Improved approach to target tracking of non-cooperative unmanned aircraft vehicle
2014-07-20 05:47:38ZHULihuaCHENGXianghongCAOZhenxinYuanFuhGwo
中國慣性技術學報 2014年3期
ZHU Li-hua,CHENG Xiang-hongCAO Zhen-xin,Yuan Fuh-Gwo
(1.Key Laboratory of Micro Inertial Instrument and Advanced Navigation,Southeast University,Nanjing,210096,China;2.State Key Lab of Millimeter Waves,Southeast University,Nanjing,210096,China;3.Department of Mechanical and Aerospace Engineering,North Carolina State University,Raleigh,NC 27695,USA)
Improved approach to target tracking of non-cooperative unmanned aircraft vehicle
ZHU Li-hua1,2,CHENG Xiang-hong1,CAO Zhen-xin2,Yuan Fuh-Gwo3
(1.Key Laboratory of Micro Inertial Instrument and Advanced Navigation,Southeast University,Nanjing,210096,China;2.State Key Lab of Millimeter Waves,Southeast University,Nanjing,210096,China;3.Department of Mechanical and Aerospace Engineering,North Carolina State University,Raleigh,NC 27695,USA)
An improved algorithm utilizing quadrature Kalman filter(QKF) is proposed to locate a movable obstacle in real time for a “see and avoid” (S&A) system with multi-sensor detection in a non-cooperative unmanned aircraft vehicle(UAV) with enhanced accuracy and effectiveness.The S&A system primarily include two subsystems:SINS/GPS navigation unit and detection unit encompassing radar and EO sensors.The QKF algorithm fusing heterogeneous sensing data is exemplified by testing two dynamic nonlinear motion models of the obstacle,i.e.the turning model and the Singer model.In comparison with the results obtained from unscented Kalman filter(UKF),the QKF demonstrats that the obstacle can be detected and tracked more rapidly and accurately.
unmanned aircraft vehicle;see and avoid system;non-cooperative;non-linear dynamics;quadrature Kalman filter
The primary step of the S&A is the obstacle detection,a range of possible sensor options to permit small UAVs detecting capability have been investigated.As UAVs can be classified into the cooperative and non-cooperative categories,cooperative UAVs commonly use Automatic Dependent Surveillance–Broadcast(ADSB) to accomplish the S&A ability,but if there is none mutual electronic means of identification on-board,the non-cooperative system is an inevitable way to conduct S&A for the UAV system.
Researchers around the world have been proposing non-cooperative S&A systems in recent years.Kephart and Braasch[1]dedicated to the transition between current technology and future fully autonomous S&A systems on UAV.Zsedrovits[2]analyzed the daylight situations of detecting intruder aircrafts in clear or cloudy sky with cameras by an image processing algorithm.Eulisset al.[3]estimated minimum bounds of detection ranges of a simple avoidance maneuver between two aircrafts with Laser range finders for S&A on a small UAV.Lai et al.[4],proposed a vision-based collision-detection system to detect targets at distances ranging from 400 to around 900 m and provided an advance warning about 8-10 s prior to collision.Fasanoet al.[5-7]built an obstacle detection system aiming at UAV non-cooperative collision avoidance,in which,radar,Electro-optical (EO)sensors and infrared sensors are employed to perform multi-sensor data fusion with the Extended Kalman filter.
In this paper,the hardware architecture of the S&A system for a UAV is presented,including navigation unit and detection unit.The detection unit consists of two cameras and radar.The two cameras are placed on opposite sides of the wings for binocular stereo vision and vision expansion,and an X-band pulse radar,playing a very important role as a sensor for its capability of detecting the existence of the obstacle at long distance,providing accurate position,velocity and elevation of the obstacle,is set on the nose of the aircraft to perform the multi-sensor detection.However,there always exists environmental disturbances (such as airstream,temperature and clutter),which result in the noise in sensors’ outputs and consequent decrease of the detecting accuracy has to be considered in the research.Targeting at this problem,this paper mainly focuses on the approach—Quadrature Kalman Filter (QKF) to estimate the dynamic information of the obstacle.Two typical nonlinear air-traffic scenarios—UAV come across a turning obstacle and UAV comes across a dynamic accelerating obstacle with Singer[8]model are tested in this paper,and the testing results are compared with the results of UKF algorithm,revealing the fact of better accuracy and rapid convergence of QKF.All the calculation has been done in a Cartesian coordinate—East-North-Up (ENU).
1 Hardware architecture
The hardware architecture used in this paper mainly encompasses two units:the navigation unit and the detection unit.The navigation unit is used to secure and track the information of the UAV body movement,for instance position,velocity,attitudes (heading direction,pitching and rolling angles).From the navigation unit,the obstacle traces identified by the parameters can be resolved correctly,not only because the detection unit provides the relative position and velocity of the obstacle,more importantly the UAV attitudes would have great influence on the detected data.The detection unit is composed of an X-band pulsed radar and two cameras in visible band.The radar is installed on the nose of the aircraft,and the two cameras are mounted on each wing parallel to the aircraft’s crosswise axis,shown in Fig.1.The necessity and the resolution of the sensor selection are discussed below.
