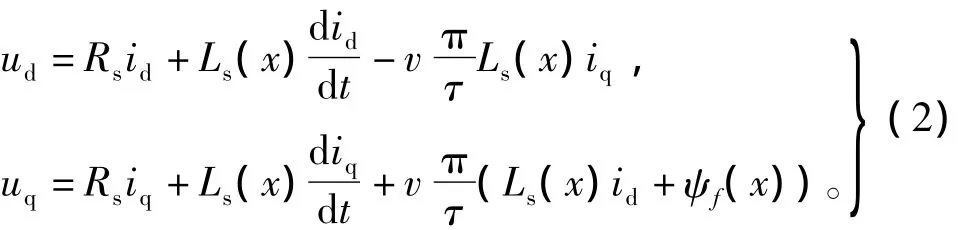
式中,Ls(x),ψf(x)為隨著動子位置變化的函數,而在非初級分段電機中它們均被視作恒值;v為動子運行速度;τ為極距。
根據矢量控制理論當采用id=0控制策略時,動子在兩段電機邊界處運動時所受推力是兩段電機的電磁推力的總和,即
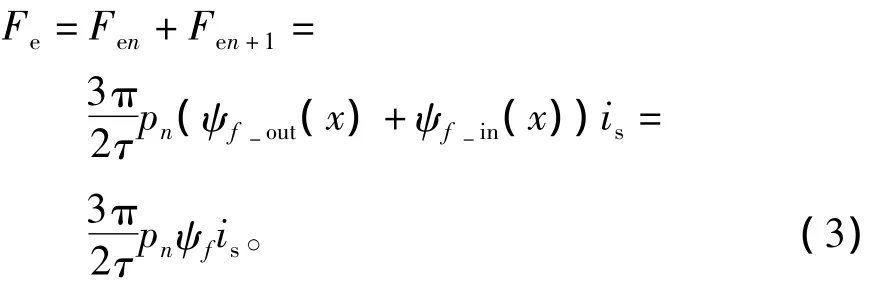
式中,pn為極對數。
2 初級繞組分段同步直線電機的段間電流同步跟蹤控制
文中采用雙逆變器交替供電策略,I號逆變器經電氣開關與奇數段定子繞組連接(I=2n-1,n=1,2,3,…);II號逆變器經電氣開關與偶數段定子繞組接(II=2n)。電氣開關的通斷由處理器負責控制。切換裝置采用電力電子器件來實現,這樣可以減小切換時間和切換過程中造成的電流波動。切換方法如表1所示。
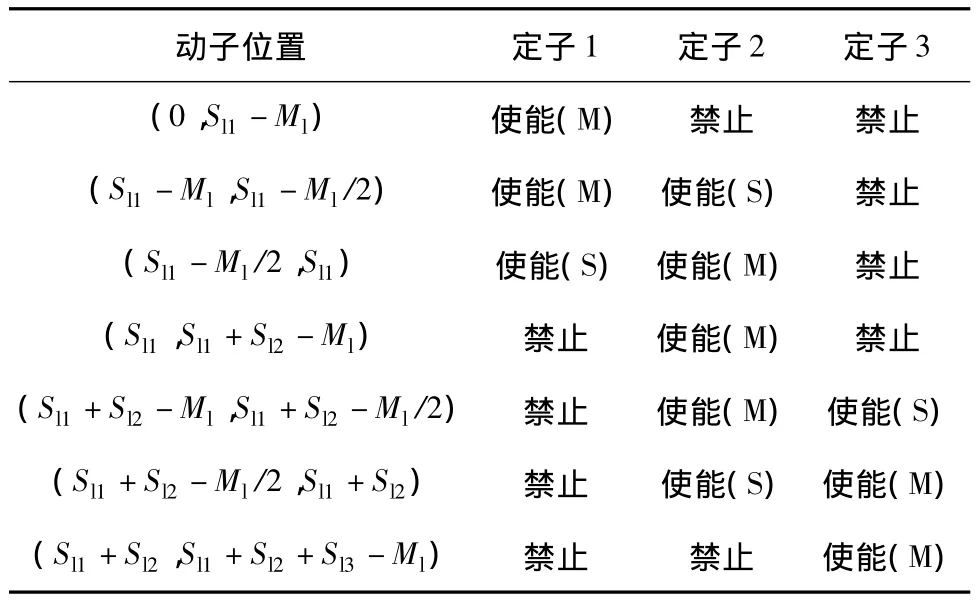
表1 電流同步跟蹤控制定子段使能表Table 1 Current synchronous tracking state
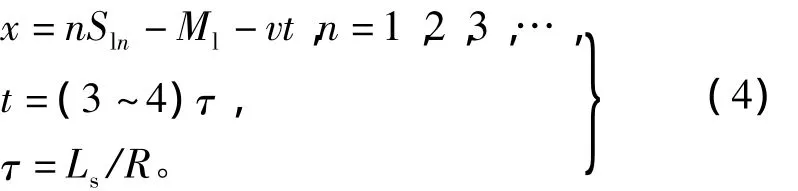
根據LR電路的原理,當動子將要到達到下一段定子邊界處時,需提前t時間或x距離給下一段電機供電,以保證下一段定子電流穩定后接入系統,切斷供電的定子繞組利用反相并聯的續流二極管釋放繞組線圈內的電流。定子供電切換時間與動子位置的關系表達式為
由式(3)、式(4)可以得出,通過合理的控制相鄰兩段定子繞組內的電流,就可以使兩段的電磁推力之和保持平穩,如段內運行一樣。
如果系統指令電流同時作為相鄰兩段定子的參考電流,由于各段定子控制器的動態響應能力的差異,將導致兩段定子內的實際電流與系統給定的電流間都會有一定的誤差和延遲,這樣一來,就會使兩定子段內的電流間產生更大差異、延遲,從而導致電機兩段定子的勵磁電流不完全同步,使得動子在跨越定子段的過程中會產生不可避免的推力波動。因此,本文提出相鄰段間電流同步跟蹤控制,段間電流同步跟蹤控制原理如圖3所示。
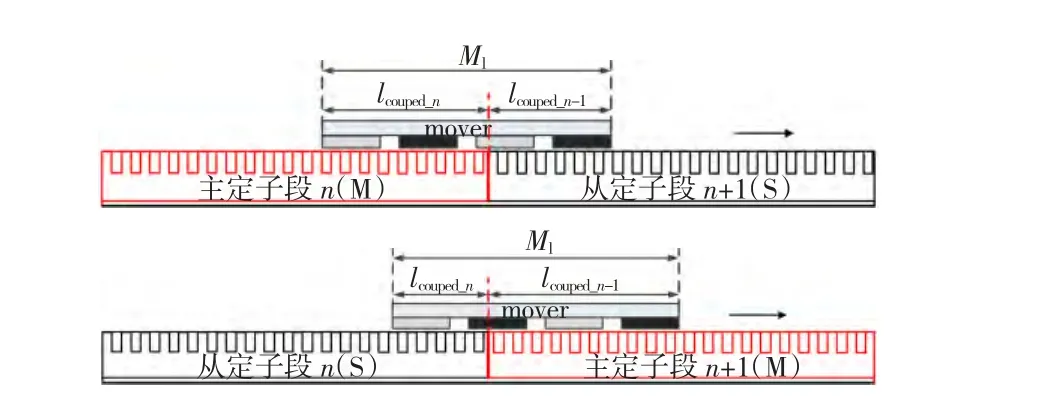
圖3 段間電流同步跟蹤控制原理Fig.3 Schematic diagram of the inter-segment current synchronous tracking control
如圖3所示,根據動子與各定子段的耦合程度,確定主段定子lcouped>Ml/2和從段定子lcouped<Ml/2,lcoupled為動子與各定子段的耦合長度。在動子運動過程中,主-從定子段是隨動子的位置變化而交替改變的,交替規律見表1。在動子穿越兩相鄰定子段交界處時,要求從定子段電流實時同步跟隨主定子段的電流。該方法的優點是主-從段定子相互交替跟蹤,可以實現從定子段內的電流實時與主定子段的電流同步,極大地減小各段間的電流差異,有效地抑制了段間推力波動,為動子在段間的平穩運行提供了保證。但在從定子段跟蹤主定子段的過程中,由于從定子段的參考電流是主段中的實際電流,而它本身就含有一定的電流紋波,因此從定子段的電流紋波將更大一些。

