旋轉控制固定鴨舵的導航初始化與控制算法研究
2014-08-11 11:29:23張衍儒肖練剛張繼生
航天控制 2014年6期
張衍儒 肖練剛 張繼生 田 豐 陳 昌
北京航天自動控制研究所,北京 100854
?
旋轉控制固定鴨舵的導航初始化與控制算法研究
張衍儒 肖練剛 張繼生 田 豐 陳 昌
北京航天自動控制研究所,北京 100854

針對制導迫擊炮彈的固定翼鴨舵導航初始化,設計了基于GPS信息的衰減記憶法擴展卡爾曼濾波算法,用于實時求解固定翼鴨舵的氣動力合成矢量,然后結合固定翼鴨舵的氣動數學模型,設計了固定翼鴨舵的導航初始化算法。并在直流電子負載系統的基礎上設計了鴨舵的旋轉控制算法,通過仿真試驗驗證了依靠GPS提供的位置速度信息和鴨舵滾轉角速度信息可以快速實現固定翼鴨舵的導航初始化,為旋轉控制固定翼鴨舵的工程應用,提供了理論參考。
旋轉控制固定翼鴨舵;導航初始化;直流電子負載系統;控制算法
迫擊炮彈發射和飛行時,由于受到出膛跳角和隨機風影響,不能精確命中目標,如果能采用智能化改造方式,改造現役的迫擊炮彈為精確制導迫擊炮彈,能以較少的經費投入就顯著提高迫擊炮的火力打擊能力。旋轉控制固定翼鴨舵以現役迫擊炮彈的彈體為主體,實現迫擊炮彈的智能化改造。
旋轉控制制導迫擊炮彈由3部分構成[1]:1)改裝的斜切尾翼,用于迫擊炮彈發射后為彈體提供繞彈體縱軸正向旋轉的誘導滾轉力矩;2)標準迫擊炮彈彈體,此部分未進行技術改造,可以應用現役存儲的大量常規迫擊炮彈彈體;3)迫擊炮彈頭部制導模塊,依靠GPS提供的位置速度信息和鴨舵滾轉角速度信息,利用導航衛星的信息通過旋轉控制固定翼鴨舵實現迫擊炮彈的制導控制。