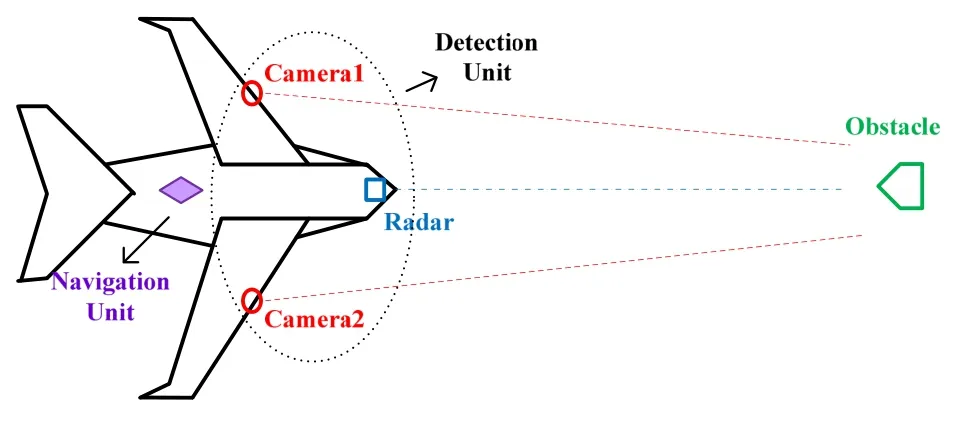
Fig.1 Sensor units placement on a UAV
1.1 Navigation Unit
The GPS/SINS(Strap-down Inertial Navigation System) integral navigation unit is applied in this research to provide the UAV itself the accurate position,velocity and attitudes information.In this paper,the precision of the SINS is:the gyro constant drift rate is 0.01°/h;and the accelerometer bias is 0.01×10-3g;The stochastic noise of the SINS gyroscopes and accelerometers is Gaussian white noise with the level of N(0,(0.005°/h)2) and N(0,(0.05×10-3g)2) respectively.The data rate of SINS is 2.5 ms.GPS data rate is 1s.
1.2 Detection Unit
RADAR (short for RAdio Detection and Ranging)is an obstacle detection system which uses radio waves to determine the range,altitude,direction,or speed of objects for all times in all weather conditions.However,the standalone radar is incapable of achieving a good S&A for UAV for several inherent disadvantages;for example,the low data rate could not provide any information by receiving the echo wave from the near field obstacle to discriminate the time difference.Thus,adding other sensors in cooperation could complement the deficiency of the radar sensor.As visual techniques are becoming more and more employed in all kinds of field,cameras/Electro-Optical (EO) sensors are undoubtedly a good viable option owing to its remarkable advantages such as light payload and higher angular accuracy.However,cameras also have their deficiencies,for they have higher false alarm rate,easily affected by illumination and so on.Thus,using cameras and radar are complementary each other for the UAV S&A research.As the placement of the sensors is shown in Fig.1,the properties of sensors are shown in Table 1.
2 Tracking Obstacle Algorithm
As the movement of the obstacle is random and there always exists stochastic disturbance,the system usually works in nonlinear dynamic environment.A number of algorithms have been proposed to recursively estimate the obstacle state in such conditions.For examples,the Extended Kalman Filter (EKF) was firstly chosen as the tracking algorithm due to the compromise between accuracy and computational requirements.The EKF first linearizes the nonlinear process and the measurement dynamics is also interpolated with a first-order Taylor series about the current state estimate.An Unscented Kalman Filter (UKF) proposed by Julier in 1995[9],uses a series of sigma points to capture the mean and covariance of a Gaussian density,which can reach the accuracy of the second order Taylor series expansion.Finally the Particle Filter (PF),performs sequential Monte Carlo estimation based on a set of random samples with associated weights to acquire the posterior probability density function.
However,innovative filtering techniques can offer the potential of increased accuracy,and the advantages brought by these techniques in the sense and avoid (S&A)framework.A quadrature Kalman filter (QKF) was recently introduced by Ito and Xiong[10]as another suboptimal,nonlinear filter.It uses the Gauss-Hermite numerical integration rule to calculate the recursive Bayesian estimation integrals under the Gaussian assumption,which does not require a large number of sampled particles and more applicable for the real-time problems compared with PF because of its heavy computation load.And on account of its better performance by using formulas for mean and variance calculation,the QKF shows higher accuracy and faster convergence than with UKF,let alone EKF.For other field applications,Wu and Han[11]examined the effecttiveness of the square root quadrature Kalman filter(SRQKF),which had been exploited to track the ballistic re-entry target.Besides,the QKF has also been employed in assessing accuracy of the airborne passive location for the advantage of its robustness and higher convergence rate by Xueet al.[12].Minget al.have investigated QKF in estimation of different fields,such as the orbit estimation[13],online estimation of the battery state of charge[14]and vision-based relative navigation of two spacecraft[15].Based on all the virtues and practical applications mentioned above,here a new quadrature Kalman filter proposed by Arasaratnamet al.[16]is proposed,which is extended to a more general setting,to accomplish the obstacle detection.
The strategy of the QKF is presented as follows.Considering the nonlinear system model is given by Eq.(1) and (2),which are respectively known as the state equation and the measurement equation:
where,xkandzkrepresent the system state estimate vector and the measurement vector at timek,vk,wkandukare system noise,measurement noise and the system input respectively.
The whole QKF process constitutes the time update and measurement update steps,in which,ξlandωldenote the Gauss-Hermite quadrature point and the associated weight;Q,Randzksymbolize the system process noise covariance matrix,measurement noise covariance matrix and the measurement vector at timek.
The whole QKF process constitutes the time update and measurement update steps[16],shown as follows.
2.1 Time Update Step
Assume at timekthat the posterior density functionis known.Factorize