式中:iM-ref為主定子段電流參考值為系統參考電流;iS-ref為從定子段的參考電流;iM-fed為主定子段實際電流。
3 改進的PWM電流預測控制及其在分段電機中的應用
3.1 分段電機電流預測控制模型
由于段間電流同步跟蹤控制是以高電流響應能力為基礎的,因此本文選擇基于電機模型理論的PWM電流預測控制算法[8-12]來提高電流響應速度,更好地實現段間電流跟蹤控制效果。
當采用數字處理器進行控制時,對系統的連續狀態空間表達式(2)進行離散化,依據當前的實際電流在系統采樣間隔Ts條件下的離散狀態表達式,可以求出[k+1]th時刻定子段中的d-q軸電流,即is(k+1)的時域解為

如果系統采樣時間Ts足夠小,能夠滿足香農采樣定理的要求,上式就可以簡化為

式中
如果令is(k+1)-(k+1)=0,即使用[k+1]th時刻的系統參考電流(k+1)取代表達式(8)中的is(k+1),就可得出需加在逆變器上的電壓,即

式(8)是電流預測控制的基本原理,理論上定子電流在第[k+1]th控制周期完成對指令電流的無差跟隨,即在一個控制周期內完成零電流誤差控制。
3.2 電流預測控制算法的改進與優化
在實際應用中,由于現有數字處理器(digital signal processing,DSP)的硬件結構及工作原理的限制,如采樣轉換時間、PWM信號更新延遲、數字濾波以及保持器的使用等,將導致如下問題產生。系統期望在[k]th控制周期開始對各信號進行采樣,在[k-(k+1)]th時間內完成對的計算,然后在[k+1]th周期生成控制控制電壓,并產生 PWM控制信號。但由于PWM信號更新延遲的問題,即DSP中的PWM信號更新必須要與控制周期同步執行,所以要等到[k+2]th時刻才可以應用到逆變器上。整個采樣、計算、執行過程需要延遲兩個控制周期才完成,也就是[k+2]th時刻才能使實際電流跟隨上指令電流。這就當于在控制系統中引入一個滯后環節,改變了系統的零極點,將會影響到控制系統的帶寬,甚至會導致系統震蕩發散。
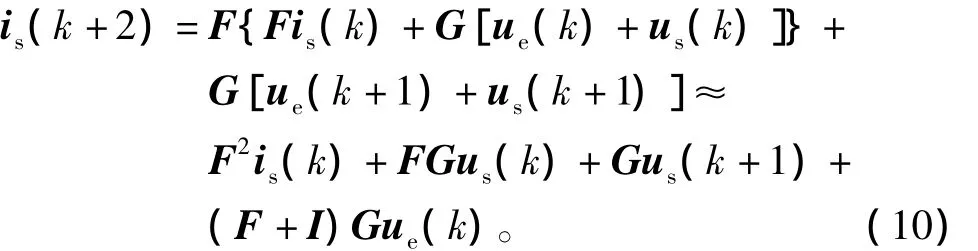
為了消除數字控制系統這一固有延遲,提高預測控制器的性能,必須對此延遲環節加以補償。假定被選擇的電壓矢量在[k+1]th時刻應用,就需要去預測[k+2]th時刻的電流值。將式(7)向前推算一個PWM周期,則可推導出[k+2]th時刻的電流預測值為

由式(9)可以看出,兩周期之后的電流矢量is(k+2)是由前一時刻的電流矢量和電壓矢量共同決定的,所以將式中的[id(k+1),iq(k+1)]T用式(8)替代,并近似的認為ue(k)=ue(k+1),可推導出is(k+2)、is(k)和 us(k+1)的關系式,即
根據式(10)就可估算出在第k+1時刻實施到逆變器上的控制壓[(k+1)(k+1)]T,即

這時令is(k+2)=(k+2),這里(k+2)是當前時刻估算得到的[k+2]th時刻參考電流矢量,帶入式(11)就是系統延遲補償的PWM電流預測控制。
延遲補償PWM預測控制的思想,不僅關注被控對象下一時刻的預測值,還要對目標值進行超前預測,也就是不但要使實際的電流值盡可能接近參考電流值,還要獲得準確的參考電流值來實現延遲補償。如果希望在[k+2]th時刻的電流矢量預測值與該時刻電流矢量給定值相同,就需要在[k]th時刻對[k+2]th時刻的參考電流矢量進行提前兩步預測,來獲取準確的[k+2]th時刻參考電流矢量。
