靜止條件下的月球車INS/CNS自主初始化方法
2014-08-02 12:03:03寧曉琳劉玲玲
中國慣性技術(shù)學(xué)報 2014年2期
關(guān)鍵詞:方法
寧曉琳,劉玲玲
(1.慣性技術(shù)重點實驗室,北京 100191;2.新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點學(xué)科實驗室,北京 100191;3.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京 100191)
靜止條件下的月球車INS/CNS自主初始化方法
寧曉琳1,2,3,劉玲玲3
(1.慣性技術(shù)重點實驗室,北京 100191;2.新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點學(xué)科實驗室,北京 100191;3.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京 100191)
月球車工作前自身初始位置和姿態(tài)的確定對提高其導(dǎo)航能力具有重要作用,這一過程也稱為初始化,初始化精度將嚴(yán)重影響其后續(xù)導(dǎo)航性能。針對月面特殊環(huán)境,現(xiàn)有的應(yīng)用于地面環(huán)境的初始化方法不再適用這一問題,提出了一種靜止條件下的月球車INS/CNS自主初始化方法。該方法分為粗初始化和精初始化兩個階段,粗初始化主要為精初始化提供初始參數(shù)。精初始化則綜合利用慣性導(dǎo)航解算得到的水平速度、星光方位矢量和天體高度量測信息,并在考慮加速度計偏置引起的天體高度誤差的基礎(chǔ)上建立了精確的天體高度量測方程,精確估計月球車的初始位置和姿態(tài)。半物理仿真實驗表明當(dāng)陀螺漂移為0.1 (°)/h、加速度計偏置為10 μg、星敏感器精度為3″時,采用所提方法的初始位置估計精度優(yōu)于30 m,初始姿態(tài)估計精度優(yōu)于10″,是一種非常有效的月球車自主初始化方法。
月球車;自主初始化;慣性導(dǎo)航;天文導(dǎo)航
深空探測是航天活動的重要領(lǐng)域,月球探測是深空探測的起點。我國已成功發(fā)射“嫦娥一號”和“嫦娥二號”探月衛(wèi)星,獲得了7 m分辨率的全月球立體影像圖。在拓展任務(wù)中,“嫦娥二號”還成功的從月球軌道出發(fā)實現(xiàn)了對日地拉格朗日 L2點和“圖塔蒂斯”小行星的探測。2013年12月2日,“嫦娥三號”從西昌衛(wèi)星發(fā)射中心成功發(fā)射,并于12月14日成功軟著陸。12月15日,“玉兔號”月球車登陸月球并開始了其月面巡視勘察任務(wù)。月球車要提高生存能力并且成功完成科學(xué)探測任務(wù),就必須知道其在月面上的實時位置,即導(dǎo)航。適用于月球車的導(dǎo)航方法主要有地面站測控和自主導(dǎo)航。由于深空探測距離較遠(yuǎn),環(huán)境未知,且通信延遲大,地面站測控在實時性,成本和資源上受到限制。自主導(dǎo)航主要分為絕對導(dǎo)航和相對導(dǎo)航。慣性導(dǎo)航、航位推算和視覺里程計[1]等相對導(dǎo)航方法在工作前必須獲取絕對的初始位置和姿態(tài),獲取這些信息的過程被稱為初始化,初始化的精度將嚴(yán)重影響后續(xù)導(dǎo)航性能。
在地面上,初始位置通常由GPS或其它地面設(shè)備獲取,但是月面上沒有GPS,依靠地面測控站獲得的位置精度僅為公里級。對于初始姿態(tài),地面上通常利用光學(xué)設(shè)備或慣性導(dǎo)航系統(tǒng)自對準(zhǔn)獲取。慣性導(dǎo)航系統(tǒng)自對準(zhǔn)[2]是通過敏感當(dāng)?shù)刂亓Ψ较蚝偷厍蜃赞D(zhuǎn)角速度北向分量來實現(xiàn)的,其對準(zhǔn)精度不僅取決于陀螺和加速度計的精度[3],而且還依賴于天體自身的重力加速度和自轉(zhuǎn)角速度的量級。