Evaluate the quadrature points

Evaluate the propagated quadrature points:

Estimate the predicted state:

Estimate the predicted error covariance

At the end of the time update,we have the predicted density.
2.2 Measurement Update Step Factorize:

Evaluate the quadrature pointsas

Evaluate the propagated quadrature pointsas

Evaluate the predicted measurement:

Estimate the innovation covariance matrix

Estimate the cross covariance matrix:

Estimate the Kalman gain:

Estimate the update state:

Estimate the corresponding error covariance:

At the end of the measurement update,we have the posterior density.
3 Numerical Verification
To illustrate multi-sensor detection facing intruders which perform maneuvers,the flowing two intruder dynamic scenarios have been chosen.Here,a twodimensional case follows in a straightforward manner has been considered.
3.1 Scenario 1
Considering the typical air-traffic scenario--turning maneuver:the obstacle executes maneuvering turn in a horizontal plane at a constant (in blue),but unknown turn rate.And the UAV moves towards the obstacle with constant speed 50 m/s (in red).Fig.2 shows a representtative trajectory of the obstacle.
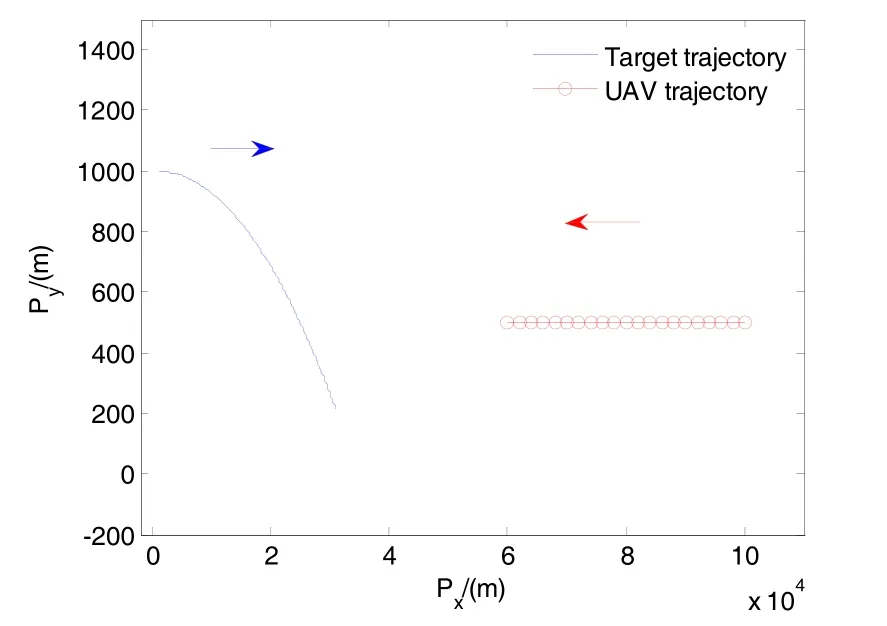
Fig.2 Geometry of scenario 1
The kinematics of the discrete-time turning motion model is as below.
wherexk=[Px(k),Vx(k),Py(k),Vy(k),ω]T.Px(k) andPy(k)represent position in East and North direction,respectively.Vx(k) andVy(k) are corresponding velocities,ωis the turning rate,Tis the sample time,wk~N(0,Q) denotes zero-mean Gaussian distribution of the system noise,Qthe covariance matrix of the system noise.
When the track is measured by the radar:the rangerkand bearingθk,can be expressed by:
Wherevk ~N(0,R),Ris the covariance matrix of the measurement noise.
The position error,velocity error and turning rate error are shown in Fig.3 ~ Fig.5 and Tab.1.The red lines represent the estimation error with QKF,the blue dotted

