基于腱驅動的空間多指靈巧手的位置/腱張力混合控制*
2014-08-11 11:29:34馮敦超王小濤韓亮亮
航天控制 2014年6期
馮敦超 王小濤 韓亮亮
1.南京航空航天大學,南京210016 2.上海市空間飛行器機構重點實驗室,上海 201108
?
基于腱驅動的空間多指靈巧手的位置/腱張力混合控制*
馮敦超1, 2王小濤1韓亮亮2
1.南京航空航天大學,南京210016 2.上海市空間飛行器機構重點實驗室,上海 201108
現有的腱驅動空間多指靈巧手通過對每一根腱施加獨立的張力實現力控制,忽略了腱繩耦合運動的影響。針對“N+1”型腱驅動多指靈巧手系統內腱繩運動和腱張力耦合的問題,采用關節轉矩到腱張力映射的方式解決,同時加入位置控制,構成位置/腱張力混合控制系統,實現腱驅動靈巧手的主動柔順控制。“Matlab+ADAMS”聯合仿真結果驗證了算法的可行性。
空間多指靈巧手;腱驅動;N+1;腱張力;柔順控制
隨著航天技術的飛速發展, 空間飛行器的結構和組成日趨復雜, 性能和技術水平不斷提高, 在這種情況下, 保證空間飛行器在復雜的空間環境中更加持久、穩定地在軌運行,已成為目前空間技術領域亟待解決的重要問題。近幾十年來,各國研究機構進行了一系列地面、空間論證實驗和應用研究, 結果表明空間在軌服務不僅在技術上是可行的, 而且具有巨大的研究、發展空間[1]。而作為在軌服務智能末端執行器的多指靈巧手技術在國內外也得到了蓬勃的發展。多指靈巧手具有多個多關節手指,能夠和人手一樣具有很高的靈巧性、通用性和適應性,采用多指靈巧手作為末端執行器對機器人智能化水平和作業水平的提高具有重要意義。