例如,當(dāng)陀螺漂移為 0.1(°)/h,加速度計零偏為10 μg時,在地面上緯度為40°的位置得到俯仰角和橫滾角的估計誤差約為2.0626″,航向角的估計誤差約為 22.9498′。然而在月面上,由于月球重力加速度為1.618 m/s2(約為地球的1/6),月球自轉(zhuǎn)角速度為0.55 (°)/h(僅為地球的1/27),在相同條件下的俯仰角和橫滾角的估計誤差可達(dá) 12.4681″(為地面對準(zhǔn)的6倍),航向角的估計誤差高達(dá)到627.0256′(為地面對準(zhǔn)的27倍)。因此,必須借助其他信息輔助慣導(dǎo)實現(xiàn)初始化。
天文導(dǎo)航通過觀測自然天體可以同時提供位置和姿態(tài)信息,其導(dǎo)航精度不受時間和距離長短的影響[4]。利用天文信息輔助慣導(dǎo)實現(xiàn)月球車的初始化是一種可行的方法。目前,INS/CNS組合導(dǎo)航已廣泛應(yīng)用于飛機,彈道導(dǎo)彈等運動載體上[5-7]。由于載體在運動時受水平加速度的影響,無法獲取高精度的水平信息,此時天文導(dǎo)航不能提供位置信息,只能提供姿態(tài)信息。而對于處于靜止?fàn)顟B(tài)的月球車,由于沒有水平運動加速度的干擾,利用加速度計等重力敏感器件等可獲得高精度的水平基準(zhǔn),結(jié)合星敏感器的測量信息,就可獲得天體高度,并進(jìn)一步獲得月球車的位置。因此,在靜止條件下,天文導(dǎo)航可以輔助慣性導(dǎo)航實現(xiàn)初始位置和姿態(tài)的獲取,而其核心問題則是探索如何降低敏感器誤差的影響,提高估計的精度。
本文針對月球車自主初始化的需求,研究了一種INS/CNS自主初始化方法,該方法分為粗初始化和精初始化兩個階段。粗初始化直接利用天文導(dǎo)航提供的星光方位矢量和天體高度量測信息為精初始化提供粗略的初始參數(shù)。在精初始化階段,量測方程采用了考慮加速度計偏置的天體高度精確量測方程,并在基礎(chǔ)上綜合利用慣性導(dǎo)航解算得到的水平速度、星光方位矢量和天體高度量測信息,精確估計月球車的初始位置和姿態(tài)以及慣性器件的誤差。
1 月球車的INS/CNS自主初始化方法
1.1 坐標(biāo)系
月球慣性坐標(biāo)系omxiyizi的坐標(biāo)原點在月球質(zhì)心om,xi軸在赤道面內(nèi),指向春分點;zi軸垂直于赤道面,與月球自轉(zhuǎn)角速度矢量一致;yi軸與xi軸和zi軸垂直,構(gòu)成右手坐標(biāo)系。月球固連坐標(biāo)系omxmymzm與omxiyizi有相同的坐標(biāo)原點和z軸,其xm軸在赤道面內(nèi),指向0°經(jīng)線;ym軸與xm軸和zm軸垂直,構(gòu)成右手坐標(biāo)系。導(dǎo)航坐標(biāo)系oxnynzn的坐標(biāo)原點在月球車質(zhì)心o,xn軸指東,yn軸指北,zn軸指天。月球車本體坐標(biāo)系oxbybzb的原點也在月球車質(zhì)心o,xb軸沿月球車運動方向,zb軸垂直與月球車本體對稱面,yb軸與xb軸和zb軸垂直,構(gòu)成右手坐標(biāo)系。
1.2 慣性導(dǎo)航子系統(tǒng)
慣性導(dǎo)航是利用陀螺儀和加速度計測量目標(biāo)相對于慣性空間的角速度和加速度,并通過積分獲取目標(biāo)的位置、速度和姿態(tài)。因此,慣導(dǎo)工作前必須獲取初始時刻的位置、速度和姿態(tài),即初始化。這些初始導(dǎo)航信息的精度將嚴(yán)重影響到慣導(dǎo)的導(dǎo)航性能。由于慣導(dǎo)自身存在著誤差隨時間累積的缺點,為了提高導(dǎo)航精度,還必須對慣性器件的誤差進(jìn)行估計。當(dāng)月球車處于靜止?fàn)顟B(tài),慣導(dǎo)解算得到的水平速度即速度誤差,其中雖然包含了位置誤差、姿態(tài)誤差、陀螺漂移和加速度計偏置等信息,但是,僅僅利用這一量測信息并不能估計出這些初始參數(shù),尤其是在月面低重力加速度、低自轉(zhuǎn)角速度這一特殊情況下,僅憑慣性導(dǎo)航系統(tǒng)自身根本無法實現(xiàn)。