在控制周期Ts為恒定值的前提下,可以使用拉格朗日拋物線二階插值法或線性插值法,依據當前時刻參考電流矢量和先前時刻的參考電流矢量,求出下一拍的預測電流參考矢量。
二階插值法為

根據式(12)在再向后預測一拍可以得到

對于采樣周期Ts足夠小的系統,可也近似的認為

選擇不同的參考電流預測法,將會對定子電流的暫態響應速度、相位延遲及超調量等方面產生不同的影響,可以根據具體情況而定。
PWM電流預測算法還存在對系統參數變化過于敏感,對電機模型依賴度高,受直流母線電壓波動、定子電壓極限以及開關死區時間影響等問題。它們都會影響控制精確度,曾加系統的不穩定性。
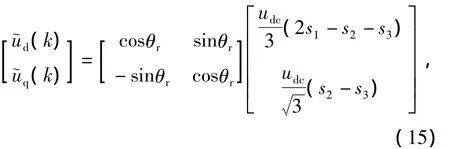
考慮到逆變器開關死區時間的存在,每個控制周期內作用在電機定子上的實際電壓值與理想值us(k)并不相等,所以直接使用us(k)進行計算是不準確的。為解決這一問題,可以利用相電壓重構法,通過直流母線電壓udc和逆變器開關信號(s1,s2,s3)的占空比求得dq坐標系下的電壓精確值s(k),即
考慮到SVPWM算法的基本原理,每個控制周期內的電壓值是開關信號在一個周期內的平均作用效果,所在計算定子電阻壓降和反電勢電壓時也需要采用一個周期內平均值來計算。根據[k~k+1]th和[k+1~k+2]th控制周期內電樞電流呈線性變化的規律,則每個控制周期內的平均電流表達式,可以通過式(16)近似得到,即
用式(16)替代式(10)中的is(k+1),is(k+2)最終可以得到

根據延遲補償電流預測控制算法的原理,控制系統是在[k]th控制周期對電機位置進行采樣得到動子位置信號,[k+1]th時刻計算出參考電壓(k+1),需要等到[k+2]th控制周期實施。從位置采樣到控制電壓實施的過程中,動子位置的偏差信號,并將它將其轉換成位置角后為
由式(18)可以看出,當電機控制周期Ts較短,或運行速度v較小,或電機磁極對數pn不多時,這一偏差可以忽略不計。當電機高速運行時,對于高速高性能控制系統而言,這一角度偏差則不可忽視(可以達到幾十度的電角度誤差),否則會使控制效果變差,導致電流波動。為此在計算(k+1)的過程中需要對動子位置角進行補償,位置補償角Δθoffset的計算方法為

對于電機系統參數變化或參數測量誤差,以及直流電壓波動的影響,尤其是在分段電機中,各段間電磁參數變化劇烈很難取得良好的控制效果。為了減小這些因素對控制系統的影響,本文采用帶有并行積分補償環節的PWM電流預測跟蹤控制。在電機啟動/停止或動態運行過程中,僅預測控制環節工作,從而提高系統動態響應性能。當電機處于穩態運行時,積分環節和預測環節同時工作,由積分補償環節來抑制系統參數變化或直流母線電壓波動對控制系統精確度的影響,即由積分補償環節來消除穩態電流的累積誤差,兩個環節的輸出電壓值之和作為控制電壓驅動逆變器工作,即
式中:Ureal(k)為實際加在逆變器上的控制電壓;uerror(k)為在系統參數改變或系統模型不準確條件下的電壓預測值;Δuoffset(k)為積分校正環節輸出的補償控制電壓。
