基于橫坐標系的捷聯慣導系統極區導航方法
2014-07-20 05:47:24奔粵陽
中國慣性技術學報 2014年3期
李 倩 ,孫 楓 奔粵陽 于 飛
(1.哈爾濱工程大學 自動化學院,哈爾濱 150001;2.哈爾濱工程大學 理學院,哈爾濱 150001)
基于橫坐標系的捷聯慣導系統極區導航方法
李 倩1,2,孫 楓1,奔粵陽1,于 飛2
(1.哈爾濱工程大學 自動化學院,哈爾濱 150001;2.哈爾濱工程大學 理學院,哈爾濱 150001)
現有慣性導航系統機械編排在極區(特別是地理極點附近)不適用。針對該問題,提出了適用于捷聯慣性導航系統極區使用的橫坐標系導航方法。構建出橫坐標系參考框架,推導出橫坐標系和常規坐標系之間位置、速度和姿態信息的轉換關系,建立了橫坐標系捷聯慣導系統的機械編排,并在此基礎上分析其誤差傳播特性。仿真分析表明:橫坐標系可以解決采用現有機械編排時,極區經線圈快速匯聚和地理極點附近無北向基準所引起的問題,從而滿足極區導航要求;同時,仿真結果驗證了橫坐標系捷聯慣導系統中位置和航向誤差漂移的特性。
捷聯慣性導航系統;極區;橫坐標系;誤差特性
基于極區工作環境特殊,以及水下潛器自主性和隱蔽性要求的考慮,慣性導航系統(Inertial Navigation System,INS)應作為極區水下潛器導航設備的核心[1-4]。目前,慣性導航系統普遍采用的機械編排是當地水平指北方位機械編排,即采用東-北-天(ENU)地理坐標系作為導航坐標系。對于平臺式慣性導航系統,這種機械編排下的導航系y軸要始終指向真北。當水下潛器通過地理極點附近時,真北很快變化180°,此時導航系y軸指向變化的速率將會無窮大[5-6]。對于捷聯式慣導系統,則在地理極點處存在計算溢出的問題。所以,這種機械編排不適用于在極區工作,而只能工作在南北緯度70° 以內。針對當地水平指北方位機械編排在高緯度地區存在的問題,游動方位慣導系統和自由方位慣導系統被提出[7-8]。它們可以解決慣性導航系統在極區遇到的部分問題,但由于極區經線圈的快速匯聚會使得系統導航精度隨緯度的升高而下降。同時在地理極點附近,由于真北方向失去定義導致自由方位角和游動方位角失去定義,航向無法給出,即采用這兩種機械編排的慣性導航系統在地理極點附近仍然無法導航。
為了解決上述機械編排在極區遇到的問題,國外首先提出了橫坐標系的概念[9-10],國內文獻也指出橫坐標系可以應對慣性導航系統高緯度工作的問題[11]。但他們沒有對橫坐標系下慣性導航系統的機械編排、誤差分析進行詳細的論述,同時,也未考慮到系統極區橫坐標系和常規系導航參數切換的問題。針對上述問題,對基于橫坐標系的捷聯慣性導航系統極區工作方法進行深入研究。
1 橫坐標系統定義
橫坐標系統包括橫地球坐標系和橫地理坐標系,同時在橫坐標系的參考框架下,橫極軸、橫赤道平面、橫本初子午面以及橫經緯度都需要重新定義。
在此基礎上,定義指向橫極軸的方向為新北向,則可以建立新的橫地理坐標系,即橫東-北-天坐標系,其定義如下:
——與軸呈右手定則關系;
——指向新北向;
——沿垂直方向指向天向;各坐標系示意圖如圖1所示。