Fig.3 Position errors of QKF and UKF in scenario 1
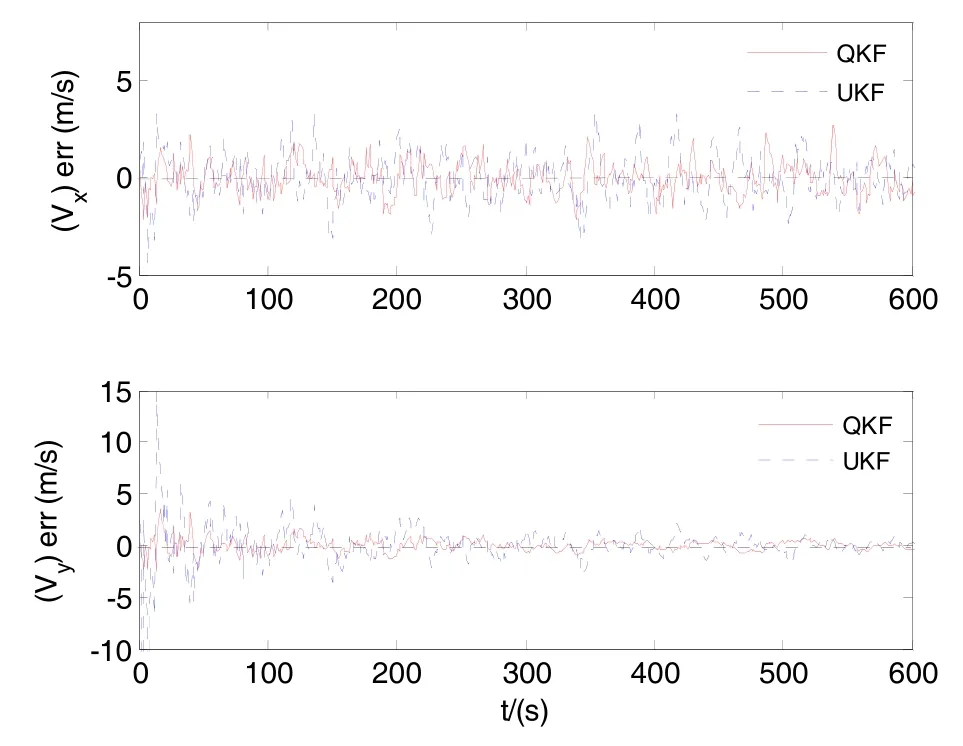
Fig.4 Velocity errors of QKF and UKF in scenario 1
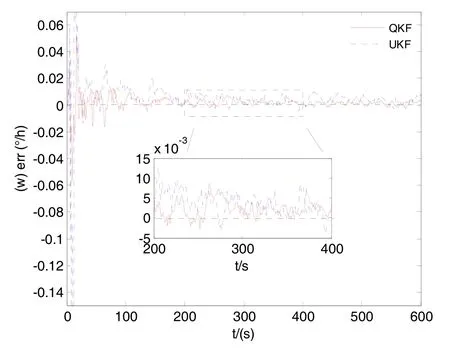
Fig.5 Turning rate errors of QKF and UKF in scenario 1
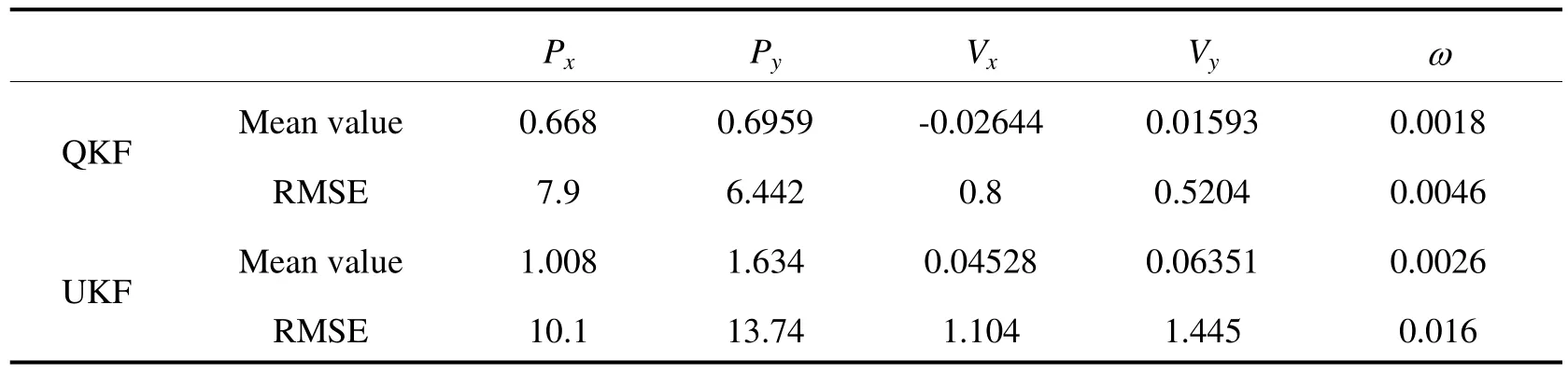
Tab.1 Statistical parameters in scenario 1
lines are the estimation error with UKF.
Fig.3~Fig.5 show that the errors associated position,velocity and turning rate of QKF and UKF for 10 mins,respectively.In which,it can be clearly observed that the QKF has higher accuracy,and Fig.5 