化工驅動系統中無刷直流電機轉子監測研究
2014-08-02 01:16:06付光杰趙子明
化工自動化及儀表 2014年9期
關鍵詞:系統
付光杰 趙子明 鄒 偉
(1.東北石油大學電氣信息工程學院,黑龍江 大慶 163318;2.大慶中石油昆侖燃氣有限公司,黑龍江 大慶 163453)
無刷直流電機既具有優良的轉矩特性和寬闊而平滑的調速性能,又克服了機械換向裝置固有的缺點,因此在化學反應攪拌、離心分離及反應器均勻加熱設備等場合取代了其他種類的電機[1]。但使用位置傳感器有許多弊端,傳統的無位置傳感器技術是通過監測電壓或者電流來獲得轉子的位置信號,這不僅增加了監測裝置和連線,同時會使調速系統的電壓和電流受到影響,此外還要考慮電機啟動的問題[2]。為了更好地實現位置的監測,筆者提出了利用電機轉速信號直接進行轉子位置監測的方法。
1 傳統轉子位置監測技術及缺陷①
1.1 無刷直流電機的工作原理
無刷直流電動機的工作原理是,位置傳感器提供轉子當前的位置信號,控制器根據轉子的當前位置輸出驅動信號,通過換向驅動電路打開功率逆變橋相應的功率管,從而實現對電機三相繞組的換流控制。三相逆變橋式電路高壓側與低壓側都各有一個功率開關器件導通,構成電流通路,電機產生轉矩[3]。
1.2 傳統無位置傳感器監測方法的缺陷
針對位置傳感器所帶來的不利影響,無位置傳感器技術一直是國內外較熱門的研究課題。目前較為成熟的方法是反電動勢法。理想情況下,三相星形六狀態的無刷直流電機定子反電動勢波形如圖1所示。

圖1 三相反電動勢波形
但反電動勢法必須求得三相反電動勢信號,而在無刷直流電機建模過程中,梯形波反電動勢的求取一直是較難解決的問題,反電動勢波形不理想會造成轉矩脈動增大,嚴重時會導致換相失敗,電機失控。而且監測電壓或電流信號不僅需要電壓或電流監測硬件設備,還會對電路中的電壓或電流產生擾動,影響整個系統的調速精度,此外,當電機啟動時沒有有效的反電動勢,還需研究電機的啟動問題。
2 對無刷直流電機轉子監測方法的改進
2.1 利用電機轉速監測轉子的位置
2.1.1改進的位置監測系統構成
在電機調速系統中,往往形成轉速閉環。如果能將轉速信號同時用于無刷直流電機的轉子位置監測,不僅省去了位置傳感器、電壓或電流監測裝置,還提高了轉速信號的利用率。最大限度地減少硬件設備和連線,可以使電機進一步小型化,還消除了監測電壓或電流信號時對系統產生的擾動,提高了對轉速控制的準確性。利用轉速信號對轉子位置進行監測,就要找出轉速與轉子位置之間的對應關系,這里用角位移來作為轉速與轉子位置之間的聯系。改進的無位置傳感器無刷直流電機的結構框圖如圖2所示。