多指靈巧手的驅動方式分為驅動器內置式和外置式2種,國內研究的靈巧手均采用驅動內置式,代表性的是北航BH985手[2]和哈工大HIT/DLR II手[3],把驅動器和傳動裝置集成在每個手指內部,使得手指體積龐大、笨重,增加了復雜度,不適宜應用在空間在軌服務領域,同時對小體積、大扭矩電機的設計制造提出了嚴格要求。為了應對空間環境防護、降低復雜性和提高可靠性,空間靈巧手系統越來越多的采用外驅式的腱驅動形式,典型的有DLR-I Hand[4],R2手[5-6],DEXHAND[7]等。外置的驅動器可以減小手指體積和重量,這些特性對手指的靈巧性至關重要。由于腱只可以傳遞張力,因此為了獲得完全獨立的自由度控制,必須要保證驅動器的數量多于自由度的個數,與傳統的“2N”配置方式不同,文獻[8]中提出只需要比自由度的數量多1個即可,即“N+1”型腱驅動系統。然而這種方式在減少腱繩數量的同時卻引入了關節位置和腱繩的耦合問題,文獻[9]提出在力矩空間進行力矩分配后再轉到關節空間的方式,解決了腱和關節位置的耦合問題。
為了使多指靈巧手能夠可靠穩定地抓握物體,靈巧手應具有一定的柔順性,目前阻抗控制是主動柔順的一種主要方法,其優點是把力控制和位置控制納入統一的框架,設計簡單,但是難于實現精確的力跟蹤。相對于傳統的齒輪傳動,腱驅動的難點在于設計一個控制器使其能按照期望的位置運動,同時保證腱的張力保持在期望的范圍內。由于腱只能傳遞張力,而且有一定的延遲,因此在控制的過程中一定要避免出現腱的松弛,此時基本的位置加阻抗的控制策略很難實現。本文在Matlab+ADAMS聯合仿真平臺基礎上,研究了位置/腱張力混合控制的方法,目標是保證腱張力在期望的范圍內的同時進行位置控制,以達到柔順控制的目的。