圖1 旋轉控制制導迫擊炮彈結構示意圖
迫擊炮彈頭部制導模塊[2]包含旋轉控制固定翼鴨舵、永磁發電機、可變負載系統、GPS模塊和控制處理器等模塊。頭部制導模塊采用旋轉控制固定翼鴨舵進行彈體姿態控制,旋轉控制固定翼鴨舵由4片固定舵角的舵片組成,其中1對旋轉鴨式舵的偏轉方向是相反的,在彈體飛行時會產生1個繞彈體縱軸反向的氣動滾轉力矩;另1對控制舵片,偏轉方向相同,彈體飛行時會產生氣動力用于彈體姿態控制。
圖2 旋轉控制固定翼鴨舵結構示意圖
鴨式舵和它們下面的圓臺形外殼,是可以旋轉的,而且外殼內有一圈永磁體,相當于永磁發電機的轉子,里面套著的是“引信套”。引信套的后部是標準螺紋,能和普通引信一樣,旋接到彈體頂端,因此在迫擊炮彈發射后,這個引信套將跟著彈體一起繞彈體縱軸正向方向旋轉。標準螺紋的前面,有一圈轉子線圈,控制器等模塊被固定在轉子線圈的內部,可以把轉子線圈看做永磁發電機的定子。迫擊炮彈飛行時,轉子的鴨式舵部件在差動式偏斜舵片的作用下,通過軸承會繞彈體縱軸反向旋轉,而定子的引信套會隨彈體繞彈體縱軸正向旋轉,其中斜切尾翼提供了繞彈體縱軸正向旋轉時需要的滾轉誘導力矩。由于轉子與定子做反向運動,永磁發電機會產生電壓與電流。通過可變負載系統調節永磁發電機的電樞電流,當電樞電流降低時,電磁轉矩相應降低,由于氣動滾轉力距影響,旋轉控制固定翼鴨舵會繞彈體縱軸反向增速;反之,當增大電樞電流時,旋轉控制固定翼鴨舵的轉速會降低。通過實時并連續調整電樞電流,就能控制固定翼鴨舵的轉速,使其旋轉到需要的角度,此過程叫做“消旋”。消旋完成后,可以利用另一對同向舵片改變彈體的攻角,從而實現旋轉控制制導迫擊炮彈的制導控制。
文中探索并研究了適用于旋轉控制固定舵的導航初始化與控制算法。設計了基于GPS位置信息的衰減記憶法擴展卡爾曼濾波算法,用于實時求解固定翼鴨舵的氣動力合成矢量信息。利用求解的氣動力合成矢量和固定翼鴨舵的氣動數學模型,設計了固定翼鴨舵的初始化算法。采用直流電子負載系統作為迫擊炮彈頭部制導模塊的可變負載系統,并設計相應的初始化控制算法用于旋轉控制固定翼鴨舵的初始化控制。
1 固定翼鴨舵氣動力合成矢量求取算法
文中在導航坐標系中研究炮彈運動的受控情況,導航系的原點在發射點,OX軸指向飛行方向,OY軸垂直向上,OZ軸與前二軸構成坐標系,根據彈道方程,得出[3]:
(1)
式中,V,θ,ψV分別為導航坐標系下彈藥質心速度、彈道傾角和彈道偏航角;x,y,z為導航系下質心位置坐標;g為重力加速度、T為采樣時間;nx,ny,nz為彈道坐標系下炮彈彈體過載;ui為零均值高斯白噪聲。
運用參數辨識的衰減記憶法擴展卡爾曼濾波,得到如下濾波方程:
1) 取狀態變量
X(k)=
[V(k)θ(k)ψV(k)x(k)y(k)z(k)]
(2)
2) 觀測方程為:
Z(k)=H(k)*X(k)+N(k)
(3)

(4)
3) 確定濾波初值X(0/0),P(0/0):
P(0/0)=var(X(0/0))
(5)
4) 狀態預測:

(6)

(7)

(8)
5)預測方差:
P(k/k-1)=Φ(k,k-1)·[P(k-1/k-1)·s]*
ΦT(k,k-1)+Q(k-1)
(9)
式中,s為衰減因子,且s>1。
由于s>1,增大了P(k/k-1),相應增大了K(k),這意味著采用衰減記憶法濾波算法,對新量測值的利用權重比用基本卡爾曼濾波方程時大。
6)濾波增益:
K(k)=P(k/k-1)·HT(k)*
[H(k)·P(k/k-1)·HT(k)+R(k)]-1
(10)
7)狀態濾波:

(11)
8)濾波誤差:
P(k/k)=[I-K(k)·H(k)]·P(k/k-1)
(12)
9)氣動力分量求取:
(13)
固定翼鴨舵的氣動力合成矢量可以近似為mg·ny(k)與mg·nz(k)的合成矢量。
2 固定翼鴨舵的導航初始化算法
導航初始化時,彈體的攻角與側滑角近似為0,旋轉控制固定翼鴨舵[4]在彈體橫軸方向的氣動力矢量Fc,可近似為:
(14)
δz為固定翼鴨舵的同向偏轉舵角。
固定翼鴨舵的氣動力合成矢量Fc可以近似為:
(15)
由式(15)和(16)可近似得到:
(16)
當固定翼鴨舵旋轉過0°或±180°時,實時估計的滾轉角位移φN存在明顯正負變化的現象,設估算角位移正負變化時刻為導航初始化結束時刻。
3 可變負載設計和初始化控制算法
1)可變負載設計
采用直流電子負載[5]系統作為旋轉控制固定翼鴨舵的可變負載系統,直流電子負載簡易電路圖如圖3所示。