1.3 天文導(dǎo)航子系統(tǒng)
天文導(dǎo)航是以已知準(zhǔn)確空間位置的自然天體為基準(zhǔn),通過天體測量儀器測得的天體高度和星光方位矢量等信息進(jìn)行導(dǎo)航。天體高度是天體投影點GP與月球車位置(L,)λ的函數(shù),它們之間的關(guān)系為:

式中,Δ、RA分別為天體赤緯和赤經(jīng)。
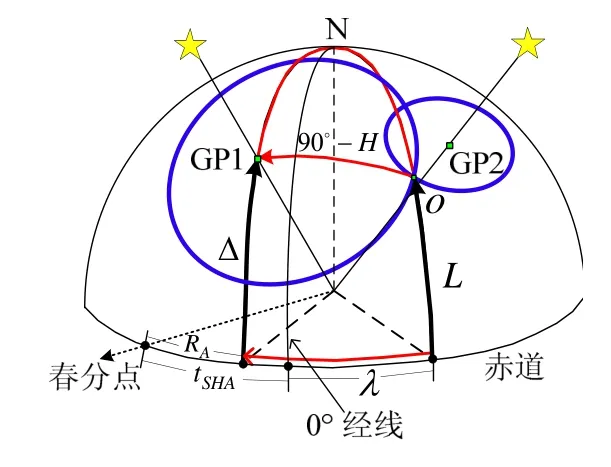
圖1 天文定位原理Fig.1 The principle of celestial localization
通過測量一個天體的高度,就可以獲得關(guān)于月球車地理位置的信息,月球車必位于以該天體投影點GP為圓心,以天體頂距(90°-H)為半徑的位置圓上,如圖 1所示。通過觀測兩個以上天體,就可通過解析高度差等方法確定月球車的位置。天體高度通常利用傾角計測量得到的當(dāng)?shù)厮椒较蚝托敲舾衅鳙@取的星光方位矢量獲取。
利用恒星敏感器獲得的二維圖像可獲得星敏感器坐標(biāo)系下恒星星光方向的單位矢量,同時該天體在月球慣性坐標(biāo)系中的方向矢量si為:

ss與si的關(guān)系為:

由式(1)可以看出,天文導(dǎo)航的定位精度主要取決于天體高度的測量精度。由于式(3)中的位置矩陣與姿態(tài)矩陣是耦合在一起的,因此,天文導(dǎo)航的定姿精度依賴于定位精度。也就是說,天文導(dǎo)航的性能主要取決于天體高度的測量精度。天體高度利用加速度計提供的水平基準(zhǔn)和星敏感器提供的星光方位矢量獲取。由于星敏感器的精度很高,天體高度的測量精度主要取決于加速度計的測量。如果加速度計的測量誤差能夠修正,則定位精度將會明顯提高。
1.4 INS/CNS自主初始化方法
為了提高后續(xù)導(dǎo)航精度,慣導(dǎo)在工作前不僅需要獲取高精度的初始位置和姿態(tài),并且需要盡可能估計出慣性器件誤差,而天文導(dǎo)航則需要修正天體高度測量誤差。
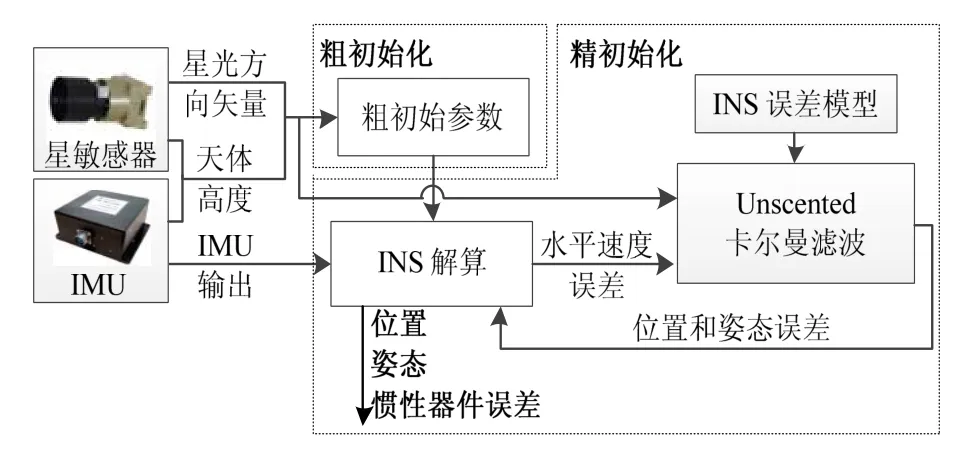
圖2 月球車INS/CNS自主初始化方法Fig.2 The lunar rover autonomous initialization method based on INS/CNS integration
圖2所示為本文提出的月球車自主初始化方法的基本框圖,該方法分為兩個階段:粗初始化階段和精初始化階段。粗初始化階段利用星光方向矢量和天體高度量測信息提供粗略的初始位置和姿態(tài),這也是后續(xù)精初始化階段所必須的初始參數(shù)。精初始化階段則綜合利用慣導(dǎo)捷聯(lián)解算得到的水平速度誤差,天文導(dǎo)航提供的星光方向矢量和天體高度量測信息,結(jié)合 INS誤差模型,通過Unscented卡爾曼濾波方法[8]精確估計出月球車的位置和姿態(tài),同時估計出慣性器件的誤差。
2 系統(tǒng)模型
2.1 粗初始化階段的系統(tǒng)模型
2.1.1 狀態(tài)方程1
粗初始化階段直接選取月球車的位置和姿態(tài)為狀態(tài)量,并將陀螺漂移和加速度計偏置擴展為狀態(tài)量。令,由于月球車靜止,于是有以下狀態(tài)方程:

2.1.2 量測方程1
粗初始化階段直接將星光方向矢量ss、天體高度H、加速度計輸出fb和陀螺輸出ωb作為量測量。
將加速度計輸出和陀螺輸出作為量測量,相應(yīng)有:


式中,V1為量測噪聲。
2.2 精初始化階段的系統(tǒng)模型
粗初始化過程算法簡單,速度快,但并沒有考慮天體高度測量誤差的影響,初始化精度不高。為此,在精初始化階段,采用INS誤差方程作為狀態(tài)方程,充分考慮加速度計偏置對天體高度測量誤差的影響,并建立了精確的量測方程。
(5)本工作是對改進(jìn)型DIC技術(shù)在靜壓樁室內(nèi)模型試驗中應(yīng)用的初步探討,通過試驗對砂土中靜壓沉樁引起的樁-土界面土體位移規(guī)律進(jìn)行了分析研究,研究結(jié)果對揭示樁-土界面本構(gòu)關(guān)系有一定的參考意義.