shows quicker convergence of QKF.Besides,the comparison of mean values and root-mean square errors (RMSEs) from Table 2 also illustrate the better performance of the QKF.
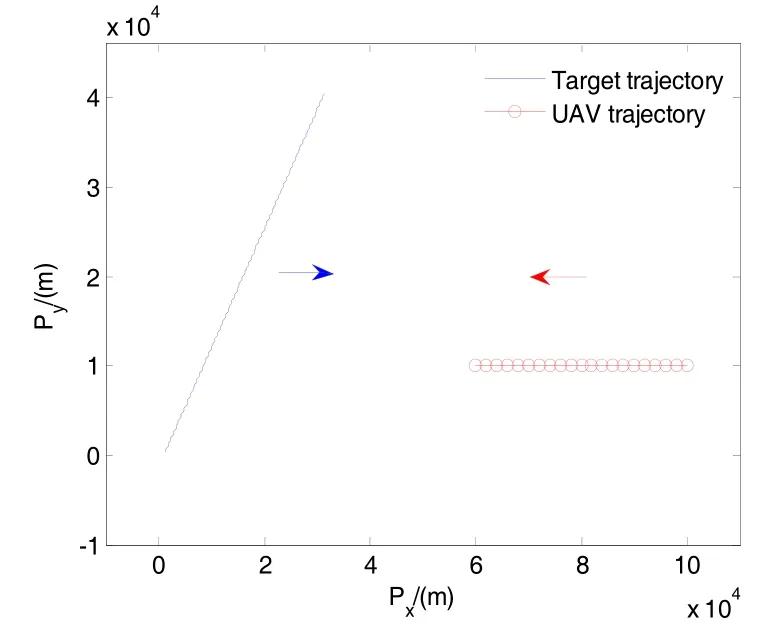
Fig.6 Geometry of scenario 2
3.2 Scenario 2
Obstacle does Singer maneuvering:it assumes that the obstacle accelerationa(t) is a zero-mean first-order Markov process.And the UAV moves towards the obstacle with constant speed 50 m/s(in red).Fig.6 shows a representative trajectory of the obstacle and UAV.
The corresponding discrete-time system model is