最后,經計算得到的理想控制電壓Ureal(k+1)并不可以直接加在逆變器上。因為當系統的給定值發生劇烈變化時,這一理想電壓的幅值可能會超過逆變器提供的電壓極限,此時就要對控制電壓進行校正。由于受到三相逆變器線性調制范圍的限制,當直流母線電壓為udc時,經坐標變換后,在同步旋轉軸系下所能提供的最大值電壓僅為

如果式(20)計算出同步旋轉軸系下的電壓值[ud(k+1),uq(k+1)]T不符合式(21),就需要對它們進行如下校正,即
3.3 控制系統總體結構
基于SVPWM的分段電機電流同步預測蹤控制系統主要由速度調節器、兩組逆變器及控制它們的兩組電流預測控制器構成。當動子運行時,先由主-從判定器來確定各段定子的主從關系,主段定子段電流預測控制器的輸入信號包括速度調節器輸出的q軸參考電流值,再經插值計算得到它下兩拍的估算值、動子速度反饋值和該段自身的d-q軸的電流采樣值。從定子段的預測電流控制器的輸入信號包括主定子段的q軸實際電流經過插值計算得到的下兩拍的電流估算值、動子的速度反饋值及自身的d-q軸電流采樣值。從而實現了彼此交替預測跟蹤,完成段間電流同步無誤差控制。各定子段的d軸電流均采用id=0方式。兩組逆變器與各段定子的連接使能,也由基于位置傳感器的定子段選擇器來裁決。在奇數段和偶數段控制器的電流控制環節上分別并聯了一個積分補償回路,用以消除穩態誤差提高系統魯棒性。補償模塊由兩組積分器構成,它們的輸入分別為交直軸的誤差分量。補償回路經積分運算后得到的電壓補償值Δud、Δuq與預測模塊的輸出電壓ud,uq分別求和,經電壓校正環節輸出到逆變器上,帶有積分補償通道的段間電流預測跟蹤控制原理如圖4所示。
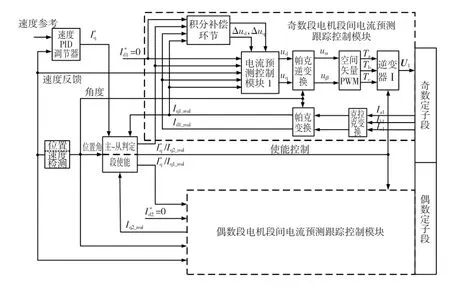
圖4 帶有積分補償通道的段間電流預測跟蹤控制原理Fig.4 The block of inter-segment current tracking and predictive control with the loop of integral compensation
4 系統仿真測試
4.1 動子移出定子段過程仿真
仿真條件為:PWM頻率為20 kHz;速度指令為3 m/s;負載推力為200 N。圖5為單段定子運行仿真效果。
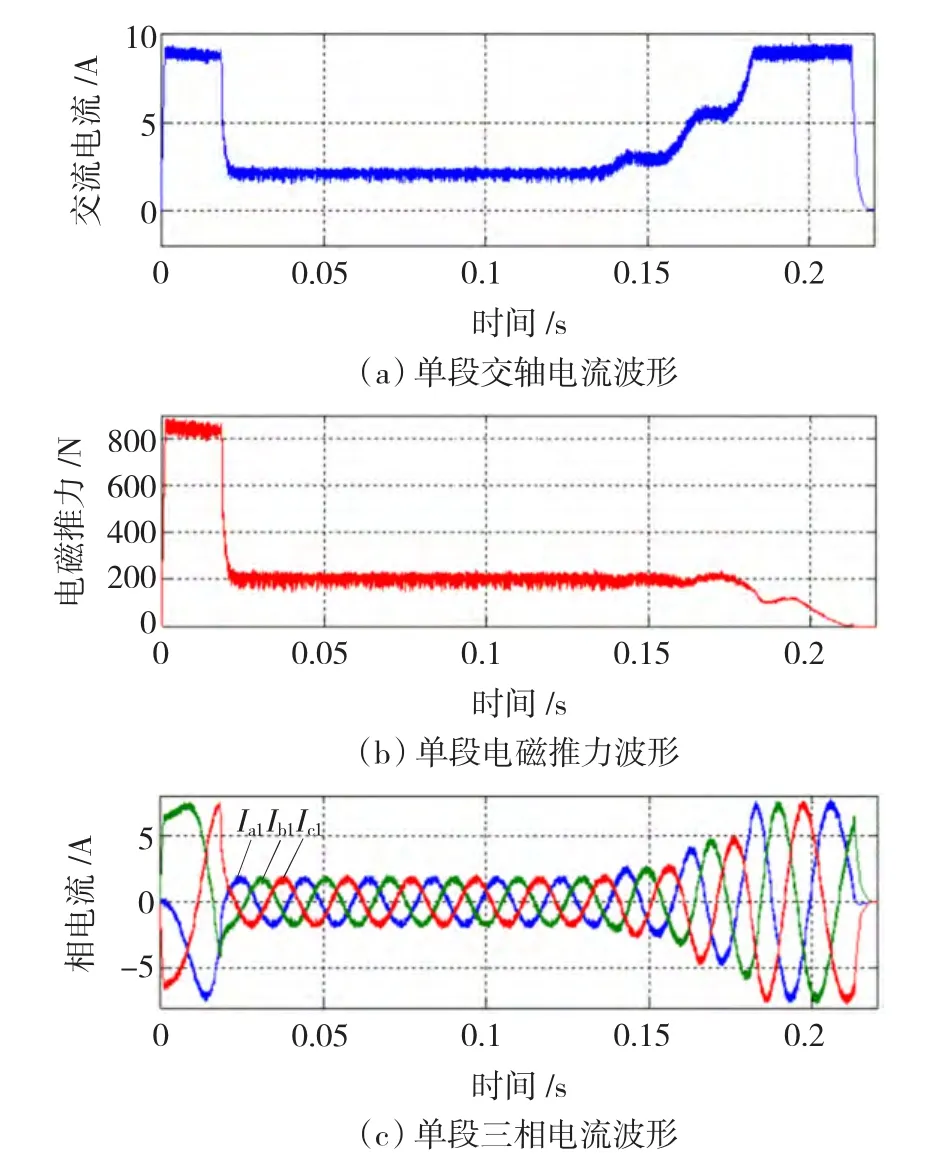
圖5 單段定子運行交軸電流、電磁推力、三相電流仿真圖Fig.5 Simulation of q-axis current,electromagnetic force and three-phase current curves when mover runs on stator
圖5(a)為單段定子的交軸電流變化曲線,隨著動子的逐漸移出該段定子,即0.14 s時刻開始,為了維持恒定的電磁推力,交軸電流幅值不斷加大,最終達到輸出限幅值。從圖5(b)中可以看出,在0.14~0.165s時間內可以依靠提高交軸電流幅值來保持推力平穩,但隨著動子與這段定子的耦合程度不斷減小即從0.165 s開始,僅依靠提高定子的交軸電流幅值也無法到達平穩的推力。當動子最終移出該段時,該段產生的電磁推力變為零。圖5(c)為該定子段三相電流曲線,它與交軸電流變化規律相似。