2.2.1 狀態(tài)方程2
地面上靜止條件下慣導(dǎo)系統(tǒng)自對準(zhǔn)通常采用INS誤差方程作為狀態(tài)方程[9],選取慣導(dǎo)系統(tǒng)解算得到的水平速度誤差作為量測量,該方法的可觀測性較差,許多狀態(tài)量不可觀測[10]。本文所提出的月球車自主初始化方法由于引入了天文觀測信息,獲得的有效信息大大增加,因此不僅可以精確估計出月球車的初始位置和姿態(tài),還可以估計出慣性器件誤差。
由于星敏感器可以提供的高精度姿態(tài)信息,粗初始化結(jié)束后,姿態(tài)誤差穩(wěn)定在小失準(zhǔn)角范圍內(nèi)。因此,精初始化階段采用基于小失準(zhǔn)角的INS誤差方程[11],如式(7)所示:
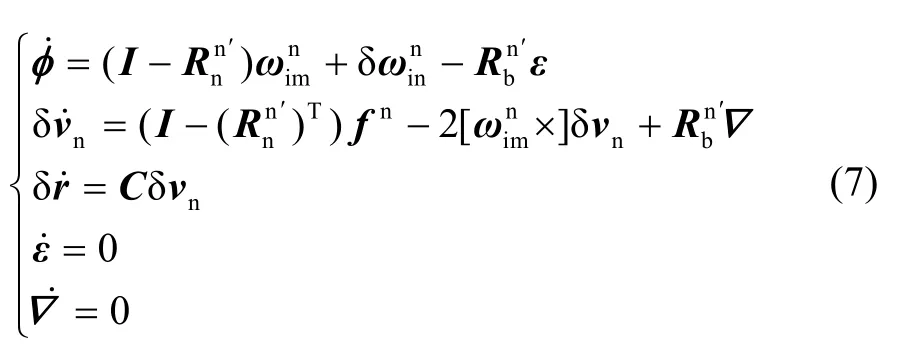

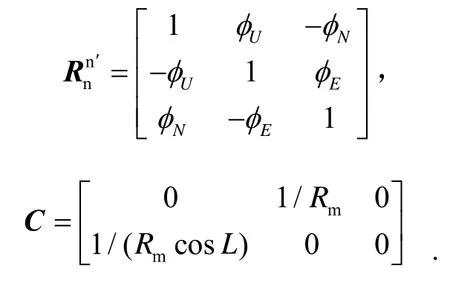
令狀態(tài)量為:
式中,W為系統(tǒng)噪聲矢量。
2.2.2 量測方程2
精初始化階段的量測信息不僅包括慣導(dǎo)解算的水平速度誤差,而且包括星光方位矢量和天體高度。1)水平速度誤差
月球車靜止時慣導(dǎo)解算得到的水平速度即為速度誤差δV,相應(yīng)的量測方程為:
星敏感器坐標(biāo)系下星光方位矢量的量測方程可以由式(10)表示:

3)天體高度
天體高度利用加速度計提供的水平基準(zhǔn)和星敏感器提供的星光方位矢量獲取。當(dāng)加速度不存在測量誤差時,

式中,fbr為不存在測量誤差時的加速度計輸出,sb為本體坐標(biāo)系下的星光方向矢量。當(dāng)加速度存在測量誤差時,
將式(11)代入式(12)可以得到:

式中,V2為量測噪聲。
3 半物理仿真
本節(jié)通過半物理仿真測試該月球車自主初始化方法的性能。
3.1 仿真條件
本文采用自行研制的月球車地面導(dǎo)航測試系統(tǒng)進(jìn)行該方法的半物理仿真,所有的仿真數(shù)據(jù)都由圖 3所示的半物理仿真系統(tǒng)產(chǎn)生。該系統(tǒng)由一個IMU、一個星圖模擬系統(tǒng)和一個導(dǎo)航計算機組成。IMU由三個正交安裝的光纖陀螺和三個正交安裝的石英加速度計構(gòu)成,并沿月球車本體系的三個坐標(biāo)軸安裝。將IMU提取的噪聲數(shù)據(jù)和利用月球車的位置和姿態(tài)獲取的理想輸出數(shù)據(jù)相加作為IMU的實際輸出。