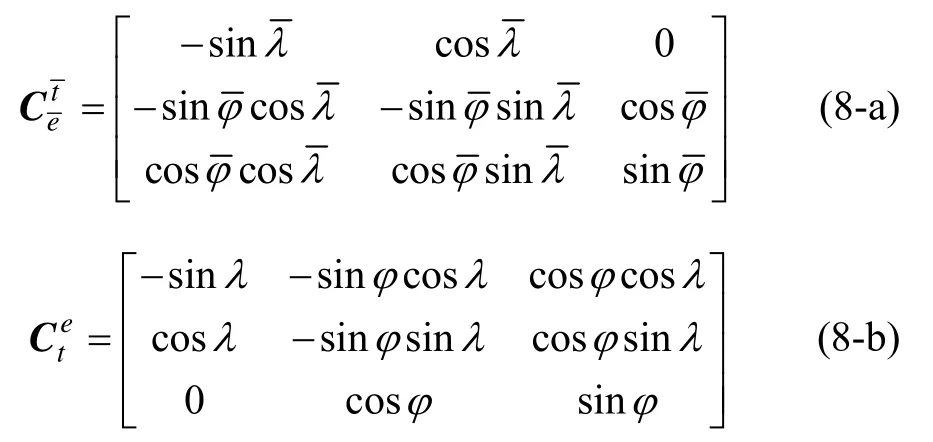
根據以上轉換關系,可以利用方向余弦矩陣推導得到橫地球坐標系和原地球坐標系之間的轉換關系為:
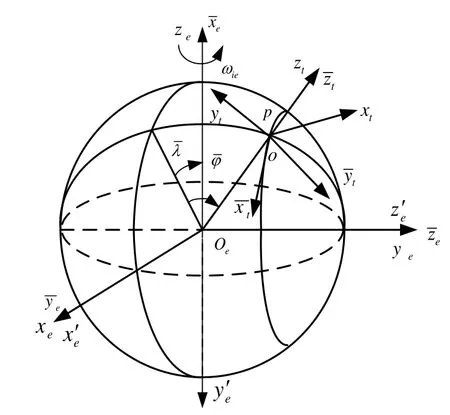
圖1 橫坐標系統定義Fig.1 Definition of transversal coordinate
2 導航參數在不同坐標系中的轉換關系
當水下潛器在低緯度地區航行時,一般仍然使用當地水平指北方位慣導系統機械編排(以下簡稱為常規坐標系統機械編排);當水下潛器由低緯度地區向極區航行時,需要將捷聯慣導機械編排切換至橫坐標系機械編排。為了保證系統在機械編排切換時不發生超調現象,使系統在兩種機械編排間平穩過渡,需要將兩種機械編排中的導航參數進行精確的轉化,包括位置信息、速度信息以及姿態信息。
2.1 位置信息轉換
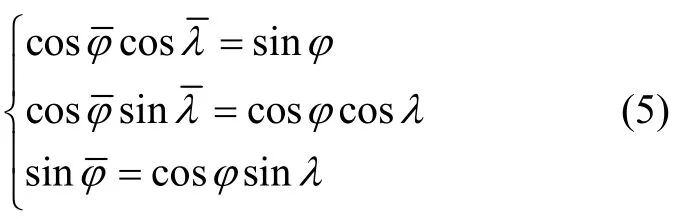
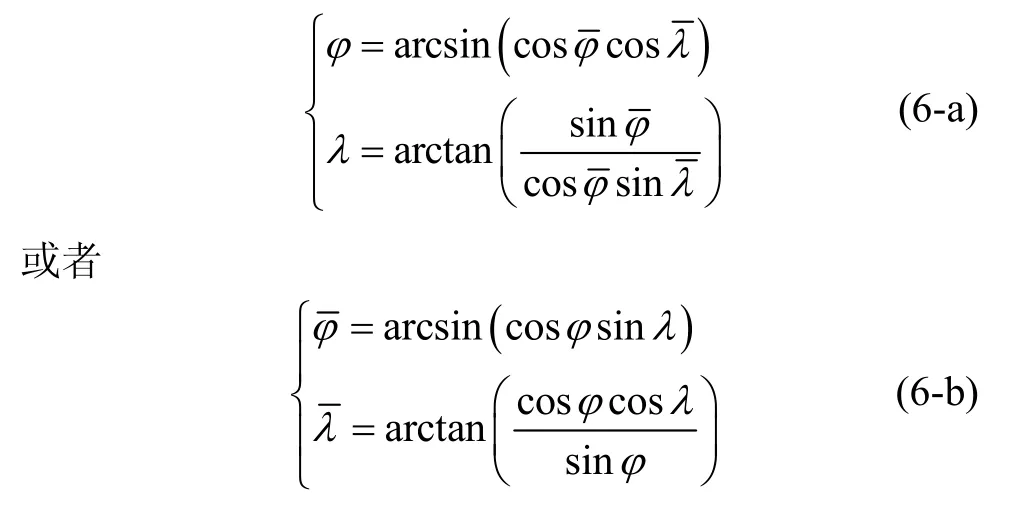
首先分析常規坐標系統中的經緯度坐標(λ,φ)與橫坐標系統中的橫經度、橫緯度之間的轉換關系。圖2為常規坐標系統中的經緯度定義與橫坐標系統中的經緯度定義示意圖。
如圖2所示,左圖是常規坐標系統中利用經緯度坐標(λ,φ)表示的載體位置P,載體與地心距離為連線,則在地球坐標系中三軸投影為:
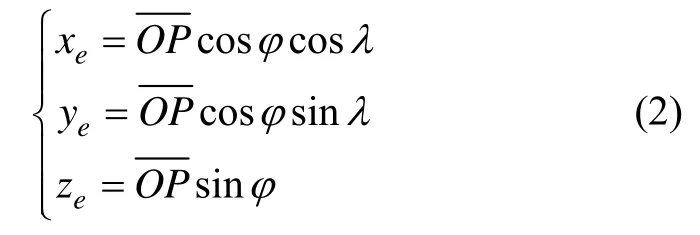
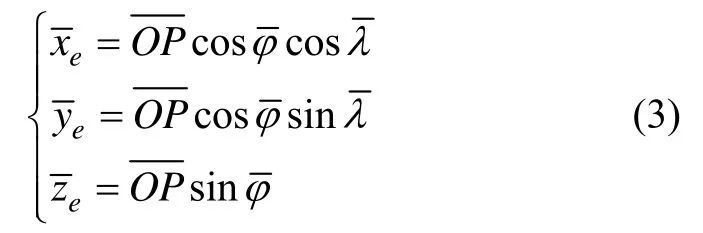
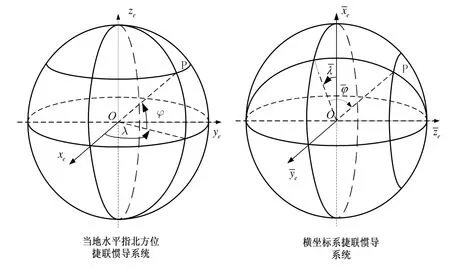
圖2 常規坐標系統和橫坐標系統中的經緯度坐標Fig.2 Longitude and latitude in normal and transversal coordinate system

