基于比例多重積分觀測器的三軸慣性穩定平臺加速度計測角誤差估計
2014-07-20 05:47:32鐘麥英矯成斌李樹勝
中國慣性技術學報 2014年3期
鐘麥英,矯成斌,李樹勝,趙 巖
(北京航空航天大學 慣性技術與導航儀器系,北京 100191)
基于比例多重積分觀測器的三軸慣性穩定平臺加速度計測角誤差估計
鐘麥英,矯成斌,李樹勝,趙 巖
(北京航空航天大學 慣性技術與導航儀器系,北京 100191)
航空遙感三軸慣性穩定平臺用于有效隔離飛行載體的偏航及姿態角運動,使成像載荷沿航向平穩飛行并保持載荷視軸對地垂直指向。通常情況下,穩定平臺采用高精度位置姿態測量系統(Position and Orientation System,POS)作為姿態角傳感器,一旦POS發生故障會導致平臺失穩甚至危及載荷安全。為了提高平臺運行可靠性并保證載荷安全,考慮了一種以加速度計作為姿態角冗余傳感器的雙工作模式,即POS組合工作模式和自主工作模式。當POS發生故障時平臺切換到自主工作模式,依靠平臺自身加速度計組件進行姿態控制。但與POS相比,加速度計測角易受載體擾動加速度影響從而導致測角誤差較大,嚴重影響平臺的穩定精度。針對這一問題,提出了一種基于比例多重積分(Proportional and Multiple-integral,PMI)觀測器的加速度計測角誤差估計方法,對平臺系統建模及PMI觀測器的設計過程進行了詳細的論述,并利用真實飛行實驗數據進行了性能測試。結果表明該方法對實際誤差的估計精度達到0.0701°(RMS),可較好的估計出加速度計測角誤差,為提高平臺自主工作模式的穩定精度奠定基礎。
三軸慣性穩定平臺;加速度計;自主工作模式;比例多重積分觀測器
高分辨率對地觀測系統的高精度實時運動成像要求飛行載體做勻速直線運動,但在實際飛行過程中,由于受到陣風、湍流等外部擾動以及發動機振動等內部擾動的影響,飛行載體的非理想運動不可避免地使成像載荷視軸不穩定,從而導致成像質量下降[1-2]。三軸慣性穩定平臺用于有效隔離飛行載體的偏航及姿態角運動,使成像載荷沿航向平穩飛行并保持載荷視軸對地垂直指向,以滿足高精度實時運動成像要求[3-4]。
通常情況下,由安裝在成像載荷上的位置姿態測量系統(Position and Orientation System,POS)作為平臺姿態角測量傳感器,為平臺三框架閉環控制提供姿態信息[3]。一旦POS發生故障會導致平臺失穩甚至危及載荷安全,為了提高平臺運行可靠性及保證載荷安全,本文考慮了一種以加速度計作為姿態角冗余傳感器的雙工作模式,即POS組合工作模式和自主工作模式。當POS發生故障時切換到自主工作模式,依靠平臺自身加速度計組件進行姿態控制[5]。但與POS組合工作模式相比,自主工作模式下的加速度計測角易受飛行載體運動加速度影響從而導致測角誤差較大[6],若直接進行反饋易使平臺穩定精度下降。因此有必要采取措施對自主工作模式下的加速度計測角誤差進行估計,進而進行有效補償,以提高三軸慣性穩定平臺自主工作模式下的穩定精度。