星圖模擬系統(tǒng)由一個星圖模擬器和一個星敏感器組成。星敏感器的安裝坐標(biāo)系與月球車本體系重合,其光軸指向月球車本體系z軸方向。根據(jù)所選定的月球車的位置和姿態(tài)及星敏感器光軸指向信息,通過星圖預(yù)處理、星圖識別、質(zhì)心提取等獲取星敏感器坐標(biāo)系和月面慣性坐標(biāo)系下的星光矢量信息。然后,將這些量測信息輸入導(dǎo)航計算機進(jìn)行仿真校驗。
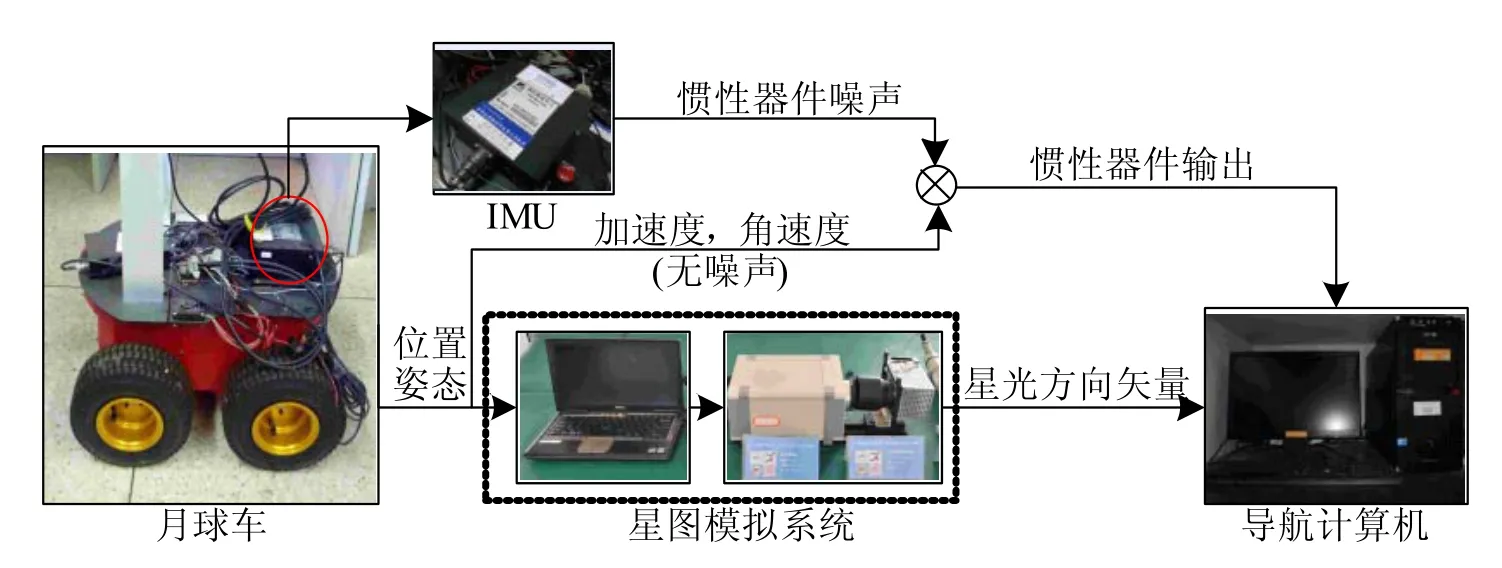
圖3 半物理仿真系統(tǒng)Fig.3 Semi-physics simulation system
月球車的位置選為我國“玉兔號”月球車的著陸點(44.1260°N,19.5014°W),初始航向角、橫滾角和俯仰角分別為20°、0°和0°。陀螺的常值漂移為0.1(°)/h(1σ),加速度計的常值偏置為10 μg(1σ),二者的采樣頻率均為100 Hz。星敏感器選用北航自主研制的星敏感器,精度為3″(1σ),更新頻率為5 Hz。仿真中,月球車靜止,初始位置誤差為1 km。初始俯仰角和橫滾角誤差均為1°,初始航向角誤差為10°。濾波周期為0.2 s,總仿真時間為5 min。
3.2 仿真結(jié)果
為了充分說明本文提出的月球車自主初始化方法的有效性和可行性,本節(jié)將該初始化方法與傳統(tǒng)的慣導(dǎo)自對準(zhǔn)方法進(jìn)行了仿真對比。
1)慣導(dǎo)自對準(zhǔn)方法
在上述仿真條件下,以慣導(dǎo)水平速度誤差作為量測量的慣導(dǎo)自對準(zhǔn)方法的估計結(jié)果如圖 4所示。由圖4 (a)可以看出該方法無法估計月球車的位置。由圖 4(b)可以看出,俯仰角和橫滾角能很快收斂到0°附近,收斂后的俯仰角和橫滾角估計誤差分別為10.8611″和-9.2322″。但是航向角無法收斂至真值,估計誤差約為485.9451′。從圖 4 (c)和(d)看出,陀螺漂移和加速度計偏置也無法估計。這是由于傳統(tǒng)的慣導(dǎo)自對準(zhǔn)方法的應(yīng)用前提是必須有準(zhǔn)確的初始位置。而當(dāng)初始位置存在誤差時,該方法對位置誤差無法進(jìn)行修正,且該位置誤差還會降低姿態(tài)的估計精度。
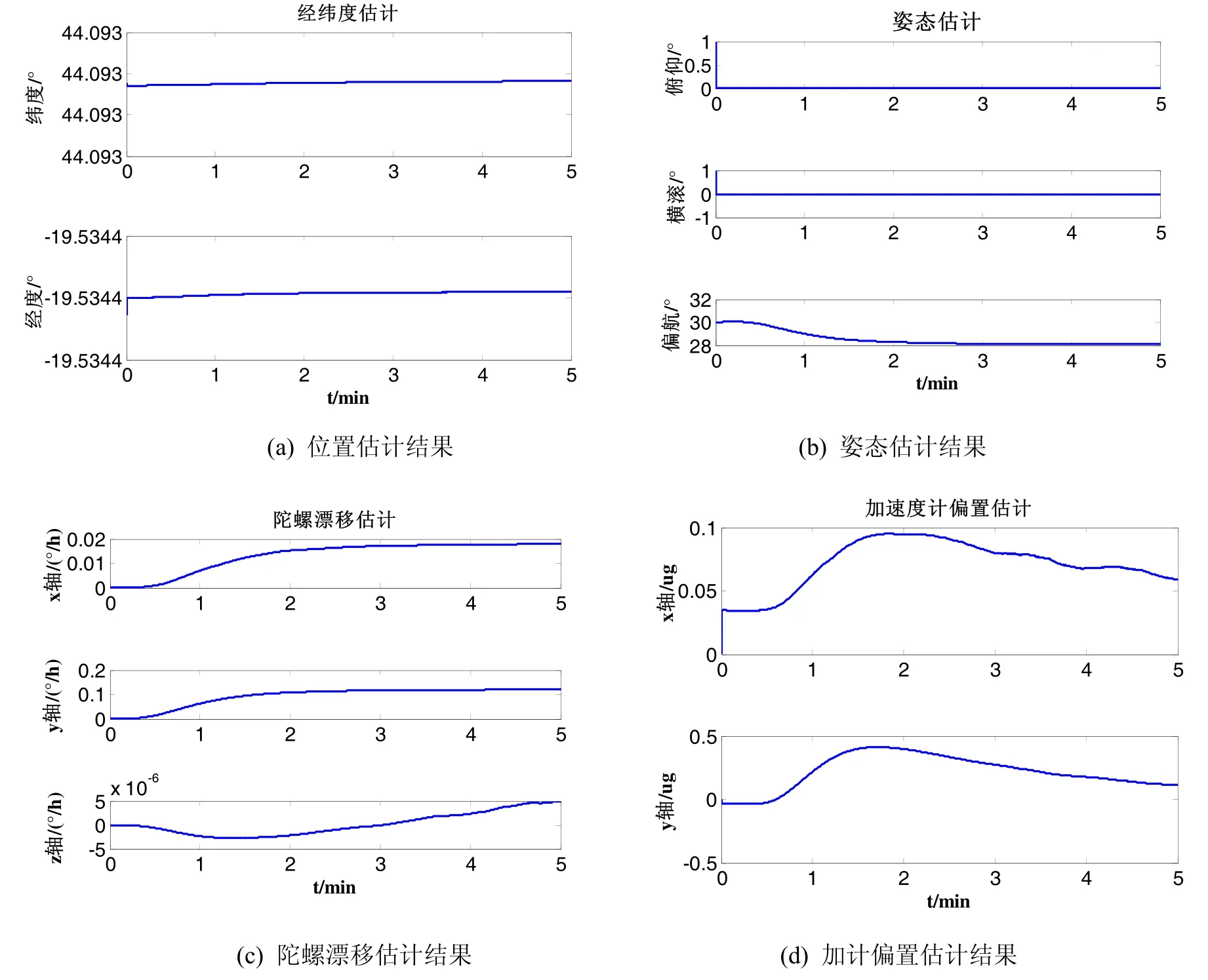
圖4 慣導(dǎo)自對準(zhǔn)的估計結(jié)果Fig.4 Estimation results of INS self-alignment method
