基于模糊自適應PID控制器的差壓式管道檢測機器人速度控制系統設計
2014-08-02 01:16:06李著信李媛媛龔利紅劉澤山
化工自動化及儀表 2014年9期
關鍵詞:檢測
許 紅 李著信 李媛媛 龔利紅 劉澤山
(1.解放軍后勤工程學院,重慶 401311;2.92635部隊,山東 青島 266000)
差壓式管道內檢測機器人依靠流體壓能和動能產生的推力,隨著管內流體的流動而運動,不需要額外能源供應,是一種比較理想的檢測裝置,具有結構緊湊及無需額外動力源等優點。但長距離油氣輸送管道,內部空間有限,流體流速不穩定且管道環境較差,機器人的速度波動較大,不但影響機器人檢測探頭的數據精度,而且在彎管處出現機器人與管壁的撞擊將導致檢測元件損毀。因此需要加強機器人速度穩定性的研究,設計一個速度控制系統,實現機器人速度可控,運行穩定[1~4]。模糊自適應PID的發展給機器人速度控制技術的發展起到了很好的推動作用[5]。
1 差壓式管道檢測機器人基本結構和調速原理①
差壓式管道機器人由調速盤、機器人本體及
支撐機構等組成,其結構如圖1所示。當管內流體速度較低或機器人進入爬坡管道時,會引起機器人速度降低甚至因流體驅動力不足停止前進,可以利用蓄電池的能量驅動調速盤迎流面積變大,獲取更大的流體驅動力以保持恒定的速度運行,當機器人的速度高于恒定速度時,減小調速盤迎流面積;當管內流體速度較高或機器人進入下坡管道時,會引起機器人速度過快,首先可以通過減小調速盤迎流面積來減小驅動力,其次可以增大支撐機構與管壁的摩擦力以獲得較大的摩擦阻力來降低機器人的速度。每組支撐機構有3套支撐組件,包括電磁鐵、剎車元件、支撐輪和機身支撐桿,每個支撐組件之間的角度為120°,均勻地分布在機器人本體上。

圖1 差壓式管道檢測機器人結構示意圖
2 速度控制系統和控制流程
速度控制系統由以下幾部分組成:直徑大小可調的調速盤機械機構、剎車組件、控制部件和反饋部件。直徑大小可調的調速盤機械機構包括:步進電動機、傳動螺桿和調速盤。控制部件包括:控制器和數字控制電路。反饋部件包括:速度傳感器及位置傳感器等。剎車組件由電磁線圈、彈簧、支撐輪、剎車元件及機身支撐桿等組成。
機器人放進管道以后,速度傳感器發出模擬信號,經過模/數轉換,數字信號輸入到控制器,控制器處理速度信號以后,計算出當前工作間隙的大小,控制步進電動機正向或反向轉動的角度,由傳動螺桿帶動推拉桿動作,從而達到控制變速翼與管道之間間隙的目的,再通過位置傳感器的測量,反饋給處理器,計算出控制后的間隙值與預期的間隙值之差,再控制步進電動機來調整間隙,通過閉環控制,精確調節間隙和摩擦因數,最終實現控制機器人的速度。速度控制系統方框圖如圖2所示。
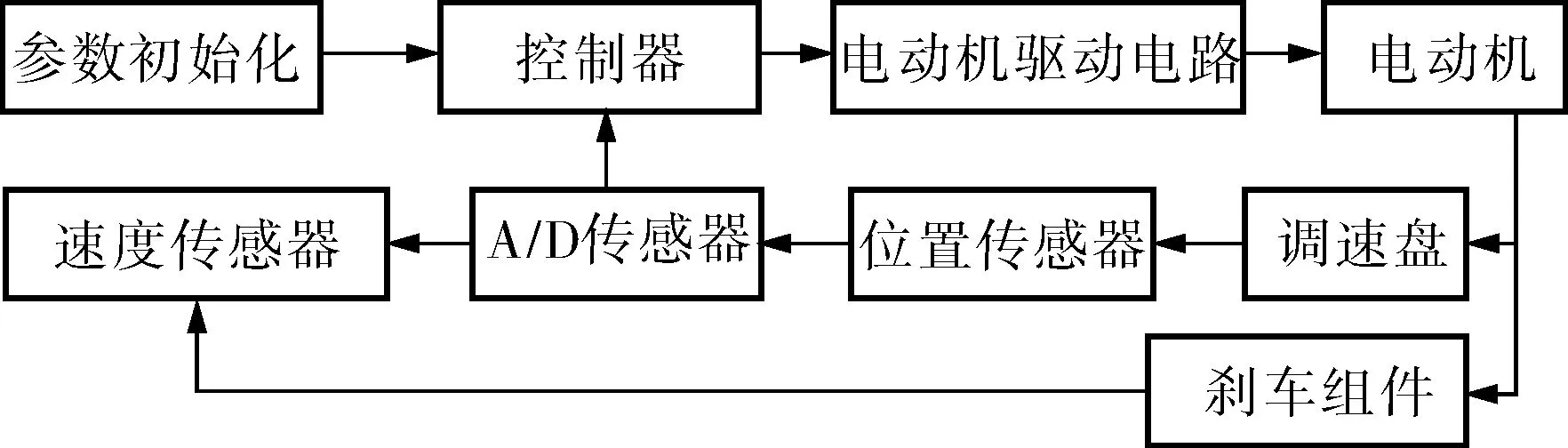
圖2 速度控制系統方框圖
首先,配置好機器人開始的工作狀態,包括機器人本體質量、調速盤的直徑大小、每個脈沖對應調速盤的大小和電磁鐵通電量分別對應的機器人運行速度的范圍。
當管道環境發生變化時,通過速度傳感器采集一定時間內當前機器人的移動速度,然后判斷當前機器人速度是否在正常工作速度范圍內。當機器人速度過快時,則根據偏離的速度值計算出需要改變的電磁鐵通電量,同時將調速盤直徑調至最小;當機器人速度過慢時,則根據偏離的速度值計算出需要改變的調速盤直徑大小,同時關閉通電線圈。機構控制方法及其流程如圖3所示。為了精確控制調速盤直徑大小或電磁鐵通電量,防止步進電動機發生失步現象,采用了閉環控制,通過傳感器的信號,計算出實際的調速盤直徑大小或電磁鐵通電量是否達到了預期的理論控制值,再修正步進電機的脈沖數,最終得到準確的參數,完成以后,更新當前的參數。