4.2 段間電流跟蹤控制算法對比分析
系統仿真條件為:PWM頻率為20 kHz;速度指令為3 m/s(0~0.25 s)和 -3 m/s(0.25~0.5 s);負載推力為恒定400 N。圖6(a)和圖6(b)均為未采用段間電流跟蹤控制的電流預測控制仿真效果;圖6(c)、圖6(d)、圖6(e)為采用段間電流跟蹤控制的仿真效果。
圖6(a)表示動子在跨越相鄰兩段定子時,它所受到的兩段電機的電磁推力及合力曲線,F1為第一段電機產生的電磁推力,F2為第二段定子產生的電磁推力,F1+F2為兩段定子推力之和的擬合曲線。從圖中不難看出,在動子跨越段過程0.14~0.21 s,0.35~0.42 s兩段電機的電磁推力之和會產生明顯的波動。圖6(b)表示的是兩段電機的交軸電流變化曲線,仿真效果反應出,兩段電機的交軸電流并不完全一致,這一點與前文的理論分析完全吻合,兩段電流會有一定的偏差,恰恰就是這一偏差導致了段間推力波動的產生。
從圖6(c)中可以發現動子在跨段過程中幾乎無推力波動。從圖6(d)中觀察得到,從定子段的q軸電流紋波比主定子段的稍微大一些,這是因為從定子段的參考電流本身就存在一定的紋波,但兩段定子的電流中心線 (水平虛線)還是保持一致,因此不會產生圖6(a)中那樣明顯的推力波動。圖6(e)為三相電流交替跟蹤的效果,在t1~t3(0.14~0.21 s),t4~t6(0.35~0.42 s)跨段過程中兩組三相電流的同步程度很好。
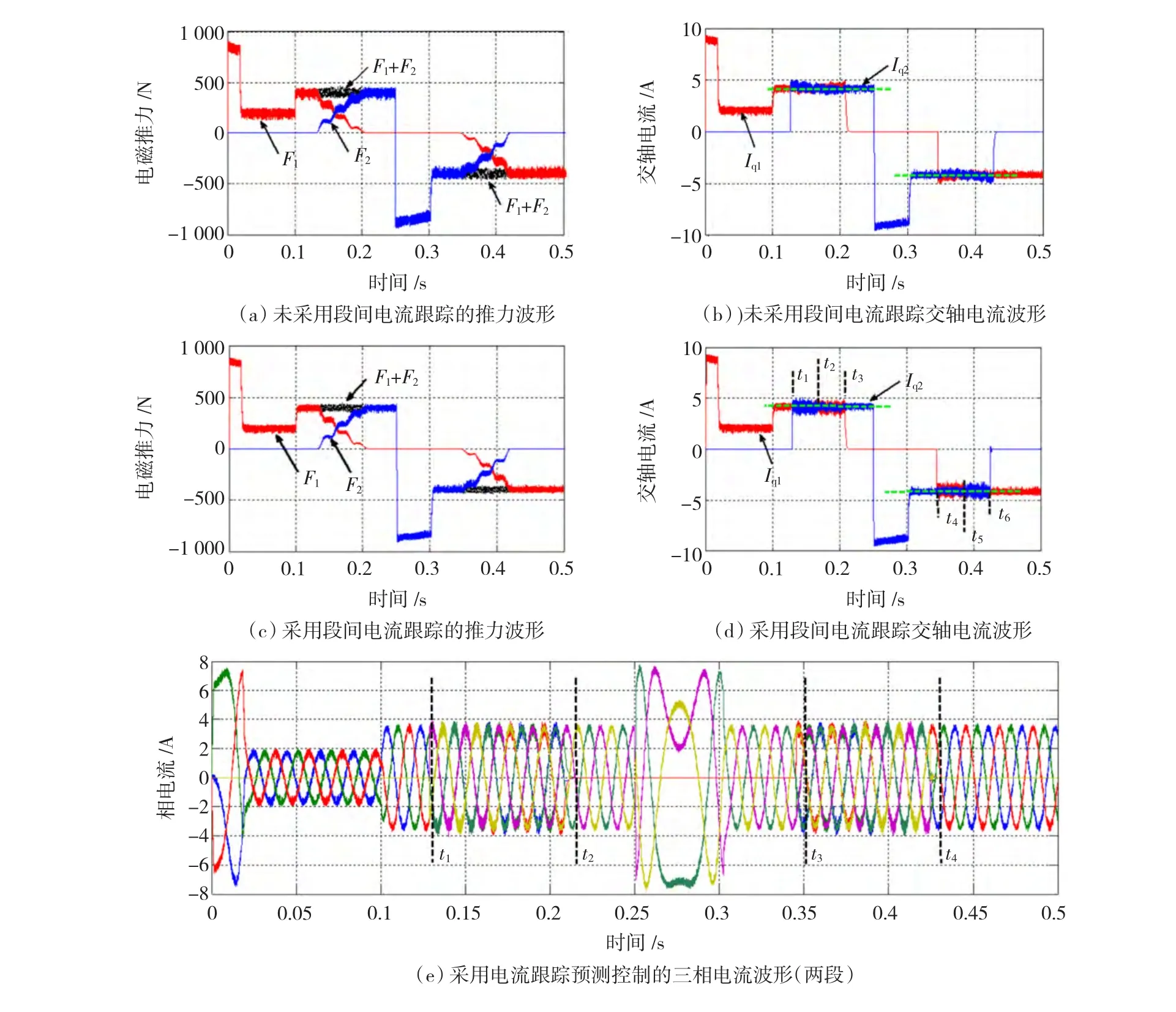
圖6 未采用/采用電流同步跟蹤預測控制方法電機運行效果對比Fig.6 Simulation of predictive control without and with inter-stator current synchronous tracking control
4.3 改進電流預測算法的動態響應性能仿真
為驗證本文所提出的改進電流預測控制算法的動態性能,系統仿真運行條件為:PWM頻率為20 kHz;負載推力為80 N;指令電流信號在0.1 s時從1 A跳變到2 A,采用改進的電流預測控制算法進行仿真測試。圖7(a)為指令電流發生跳變時定子段中實際電流的跟隨效果,圖7(b)為其局部放大圖。由圖7(b)可見,實際電流經過0.1 ms就完全跟隨上指令電流,整個工作過程在兩個控制周期內完成。傳統的PI電流調節方式則很難達到如此高的動態響應能力,還將不可避免地產生振蕩調整過程和較大的超調量,而預測控制則避免這樣的問題。
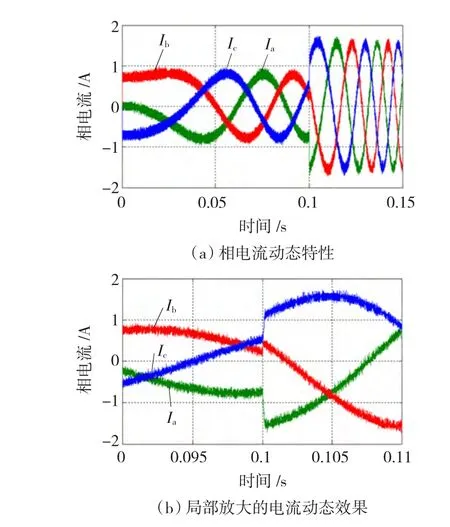
圖7 改進后的電流預測控制算法暫態仿真效果曲線Fig.7 Effect of improved predictive control under the transient performance
5 系統實驗測試
為了驗證本文所提出的控制方法,以一臺隱極式PWS-PMLSM為控制對象,電機具體結構如圖8所示。電機主要參數為:每段定子長度為0.6 m;動子長度為0.24 m;定子電阻為50 Ω;初次極完全耦合時定子電感值為35.8 mH;動子完全移出后定子電感為28 mH;電機極數為4;動子質量為5 kg;永磁磁鏈為0.88 Wb;直流母線電壓為300 V。