Where,

The parameterα=1/τmis the reciprocal of the maneuver time constantτm,the smallerτmis,the more fierce motion dynamic is (hereτm=20);Tis the sample time;ax(k) anday(k) are the two direction accelerations.
As the EO sensors are installed on the airplane for observing the position of the obstaclePx(k) andPy(k) at timek,the measurement equation for the obstacle position is given by:

The position error,velocity error and turning rate error are shown in Fig.7~Fig.9 and Table 3.The same as the previous example,red lines represent the estimation error with QKF,the blue dotted lines are the estimation error with UKF.
A set of figures (Fig.7 to Fig.9) show that the errors associated with position,velocity and acceleration of the time-varying accelerating dynamic model with QKF and UKF for 10 min,respectively.It can be easy to see that the QKF provides the improved accuracy of dynamic parameters.In particular,the velocity and acceleration errors show that the convergence can be reached as rapidly as 25 s with QKF,while almost 100swith UKF from Fig.8 and Fig.9.Also,the comparison of mean values and RMSEs from Tab.2 further verify the above conclusion.
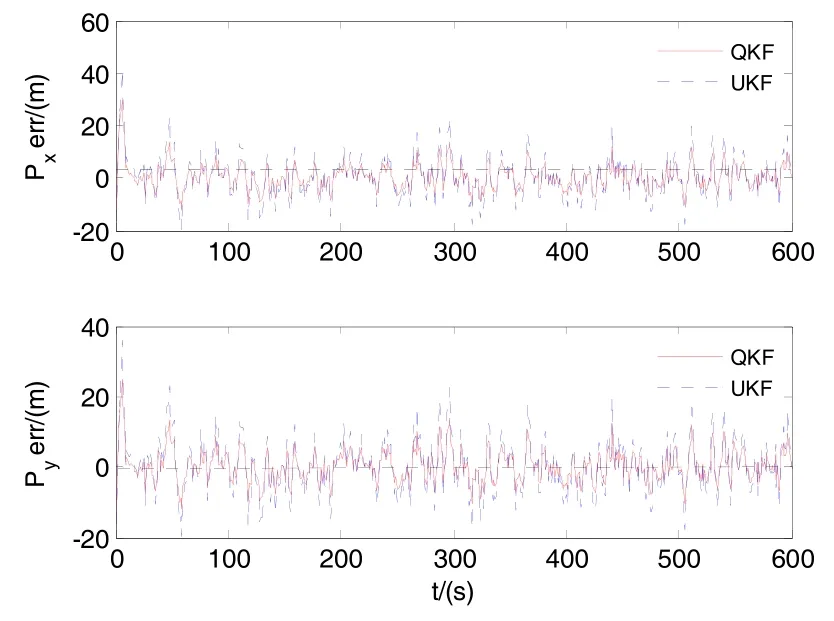
Fig.7 Position errors of QKF and UKF in scenario 2
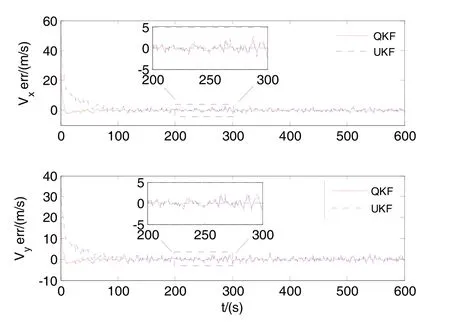
Fig.8 Velocity errors of QKF and UKF in scenario 2
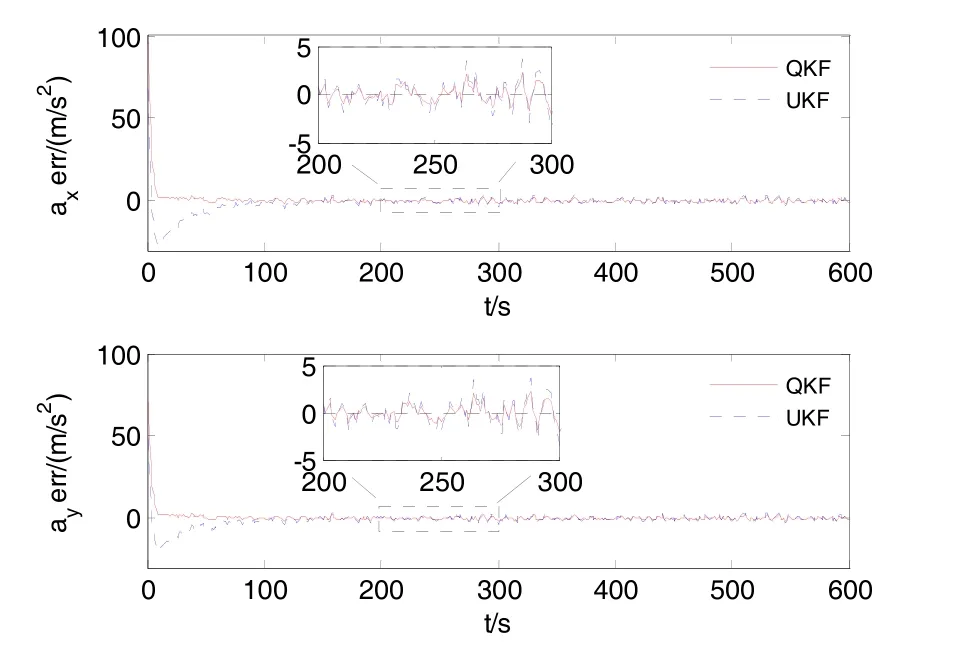
Fig.9 Acceleration errors of QKF and UKF in scenario 2
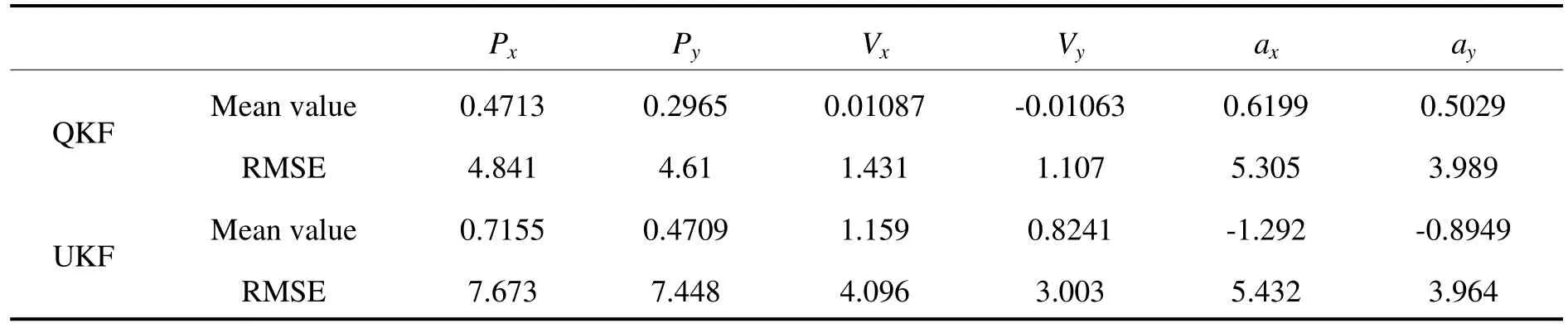
Tab.2 Statistical parameters in scenario 2
4 Conclusion
A real-time multi-sensor obstacle detection algorithm to be embedded in an S&A system has been proposed in this paper.The established S&A system architecture is composed of navigation unit and detection unit.The navigation unit was based on the integration of GPS and Strap-down Inertial Navigation System,while the detection unit is composed of radar and two EO sensors.Sensors’ parameters and accuracy of the system design were also provided.Because air-traffic circumstances are always time-varying,resulting in the nonlinear detection system,a QKF has been adopted for its capability of avoiding nonlinear transmitting distortion problem by using weighted Gaussian quadrature points to sample the nonlinear system’s statistical properties.The QKF algorithm was introduced with its significance compared with other nonlinear algorithms,and the filtering process was elaborated with time update and measurement update steps.Furthermore,two typical dynamic scenarios:turning scenario