目前針對加速度計隨機誤差和測量噪聲進行處理的研究較多[7-9],而對于穩定平臺加速度計測角誤差的研究則十分有限。文獻[6]利用互補卡爾曼濾波器充分融合平臺速率陀螺和加速度計信息,一定程度上減小了加速度計測角誤差,但該文獻并沒有針對擾動加速度進行建模,因此并不能從本質上解決加速度計測角誤差問題。文獻[10]提出一種比例多重積分(Proportional and Multiple-integral,PMI)觀測器設計方法,并將其應用于實際車輛橫向系統的故障估計。PMI觀測器能夠在未知輸入擾動作用下同時估計出系統狀態和傳感器誤差[10-12],有助于解決平臺自主工作模式下加速度計測角誤差估計問題。本文首先對存在加速度計測角誤差的系統進行建模,在此基礎上提出了一種基于PMI觀測器的加速度計測角誤差估計方法,實時估計出加速度計測角誤差,為三軸慣性穩定平臺自主工作模式提供較為精確的位置反饋信息,為提高平臺自主工作模式的控制精度奠定基礎。
1 系統建模與問題描述
1.1 系統建模
三軸慣性穩定平臺的結構如圖1所示,由三個框架構成,由外至內分別是橫滾框、俯仰框和方位框。位置姿態系統(Position and Orientation System,POS)安裝在對地觀測載荷上,用于測量載荷相位中心相對于當地導航坐標系的姿態角,同時可作為平臺姿態角測量傳感器;Mx、My、Mz為三臺力矩電機,分別用來驅動橫滾框、俯仰框和方位框的轉動;Gx、Gy、Gz為安裝在框架上的速率陀螺,其中Gx敏感橫滾框相對于慣性空間的轉動角速度,Gy敏感俯仰框相對于慣性空間的轉動角速度,Gz敏感方位框相對于慣性空間的轉動角速度;Ax、Ay為安裝在俯仰框上的加速度計,其中Ax的敏感軸與橫滾框的旋轉軸重合,Ay的敏感軸與俯仰框的旋轉軸重合,用于測量平臺框架的水平傾角。
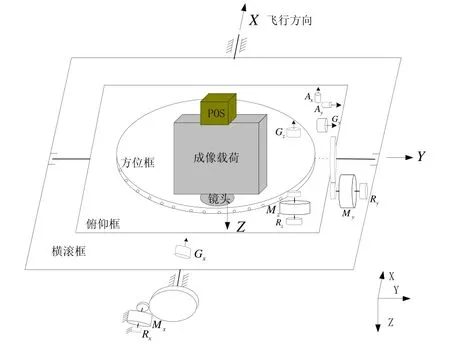
圖1 航空遙感三軸慣性穩定平臺結構示意圖Fig.1 Layout of three-axis ISP for airborne remote sensing
以平臺俯仰框為例,其工作原理如圖2所示,正常航拍過程中平臺處于POS組合工作模式,此時POS作為姿態角測量傳感器,控制器根據給定姿態和POS測量出的姿態信息產生控制信號驅動框架轉動以達到穩定和跟蹤當地地理水平的目的。但當POS發生故障時,平臺切換到自主工作模式,此時由加速度計輸出的比力信息解算得到框架姿態角,并用于平臺位置閉環。本文主要研究平臺自主工作模式下的加速度計測角誤差估計問題。
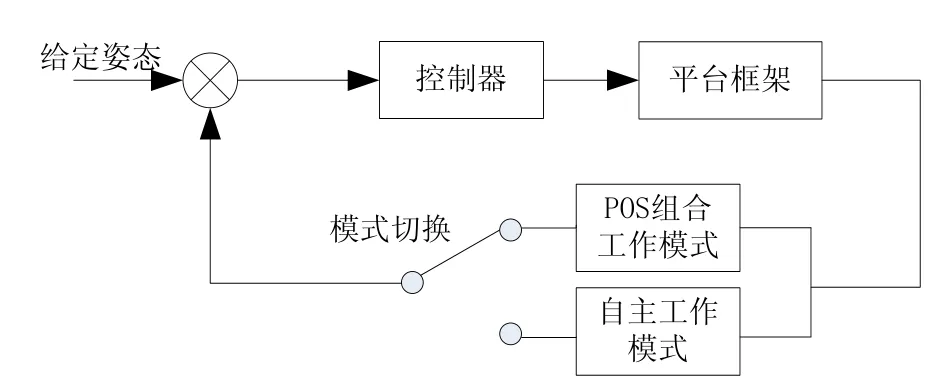
圖2 平臺工作原理圖Fig.2 Scheme of the platform working principle
航空遙感用高精度三軸慣性穩定平臺需要承載質量較大的成像載荷,結構上采用電機和一級齒輪減速相結合的間接驅動方式[5]。建立該部分的傳遞函數模型,需要進行電機端和平臺端的 力矩、角速度及轉動慣量的相關轉換,轉換公式如下:
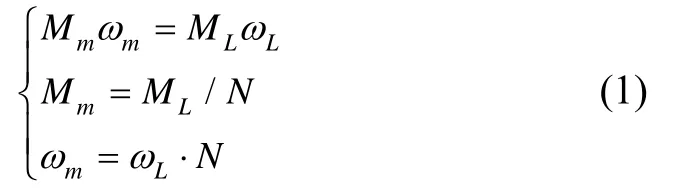