圖3 直流電子負載簡易電路圖
圖3中,運放 OP27通過控制MOS管漏極的導通量,即可獲得穩定的控制電流。其穩定值由運放OP27的正端電壓值與采樣電阻R1阻值之比決定。當有OP27正端電壓值信號到來時,如果采樣電阻R1上的電壓小于正端電壓值,即OP27的反相輸入端電壓小于同相輸入端的電壓,則OP27的輸出加大,使得MOS管加大導通,從而為采樣電阻補流。若采樣電阻上的電壓大于恒流信號,即OP27的同向輸入端電壓小于反向輸入端電壓,則OP27減小輸出,也就降低了采樣電阻上的電流。
2)初始化控制算法
旋轉控制固定翼鴨舵初始化時,需滿足2個條件:1)滿足α與βM近似為0的假設條件;2)通過GPS求取的固定翼鴨舵氣動力合成矢量Fc方向準確。
為了滿足第1個限制條件,需要鴨舵以額定轉速運動,從而實現旋轉控制制導迫擊炮彈的雙圓運動[6]。為了滿足第2限制條件,需要鴨舵的滾轉角位移在旋轉過0°或±180°時進行導航初始化賦值過程。


(17)

由式(18)可得直流電子負載的正端命令電壓值UCMD_DA為:
(18)
4 仿真試驗與數據分析
導航初始化時攻角α與側滑角β變化如圖4所示。
圖4 導航初始化時雙圓變化曲線
由圖4可知攻角α與側滑角β模值逐漸縮小,最終收斂到±2°以內,滿足旋轉控制制導迫擊炮彈作雙圓運動的假設條件。
導航初始化時直流電子負載輸出命令電壓值UCMD_DA、固定翼鴨舵受到的力矩與角速度變化曲線如圖5所示。
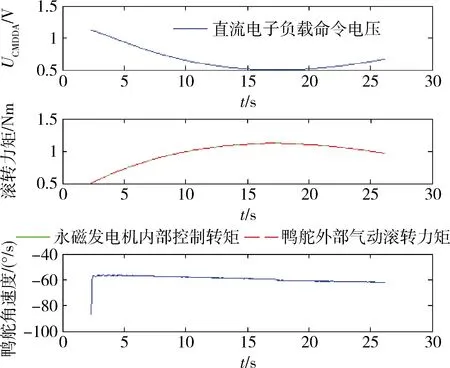
圖5 導航初始化時控制參數變化曲線
由圖5可知直流電子負載可以作為迫擊炮彈頭部制導模塊的可變負載系統使用,文中設計的初始化控制算法能實現旋轉控制制導迫擊炮彈的初始化控制。
導航初始化過程中,氣動力分量(nx,ny,nz)原始數據和卡爾曼濾波(EKF)后數據對比圖如圖6所示。

圖6 求取固定翼鴨舵氣動力合成矢量對比圖
由圖6可看出,采用基于GPS位置信息的衰減記憶法擴展卡爾曼濾波算法,可以降低彈道擾動對固定翼鴨舵氣動力合成矢量求取過程的影響,提高固定翼鴨舵氣動力合成矢量的求取精度。
采用滾轉角位移估算算法求取的估算位移與真實角位移的對比圖如圖7所示。

