在防空導彈控制系統中使用模糊監控調節器問題的探討
2014-08-11 11:29:36蘇曉丹
航天控制 2014年6期
關鍵詞:智能
蘇曉丹
海軍駐航天科工集團二院軍代表室,北京100854
?
在防空導彈控制系統中使用模糊監控調節器問題的探討
蘇曉丹
海軍駐航天科工集團二院軍代表室,北京100854

介紹了現代空襲兵器戰術技術性能改進對防空導彈制導控制系統形成的新需求,分析了現有制導控制系統在抗擊高機動飛行器時面臨的困難,探討了在防空導彈控制系統中使用模糊監控調節器的問題。
防空導彈;控制系統;智能控制;模糊監控調節器
防空導彈主要用于抗擊飛機、巡航導彈、戰役——戰術“地-地”導彈、各種無人機、制導炸彈等空襲兵器。采用最新的科學技術成果,使得這些空襲兵器的戰術技術性能不斷改進并能研制出超機動飛行器。第五代戰斗機F-22、F-35、T-50和某些第三代戰斗機蘇-35、蘇-37、 F-15、 F-16 、F-18A、米格-29、蘇-27以及它們的改型,都擁有發達的機翼機構,升力、側力直接控制結構,高性能的推力矢量控制發動機,從而使它們擁有超機動性能,能完成高難度的空中機動,如俯仰平面內的360°轉彎(“福勞洛夫酒杯”)、迎角達150°的“眼鏡蛇”機動、在空間懸停幾秒的“鐘”等模式。
飛行器機動性能的實質性改進使它們獲得了智能機動的可能性,能夠明顯擴大武器的使用區域,減少進入防空兵器攻擊區的時間并提高自身的安全性,其中包括完成更有效的躲避有控殺傷的機動。
當飛行器完成有針對性的機動時,會出現距離、速度和角坐標的三階或者是更高階的導數,會導致跟蹤中斷。由于擴大了被估計的狀態矢量坐標的范圍,飛行器的超機動性對跟蹤它們的“面-空”導彈彈上制導系統的精度、快速性和穩定性提出了更苛刻的要求。如果空中目標在到相遇點前的2~4秒內以最大的加速度Wmj開始機動,在這種情況下是最有效的,這時能達到最大的防空導彈脫靶量,在這種脫靶量下戰斗部引爆的概率實際上等于0[1]。上述情況對防空導彈制導控制系統的戰技性能提出了新的需求。
1 問題的提出
當前,在目標機動、火力對抗、使用干擾和誘餌等不可監測的外部軌跡和信息作用不確定性以及導彈自身運動動態參數變化的條件下,防空導彈的控制系統還不具有自適應的工作性質。眾所周知,控制系統的自適應程度應該既保證理想條件下的運行,也保證在各種干擾和破壞情況下的運行。
有一系列因素使對變化條件自適應的控制系統的綜合問題變得非常復雜。1),未知的軌跡和干擾作用影響以及防空導彈參數的不確定性,不可能直接采用相應的控制補償,這會破壞匹配條件;2) 當描述防空導彈飛行動力學的微分方程組階數相對較高時,想直接測量狀態矢量的所有坐標時就會遇到很大困難。
末制導系統品質的最重要的指標是其精度和工作的穩定性,這些指標與許多因素有關,其中包括控制系統的動態特性、擾動作用和發射導彈時刻的起始條件和目標的運動規律等。
近程末制導防空導彈(達5km)軌跡控制中使用的信息是導彈與目標的相對運動參數,這些參數的大小與目標機動有關,控制規律如下:
(1)