將式(2)(3)帶入式(4)得到:
2.2 速度信息轉換
由于我們所需的速度信息是相對于地理系而言的,所以速度信息的轉換即意味著地理坐標系和橫地理坐標系之間的轉換。這兩個坐標系之間的轉換關系可以利用方向余弦矩陣表示,進一步分解方向余弦矩陣可以得到:


2.3 姿態信息轉換

另外一種更加直觀的姿態信息轉換方式是利用球面三角形相關理論確定兩個坐標系統中姿態信息的關系。由于軸和zt軸重合,所以兩個坐標系統中的水平姿態角相同,即

下面通過在地球表面上定義幾個球面角來描述橫坐標系統中的航向角和常規坐標系統中航向角ψ之間的關系,如圖3所示。
由圖3可知,由P、A、B三點構成的球面三角形中的三個內角分別為:


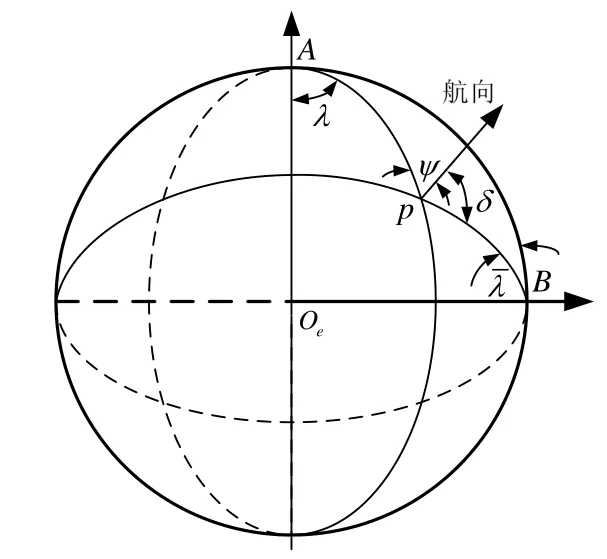
圖3 航向角在兩個坐標系統中的關系Fig.3 Relationship of heading angle between two coordinate systems
將式(13)中第1式代入式(14)得到:

由球面三角形正弦定理可知:
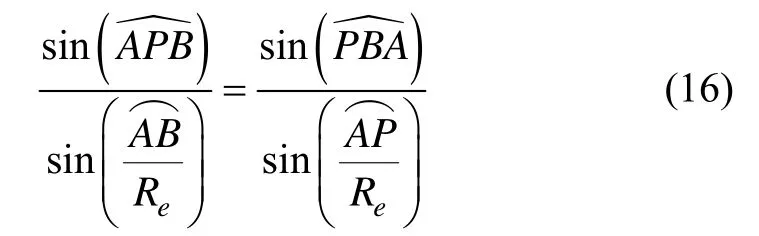
式中,Re為地球半徑。由式(16)可以得到:
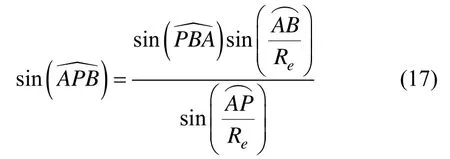

將式(18)代入(17)得到:

同理,利用球面三角形余弦定理可知:


由式(19) (21)可以得到:


3 橫坐標系捷聯慣導系統機械編排及誤差分析
在橫坐標系捷聯慣導系統中,系統機械編排基本不變。但是由于橫地球坐標系和橫地理坐標系相對常規坐標系統發生了改變,導致數學平臺旋轉角速度的計算發生了改變。
3.1 系統機械編排及誤差方程

式中,Ω為地球自轉角速率。將式(6)代入,得到:

另外,由于地球自轉角速度在橫赤道面上,得到:


綜上可得,地球轉動引起的橫地理坐標系角速度為:


根據式(28)(29)可以得到橫地理坐標系的角速度,即控制數學平臺的旋轉角速度為:

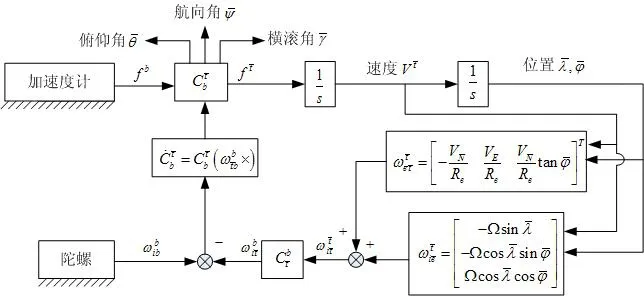
圖4 橫坐標系統機械編排Fig.4 Mechanization of transversal coordinate system
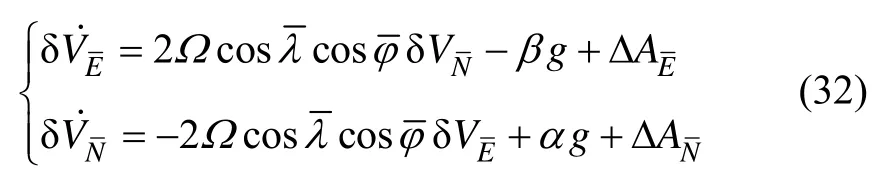
根據系統機械編排,可以得到靜基座橫坐標系捷聯慣導系統誤差方程如下所示:
a.失準角誤差方程

b.速度誤差方程
c.位置誤差方程
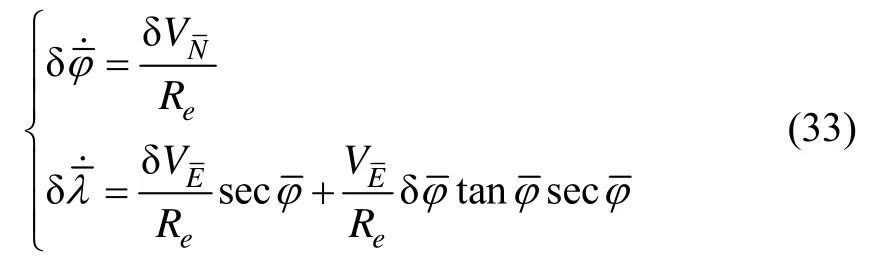
式中,α,β,γ為橫坐標系統中的失準角;為橫坐標系統中速度誤差;為橫經緯度誤差;分別是陀螺漂移和加速度計零偏在橫地理坐標系上的投影分量。
從式(31)~(33)可以看出,與常規坐標系統不同,橫坐標系統中的經度誤差不再是獨立的,而是耦合到其他誤差項中。
3.2 誤差分析
將式(31)~(33)進行拉式變換,并寫成矩陣形式,然后計算其行列式特征根為:

從系統特征根可以看出在橫坐標系統中,同樣存在舒勒、傅科以及地球三種周期性振蕩。
下面分析誤差源所引起的系統誤差。為簡化分析,這里只考慮陀螺常值漂移為唯一誤差源,以經緯度誤差為例。通過解矩陣方程,得到緯度誤差和陀螺漂移之間的關系為

式中,


式中,sω為舒勒角頻率。
將式(36)~(38)進行拉式反變換并將振蕩項去掉,只考慮穩態誤差得到:
同理,可以得到橫經度誤差在時域中的穩態值表達式為:
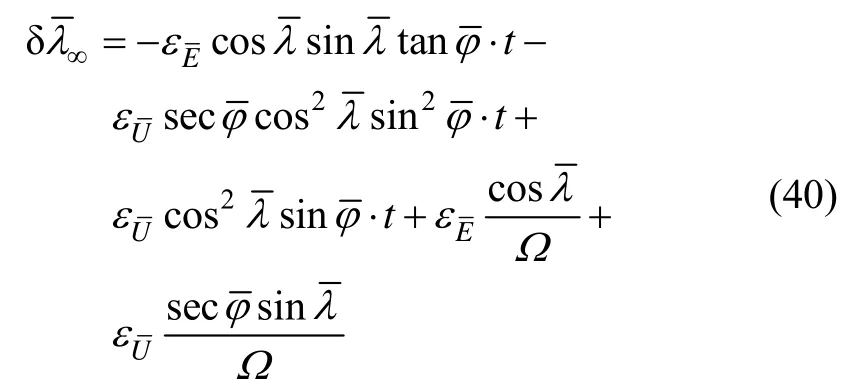
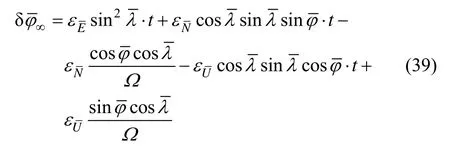
從式(39)(40)可以看出在橫坐標系統中,橫緯度誤差和橫經度誤差都是隨時間發散的,這與常規坐標系統中只有經度誤差發散是不同的。同理,利用此方法分析陀螺漂移對橫坐標系統中失準角的影響,發現方位失準角也是隨時間發散的,這與常規坐標系統也不一樣。
4 系統誤差的分析比較
第3.2節分析了橫坐標系統中的橫經緯度誤差的傳播特性,下面通過將橫經緯度誤差轉換到常規坐標系統中,比較兩個坐標系統中導航參數的誤差傳播特性。由式(6)可知,地理緯度φ和橫緯度φ、橫經度λ存在下列關系:

由誤差傳遞公式可知,地理緯度誤差和橫經緯度誤差之間存在關系:
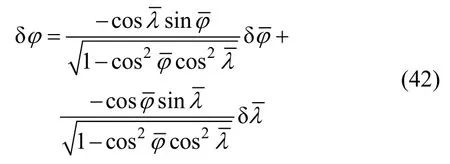
將式(39) (40)代入式(42)中,得到:
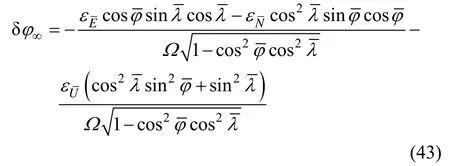
由式(43)可見,當將橫坐標系統中的橫緯度轉換到常規坐標系統中后,轉換后的緯度誤差中的隨時間累積項被抵消掉,導致其只存在常值性誤差。為進一步比較,同時為簡便分析,令