其中,Mm和ωm分別為電機輸出轉矩和旋轉角速度,ML和ωL分別為平臺轉矩和角速度,N為傳動比,JmL為轉換到平臺端的電機轉子轉動慣量。
由直流力矩電機原理、力矩方程以及公式(1)、(2)我們可以得到平臺的系統模型為[5]:
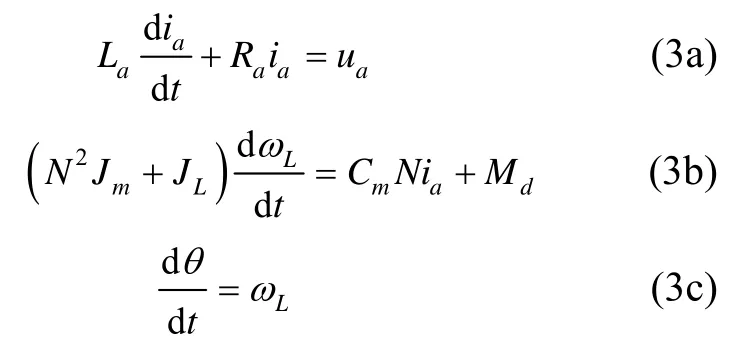
其中,La為電機電樞電感,Ra為電樞繞組,ia為電機電樞電流,Ce為電機反電動式系數,ωL為框架角速度,ua為電機控制電壓,Jm為電機轉子轉動慣量,JL為負載轉動慣量,Cm為電機的力矩系數,Md為系統總的干擾力矩,θ為框架角。
1.2 問題描述
由加速度計的工作原理知:加速度計測量的是比力信息,當物體靜止或勻速運動時,根據其上加速度計輸出信號與重力矢量之間的關系可計算出水平姿態角,其測角原理如圖3所示。
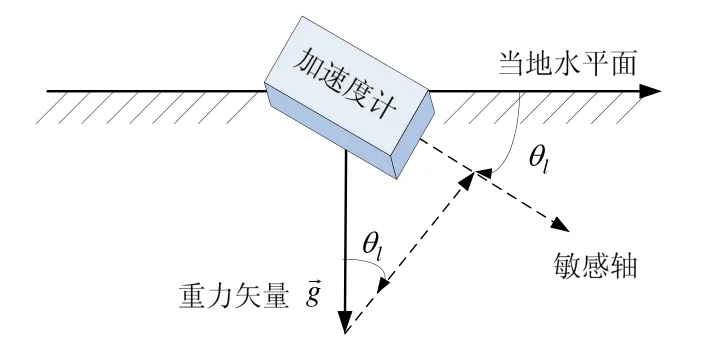
圖3 加速度計測角原理Fig.3 Angle measure by accelerometer
由此可以計算出框架與當地水平面之間夾角,即水平姿態角θl的大小:

其中,θl為水平姿態角,f為加速度計輸出的比力,g為當地的重力加速度。由于平臺框架運動范圍較小(小于5°),因此可以對公式(4)進行小角度線性化,即:

但是飛行載體在實際飛行過程中不可避免的會存在時變擾動加速度,導致加速度計測角誤差較大。由于時變擾動加速度的垂直分量較小,本文主要考慮時變擾動加速度的水平分量(以水平加速度分量a→為例),此時加速度計測得的比力信息為如下形式:

此時,按照公式(5)進行計算可得加速度計測得的水平傾角為:

由公式(7)可知由于未知水平加速度分量a→的存在,加速度計測得的水平傾角存在較大的誤差,不能準確反映出平臺真實的姿態信息,如果直接將解算出來的lθ′進行閉環反饋則平臺處于自主工作模式時會出現無規則的晃動,影響平臺自主工作模式的穩定精度,因此必須采取有效措施獲取相對準確的平臺框架姿態角。本文首先建立存在加速度計測角誤差的系統模型;然后設計PMI觀測器實時估計出加速度計測角誤差,為三軸慣性穩定平臺自主工作模式提供較為精確的姿態反饋信息。
2 基于PMI觀測器的加速度計測角誤差估計
2.1 存在加速度計測角誤差的系統模型
質量不平衡力矩主要包括靜基座不平衡力矩和動基座不平衡力矩兩大類。動基座不平衡力矩指在航攝時,由重力加速度和作用在三軸慣性穩定平臺上的擾動加速度共同產生的擾動力矩。
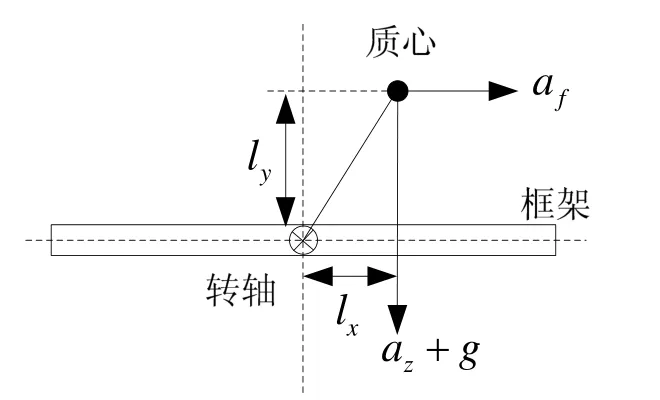
圖4 動基座不平衡力矩示意圖Fig.4 Sketch map of dynamic imbalance torque
三軸慣性穩定平臺動態質量不平衡力矩作用示意圖如圖4所示,其數學表達式為[13]:

其中,Tmass為三軸慣性穩定平臺的動態不平衡力矩,m為框架與載荷的總質量,lx和ly分別代表相對于框架水平方向和垂直方向的不平衡力臂,az為垂直方向上的擾動加速度分量,af為水平方向上的擾動加速度分量。
由公式(8)可知動態不平衡力矩主要有兩部分組成,本文將垂直方向上的加速度分量引起的不平衡力矩可作為總的干擾力矩的一部分;而將水平方向上的加速度分量引起的干擾力矩視為加速度計測角誤差引起的干擾力矩。因此公式(3b)應改寫為:

此時自主工作模式的三環控制結構圖如圖5所示。
選取三軸慣性穩定平臺的框架角速度ωL和框架角θ為狀態變量,框架角速度ωL和框架角θ為輸出變量,視水平方向的擾動加速度af與重力加速度g的比值為加速度計測角誤差fs,根據穩定平臺的系統模型
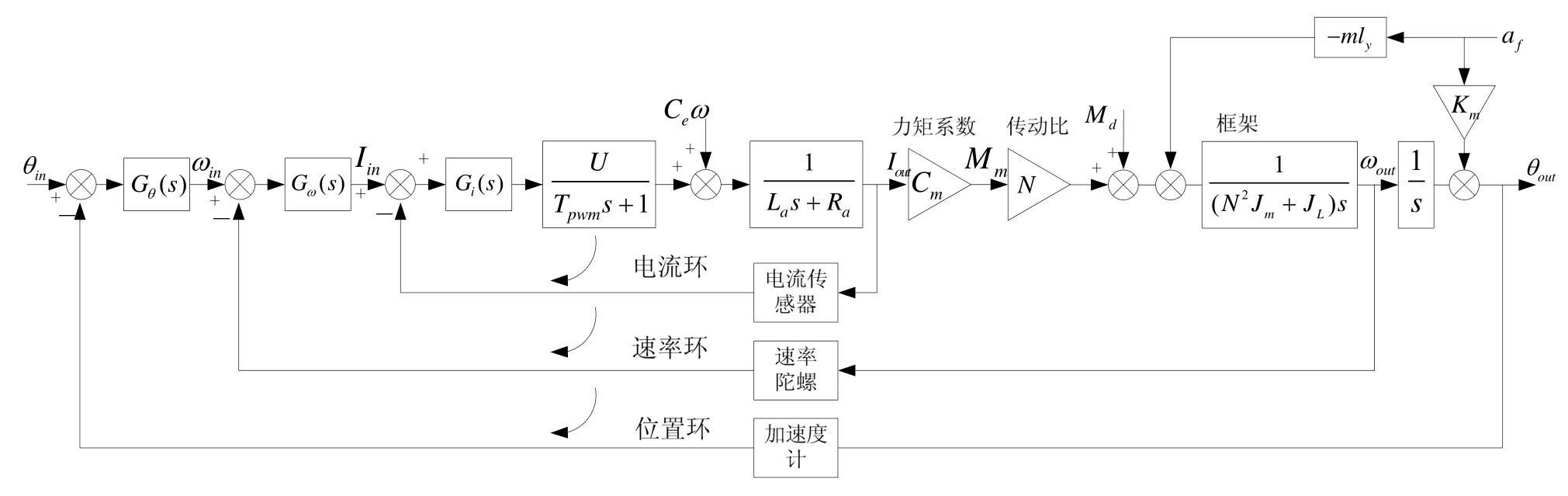
圖5 控制系統結構圖Fig.5 Configuration of the control system
建立如下狀態空間描述:
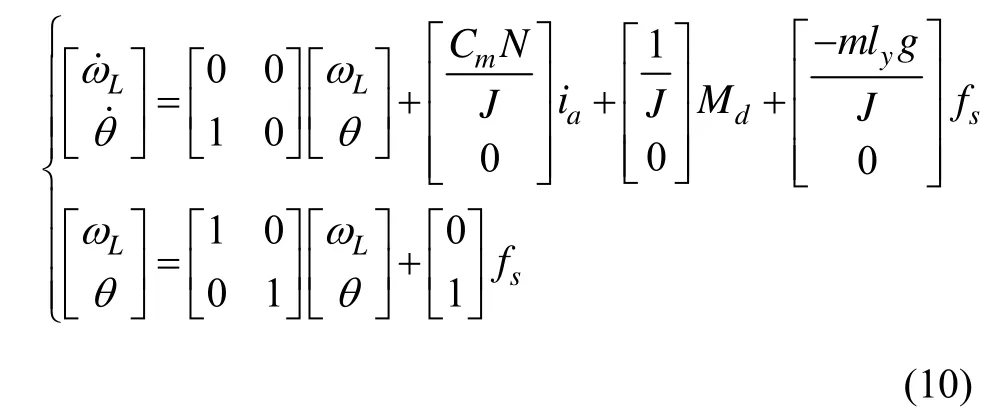