到防空導彈發射之前,通過指令生成裝置的傳遞系數的變化,實現KK1和KK2的選擇(例如,選擇“追蹤”或者是“迎面”射擊狀態),因此,若空中目標突然實現水平面內的180°轉彎飛行時,這類導彈的飛行控制系統就不具備對射擊條件變化的自適應性質。在不同階段回路的傳遞系數可以相差幾倍,這會導致末制導動態特性變差,其后果是防空導彈制導品質變差最終導致降低射擊效能。
因此,產生了在防空導彈本體上設置調節器裝置的設想,以保證在不確定條件下特別是在目標機動時導彈的制導。
對這一范圍內研究成果的分析表明,在隨動式測量儀器中適宜引入專用的裝置(算法),以發現目標機動和根據實際情況修正(自適應)控制系統的參數或結構。
在以卡爾曼濾波為基礎建立的最優測量儀器中,特別是在角度和距離跟蹤濾波器中,作為機動開始的探測器和濾波器參數修正裝置,可以使用偏差探測器、誤差校正器中的附加的控制修正調節器。
例如,在射程達40km的中程末制導防空導彈中,用專用的彈上測量儀器,通過測量和估計包含在控制規律中的運動學參數,達到控制系統對變化的制導條件的自適應性。但是在近程防空導彈上,由于質量尺寸指標的明顯限制,要完全實現上述想法是不可能的。

還有一系列限制最優濾波器在不確定性條件下使用的情況:1)誤差放大系數是對完全確定的先驗統計資料計算的,在測量儀器運行條件變化的過程中它們的值將與最優值有差別;2)狀態矢量維數對卡爾曼濾波器的穩定性與發散性的影響是矛盾的,一方面,為提高模型對濾波器實際工作條件的符合精度而增加維數,會提高穩定性和降低估值發散的趨勢;另一方面,這樣的模型更加依賴具體的工作條件且不具備對這些條件變化的自適應性。對于工作在不確定性條件下的控制系統而言,后者特別不能接受;3)被綜合的濾波器維數的增長導致計算誤差的急劇提高,從而增強了發散的趨勢;4)為了實現最優控制,必須有相對距離rx(t)變化規律的信息,這種信息在導彈本體上或者是通過直接測量而獲取,或者是通過計算得到,而對于質量尺寸指標受限制的防空導彈,例如近程防空導彈,在導彈本體上測量相對距離rx(t)是不可能的[2-4]。
因此,必須研究末制導導彈控制系統綜合的新方法,以克服上述缺點并保證在不確定條件下導彈的制導,有發展前景的是采用智能控制方法。
2 智能導彈簡介
智能導彈在技術層面上要具有下列功能和特性:強自適應性、高識別能力、高靈巧性、高可靠性、使用方便性和高殺傷性。
智能導彈的主要組成包括:智能彈體結構、智能動力系統、智能制導控制系統、智能殺傷系統、智能抗干擾和突防技術、智能指揮控制通信情報和偵察系統、自維護系統和智能化基礎技術。
智能導彈的控制系統應具有惡劣環境自適應能力、智能再規劃能力、智能規避能力、跟蹤高機動目標能力、自修復能力和高彈性彈體控制能力。
智能導彈可對戰場情況進行自動探測、跟蹤,根據獲得的信息進行比較、分析、推理和判斷,達到識別目標、背景和威脅的目的,進而制定出正確的對策、實施必要的機動動作。智能導彈控制主要由智能控制器完成,它接受外部信息,結合導彈自身的測量系統作出智能決策,并對目標自動探測、自動識別和自動捕獲跟蹤,最后摧毀目標[5]。
智能控制包括多級遞階智能控制、基于知識的專家控制、模糊控制、神經控制、基于規則的仿人智能控制、基于模式識別的智能控制和學習控制與自學習控制等[6]。當前,以模糊邏輯方法為基礎的控制系統得到了非常廣泛的推廣應用,模糊控制是未來能夠建立高性能控制系統的智能技術之一。
模糊自動控制系統是包含模糊邏輯推理結構模塊的控制系統(見圖1)。