2)粗初始化方法
粗初始化方法直接利用星光方向矢量和天體高度量測信息估計月球車的初始位置和姿態(tài)。圖 5為該粗初始化方法在上述仿真條件下的仿真結(jié)果。收斂后的經(jīng)、緯度分別約為19.4929°W和44.1296°N,相應(yīng)的東向和北向位置平均估計誤差分別為678.6207 m和396.9094 m。收斂后的俯仰角、橫滾角和偏航角分別約為0.0021°、-0.0078°和19.9940°,俯仰角、橫滾角和偏航角平均估計誤差分別為 7.6520″、-27.9287″和-21.4355″。由圖 5(c)和(d)可以看出,陀螺漂移可以估計,但水平加速度計偏置不能估計出來。該粗初始化過程不涉及捷聯(lián)解算,算法簡單,計算量較小,且速度較快。但該方法由于沒有考慮由于加速度計偏置所帶來的天體高度誤差,因此定位精度較低。同時,由于位置和姿態(tài)是相互耦合的,因此姿態(tài)的估計精度受位置估計精度的影響也較低。
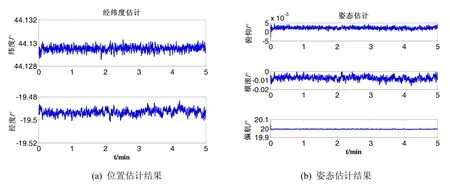
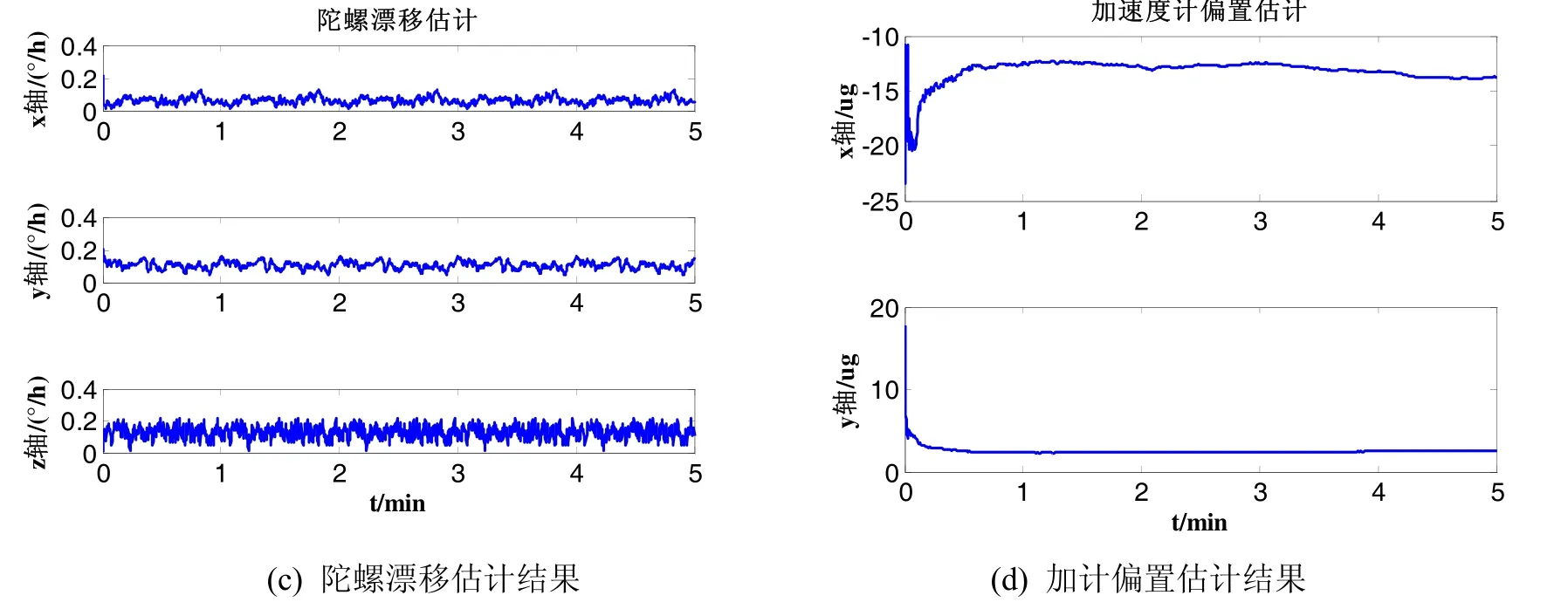
圖5 粗初始化方法的估計結(jié)果Fig.5 Estimation results of the coarse initialization method
3)本文方法
由于精初始化的捷聯(lián)解算部分必須要由粗初始化提供初始值,因此無法單獨使用。圖 6所示為精初始化方法的估計結(jié)果。從圖 6(a)和(b)可以看出,經(jīng)、緯度很快收斂到19.5014°W和44.1260°N附近,姿態(tài)也很快收斂到0°、0°和20°附近。收斂后的經(jīng)緯度平均估計誤差分別為 0.0179′ (9.0389 m)和 0.0503′(25.4019 m)。俯仰角、橫滾角和偏航角平均估計誤差分別為5.5588″、-5.0020″和-1.1415″。由圖 6 (c)和(d)可以看出,該方法可以估計出陀螺漂移和水平加速度計偏置。這是由于精初始化方法在考慮加速度計偏置引起的天體高度誤差的基礎(chǔ)上建立了精確的天體高度量測方程,從而可以對該部分誤差進(jìn)行估計并修正,從而提高了位置確定精度,相應(yīng)的姿態(tài)確定精度也隨之提高。
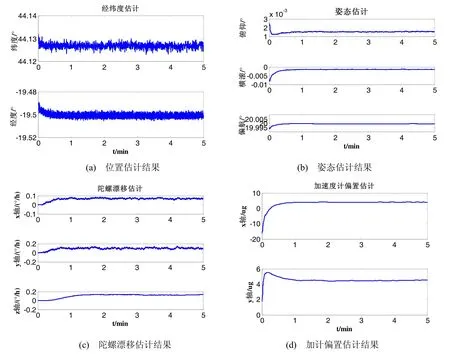