圖3 速度控制流程
3 基于模糊自適應PID的速度控制器設計
3.1 模糊自適應PID速度控制器原理
應用自適應控制思想,將模糊控制[6]和PID[7]控制相結合就構成了模糊自適應PID控制。其原理是運用基于模糊理論的模糊控制器,根據人工控制經驗對PID控制器的Kp、Ki、Kd3個參數進行整定[8,9]。
(1)
(2)
(3)

圖4 管道機器人速度模糊自適應PID控制器結構
3.2 模糊語言變量的確定
把速度誤差e和誤差變化率ec的精確值作為輸入語言變量,ΔKp、ΔKi、ΔKd作為輸出語言變量。把輸入語言變量的模糊輸入空間定義為輸入變量的基本論域,輸出語言變量的模糊輸出空間定義為輸出變量的基本論域。設速度誤差e的模糊基本論域為[-m,-m+1,…, 0,…,m-1,m],誤差變化率ec的模糊基本論域為[-n,-n+1,…, 0,…,n-1,n,],輸出控制變量ΔKp、ΔKi、ΔKd的模糊基本論域為[-k,-k+1,…,0,…,k-1,k]。模糊子集為{NB,NM,NS,ZO,PS,PM,PB},分別表示{負大,負中,負小,零,正小,正中,正大}。這種劃分能夠滿足該速度控制系統對較高品質的要求。
3.3 隸屬函數的確定
模糊化的實質就是找出輸入精確量對應的每個模糊子集的隸屬函數值。隸屬函數常用來表征模糊集合,確定隸屬函數和各個語言值的隸屬度就定義了一個模糊集合。隸屬函數一般是離散的,也可以是連續的。各模糊狀態的隸屬函數有正態形、對稱三角形及對稱梯形等。對稱三角形隸屬函數其形狀只與它的直線斜率有關,運算量小,所占內存空間也小,因此比較適合有隸屬函數在線調整的模糊控制。在此選三角形為語言變量的隸屬函數。輸入e、ec,輸出ΔKp、ΔKi、ΔKd的隸屬函數曲線分布如圖5所示。

圖5 e、ec、ΔKp、ΔKi、ΔKd的隸屬函數
3.4 模糊推理
控制規則是模糊控制器的核心。對于模糊自適應PID控制器,速度誤差e和誤差變化率ec在控制過程中對PID控制參數影響的基本規律為:
a. 誤差e較大時,為加快系統穩定速度,應取較大的Kp,消除偏差,同時Kd值應取小一點以避免e變大引起的微分飽和,對于Ki值應趨于零,避免系統產生較大超調;
b. 誤差e為中等值時,Kp應取一個較小值以減小超調,同時Ki、Kd取合適的值;
c. 誤差e較小時,為提高系統的穩態性能,Kp、Ki取值應大一些,同時Kd取一個合適的值。
根據上述e、ec對PID參數調整的基本規律,結合差壓式管道機器人在運行過程中的實際經驗,可以設計出管道機器人速度模糊自適應PID控制器模糊規則表。根據模糊控制規則表對速度誤差e和誤差變化率ec進行模糊推理,就可以得到輸出ΔKp、ΔKi、ΔKd的模糊集合。目前,使用較多的模糊推理方法有Baldwin法、Zadeh法及最大值最小值法等。管道機器人速度模糊自適應PID控制器采用最大值最小值法進行模糊推理,主要步驟為:
a. 計算速度輸入量e、ec的隸屬度。
b. 求前件部隸屬度。選取速度輸入量e、ec隸屬度最小值為最終的前件部隸屬度。
c. 求有效的后件部隸屬函數。以前件部的隸屬度切割后件部的隸屬函數,獲得有效的輸出結果。
d. 計算總結。綜合邏輯和運算所有結論,得到最終推理結果。
通過以上幾個步驟,利用e、ec的隸屬函數和ΔKp、ΔKi、ΔKd的模糊規則表最終求得ΔKp、ΔKi、ΔKd的模糊集。
3.5 解模糊
模糊推理得到的是模糊輸出量,而速度控制執行機構只能對清晰量進行識別,因此控制器必須把模糊量進行解模糊,使其轉化為精確量。解模糊化是模糊化的逆過程,加權平均法是模糊控制系統中應用比較廣泛的解模糊方法[10],即:
(4)
其中,yi為輸出模糊集合的第i個隸屬度值,也可稱為加權系數;ki為輸出模糊集合的第i個隸屬函數的權重。
實際處理中,上面的計算都是離線進行的,制成控制決策表并存放在計算機中,在控制過程中采用查表法來讀取數據,減少了在線計算時間,提高了系統的實時性。
4 結束語
在差壓式管道檢測機器人的基本結構與調速原理的基礎上,依據其速度控制流程,應用模糊自適應理論,結合模糊控制與PID控制,設計了能滿足差壓式管道機器人速度檢測需求的速度控制器,為進一步開發差壓式管道檢測機器人速度模擬仿真系統提供了理論依據。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