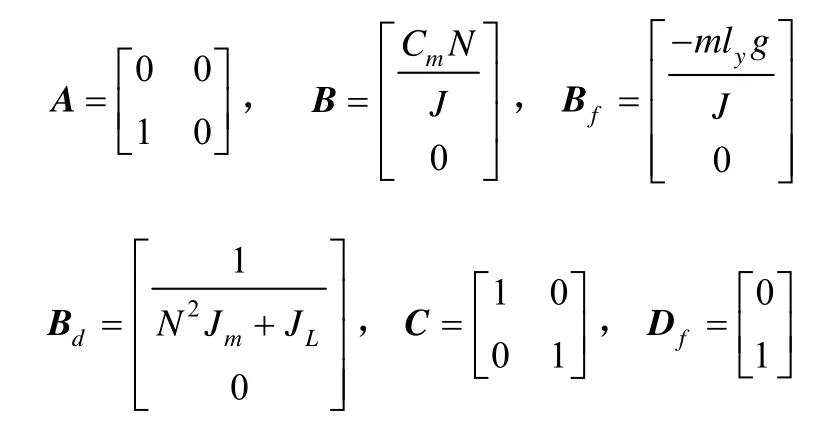
其中,系數矩陣定義如下:
2.2 PMI觀測器設計
不失一般性,可將三軸慣性穩定平臺加速度計測角誤差fs近似描述成由如下多項式函數形式[14]:


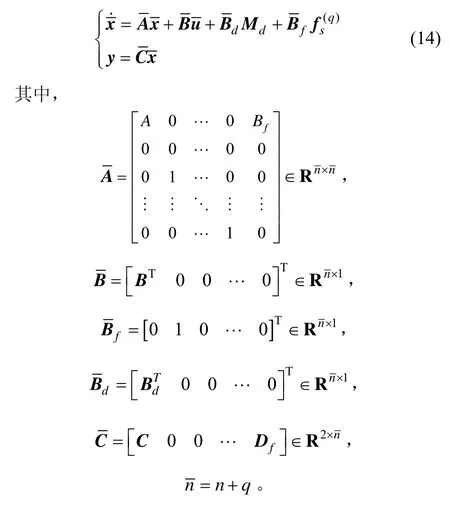
系統的參數矩陣滿足如下條件:

因此針對形如(14)的狀態空間表達式存在如下狀態觀測器:

選取一個μ值滿足如下不等式:

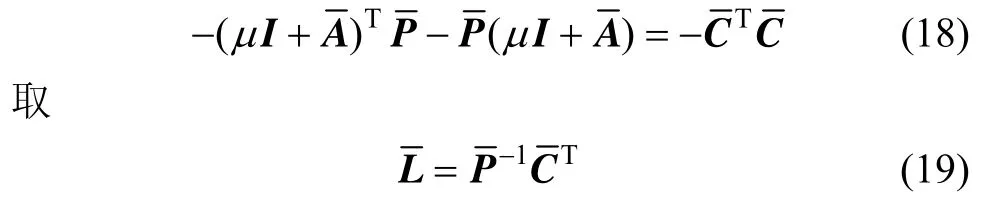
于是公式(18)等價于:

綜上,通過選擇合適的μ值,由公式(18)、(19)即可求得觀測器增益矩陣,將觀測器的極點配置在小于-μ的區域。同時,文獻[10]給出穩態時的狀態估計誤差的上界值:

3 實驗驗證
3.1 參數計算
通過實驗室內靜基座基礎上的實驗結果,確定系統模型中的ly,靜基座上的干擾力矩主要是質量不平衡力矩,其表達式如下:

其中,lθ為框架角,為靜基座下的質量不平衡力矩總和。
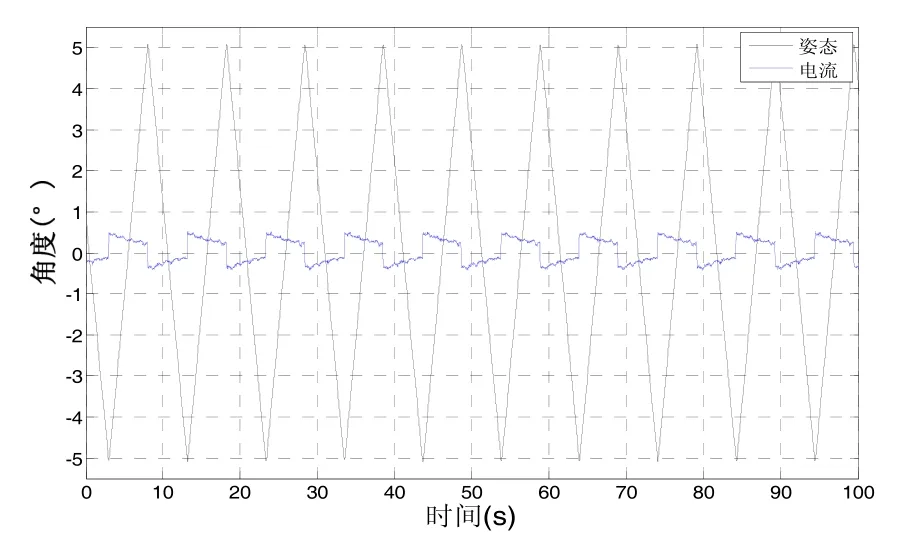
圖6 俯仰框姿態與電機電樞電流對比圖Fig.6 Pitch frame posture and motor current comparison chart
靜基座下,令平臺俯仰框以±2 (°)/s的角速率在±5°范圍內進行搖擺伺服運動,得到電流和姿態對比如圖6所示。此時電機輸出力矩,完全用于克服干擾力矩(主要是不平衡力矩和摩擦力矩,其中摩擦力矩值可視為常數C)。可以得到如下表達式:

系統參數理論值如表1所示,結合公式(25)和圖5通過數據擬合求得參數ly≈0.0232 m,在這里選取q=2和μ=8進行PMI觀測器設計,求得觀測器增益矩陣為:

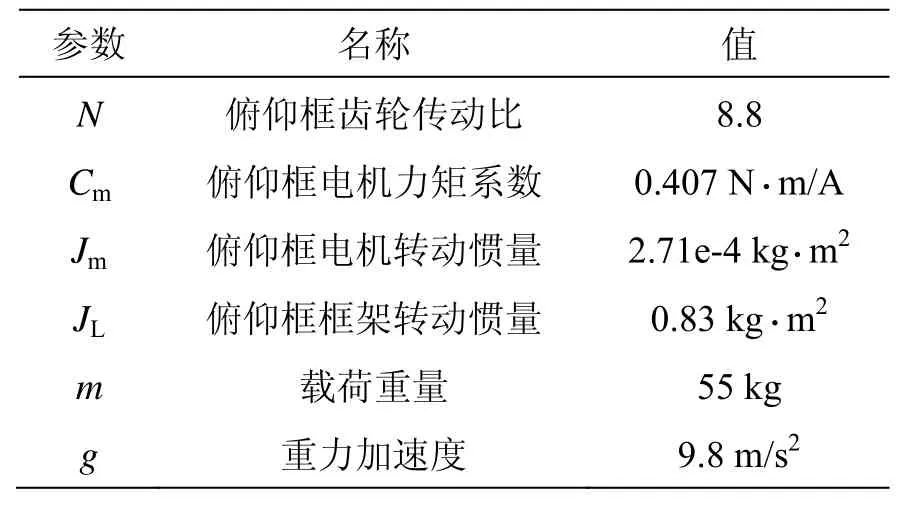
表1 系統參數理論值Tab.1 System parameters of the theoretical value
3.2 實驗驗證
現以作者所在實驗室研制的高精度大負載三軸慣性穩定平臺為實驗對象,采用真實飛行實驗數據來驗證所設計的PMI觀測器的有效性。實驗設備如圖7、圖8所示,包括飛行載體、三軸慣性穩定平臺、成像載荷、高精度 POS、PC上位機、電源等,實驗過程中三軸慣性穩定平臺工作在 POS組合工作模式,由PC上位機采集平臺各傳感器信息,離線代入到所設計的PMI觀測器中進行計算驗證。
實驗中采用的高精度 POS的水平姿態實時精度為0.005°(1σ),此處將POS輸出的姿態信息視為真值。實驗數據處理結果如圖9所示,其中真實誤差表示了加速度計輸出信息和POS輸出信息的差值。