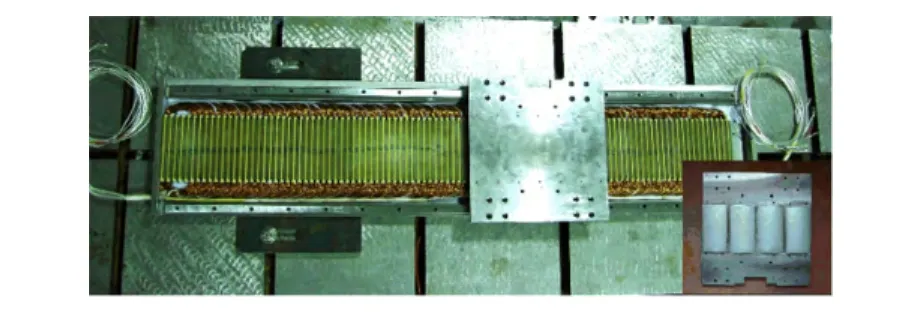
圖8 實驗樣機結構Fig.8 Outline of experimental device
控制系統采用TI公司的TMSF28335DSP控制芯片為核心,系統控制頻率(中斷、采樣、PWM)為10 kHz,逆變裝置采用兩塊三菱公司的IPM模塊,位置檢測裝置是具有1 mm精確度的GIVI磁柵尺。首先是對一段定子,包括動子逐漸移出該段的運行效果進行試驗測試。控制方法采用基于SVPWM調制方式的電流預測算法。
5.1 單段定子運行實驗
從如圖9所示的單段電機運行三相電流的實驗波形中可以看出,當動子逐漸移出該定子段的過程中(第二段is2=0)的情況下,其運行效果與仿真結果完全吻合,充分說明了算法與模型的準確性。
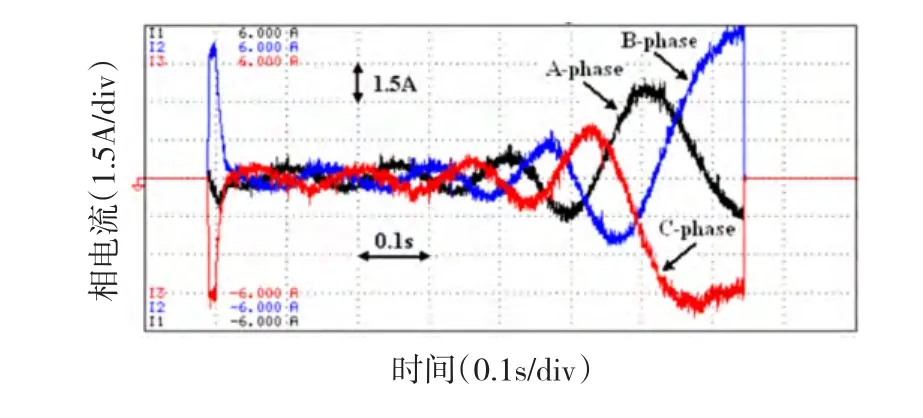
圖9 單段電機運行三相電流效果Fig.9 Experiment of three-phase current curve when mover runs on single stator
5.2 未加系統延遲補償及相關改進算法的傳統電流預測控制
圖10為未加改進的電流預測控制實驗效果,控制系統速度環節采用PI控制,而電流環節采用傳統的電流預測控制算法。系統以2 m/s的勻速運行,圖10(a)為第一段電機的三相電流波形(包括啟動過程),圖10(b)為第二段電機的三相電流波形(包括動子進入這一段的過程)。從實驗結果中不難看出,未采用系統延遲補償和相關優化算法的條件下,系統電流文波較大,震蕩明顯,穩態誤差大,控制效果不佳。

圖10 未加改進的電流預測控制實驗效果圖Fig.10 Experiment of three-phase current curves of conventional PWM predictive current control
5.3 算法改進后的預測電流控制
圖11為改進后的電流預測控制實驗效果,圖11(a)為第一段定子中的三相電流,圖11(b)為第二段定子中的三相電流。從實驗結果中可見,動子在運動過中各段定子三相電流變化平穩,動子跨越段邊界過程中第二段電流跟蹤速度快,幾乎無抖動和超調現象,整個過程中電流文波較小,效果明顯優于傳統的電流預測控制方法。

圖11 改進后的電流預測控制實驗效果Fig.11 Experiment of three-phase current curves of improved PWM predictive current control
6 結語
針對改進的電流控制算法及段間電流交替跟蹤策略,分別在系統動態響應能力、穩態性能和抑制動子跨段過程中的段間推力波動等方面進行研究。通過仿真和試驗的方法對各算法進行驗證,并取得了一致的效果。經驗證得到,段間電流跟蹤控制可以有效地抑制動子跨段過程中的推力波動。改進的電流預測控制,在提高系統動態響應能力和穩態運行效果上有著明顯的優勢,也給段間電流交替跟蹤策略提供了基礎。兩者的有機結合使得初級分段式永磁同步電機的運行效果得到了極大的提升,初步克服了初級繞組分段結構對電機運行的影響。