1 系統結構
參考NASA Robonaut 2靈巧手,設計了多指靈巧手的ProE模型如圖1所示,該靈巧手有18個活動關節和12個獨立自由度,分布在5個手指中,整個手在尺寸上與人手類似。本文主要針對圖1中加深顯示的食指的柔順控制進行深入研究。如圖2所示,該手指由基座、側擺、近指節、中指節和遠指節組成,采用“N+1”型腱驅動方式,具有3個獨立自由度。
其中,遠指節通過一個連桿機構與中指節耦合。每個獨立關節裝有霍爾角度傳感器,每一根腱都裝有張力傳感器,并通過一個無刷直流電機驅動,通過滾珠絲杠把旋轉運動轉換為直線運動。
2 位置/腱張力混合控制
具體位置和腱張力混合控制的原理:在自由空間,采用前饋位置PD控制和最小張力混合的控制方法,使關節跟蹤期望軌跡并保證腱張力在期望范圍內;在接觸物體以后的約束空間,采用前饋位置PD控制和完全張力控制的方法使手指以期望的接觸力與物體接觸,實現穩定的精確抓持。
2.1 位置控制
位置控制器的輸入量為:
θe=θd-θb
(1)
其中,θe代表位置偏差,θd代表規劃的關節位置,θb為手指反饋的關節位置。
因該靈巧手采用“N+1”型腱驅動,其位置控制有別于傳統的齒輪傳動結構,4根腱的位置對應3個獨立關節,本文采用幾何建模的方法實現腱位置到關節位置的解算,即在各關節處對腱的運動路徑做幾何簡化,得到每根腱的位置與關節位置的關系。
圖3 腱繩運動狀態簡化圖