式中,ψ為常規坐標系統中的航向角,δψ為兩坐標系統中航向角差值,由式(23)確定。則載體系陀螺漂移和橫地理系陀螺漂移投影存在下面關系:

將式(46)代入式(43),得到:
同理,可以得到轉換后的經度穩態誤差和載體系陀螺漂移之間存在關系:
由式(49)可見,在將橫經度轉換到常規坐標系統中后,其誤差中仍然包括常值性誤差項和隨時間累積誤差項。
對比常規當地水平指北方位捷聯慣導系統,其中的經緯度穩態誤差和載體系陀螺漂移存在下面關系:
比較式(47)(49)和(51)(52)可以發現,在將橫坐標系統中的橫經緯度轉換到常規坐標系統后,其誤差與常規坐標系統中的經緯度誤差具有相同的傳播形式。特別是z軸陀螺對兩種坐標系統影響是一致的,而x,y軸陀螺漂移對經緯度誤差的影響和對橫經緯度誤差的影響之間只相差一個比例系數Ki(i=1,2,3),其大小只與位置有關。如果,則x,y軸陀螺漂移對轉換后的經緯度誤差影響較大;如果,則x、y軸陀螺漂移對常規當地水平固定指北方位系統中的經緯度誤差影響較大;如果,則x,y軸陀螺漂移對兩者影響相同。
為進一步比較陀螺漂移對兩者影響的關系,建立極區附近的一塊矩形區域網格,其大小為20×179點,分辨率是1o。網格區域范圍是:
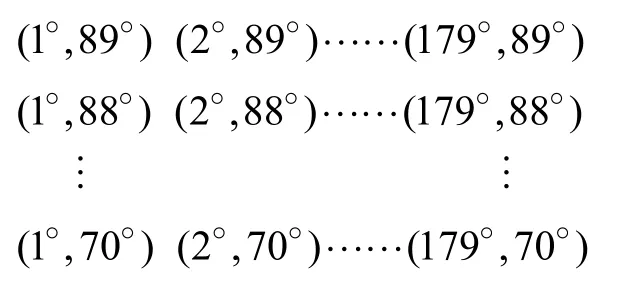
注意,為了保證Ki(i=1,2,3)計算的有效性,沒有包括緯度90°和經度180°。在此位置范圍內,計算Ki(i=1,2,3)的大小,如圖5~7所示。
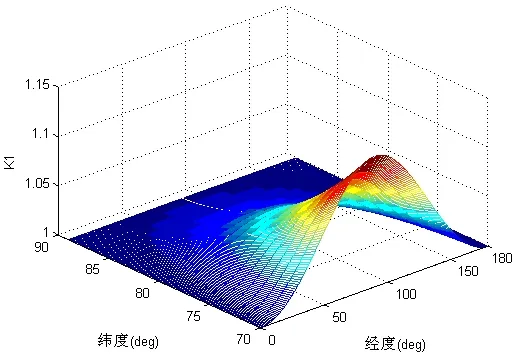
圖5 K1取值范圍Fig.5 Value of K1
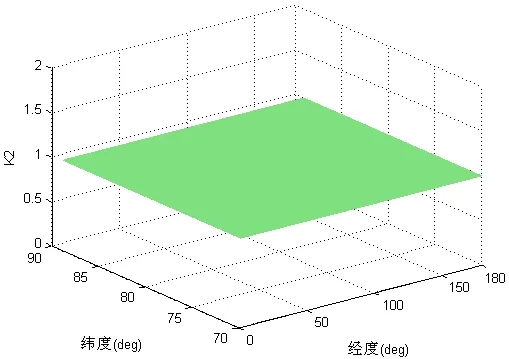
圖6 K2取值范圍Fig.6 Value of K2
圖7 K3取值范圍Fig.7 Value of K3
從圖5~7可以看出,越接近于極區,Ki(i=1,2,3)越接近于1,即當都以當地水平坐標系為參考基準時,兩種坐標系統中的位置誤差具有相同的傳播特性。
5 仿真試驗
為驗證基于橫坐標系的捷聯慣導系統極區工作性能,進行仿真試驗。其中,為避免數值求解在極區遇到的問題,在生成仿真軌跡時陀螺和加速度計的輸出通過解析法給出。
仿真參數設置如下:初始位置φ=87°,λ=120°,載體勻速航行,速度VE=0 m/s,VN=25 m/s,航向角ψ= 0°,水平姿態角為0°,即沿著當地經線圈航行(注:此處所設置參數均相對于常規坐標系統)。捷聯慣導系統工作在橫坐標系機械編排,載體航行大約3.7 h后穿越極點,仿真時間4 h。誤差源只考慮陀螺常值漂移,設,仿真結果如圖8~10所示。由圖8~10可知,在極區使用橫坐標系機械編排,可以有效的解決極區經線圈快速匯聚所引起的問題,滿足極區導航要求。另外,在過極點時,橫坐標系捷聯慣導系統仍然可以正常工作,無跳變現象發生。同時,也可以驗證前面分析的結論,即橫經緯度誤差和航向角誤差是發散的。這也說明,為了保持水下潛器長航時高精度的導航要求,有必要進一步利用重調或組合技術抑制位置誤差和航向角誤差發散。
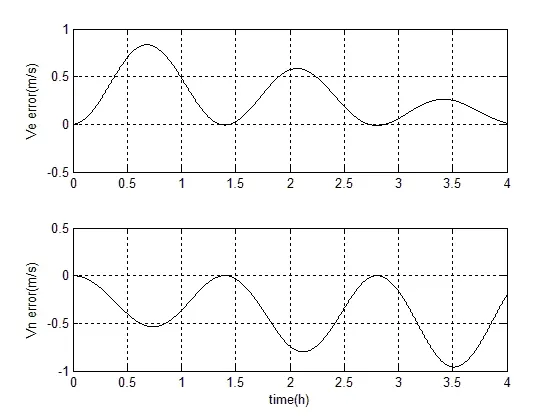
圖8 橫坐標系速度誤差Fig.8 Velocity error of transversal coordinate system
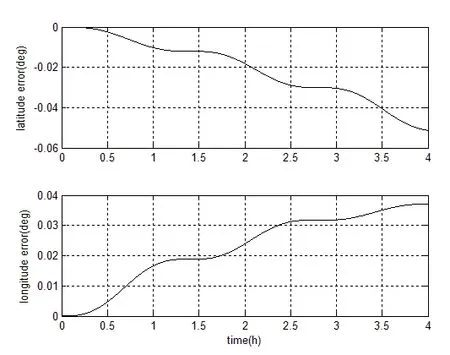
圖9 橫坐標系位置誤差Fig.9 Position error of transversal coordinate system
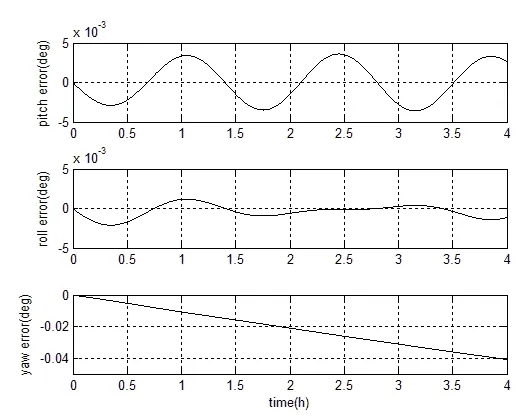
圖10 橫坐標系姿態角誤差Fig.10 Attitude error of transversal coordinate system
6 結 論
橫坐標系捷聯慣導系統將極點設置于赤道平面,從而解決了常規機械編排在極區進行導航時遇到的問題(特別是極點附近無北向基準)。本文給出了導航參數在橫坐標系和常規系之間的轉換關系;在建立橫坐標系捷聯慣導系統機械編排的基礎上,對其進行了誤差分析,結果表明在橫坐標系捷聯慣導系統中經緯度誤差和方位失準角都是發散的。為了進一步比較陀螺漂移對兩種機械編排的影響,以經緯度誤差為例,將橫經緯度誤差轉換到常規坐標系中,分析結果顯示它們具有相同的誤差傳播形式。