[1] 上官璇峰,勵慶孚,袁世鷹,等.不連續定子永磁直線同步電動機運行過程分析[J].西安交通大學學報,2004,38(12):1292-1296.
SHANGGUAN Xuanfeng,LI Qingfu,YUAN Shiying,et al.Analysis on running process of permanent linear synchronous motors with discountinuous stators[J].Journal of Xi’an jiaotong University,2004,38(12):1292-1296.
[2] LEIDHOLD R,MUTSCHLER P.Speed sensorless control of a long-stator linear synchronous motor arranged in multiple segments[J].IEEE Transactions on Industrial Electronics,2007,54(6):3246-3254.
[3] SUZUKI K,KIM Y J,DOHMEKI H.Driving method of permanent-magnet linear synchronous motor with the stationary discontinuous armature for long distance transportation system[J].IEEE Transactions on Industrial Electronics,2012,59(5):1090 -1095.
[4] 上官璇峰,勵慶孚,袁世鷹.多段初級永磁直線同步電機驅動的垂直提升系統[J].中國電機工程學報,2007,27(18):7-12.
SHANGGUAN Xuanfeng,LI Qingfu,YUAN Shiying,The vertical hoist system driven by PMLSM with multi-segment primary[J].Proceedings of the CSEE,2007,27(18):7 -12.
[5] KINJIRO Yoshida,HIROSHI Takami,AKIHIRO Fujii.Smooth section crossing of controlled repulsive PMLSM vehicle by DTC method based on new concept of fictitious section[J].IEEE Transactions on Industrial Electronics,2004,51(4):821-826.
[6] ROVERS J M M,JANSEN J W,LOMONOVA E A.Novel force ripple reduction method for a moving-magnet linear synchronous motor with a segmented Stator[C]//Proceeding of the 11th International Conference on Electrical Machines,October 17 - 20,2008,Wuhan,China.2008:2942-2947.