圖3所示的連桿由虛線位置轉到實線位置,關節轉動Δθ角,腱繩x3由虛線位置運動到實線位置,關節處對應的腱繩長度由l1變為l2,根據余弦定理可知:
(2)
則,Δx3′=Δl=l2-l1。
同理,得到4根腱的位置到關節位置的轉換方程:
(3)
得到腱位移的Δx(Δθ)后,為了改善位置控制的調節時間,增加系統阻尼,減少超調量,引入1個PD控制器,根據式(2)和(3)最終得到位置控制系統表達式如下:
(4)
2.2 腱張力控制器
在腱驅動靈巧手系統中,腱之間存在耦合,為了避免解耦的麻煩,在關節空間規劃期望的關節力矩,然后轉換成腱空間的張力。
根據手指靜力學特性,事先規劃出指尖接觸力Fd,即可通過雅克比矩陣J反解出使手指指尖在接觸到物體并保持靜態平衡時所需的關節力矩τd。如公式所示:
τd=JTFd
(5)
由于腱只傳遞張力,為了避免腱在運動過程中出現松弛,引入腱張力控制器確保腱張力的正定性。腱張力控制器算法的基礎是n個關節力矩τ和n+1個腱張力f之間的關系,如式(6)所示:
(6)
其中,t表示腱的內部張力;L∈R3×3是由3個獨立關節的半徑組成的對角陣;B表示腱的結構矩陣[10];WT正交于LB的行空間且正定。
系統中腱張力可控的充要條件為P可逆,要求LB行滿秩[11]。根據式(6)得到:
(7)
令P-1=[Aa],則
(8)
設定腱張力取值范圍[fmin,fmax],fmin保證腱始終處于繃緊的狀態,fmax保護腱不超負荷。令Ai和ai分別代表A的行向量和a向量的元素。首先根據fmin確定內部張力t的取值,則有:
fi=Aiτ+ait≥fmin(其中,i=1,2,3,4)
(9)
式(9)經過變換得到式(10),計算得出t的4個值:
(10)
因此,內部張力t取式(10)的最大值即可,如式(11)所示:
t=max(ti) (其中,i=1,2,3,4)
(11)
其次,確保腱張力fi≤fmax,如果出現fi>fmax,則采用比例縮放的方式減小力矩τ分量:
(12)
其中,α為比例縮放因子,且α≤1。
綜合式(5)~(12),可得腱張力分配算法表達如下:
(13)
最終得到腱張力控制器系統表達式如下:
(14)
2.3 單手指位置/腱張力混合控制
因為腱只能傳遞張力,因此單獨的位置控制很難保證腱張力時刻大于0,而且腱本身有一定的柔韌性,對力的傳遞有遲滯性。而腱張力控制器則解決了這一問題,腱張力控制器可以保證腱張力在[fmin,fmax]范圍內,在初始時刻時,給腱繩施加力fi≥fmin,保證腱在初始時刻有預張緊,從而可以忽略腱繩的彈性,使腱繩等效為剛體。
首先根據圖2中所示腱的排列可以得出結構矩陣B,進而得到腱映射矩陣P,如下所示:
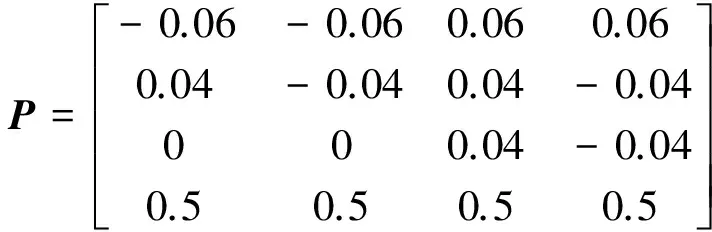
同時,根據任務要求及腱的性能設置腱張力范圍fmin=8N,fmax=200N。
式(4)和(13)相加得到位置/腱張力混合控制系統方程(15):

(15)
最終完整的控制系統框圖如圖4所示。
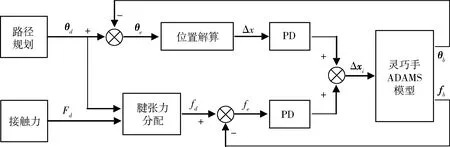
圖4 單指靈巧手位置/腱張力混合控制框圖
3 仿真驗證