and Singer motion scenario were tested with QKF.Turning scenario exemplified the improvement of radar detection in unknown turning rate motion through the measure- ment of range and elevation;while Singer motion scenario tested obstacle motion with first-order Markov time-varying acceleration by the extracted position from EO sensors’ measurement.Both the numerical results were compared with UKF to highlight the benefit of the QKF of higher accuracy and faster convergence rate through the simulation.Based on the results,data association and data fusion with interacting multi-models Quadrature Kalman Filter (IMMQKF) between different sensors will be explored to fulfill S&A system and test practically in the future.
[1]Kephart R J,Braasch M S.Comparison of see and avoid performance in manned and remotely piloted aircraft[C]//2008 IEEE/AIAA 27th Digital Avionics Systems Conference.St.Paul,Minnesota,2008:4.D.2-1– 4.D.2-8.
[2]Zsedrovits T,Zarándy á,Vanek B,et al.Collision avoidance for UAV using visual detection[C]//IEEE International Symposium on Circuits and Systems.Rio de Janeiro,2011:2173-2176.
[3]Euliss G,Christiansen A,Athale R.Analysis of laserranging technology for sense and avoid operation of unmanned aircraft systems:the tradeoff between resolution and power[C]//Proc.SPIE 6962,Unmanned Systems Technology X.Orlando,Florida,2008,Vol.6962:696208-1~ 696208-10.
[4]Lai J,Mejias L,Ford J J.Airborne vision-based collisiondetection system[J].Journal of Field Robotics,2011,22(2):137-157.
[5]Fasano G,Forlenza L,Tirri A E,et al.Multi-sensor data fusion:A tool to enable UAS integration into civil airspace[C]//IEEE/AIAA 30th Digital Avionics Systems Conference(DASC).Seattle,WA,2011:5C3-1–5C3-15.
[6]Fasano G,Accardo D,Moccia A.Multi-sensor-based fully autonomous non-cooperative collision avoidance system for unmanned air vehicles[J].Journal of Aerospace Computing,Information,and Communication,2008,5(10):338-360.
[7]Fasano G,Forlenza L,Accardo D,et al.Data fusion for UAS collision avoidance:results from flight testing[C]//Proceedings of the AIAA Infotech at Aerospace Technical Conference.St.Louis,Mo,USA,2011,Vol.1458:1-16.
[8]Singer R A.Estimating optimal tracking filter performance for manned maneuvering targets[J].IEEE Transactions on Aerospace and Electronic Systems,1970,AES-6(4):473-483.
[9]Julier S J,Uhlmann J K,Durrant-Whyte H F.A new approach for filtering nonlinear system[C]//Proceeding of the 1995 American Control Conference.Seattle WA,1995,Vol.3:1628-1632.