圖6 精初始化方法的估計結(jié)果Fig.6 Estimation results of the fine initialization method

表1 三種方法的仿真結(jié)果Tab.1 The simulation results of the three methods
表1給出了上述三種方法的詳細(xì)仿真數(shù)據(jù)。從表中數(shù)據(jù)可以看出傳統(tǒng)的慣導(dǎo)自對準(zhǔn)方法無法修正位置誤差,當(dāng)初始位置誤差較大時,姿態(tài)誤差也非常大。
粗初始化方法雖然由于加入了天體高度的量測信息,可實現(xiàn)對位置的修正,但由于該天體高度未考慮加速度計偏置帶來的測量誤差,因此位置精度也不高。
精初始化方法由于充分考慮了加速度計偏置對天體高度誤差的影響,因此顯著提高了位置的估計精度,而姿態(tài)估計精度也隨之提高。
4 結(jié) 論
本文針對月球車自主初始化的需求,研究了一種靜止條件下的月球車INS/CNS自主初始化方法。該方法分為粗初始化和精初始化兩個階段,粗初始化算法簡單,計算量較小,且速度較快,可以為精初始化提供初始參數(shù)。精初始化在考慮加速度計偏置引起的天體高度誤差的基礎(chǔ)上建立了精確的天體高度量測方程,使得月球車初始位置和姿態(tài)的估計精度大幅提高。仿真結(jié)果表明該方法的位置估計精度優(yōu)于30 m,姿態(tài)估計精度優(yōu)于10″,是一種非常有效的月球車自主初始化方法。利用該方法提供的初始導(dǎo)航參數(shù)可以極大的提高后續(xù)慣性導(dǎo)航系統(tǒng)和天文導(dǎo)航系統(tǒng)的導(dǎo)航精度。此外,該方法在實際工程應(yīng)用中還必需考慮星敏感器是否可以或可能受到強光而致盲,INS/CNS導(dǎo)航系統(tǒng)的重量是否可符合嫦娥三號月球車的要求等實際問題。因此我們后續(xù)還將會對星敏感器的安裝角度及其與太陽的關(guān)系,不同精度慣導(dǎo)對該初始化方法的影響等進(jìn)行深入分析。
(References):
[1]Lambert A,Furgale P,Barfoot T D,et al.Visual odometry aided by a sun sensor and inclinometer[C]//Proceedings of 2011 IEEE Aerospace Conference.Big Sky,2011,1-14.