為了確定上述位置/腱張力混合控制方法的有效性,在“Matlab+ADAMS”平臺進行了仿真驗證,把單指靈巧手PROE模型文件導入ADAMS里,利用ADAMS/Control組件把Matlab/Simulink和ADAMS模型連接在一起,構成完全非線性的物理模型[12]。
使用圖5所示的階躍信號[0° 45° 90°]作為控制器的關節角度測試信號,設定接觸力的期望值為[10N 0N 0N],根據腱張力分配方法計算出期望的腱張力如圖6所示。
設置仿真時間為3s,得到圖7~9所示的關節位置誤差、腱張力誤差和接觸力大小曲線,從圖中可以看出,0~0.7s單手指在自由空間運動,腱張力從0N逐漸增加到設定的最小張力fmin=8N,同時關節位置保持不變,這一階段稱為腱繩的預張緊;0.7s開始向關節位置輸入階躍信號,從接觸力曲線可以看出在0.8s時手指被障礙物阻擋,進入約束空間,關節位置誤差不再改變,經過0.5s的調節時間,指尖接觸力達到期望值,腱張力誤差也趨于穩定,系統處于穩定狀態;在1.7s時再次向關節位置輸入階躍信號,使手指原路返回到初始關節位置,經過0.5s的調節時間,手指關節角度達到0°,腱張力恒定為fmin。
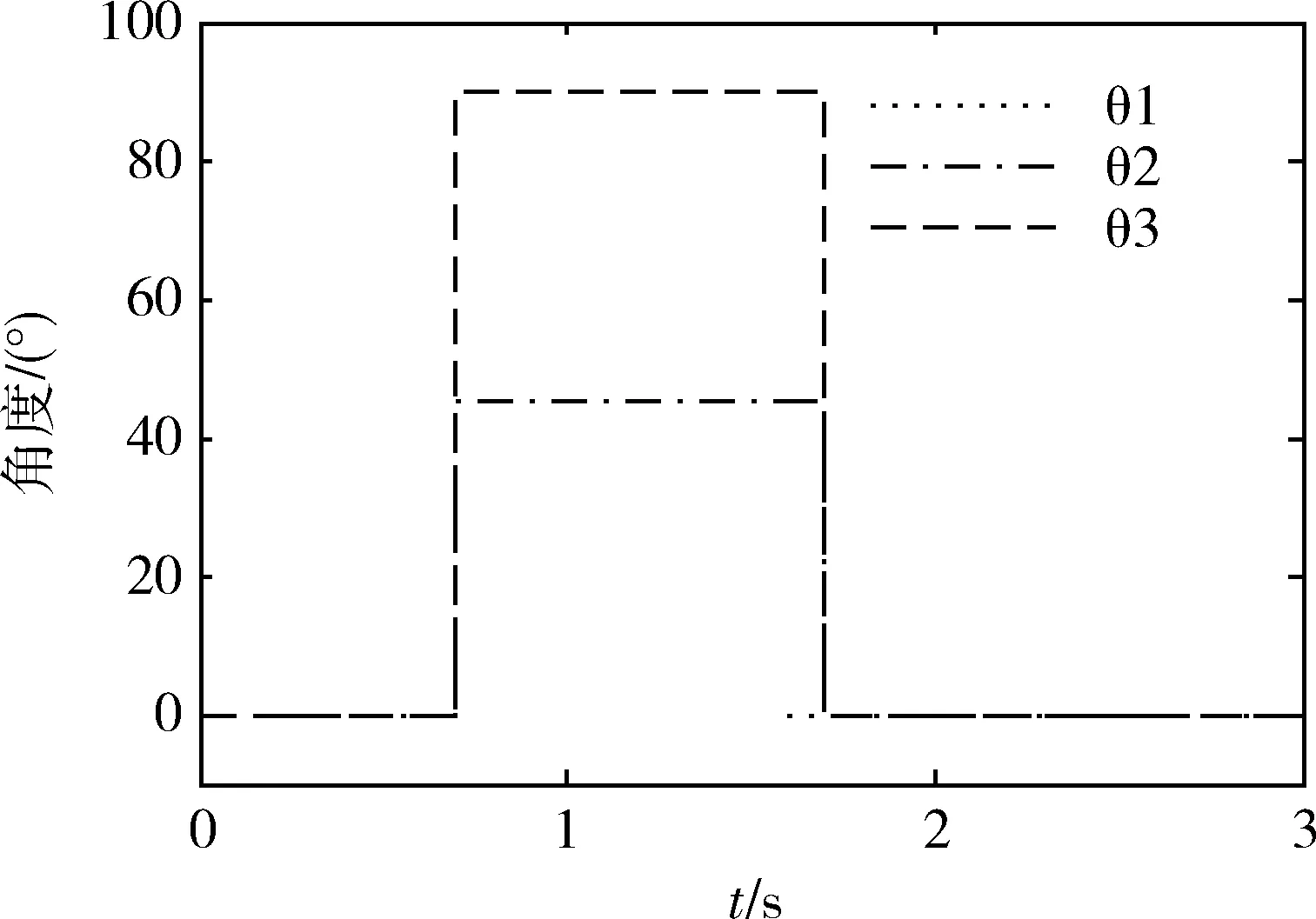
圖5 期望關節角
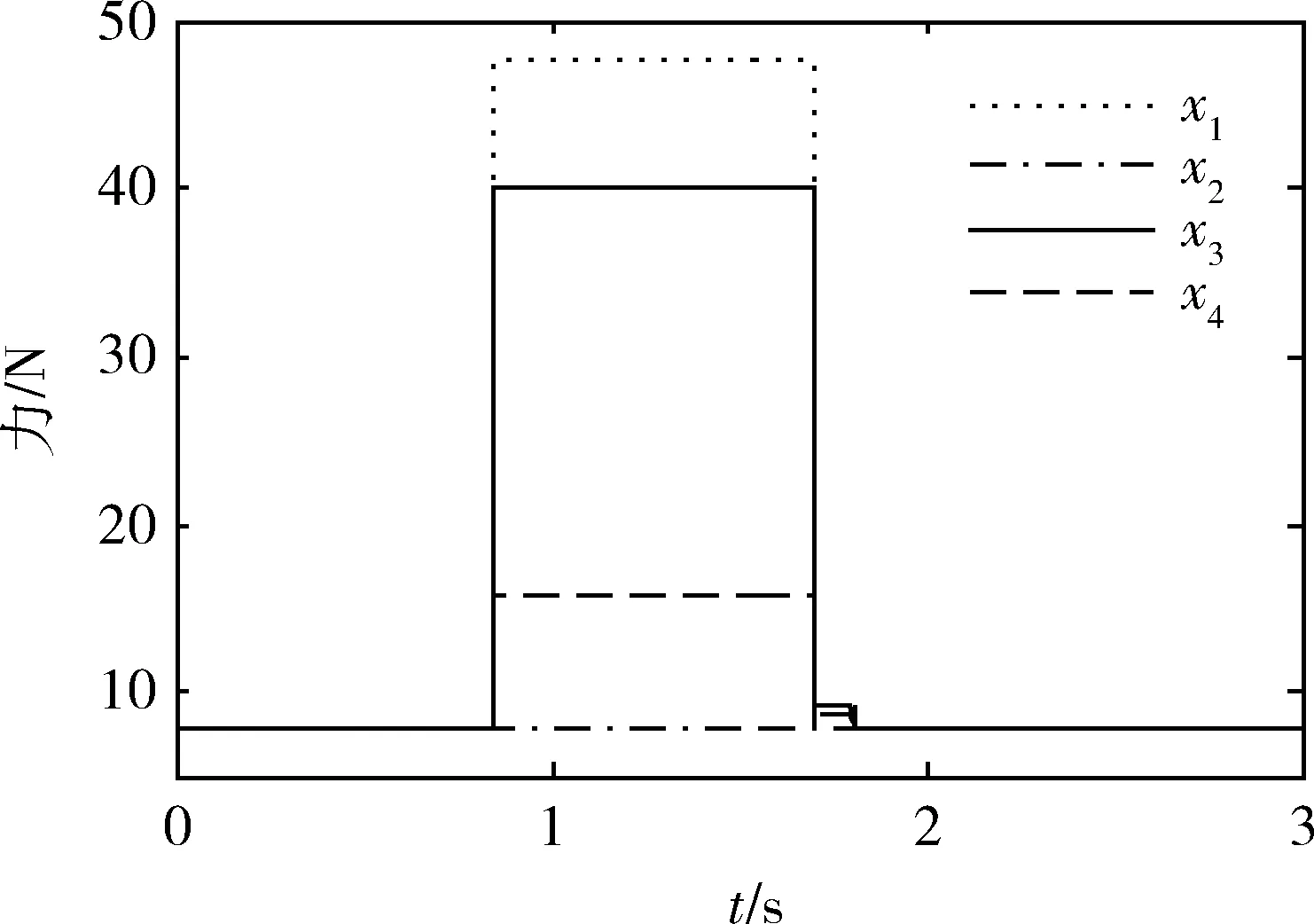
圖6 期望腱張力
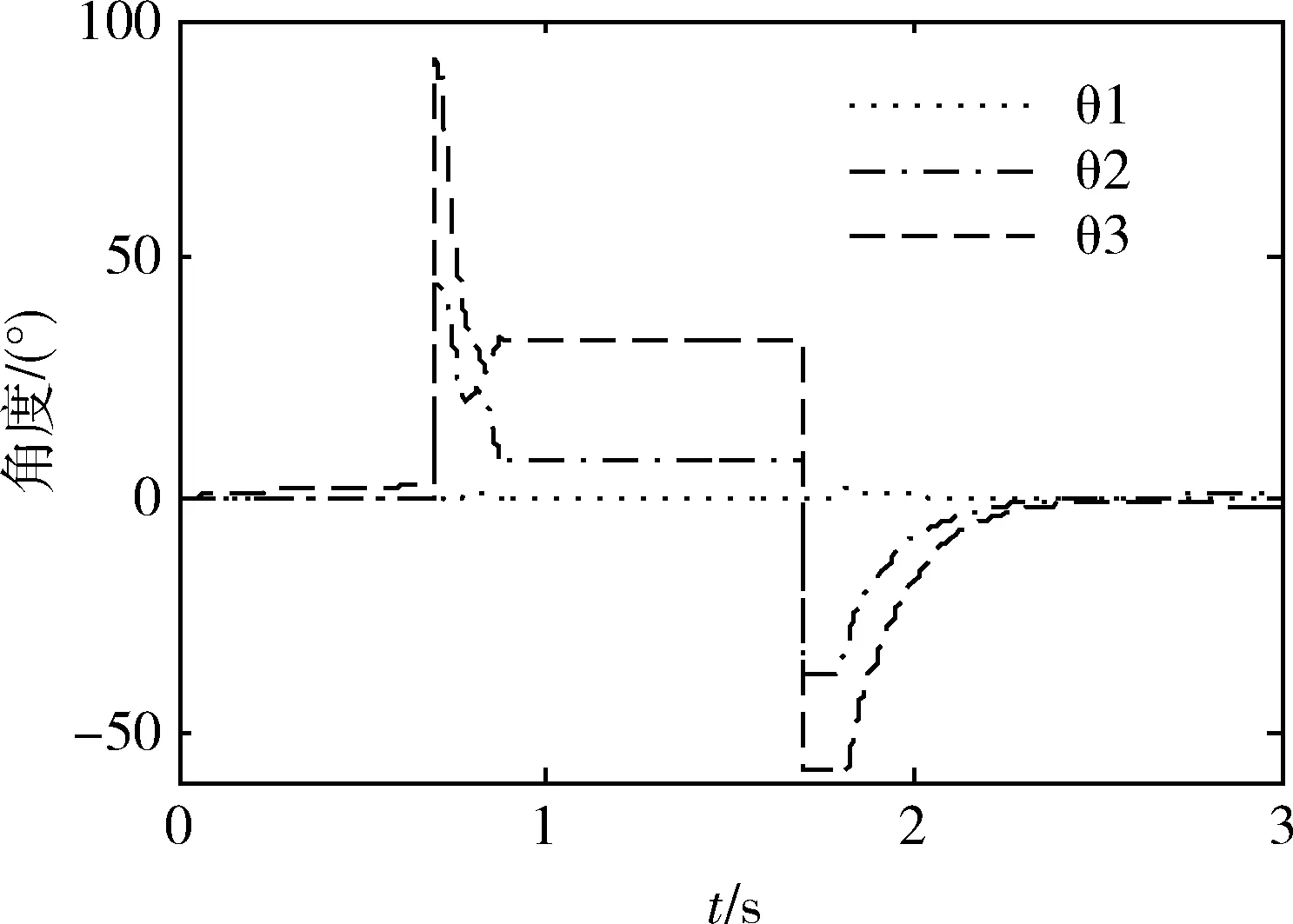
圖7 關節位置誤差
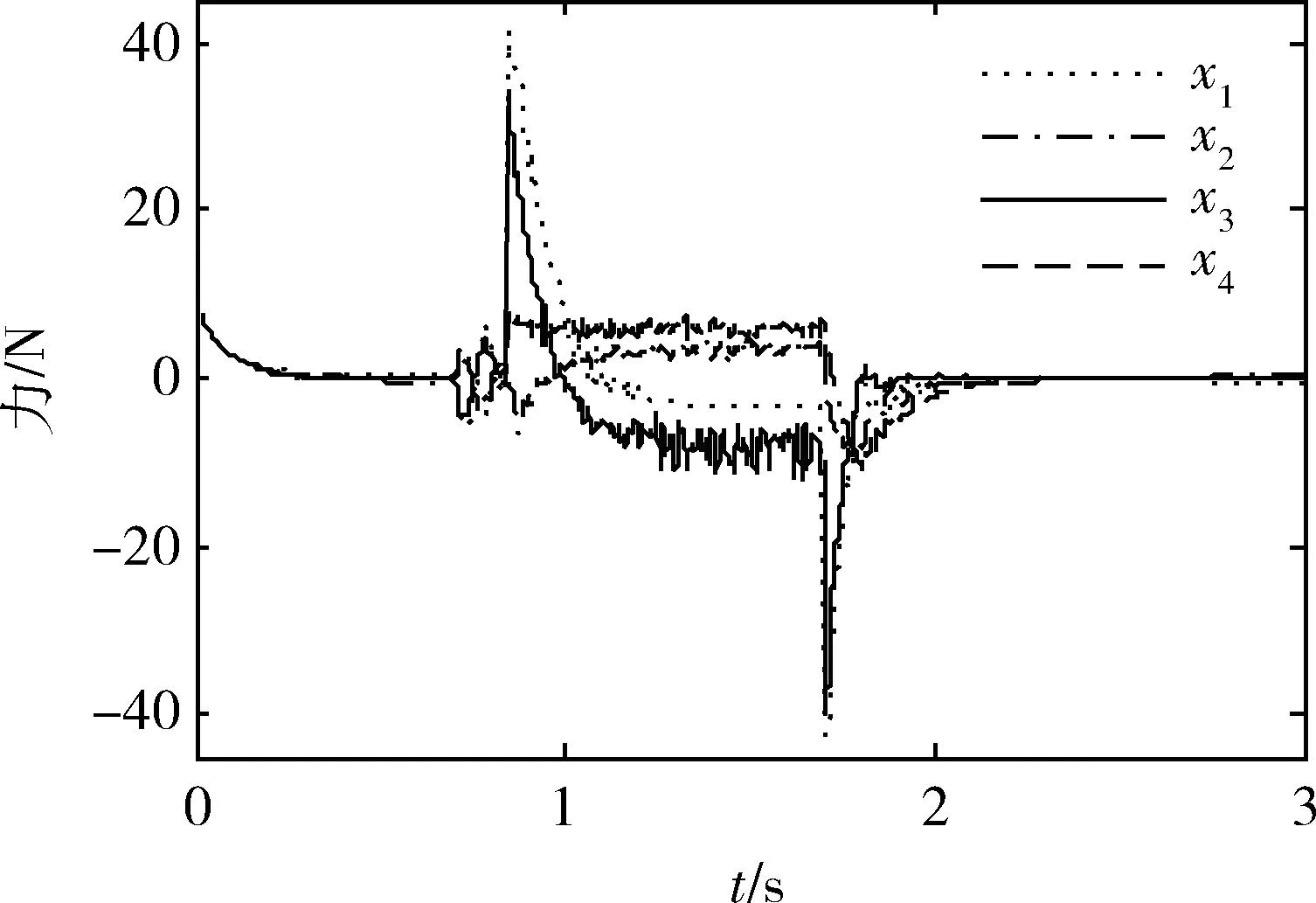
圖8 腱張力誤差
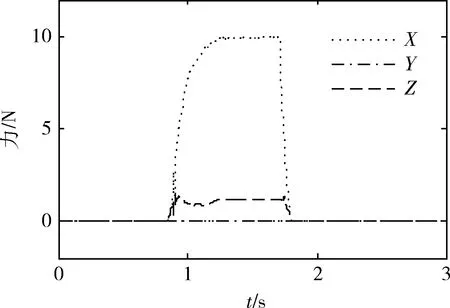