圖7 飛行載體Fig.7 Flight vehicle

圖8 實驗設備Fig.8 Experiment equipment
計算結果顯示:采用本文所設計的方法,對實際誤差的估計精度達到0.0701°(RMS)。表明:當存在外界時變加速度擾動時,所設計的PMI觀測器能夠較好的估計出水平加速度計測角誤差,為平臺自主工作模式下干擾量的估計提供了一種有效的方法。
由于狀態空間表達式中所用數據均為平臺設計過程的理論值,與實驗采用的真實平臺存在差異。同時,本文只對時變加速度水平擾動分量對加速度計測角誤差的影響進行了討論,因垂直擾動分量較小,故予以忽略。這都是影響估計效果存在誤差的原因。這部分內容將在后續研究中深入進行。
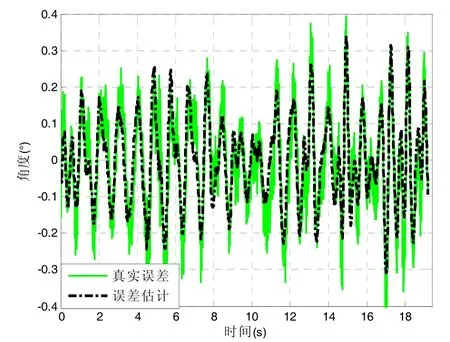
圖9 實驗數據處理結果Fig.9 Results of experiment data processing
4 結 論
針對三軸慣性穩定平臺自主工作模式下加速度計測角受載體擾動加速度影響較大這一問題,在介紹了常規系統建模、加速度計測角原理、動態不平衡力矩作用機理的基礎上,建立了存在加速度計測角誤差的系統模型,進而設計了PMI觀測器用于實時估計加速度計的測角誤差。并利用真實飛行實驗數據進行了性能測試,結果表明所設計的PMI觀測器能夠較好的估計出加速度計測角誤差,對實際誤差的估計精度達到0.0701°(RMS),驗證了方法的有效性,為進一步對平臺進行高精度的控制奠定基礎。
(References):
[1]周向陽,趙強.航空遙感三軸慣性穩定平臺雙速度環控制[J].中國慣性技術學報,2013,21(4):439-445.ZHOU Xiang-yang,ZHAO Qiang.Dual rate-loop control method of three-axis inertially stabilized platform for aerial remote sensing application[J].Journal of Chinese Inertial Technology,2013,21(4):439-445.
[2]Jiang F,Ding H S,Fu T.Orientation density and workspace analysis of a parallel stabilized platform testing system[J].Journal of Beijing Institute of Technology,2012,21(3):302-308.
[3]房建成,戚自輝,鐘麥英.航空遙感慣性穩定平臺不平衡力矩前饋補償方法[J].中國慣性技術學報,2010,18(1):38-43.FANG Jian-cheng,QI Zi-hui,ZHONG Mai-ying.Feedforward compensation method for three axes inertially stabilized platform imbalance torque[J].Journal of Chinese Inertial Technology,2010,18(1):38-43.
[4]Li S S,Zhong M Y.The internal model control design of three-axis inertially stabilized platform for airborne remote sensing[C]//IEEE Instrumentation and Control Technology.London,2012 :5-10.
[5]Mu Q Q,Liu G.,Zhong M Y.Imbalance torque compensation for three-axis inertially stabilized platform using acceleration feedforward[C].IEEE Instrumentation and Control Technology.London,2012:157-160.
[6]杜超超.三軸慣性穩定平臺穩定精度分析與控制[D].北京:北京航空航天大學碩士學位論文,2012.DU Chao-chao.Three-axis inertial stabilized platform stabilization precision analysis and control[D].Beijing University of Aeronautics and Astronautics:A dissertation submitted for the degree of master,2012.
[7]Kazuaki I,Riccardo A,Roberto O.Use of MEMS accelerometers for performance improvement of motion control systems with low resolution position sensors[C]//ISIE.Taiwan,May,2013:1-6.
[8]殷廣冬,王建立,孟浩然,等.基于加速度計的望遠鏡平臺抖動測量與分析[J].傳感器與微系統,2013,32(11):125-131.YIN Guang-dong,WANG Jian-li,MENG Hao-ran,et.al.Telescope platform jitter measurement and analysis based on accelerometer[J].Transducer and Microsystem Technologies,2013,32(11):125-131.
[9]Yuta Teruyama,Takashi Watanabe.A basic study on variable-gain Kalman filter based on angle error calculated from acceleration signals for lower limb angle measurement with inertial sensors[C]//35thAnnual International Conference of the IEEE EMBS.Osaca,Japan,July,2013:3423-3426.
[10]Z Gao,Steven X D,Y Ma.Robust fault estimation approach and its application in vehicle lateral dynamic systems[J].Optimal Control Applications and Methods,2007:143-156.
[11]Wu A G,Feng G,Duan G R.Proportional multiple-integral observer design for discrete-time descriptor linear systems J].International Journal of Systems Science,2012,43(8):1492-1503.
[12]Tang Y M,Patton R J.Active FTC for non-linear aircraft based on feedback linearization and robust estimation[C]//The 8th IFAC Symposium on Fault Detection,Supervision and Safety of Technical Processes.August 29-31,2012,Mexico City,Mexico.
[13]白長瑞.三軸慣性穩定平臺擾動抑制與補償技術研究[D].北京:北京航空航天大學碩士學位論文,2012.BAI Chang-rui.Research on the disturbance rejection and compensation technology for triaxial inertial stabilized platform[D].Beijing University of Aeronautics and Astronautics:A dissertation submitted for the degree of master,2012.
[14]Youssef Y,Chadli M,Karimi H R.Chaos synchronization based on unknown input proportional multipleintegral fuzzy observer[J].Abstract and Applied Analysis,2013,151(3):279-288.
Error estimation of angle measured by accelerometer based on PMI observer for three-axis inertially stabilized platform
ZHONG Mai-ying,JIAO Cheng-bin,LI Shu-sheng,ZHAO Yan
(Department of Inertia Technology and Navigation Guidance Instrument,Beihang University,Beijing 100191,China)
Three-axis inertially stabilized platform for airborne remote sensing is used to isolate the impact of flight vehicle attitude angular motion to improve the image quality and operational efficiency.Normally,the stabilized platform uses a POS as attitude angle sensor.Once the POS has failure,it will lead to instability and even endanger the load platform security.In order to improve the operational reliability of the platform and the safety of the load,a kind of dual modes is proposed,that is,the POS combination mode and the independent mode.The platform switch to independent mode when the POS has failure,and the platform uses the accelerometer for attitude control.But compared with POS,an accelerometer has a larger angle measuring error which affects the stability precision of the platform seriously.In order to solve this problem,this paper proposes a method of accelerometer measuring error estimation based on PMI observer.Then a system modeling and the design process of the PMI observer is discussed.The performance tests are carried out by using real flight experiment data.The experimental results show that this method can effectively estimate the accelerometer angle measuring error to the accuracy of 0.0701°(RMS),which provides the basis for improving the accuracy of the platform.
three-axis inertially stabilized platform;accelerometer;independent work mode;PMI observer
鐘麥英(1965—),女,教授,博士生導師。E-mail:myzhong@buaa.edu.cn
U666.1
A
1005-6734(2014)03-0311-06
10.13695/j.cnki.12-1222/o3.2014.03.007
2014-01-09;
2014-04-21
國家自然科學基金(60825305,61104198)