[2]高偉,張鑫,于飛,等.基于狀態(tài)量擴充的捷聯(lián)慣導(dǎo)快速初始對準(zhǔn)方法[J].系統(tǒng)工程與電子技術(shù),2011,33(11):2492-2495.GAO Wei,ZHANG Xin,YU Fei,et al.Fast alignment method of SINS using measurement augmentation[J].Systems Engineering and Electronics,2011,33(11):2492-2495.
[3]Wang X L.Fast alignment and calibration algorithms for inertial navigation system[J].Aerospace Science and Technology,2009,13: 204-209.
[4]Ning X L,Fang J C.A new autonomous celestial navigation method for the lunar rover[J].Robotics and Autonomous System,2009,57(1): 48-54.
[5]Wu X J,Wang X L.A SINS/CNS deep integrated navigation method based on mathematical horizon reference[J].Aircraft Engineering and Aerospace Technology,2011,83(1): 26-34.
[6]王巖,張路,鄭辛,等.在飛航導(dǎo)彈中用星敏感器修正捷聯(lián)慣導(dǎo)陀螺漂移[J].中國慣性技術(shù)學(xué)報,2007,15(5):550-554.WANG Yan,ZHANG Lu,ZHENG Xin,et al.Correcting SINS gyro drift in winged missile by star sensor [J].Journal of Chinese Inertial Technology,2007,15(5):550-554.
[7]錢華明,孫龍,黃蔚,等.捷聯(lián)慣性/星光折射組合導(dǎo)航算法[J].哈爾濱工業(yè)大學(xué)學(xué)報,2013,45(9):52-56.QIAN Hua-ming,SUN Long,HUANG Wei,et al.SINS/RCNS integrated navigation algorithm[J].Journal of Harbin Institute of Technology,2013,45(9): 52-56.
[8]Shin E H,El-Sheimy N.An unscented Kalman filter for in-motion alignment of low-cost IMUs[C]//Proceedings of Position Location and Navigation Symposium.Canada,2004: 477-482.
[9]Tasadduq A,Zhang Y Y,Li Y J.SINS initial alignment for small tilt and large azimuth misalignment angles[C]//IEEE 3rd International Conference on Communication Software and Networks (ICCSN).Xi’an,China,2011:628-632.
[10]王榮穎,許江寧,卞鴻巍.基于可觀測性分析的方位旋轉(zhuǎn)式慣導(dǎo)初始對準(zhǔn)仿真研究[J].中國慣性技術(shù)學(xué)報,2009,17(1):15-19.WANG Rong-ying,XU Jiang-ning,BIAN Hong-wei.Initial alignment of azimuth rotating GINS based on observability analysis[J].Journal of Chinese Inertial Technology,2009,17 (1): 15-19.
[11]張金亮,秦永元,吳楓.捷聯(lián)慣導(dǎo)基于星體跟蹤器的高精度初始對準(zhǔn)算法[J].中國慣性技術(shù)學(xué)報,2013,21(1):22-25,36.ZHANG Jin-liang,QIN Yong-yuan,WU Feng.Precise SINS initial alignment algorithm based on star tracker[J].Journal of Chinese Inertial Technology,2013,21(1): 22-25,36.
New INS/CNS autonomous initialization method for lunar rovers on stationary base
NING Xiao-lin1,2,3,LIU Ling-ling3
(1.Science and Technology on Inertial Laboratory,Beijing 100191,China; 2.Fundamental Science on Novel Inertial Instrument & Navigation System Technology Laboratory,Beijing 100191,China;3.School of Instrument Science & Opto-electronics Engineering,Beijing University,Beijing 100191,China)
The determination of initial position and attitude of lunar rover has great influence on its navigation performance.The initialization accuracy has significant impact on the overall navigation accuracy.Since the traditional initial alignment method is not suitable for the lunar special environment,this paper presents a new autonomous initialization method for lunar rover based on INS/CNS integration.The method is divided into two stages: coarse initialization stage and fine initialization stage.The coarse initialization stage is mainly used to provide the initial parameters for the fine initialization stage.In the fine initialization stage,the horizontal velocity errors of INS,starlight vectors and star altitudes are used as measurements.The star altitude error caused by the biases of accelerometers is taken into account and its corresponding measurement equation is accurately established.Based on this,the position and attitude of the rover is estimated accurately.Semi-physics experiments show that the position precision is better than 30 m and the attitude precision is better than 10″ when the gyroscope drift is 0.1 (°)/h,the accelerometer bias is 10 μgand the star sensor accuracy is 3″.These results demonstrate that it is a promising and attractive autonomous initialization method for lunar rovers.
lunar rover; autonomous initialization; inertial navigation system; celestial navigation system
V448.22
:A
1005-6734(2014)02-0141-08
10.13695/j.cnki.12-1222/o3.2014.02.001
2013-11-18;
:2014-03-06
國家自然科學(xué)基金(61233005);新世紀(jì)優(yōu)秀人才支持計劃(NCET-11-0771);國家留學(xué)基金(201303070248)
寧曉琳(1979—),女,博士,副教授,博士生導(dǎo)師。E-mail:ningxiaolin@buaa.edu.cn
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