圖7 固定翼鴨舵角位移估計值與真實值對比圖
由圖7可知,鴨舵的滾轉角位移在旋轉過0°或±180°時,采用估算算法求取的固定翼鴨舵角位移會產生正負上的跳變,通過此種現象即可實現固定翼鴨舵的角位移初始化。當位移估計值從正跳到負時,初始化角位移為0°;當角位移估計值從負跳到正時,初始化角位移為±180°,因此設定估算角位移正負變化時刻為導航初始化結束時刻。
圖8為采用導航初始化后鴨舵角位移的變化與真實鴨舵角位移變化的對比圖,圖中滾轉角位移存在5.52°的誤差,導航初始化結束時間為5.1s,滿足控制指標的實際要求。
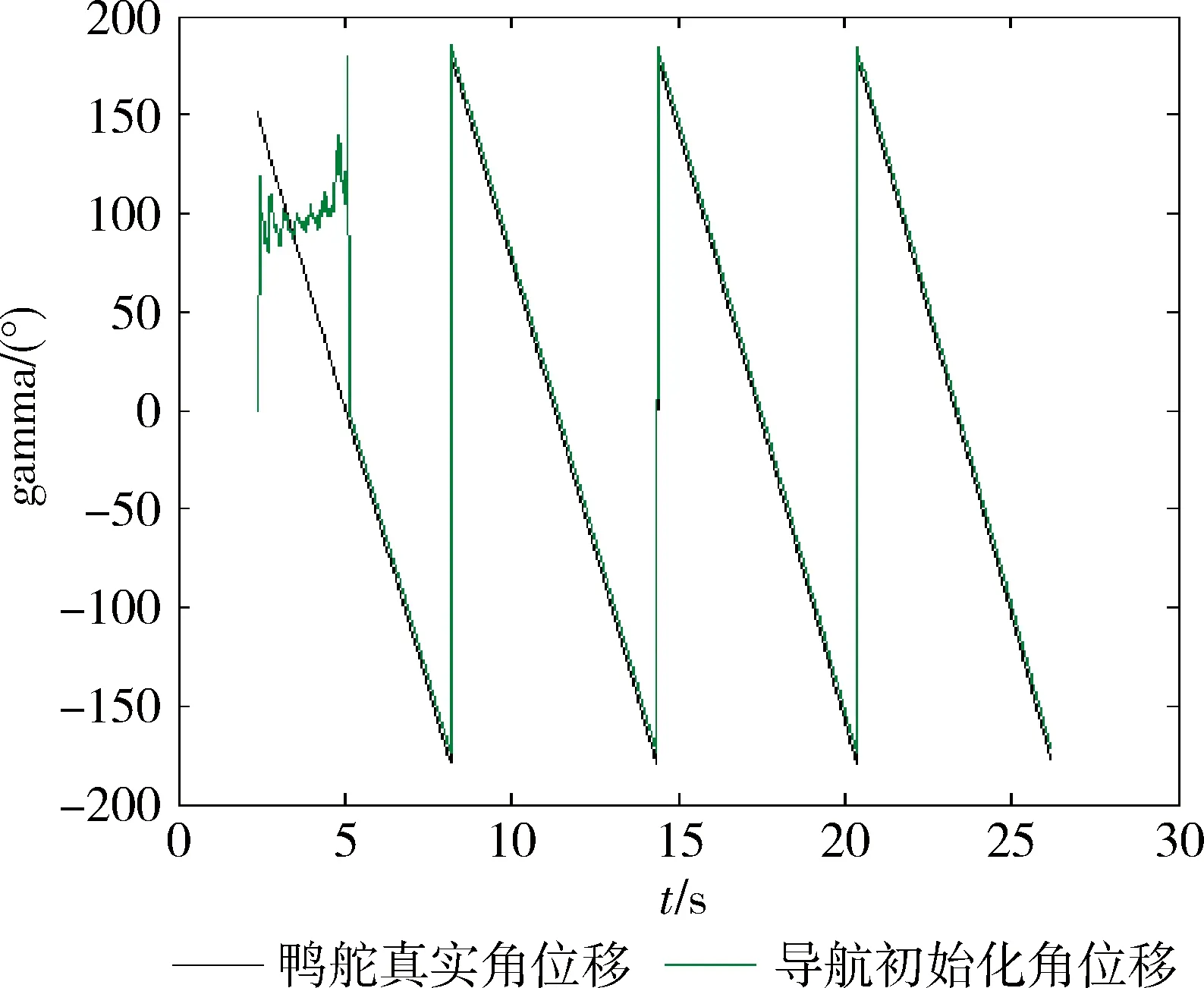
圖8 固定翼鴨舵角位移導航初始化過程
5 結論
通過直流電子負載系統實現旋轉控制固定翼鴨舵的旋轉控制,利用固定翼鴨舵氣動力合成矢量的變化規律,通過GPS信息完成固定翼鴨舵的導航初始化。導航初始化過程中僅僅采用GPS信息和鴨舵滾轉角速度信息,消除了對其它傳感器數據的依賴性,降低了制導模塊的制造成本,為旋轉控制固定翼鴨舵的工程應用,提供了理論參考。
[1] Kelly Hanink. Mortar Guidance Kit (MGK)[R]. America: 2010 Joint Armaments Conference, 2010.
[2] John A.Clancy. Fixed canard 2-D Guidance of Artillery Projectiles, US6981672B2[P]. 2006- 1- 3.
[3] 石章松,劉忠等.目標跟蹤與數據融合理論及方法[M].長沙:國防工業出版社,2010:138- 140.(Shi ZhangShong, Liu Zhong. Method and Theory of Target Tracking and Data Fusion[M]. Beijing: National Defence Industry Press, 2010: 138- 140.)
[4] Philippe Wernert. Stability Analysis for Canard Guided Dual- spin Stabilized Projectiles[C].AIAA. Proceedings of AIAA Atmospheric Flight Mechanics Conference. Chicago: AIAA, 2009. 1- 24.
[5] 陳喻,等.簡易直流電子負載設計及測試[J].電腦知識與技術,2012,8(34): 8293- 8297.(Chen Yu. A Simple DC Electronic Load[J].Computer Knowledge and Technology, 2012,8(34): 8293- 8297.)
[6] 韓子鵬,等.彈箭外彈道學[M].北京: 北京理工大學出版社,2008:194- 196.(Han Zipeng. Exterior Ballistics of Rockets and Missile [M]. Beijing: Beijing Institute of Technology Press, 2008: 194- 196.)