圖2 改進的無位置傳感器無刷直流電機結構框圖
2.1.2利用轉速監測轉子位置的原理
對于三相六狀態工作的無刷直流電機,一個運行周期轉子轉過的空間角度為2π,6個狀態分別對應不同的角度范圍。不同狀態下,相應的開關器件導通或者關斷。表1為各開關器件的導通順序。
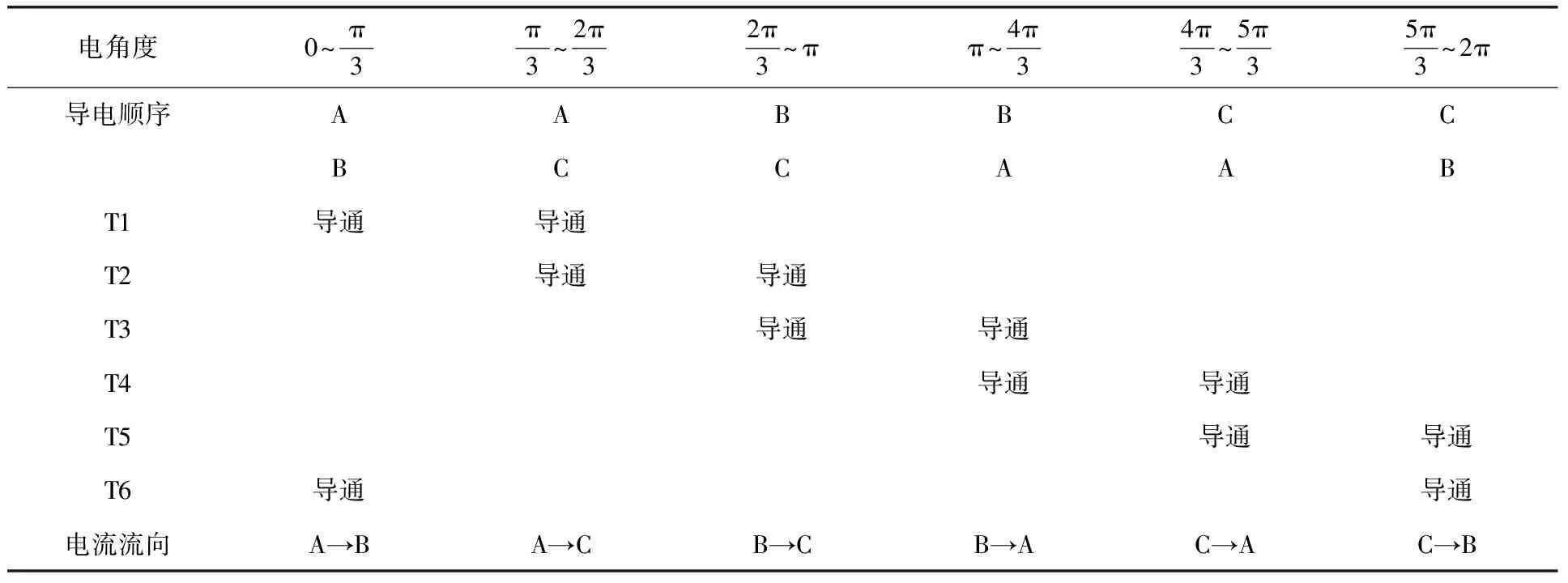
表1 各開關器件的導通順序
電機啟動后,設啟動的時刻為0時刻,啟動時電機轉子所處的位置角度為θ0*,那么隨著時間的延長,轉子轉過的角度也不斷增大,當轉子旋轉一周之后又回到初始位置,即角度為:
θ1*=θ0*+2π
(1)
轉子旋轉k周所處的位置為:
θk*=θ0*+2kπ (k∈Z)
(2)
在任意時刻轉子所處的位置為:
θn*=θ0*+θ*(t)+2kπ (k∈Z)
(3)
這樣轉子的位置θ*(t)便在0~2π之間進行變化,電機的轉速是隨時間變化而變化的函數:
(4)
其中,n0為電機啟動后t時刻的實際轉速,n(t)為電機啟動后t時刻的實際角速度,那么電機從啟動的那一時刻起,一直到時刻t,在這一時間段內,電機轉子所轉過的角度共為:

(5)
其中,θ0為假設的0時刻以前電機轉子所轉過的角度,隨著時間的不斷延續,電機轉過的角度也越來越大,但是電機的轉子旋轉一周,所轉過的角度為2π,為了與轉子所轉過的角度相對應,可以將電機轉子轉過的角度θ寫成周期函數的形式:
θ=θ0+θ(t)+2kπ (k∈Z)
(6)
將電機轉子轉過的實際總角度進行脫周期,那么所得到的θ(t)就在0~2π之間反復變化,這樣就可以與電機轉子轉過一周的空間角度為2π相對應,即將θ*(t)與θ(t)相對應,也就確定了轉子的位置。
2.1.3轉子監測的實現流程
轉子位置監測流程如圖3所示。

圖3 轉子位置監測流程
要保證監測轉速信號的無位置傳感器無刷直流電機的正常啟動與運行,只需滿足以下兩個式子即可:
θ0=θ0*
(7)
θ*(t)=θ(t)
(8)
正常情況下只需在電機啟動時滿足式(7),那么式(8)便會在電機的運行過程中自動滿足,因此在電機啟動的時刻滿足式(7)是整個轉子位置監測的關鍵。為了滿足式(7)的條件,應在整個電機調速系統搭建完畢后進行一次校對,這樣整個調速系統便會自動運行,當電機需要再次啟動時,可以將前一次停止時刻θ0與θ0*的信息進行存儲,這樣整個調速系統就可以多次啟動和停止。
2.2 轉速監測轉子位置的實現