仿真和分析結果表明:為保證水下潛器在極區可以長航時高精度導航,需要利用重調或組合技術抑制其誤差發散,因此,研究橫坐標系的組合與重調是下一步工作的重點。
(References):
[1]Encyclopedia of Earth sciences series-polar ocean navigation[M].New York:Springer Science Business Media,2014.
[2]Andriani S,Lysandros T.Choosing a suitable projection for navigation in the arctic[J].Marine Geodesy,2013,36(2):234-259.
[3]Wang Xianwei,Cheng Xiao,Hui Fengming,et al.Navigation in fast ice near the Zhongshan Station,Antarctica[J].Marine Technology Society Journal,2013,48(1):84-91.
[4]Andreev A G,Ermakov V V,Mafter M B.High latitude trials of modern russian marine compasses[C]// Position Location and Navigation Symposium.2006:636-644.
[5]吳楓,秦永元,周琪.機載武器極區傳遞對準算法[J].中國慣性技術學報,2013,21(2):141-146.WU Feng,QIN Yong-yuan,ZHOU Qi.Airborne weapon transfer alignment algorithm in polar regions[J].Journal of Chinese Inertial Technology,2013,21(2):141-146.
[6]周琪,秦永元,嚴恭敏,等.大飛機極區慣性/天文組合導航算法研究[J].系統工程與電子技術,2013,35(12):2559-2565.ZHOU Qi,QIN Yong-yuan,YAN Gong-min.Stellarinertial navigation for transpolar large aircraft[J].Systems Engineering and Electronics,2013,35(12):2559-2565.
[7]周琪,岳亞洲,張曉冬,等.極區飛行間接格網慣性導航算法[J].中國慣性技術學報,2012,22(1),18-22,66.ZHOU Qi,YUE Ya-zhou,ZHANG Xiao-dong,et al.Indirect grid inertial navigation mechanization for transpolar aircraft[J].Journal of Chinese Inertial Technology,2014,22(1):18-22,26.
[8]劉文超,譚志楊,卞鴻巍,等.游動方位 INS/GPS組合導航在極地地區的應用[J].火力與指揮控制,2013,38(2):69-75.LIU Wen-chao,Tan Zhi-yang,BIAN Hong-wei.Application of wander azimuth INS/GPS integrated navigation in polar region[J].Fire Control&Command Control,2013,38(2):69-75.
[9]Broxmeyer C.Inertial navigation system[M].New York:McGraw-Hill,1964.
[10]Levinson E,Ter Horst J,Willcocks M.The next generation marine inertial navigation is here now[C]// IEEE Position Location and Navigation Symposium.1994:121-127.