圖1 模糊推理模塊結構圖
系統的優點有:可以用于復雜的難以用簡單數學模型描述的過程;以語義的形式形成關于控制對象或者是過程的專家知識;逼近傳遞函數的可能性;結構簡單;具有魯棒性或者是自適應性[7]。
模糊推理模塊是非線性環節,這些環節的算子由知識庫決定。模糊推理規則組成知識庫并被模糊邏輯推理算法使用。模糊邏輯推理模塊所處的位置是模糊控制系統的主要分類特征,在該情況下,模糊系統用自身形成的控制信號,或來自模糊系統的信號去控制傳統的控制系統參數。本文介紹并探討在防空導彈末制導系統中采用模糊控制方法的問題[8]。
3 在制導控制系統中使用模糊監控調節器問題
防空導彈末制導回路的典型結構圖如圖2所示。
圖2 防空導彈末制導回路結構圖

在該情況下,模糊邏輯自動控制系統按2級方式構成,在該系統的下面級使用傳統的PID(比例、積分、微分)調節器,而在上面級使用被稱為監控器的模糊系統,這種監控器根據系統中發生的過程對下面級調節器的參數進行修正,賦予下面級自適應或者是魯棒性質(見圖3)。
圖3 具有模糊監控調節器的近程防空導彈的末制導回路示意圖:Kφ1,Kφ2,Kλ,Kp—傳統調節器工作修正系數
圖3中FUZZY1和FUZZY2是模糊監控調節器,它們保證軌跡控制系統對防空導彈末制導條件(目標機動)的自適應;FUZZY3是保證姿態控制系統魯棒性的調節器,特別針對作為對導彈法向加速度Wdd傳遞系數的變化不太敏感的系統。
將具有模糊模型的控制系統理論用于近程防空導彈軌跡控制系統的綜合(圖4),這種導彈采用能實現比例接近法的模糊監控調節器。被綜合的運行算法能夠考慮作為被控對象的防空導彈的非線性與非定常性特點,并保證了沒有結構與參數自適應的高指標控制品質,同時保證了控制算法的硬件與軟件實現的簡單。
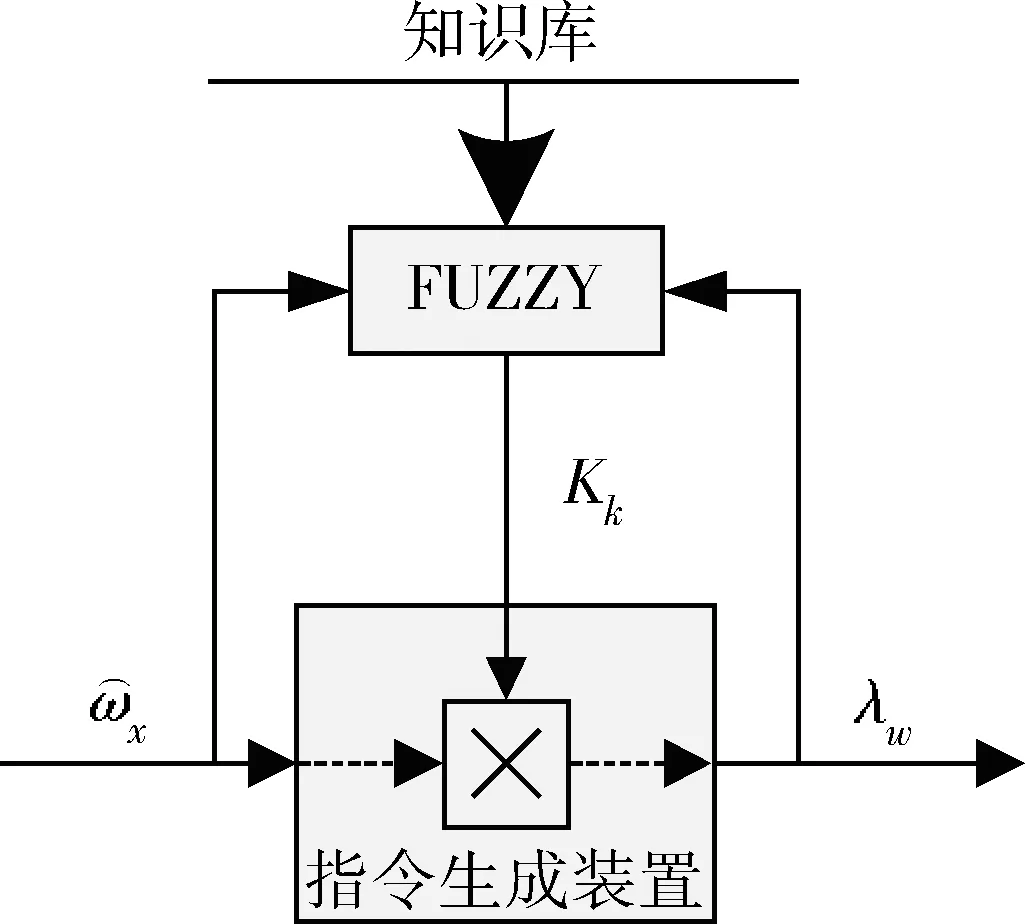
圖4 具有模糊監控調節器的軌跡控制系統結構圖
可以按下面的方法進行軌跡控制系統調節器的綜合:1)確定自尋的防空導彈帶模糊監控調節器的軌跡控制系統的結構;2)進行為構成模糊邏輯推理模塊知識庫(調節器參數的硬件知識)所需要的專家評估;3)形成模糊監控調節器模糊邏輯推理模塊的算法。
專家評估的目的是確定修正系數KK值的變化范圍,在這個范圍內,在變化的導彈與目標接近的條件下,保證所需要的末制導動態指標值。為了在向機動目標制導時保持所需要的導彈的動態性能指標,必須實現制導回路傳遞特性的修正,特別是根據來自調節器輸出端的信息,靠自動改變軌跡控制系統指令生成裝置的傳遞系數來修正,這種調節器根據某個被估計參數的變化來監測目標的運動特點。
因此,專家評估的任務將是:1)確定信息參數的形式,利用這種形式可以測出在機動過程中目標運動特點變化的時刻;2)確定傳遞系數的值,保證在機動過程中目標運動特點變化時所需要的末制導動態指標;3)確定指令生成裝置修正系數變化對監控機動目標運動特點的軌跡參數變化的運行依賴關系。


4 結論