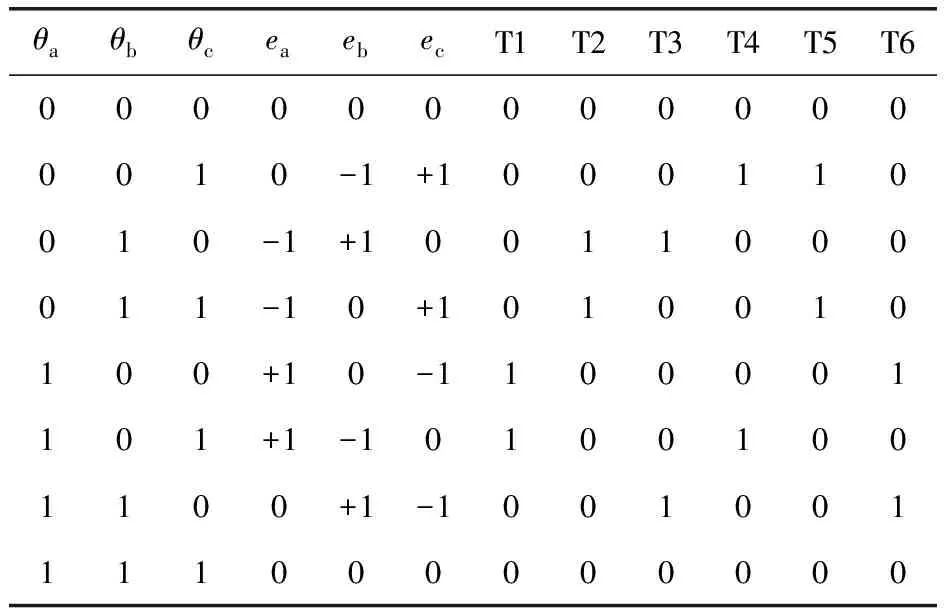
表2 解碼器與門極驅動控制器的控制規則
2.3 無位置傳感器無刷直流電機調速系統的構建
無刷直流電機與普通直流電機都具有很好的調速性能,使用PI控制就可以基本滿足對調速的要求,這里的調速系統使用的是單閉環結構,調速系統的結構框圖如圖4所示。

圖4 調速系統的結構框圖
在傳統的PI控制中,比例系數Kp與積分系數Ki是固定不變的,但在電機啟動的過程中,由于給定轉速與電機的實際轉速之間相差比較大,采用固定系數的PI控制效果往往不夠理想。為了增加調速系統的快速性并增加調速范圍,筆者根據電機轉速誤差的大小來對PI控制參數進行在線調節,誤差越大所采用的比例系數越大,這樣有利于快速糾正誤差,增加系統的快速性。
3 仿真與分析
3.1 仿真模型的建立
利用MATLAB仿真軟件建立無位置傳感器無刷直流電機轉子自監測裝置,根據電機的轉速判斷轉子位置的模型如圖5所示[6]。

圖5 轉子位置判斷模型
在轉子位置監測模塊中,需要對電機轉子旋轉的角位移進行脫周期,使角位移的數值落在一個周期即[0,2π]范圍內,這里脫周期采用S函數的方法。在判斷轉子位置的信號時,同樣使用S函數來產生表示轉子位置的特征序列。無刷直流電機額定轉速為3 500r/min,額定電壓為600V,額定負載為10N·m,仿真時間為0.2s,無刷直流電機采用空載狀態下啟動,在0.1s時加入額定負載并產生擾動。在綜合考慮調整時間、超調量、誤差與抗擾性的基礎上,經過反復測試并在2%的誤差允許范圍內確定無刷直流電機的調速范圍是1 000~3 500r/min。
3.2 仿真
采用轉速進行轉子位置監測時,在給定轉速3 000r/min的情況下,電機的轉速波形如圖6所示。從圖6中可以看出,在利用轉速對無刷直流電機進行轉子位置監測時,電機可以實現正常穩定運行。圖7、8給出了在不同給定轉速下的轉速波形。從這些轉速波形來看,利用轉速來對轉子位置進行監測的方法可以適用于調速范圍比較寬的調速系統中,在較大的調速范圍內,這種監測方法都可以保證無刷直流電機穩定運行。

圖6 給定轉速3 000r/min時的轉速波形

圖7 給定轉速3 500r/min時的轉速波形

圖8 給定轉速1 000r/min時的轉速波形
圖9給出了在反電動勢法監測轉子位置的情況下給定轉速為1 000r/min時電機的轉速波形。在相同的調速系統中,若采用反電動勢法對轉子位置進行監測,電機在啟動時,為了使電機產生有效的反電動勢,需要增加一啟動電路,這樣便會使調速系統的調速效果變差。從圖9中可以明顯看出,采用反電動勢法時,電機轉速的超調量變大,而且也沒有轉速法位置監測時的抗擾動能力強。

圖9 反電動勢法監測下給定轉速1 000r/min時的轉速波形
4 結束語
對化工驅動系統中常用的無位置傳感器無刷直流電機的轉子監測方法進行了研究,提出利用電機轉速來對轉子位置進行監測的方法。根據電機的轉速,計算出電機轉子的角位移,對角位移進行脫周期運算,使得角位移數值落在一個周期,即[0,2π]范圍內,并根據脫周期后角位移的大小判斷出轉子的位置,最后根據轉子位置來控制無刷直流電機的換相。通過仿真驗證了這種轉子位置監測方法具有較大的調速范圍和很好的抗干擾能力。該方法為無刷直流電機在化工領域更好地應用奠定了基礎,也可指導相關的理論研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