[11]周琪,秦永元,付強文,等.極區飛行格網慣性導航算法原理[J].西北工業大學學報,2013,31(2): 210-217.ZHOU Qi,QIN Yong-yuan,FU Qiang-wen.Grid mechanization in inertial navigation system for transpolar aircraft[J].Journal of Northwestern Polytechnical University,2013,31(2):210-217.
Polar navigation of strapdown inertial navigation system based on transversal frame in polar region
LI Qian1,2,SUN Feng1,BEN Yue-yang1,YU Fei2
(1.College of Automation,Harbin Engineering University,Harbin 150001,China;2.College of Science,Harbin Engineering University,Harbin 150001,China)
The present mechanizations of inertial navigation system are not suitable for use in polar region,especially at near the geography polar.To solve this problem,a navigation method based on transversal frame is proposed for strapdown inertial navigation system in polar region.The navigation reference framework of the transversal frame is constructed.The parameter transformations from a transversal frame system to a normal system for position,velocity and attitude are deduced.Moreover,the mechanization based on transversal frame for strapdown inertial navigation system is established,and its error propagation characteristics are analyzed.The simulation and analysis results show that this method could solve the problem that longitude circles converges fast in polar region and the north benchmark is invalid,so it can satisfy the requirements of polar navigation.Meanwhile,the simulation results also demonstrate that the yaw and position errors drift with time in the transversal frame of strapdown inertial navigation system.
strapdown inertial navigation system;polar region;transversal frame;error characteristics
U666.1
A
1005-6734(2014)02-0288-08
10.13695/j.cnki.12-1222/o3.2014.03.003
2013-11-20;
2014-03-28
高等學校博士學科點專項科研基金(20102304110021);中央高校基本科研業務費專項基金(HEUCF041420)
李倩(1983—),女,博士研究生,從事慣性導航研究。E-mail:liqianheu@163.com
聯 系 人:孫楓(1964—),男,教授,博士生導師,從事慣性導航研究。E-mail:benpao2002heu407@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45