由上面的討論可以得出,防空導彈末制導系統可能在以下條件下工作:1)目標完成規避機動;2)不可能直接測量目標速度矢量及防空導彈自身運動參數所有坐標的情況;而自適應控制系統能夠在理想的條件下,也可以在急劇變化的條件下,以很高的精度將導彈進行目標制導。上述情況給防空導彈自適應控制系統的綜合形成了一定的困難。在近程防空導彈上,由于受質量尺寸指標的限制,難以安裝制導所需要的能測量導彈與目標相對運動參數及其高階導數的傳感器,對于這類導彈來說,解決問題的途徑之一是使用具有模糊監控調節器的控制系統。
[1] АИКанащенков ВМКорчагин Сверхманёвренность иборто выерадиолокационн ыесистемы Радиотехн ика 2002(5).
[2] 周慧鐘,等.有翼導彈飛行動力學.航空專業教材編審組.
[3] 防空導彈武器制導控制系統設計[M].宇航出版社,.
[4] 徐南榮,王漢清.導彈制導系統.航空專業教材編審組,1984.
[5] 夏國洪,王東進,等.智能導彈[M].中國宇航出版社,2008,3.
[6] 李士勇.模糊控制神經控制和智能控制論[M].哈爾濱工業大學出版社,1998,9.
[7] 章衛國,楊向忠.模糊控制理論與應用[M].西北工業大學出版社,2001,2.
[8] КАВоробьёв Системыу правлениязенитныху правляе мыхракетсп рименениемнечётк огосупервизор ного регул ирования Автоматиз ацияисовременные технология
DiscussiononUsingFuzzyMonitoringRegulatorinAirDefenseMissileControlSystem
SU Xiaodan
Military Representative Office of Navy in the Second Research of CASIC, Beijing 100854, China
Regardingtheimprovementsofweapontacticalandtechnicalperformanceinmodernairattack,thenewrequirementsofguidanceandcontrolsystemforairdefensemissileareintroduced.Thenthedifficultiesofguidanceandcontrolsystemduringantagonizinghigh-maneuverablevehiclesareanalyzed,andfinallytheproblemofusingfuzzymonitoringregulatorinairdefensemissilecontrolsystemisproposed.
Airdefensemissile;Controlsystem;Intelligentcontrol;Fuzzymonitoring
2014- 10- 08
蘇曉丹(1966-),女,吉林通化人,碩士,高級工程師,主要從事飛行器總體設計、制導控制、作戰使用和質量監督研究。
TP316.2
: A
1006- 3242(2014)06- 0040- 04
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