圖9 指尖接觸力
4 結論
為了使基于腱驅動的空間仿人多指靈巧手能夠可靠精確的抓握物體,實現空間在軌操作,本文提出了一種新的關節位置/腱張力控制方法:前饋PD位置控制和腱張力混合控制的方法。較好的實現了單手指關節位置跟蹤和腱張力控制,運用腱張力控制器解決了腱張力到指尖接觸力的轉換,實現靈巧手的柔順控制。同時利用“Matlab+ADAMS”聯合仿真驗證了該方法的可行性,得到了期望的結果。
[1] 崔乃剛,王平,郭繼峰,等.空間在軌服務技術發展宗述[J].宇航學報,2007,28(4):805- 811.(CUI Naigang,WANG Ping,GUO Jifeng,et al.A Review of On- Orbit Servicing[J].Journal of Astronautics,2007, 28(4):805- 811.)
[2] 李久振,劉博,張玉茹.北航 BH- 985 靈巧手結構設計[C].全國印刷, 包裝機械凸輪, 連桿機構學術研討會 (第 6 屆全國凸輪機構學術年會)論文集, 2005: 140- 142. (LI Jiuzhen, LIU Bo, ZHANG Yu- ru. Structure Design of BH- 985 Dexterous Hand[C]. National Printing, Packaging Machinery Cam Linkage Symposium (6th Annual Conference of the National Cam) Proceedings, 2005:140- 142.)
