電子戰無人直升機抵近支援干擾仿真研究
2014-07-11 07:54:58程彥杰毋曉鶴
航天電子對抗 2014年2期
程彥杰,毋曉鶴,徐 宙,劉 分
(中國洛陽電子裝備試驗中心,河南 洛陽 471003)
0 引言
目前,隨著雷達技術的飛速發展,現代雷達已經具有窄波束、低副瓣的特點,其天線副瓣輸出的電平一般很低,電子戰飛機遠距離的副瓣干擾往往難以達到理想的干擾效果,同時雷達還具備副瓣對消、頻率捷變和副瓣匿隱等多種反干擾措施[1],使得電子戰飛機的隨隊掩護干擾或遠距離支援干擾的效果大大減弱,甚至失去作用。而攜帶有雷達干擾載荷的電子戰無人直升機憑借其身小靈便、機動性強,可利用山嶺地物做掩護縱深突防,飛臨敵方前沿或側翼,低空懸停、瞄準干擾,干擾信號能直接進入敵方雷達接收機主瓣和副瓣,有效地抑制了副瓣對消、副瓣匿隱等多種雷達反干擾措施,贏得了“空中靈巧魔爪”的美譽,彌補了超近距離干擾掩護攻擊機群的作戰配置空缺,在電子戰領域的地位作用也越來越突出。
1 電子戰無人直升機抵近干擾雷達的優點
電子戰飛機一般體積較大、造價昂貴,有專業的飛行員和操作員,對抗作戰一般都采取遠距離支援干擾或者隨隊掩護干擾,雖然干擾覆蓋面廣,但是干擾目的性差,對于大多新式雷達比如相控陣雷達,干擾效果不佳。同時大型飛機機動性差,不能夠靈活應變;有人駕駛顧忌較多,相對危險的空域不能夠及時進入并有效實施壓制干擾。
同傳統的電子戰飛機相比,電子戰無人直升機抵近雷達實施干擾具有以下優點:
1)無人直升機體積小、質量輕、造價低、效費比高,而且無需駕駛員進行機上操作,不存在人員傷亡。因此,電子戰無人機抵近目標執行任務幾乎沒有后顧之憂。
2)無人直升機無需任何輔助起飛和回收裝置,能垂直起降和自由懸停,對起飛場地和跑道沒有要求,作戰過程中可以隨時在陸地或艦船上起飛執行任務,能夠適應多種作戰環境。
3)無人直升機機身采用復合材料并進行了隱身結構設計,可以有效降低其雷達反射截面積,使得敵方雷達難以探測,可隱蔽縱深突防;同時無人直升機尺寸很小,發動機功率較低,其紅外熱信號也很低,可飛臨敵方雷達附近隱蔽處懸停實施近距離支援干擾,優勢明顯。
4)電子戰無人直升機抵近支援干擾雷達,由于遠離己方陣地,因此避免了對己方設備產生電磁影響;同時抵近干擾在很大程度上減少了干擾機天線和雷達天線之間的射頻路徑損耗,使得攜帶的干擾機不僅能從雷達主瓣實施干擾,而且能從雷達副瓣實施干擾,壓制雷達實施副瓣反干擾技術。
5)無人直升機續航時間長,可貼地飛行,長時間在指定區域巡航、懸停。另外,無人直升機作戰時還能按預編程序繞過固定的防空陣地,防空一方大部分雷達很難對其實施探測和跟蹤,從而使敵方雷達預警效率大大降低。
2 無人直升機雷達對抗模型分析
2.1 電子戰無人直升機干擾雷達數學模型
設電子戰無人直升機(后簡稱無人干擾機)、雷達和掩護目標的空間關系如圖1所示。雷達天線主瓣指向目標,而無人干擾機以天線主瓣指向雷達,干擾能量大部分將由雷達副瓣進入雷達。
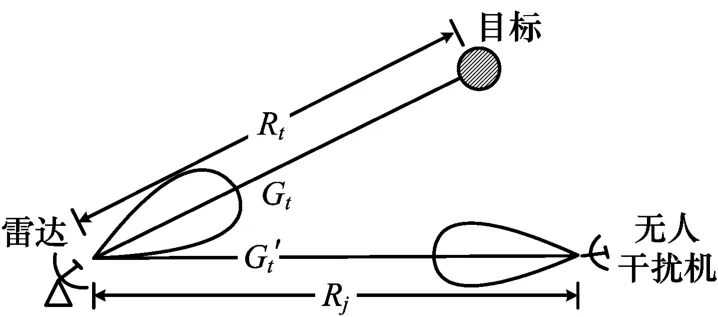
1 無人干擾機、雷達和目標的空間關系圖
此時,雷達將同時收到兩個信號:目標的回波信號和無人機的干擾信號。
雷達接收到的目標回波信號功率為:

式中,Pt為雷達發射功率,Gt為雷達天線增益,σ為目標的雷達截面積,λ為雷達工作波長,Rt為目標與雷達之間的距離。
進入雷達接收機輸入端外的干擾信號功率為:

式中,Pj為雷達發射功率,γj為干擾信號對雷達天線的極化損失,Rj為無人干擾機與雷達之間的距離,Gj(φ)為無人干擾機干擾天線在雷達方向上的增益。
無人干擾機的干擾功率和回波信號的功率比為:

又因為干擾-回波信號功率比大于或者等于干擾

從上述干擾數學模型可以看出,PjGj為有效干擾功率,PtGt為有效雷達功率,實施主瓣干擾時G′t較大,無人干擾機釋放的有效干擾功率要求小,實施副瓣干擾時G′t較小,無人干擾機所需釋放的有效干擾功率相對就較大,對于所有的電子戰干擾機來講,其干擾功率都有最大值,一旦滿足不了,就不能夠正常干擾敵方雷達、掩護己方目標。因此,當被干擾雷達與被掩護目標的參數給定時,要求的有效干擾功率就是干擾距離Rj的函數,它們之間存在確定的關系,下面進行仿真計算分析。
2.2 實例仿真分析
對于給定的雷達、無人干擾機和目標,技術參數和目標參數是一定的,假設敵方雷達的發射功率為Pt=100kW,雷達天線增益為Gt=30dB,σ=10m2,Gt(θ)為高斯方向圖,波束寬度為1.5°,Rt=10km,γj=0.5,Kj=10。對(4)式進行整理,可得到無人干擾機的有效干擾功率與干擾距離的關系為:

在此種條件下,運用Matlab仿真工具進行實例仿真計算,得出無人干擾機在不同的干擾距離上對敵方雷達實施干擾時,所需釋放的有效壓制干擾功率最小值,如表1所示。
壓制系數Kj,所以即可得出雷達對抗干擾模型為:

表1 無人機干擾距離與所需的有效壓制干擾功率關系變化表
無人干擾機抵近雷達的干擾距離與所需的有效壓制干擾功率關系仿真曲線如圖2所示。
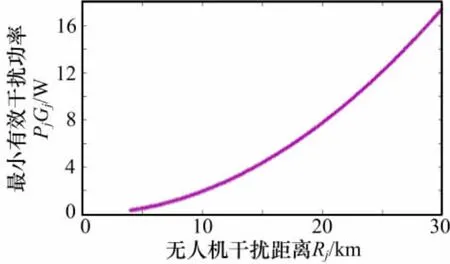
人干擾機干擾距離與所需有效壓制干擾功率關系圖
從圖2可以看出,電子戰無人直升機抵近雷達實施干擾,距離越近,越能以較小的干擾功率獲得有效的干擾效果,如果干擾距離減少至原距離的1/5,則干擾強度增大30倍,但是干擾距離也不是無限接近,下節會給出分析。同時干擾距離近,機載干擾機接收的雷達信號功率強,靈敏度要求就可以大大降低,由此就可以降低對機載干擾設備的要求,對于干擾設備的體積、質量、電源功率的改進設計等是非常有意義的。
2.3 最小配置距離分析
雖然電子戰無人直升機隨著與雷達距離的接近,干擾效果會越來越好,但是無人直升機也不是能夠無限接近雷達的。距離太近會容易暴露目標,而且干擾距離越近,無人干擾機接收雷達輻射的功率就越大,當雷達主波束照射時,由于接收信號功率過強、超過無人干擾機接收機負荷而容易導致接收系統過載燒毀,因此一定要避免此類情況發生,要把無人直升機干擾位置配置在與雷達距離合適的區域。
根據無人機抵近干擾雷達的特性,設定無人干擾機接收系統所能承受的最大信號功率為Pmax,則無人干擾機距雷達的最小干擾距離為:

式中,Ar是無人干擾機接收天線的有效接收面積。無人干擾機在距離雷達的最小干擾距離之外,才不必擔心接收系統會被燒毀。這里取有效接收面積為既定參數,其他參數同上述設定,仿真計算得出在此種情況下,無人干擾機與雷達距離的最小配置不得小于3.89km,以上分析不考慮大氣衰減、地面反射等因素的影響。因此,為達到較好的干擾效果,必須根據無人干擾機的相關約束條件和效能分析進行合理的配置。
3 無人直升機抵近干擾時壓制區的計算模型
根據雷達干擾方程,現在建立數學模型并分析雷達對抗戰術上最重要的干擾效能指標——壓制區。壓制區即無人直升機釋放干擾為使雷達不能發現目標的空間區域[3],通過壓制區的分析可以得出無人直升機額載干擾機的威力范圍。電子戰無人直升機飛臨目標雷達附近地域后,選擇適當的隱蔽處定點懸停釋放干擾,此時可以將無人直升機和雷達均看作是固定的點,而所掩護的戰機則是運動的點目標,其空間關系如圖3所示。