[10]Ito K,Xiong K.Gaussian filters for nonlinear filtering problems[J].IEEE Trans.Auto.Control,2000,45(5):910-927.
[11]Wuand C L,Han C Z.Tracking ballistic target based on square root quadrature Kalman filter[J].Control and Decision,2010,25(5):721-729.
[12]Liu X,Jiao S L,Si X C.Measure space square root quadrature Kalman filter for airborne passive location[J].Journal of Xi’an Jiaotong University,2011,5(5):137-142.
[13]Jia B,Xin Ming,Cheng Y.Sparse Gauss-Hermite quadrature filter with application to spacecraft attitude estimation[J].AIAA Guidance,Navigation,and Control,2011,34(2):367-379.
[14]Li J W,B.Jia,M.Mazzola,and,M.Xin,On-line battery state of charge estimation using Gauss-Hermite quadrature filter[C]//IEEE 27th Applied Power Electronics Conference and Exposition.Orlando,FL,2012:434-438.
[15]Jia B,Xin M.Vision-based spacecraft relative navigation using sparse-grid quadrature filter[J].IEEE Transactions on Control Systems Technology,2012,99:1595-1606.
[16]Arasaratnam I,Haykin S,Elliott R J.Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature[J].Proceedings of the IEEE,2007,95(5):953-997.
1005-6734(2014)03-0333-07
10.13695/j.cnki.12-1222/o3.2014.03.011
非協(xié)作式無人機跟蹤障礙物改進方法
朱立華1,2,程向紅1,曹振新2,F(xiàn)uh-Gwo Yuan3
(1.東南大學 微慣性儀表與先進導航技術教育部重點實驗室,南京 210096;2.東南大學 毫米波國家重點實驗室,南京 210096;3.北卡羅來納州立大學 航天與機械工程學院,美國 羅利 27695)
針對非協(xié)作式無人機檢測與避障系統(tǒng),采用多傳感器進行信息融合的方式進行檢測與跟蹤,提出了采用正交積分點卡爾曼濾波(QKF)實時跟蹤運動目標以提高檢測精度和增強有效性。首先,對設計的檢測與避障系統(tǒng)進行了簡述,由兩個子系統(tǒng)構成:由捷聯(lián)慣性導航系統(tǒng)(SINS)與GPS組成的導航單元及由雷達和光電傳感器組成的檢測單元。其次,以拐彎模型與Singer模型兩個機動運動模型為例測試了QKF算法跟蹤檢測障礙物的性能,并與無跡卡爾曼濾波(UKF)進行比較。仿真結果表明,相比于UKF算法,QKF算法可以更快速、更準確的檢測與跟蹤目標。
無人機;檢測與避障系統(tǒng);非協(xié)作式;非線性運動;正交積分點卡爾曼濾波
U666.1
A
Unmanned Aircraft Vehicles (UAVs) have been used in military field for various missions such as airspace surveillance,target tracking,terrain reconnaissance.Recently the interest is expanding into the civil use.Tasks like dull,dirty,dangerous,aerial mapping,crop monitoring and crime surveillance,are well suited to the application of UAV for their obvious advantages.And according to a UAV TODAY review of federal records,U.S.airplane collision has killed an average of 30 people a year since 1982.As a result,the UAV safety problem has become a big issue with the increasing aircraft systems.
2014-02-26;
2014-04-14
東南大學優(yōu)博基金(YBJJ1242)
朱立華(1985—),女,博士研究生,從事慣性技術及無人機檢測與避障技術研究。E-mail:julie19850308@gmail.com
聯(lián) 系 人:Yuan Fuh-Gwo(1955—),男,教授,博士生導師。E-mail:yuan@ncsu.edu
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
電源技術(2016年9期)2016-02-27 09:05:39