TheNavigaionInitializationandControlAlgorithmofRollControlFixedCanards
ZHANG Yanru XIAO Liangang ZHANG Jisheng TIAN Feng CHEN Chang
Beijing Aerospace Automatic Control Institute, Beijing 100854,China
Whenrollcontrolguidedmunitionsarelaunched,therollangleofcanardsmaynotbeinitializedunderhighimpact.Thereforethenavigationinitializationofrollcontrolfixedcanardsmustbefinishedwhenthemunitionsarestableinflight.Theattenuationmemory-extendedKalmanfilteralgorithmbasedonGPSinformationisdesignedtosolvethereal-timeaerodynamicvectoroffixedcanards,andthentheaerodynamicmathematicalmodeloffixedcanardsiscombinedtodesignreal-timeestimationalgorithmforcanardsrollangular.Inthesimulationexperiment,theDCelectronicloadsystemisusedtocontrolcanardsrotation.TheexperimentalresultsshowthatthenavigationinitializationoffixedcanardscanbefinishedonlybyGPSinformationandcanardrollrate,andtheinitializationalgorithmissuitableforengineeringapplication.
Rollcontrolfixedcanards;Navigationinitialization; DCelectronicloadsystem;Controlalgorithm
2014- 05- 07
張衍儒(1985-),男,哈爾濱人,博士研究生,主要研究方向為制導彈藥控制系統綜合;肖練剛(1973-),男, 四川資中人,博士,研究員,主要研究方向為導航、制導與控制;張繼生(1980-),男,河北人,工程師,主要研究方向為控制系統綜合;田豐(1985-),男,江蘇人,工程師,主要研究方向為控制系統綜合;陳昌(1983-),男,河北人,工程師,主要研究方向為控制系統綜合。
TJ412.+1
: A
1006- 3242(2014)06- 0034- 06