圖3 無人干擾機掩護戰機時的空間關系


4 無人機抵近支援干擾壓制區仿真分析
以雷達為坐標軸極點,雷達與無人干擾機之間的連線為極軸,建立極坐標系。根據上述討論,以θ為自變量,分別取燒穿距離R0為5km,K=0.06,H=6km,考慮到無人直升干擾機隨地形起伏超低空飛行,一般處于雷達盲區,可超近距離抵近敵方雷達但最小距離大于3.89km,因此Rj分別取值20km、12km、6km,代入設定的參數,通過Matlab仿真運行得出Dt所滿足的曲線圖像,如圖4~5所示。
由圖4可以看出,該閉合曲線是由無人干擾機和雷達連線為軸、兩邊對稱于此線的一個類心形曲線,壓制區即為該心形曲線之外的區域,而該心形曲線內的區域為暴露區,當被掩護的戰機飛至暴露區以內時,雷達將會發現戰機。
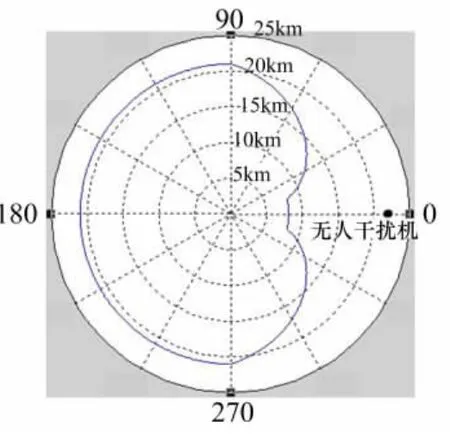
圖4 無人干擾機掩護戰機時壓制區仿真圖
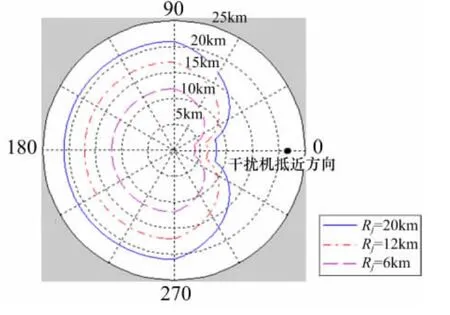
圖5 隨無人機干擾距離Rj抵 近壓制區的空間變化圖

目前,電子戰無人直升機是低空潛入敵方重點防御區內干擾敵防空雷達、指揮控制樞紐的最佳武器平臺。建議今后無人直升機可采用更輕質的雷達吸波和紅外隱身等復合材料,同時改進無人直升機雷達橫截面設計,提高其隱身突防能力,盡可能縮短無人干擾機抵近支援干擾距離,增強干擾效果;同時采取納米技術壓縮改進發動機,并加裝熱源處理器,可有效地降低無人直升機紅外熱信號的輻射,躲避敵方雷達偵察系統,甚至在被觀察哨發現時,仍可令敵方發射的便攜式紅外尋的導彈“無的可尋”。
5 結束語
電子戰無人直升機具有可利用地形地貌做掩護、定點懸停、超近距離飛臨敵方雷達實施支援干擾的優勢。本文通過建立無人直升機雷達對抗模型、無人直升機不斷抵近支援干擾的壓制區模型,運用Matlab軟件進行仿真分析,得出無人干擾機抵近支援干擾的干擾效果與干擾距離、干擾功率之間的關系。隨著干擾距離的抵近,干擾扇面增大,所需的有效干擾功率減小;功率不變時,掩護己方目標的壓制區就越大,暴露區越小,電子戰無人直升機的干擾效能得到明顯提高。同時,通過本文的分析,對無人直升機和機載干擾設備的合理改進提供了意見參考,希望能在一定程度上起到拋磚引玉的作用。
[1]費華蓮,陳越.電子戰無人機對抗相控陣雷達的技術淺析[J].電子偵察干擾,2007(3):1-4.
[2]周建軍,陳超,崔麥會.無人直升機的發展及其軍事應用[J].航空科學技術,2003(1):38-40.
[3]邵國培,曹志耀,何俊.電子對抗作戰效能分析[M].北京:解放軍出版社,1998.
[4]趙國慶,張正明,林像印.雷達對抗原理[M].西安:西安電子科技大學出版社,1999.
[5]侯印鳴,李德成,孔憲正,等.綜合電子戰[M].北京:國防工業出版社,2002.
[6]楊軍,趙鋒.無人機在雷達對抗中的應用研究[J].艦船論證參考,2008(1):59-64.