[7] PIAO A H,KOHNO B S,SUZUKI C K,et al.Development of the change circuit of the inverter of intermittent stator PM-LSM[C]//15th International Conference on Electrical Machines and Systems,October 21-24,2012,Sapporro,Japan.2012:6401852.
[8] 洪俊杰,李立毅.基于電流誤差矢量的繞組分段永磁直線同步電機電流預測控制[J].中國電機工程學報,2011,31(30):77-84.
HONG Junjie,LI Liyi.Current error vector based prediction control of current in segment winding PMLSM[J].Proceedings of the CSEE,2011,31(30):77-84.
[9] SPRINGOB Lothar,HOLTZ Joachim.High bandwidth current control for torque-ripple compensation in PM synchronous machines[J].IEEE Transactions on Industrial Electronics,1998,45(5):713-721.
[10] MOON Hyung-Tae,KIM Hyun-Soo,YOUN Myung-Joong.A discrete-time predictive current control for PMSM[J].IEEE Transactions on Power Electronics,2003,18(1):464 -472.
[11] MOREL Florent,XUEFANG Lin-Shi,RETIF JeanMarie.A comparative study of predictive current control schemes for a permanent magnet synchronous machine[J].IEEE Transactions on Power Electronics,2009,56(7):2715 -2728.
[12] 瞿博,洪小圓,呂征宇.模糊控制在三相PWM整流器無差拍控制中的應用[J].中國電機工程學報,2009,29(15):50-54.
QU Bo,HONG Xiaoyuan,LU Zhengyu.Application of fuzzy control theory to deadbeat control scheme in three-phase pluse width modulation rectifier[J].Proceedings of the CSEE 2009,29(15):50-54.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32