[3] 劉伊威,金明河,樊紹巍,等.五指仿人機器人靈巧手 DLR/HIT Hand Ⅱ[J].機械工程學報, 2009, (11):10- 17.(LIU Yiwei,JIN Minghe,FAN Shaowei,et al.Five- finger Dextrous Robot Hand DLR/HIT Hand II[J].Chinese Journal of Mechanical Engineering,2009,(11):10- 17.)
[4] Hirzinger G,Fischer M,Brunner B,et al. Advances in Robotics: the DLR Experience[J].The International Journal of Robotics Research,1999,18(11):1064- 1087.
[5] Diftler M A,Mehling J S,Abdallah M E, et al.Robonaut 2- the First Humanoid Robot in Space[C].Robotics and Automation (ICRA), 2011 IEEE International Conference on. IEEE, Shanghai, 2011: 2178- 2183.
[6] Bridgwater L B, Ihrke C A,Diftler M A,et al. The Robonaut 2 Hand- Designed to Do Work with Tools[C]. Robotics and Automation (ICRA), 2012 IEEE International Conference on IEEE,Saint Paul,MN, 2012: 3425- 3430.
[7] Chalon M,Wedler A,Baumann A,et al.Dexhand: a Space Qualified Multi- fingered Robotic Hand[C]. Robotics and Automation (ICRA), 2011 IEEE International Conference on IEEE, Shanghai, 2011: 2204- 2210.
[8] Murray R M, Li Z, Sastry S S, et al. A Mathematical Introduction to Robotic Manipulation[M]. Boca Raton, FL: CRC press, 1994: 229- 233.
[9] Abdallah M E, Platt R, Wampler C W.Decoupled Torque Control of Tendon- driven Fingers with Tension Management[J].The International Journal of Robotics Research,2013,32(2): 247- 258.
[10] Lee J J, Tsai L W. The Structural Synthesis of Tendon- Driven Manipulators Having Pseudo- Triangular Matrix [J].The International Journal of Robotics Research, 1991,10(3):255- 262.
[11] Abdallah M E,Platt R,Wampler C W, et al.Applied Joint- space Torque and Stiffness Control of Tendon- driven Fingers[C].Humanoid Robots (Humanoids), 2010 10th IEEE- RAS International Conference on.IEEE, Nashville,TN,USA, 2010: 74- 79.
[12] 范成建, 熊光明, 周明飛.虛擬樣機軟件 MSC. ADAMS 應用與提高[M].機械工業出版社, 2006: 214- 243.
PositionandTendon-TensionHybridControlofTendon-DrivenBasedonSpaceMulti-FingeredDexterousHand
FENG Dunchao1,2WANG Xiaotao1HAN Liangliang2
1.College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China 2.Shanghai Key Laboratory of Spacecraft Mechanism,Shanghai 201108,China
Theforcecontrolisappliedtoexistingtendon-drivenspacemulti-fingereddexteroushandbyusingindependenttensiononeachtendon,ignoringtheeffectsoftendonropecouplingmovement.Duetothecouplingproblembetweentendondisplacementsandtendontensioninthetendon-drivenmulti-fingereddexteroushandsystem,itcanbesolvedbythemappingofjointtorquetothetendontension,simultaneouslyaddingthepositioncontrol,tomaketheposition/tendontensioncontrolsystemwhichrealizestheactivecompliancecontroloftendon-drivendexteroushand.ThefeasibilityofthealgorithmisverifiedbytheunitedsimulationofMatlab+ADAMS.
Spacemulti-fingereddexteroushand;Tendon-driven;N+1;Tendontension;Compliancecontrol
*上海航天科技創新基金資助項目(SAST201318);上海市空間飛行器機構重點實驗室資助項目(06DZ22105)
2014- 05- 05
馮敦超(1989-),男,江蘇徐州人,碩士研究生,主要研究方向為腱驅動空間多指靈巧手控制技術;王小濤(1976-),男,山東濰坊人,博士,副教授,主要研究方向為航天機構驅動控制、機器視覺算法及其高速并行實現;韓亮亮(1987-),男,甘肅莊浪人,碩士,工程師,主要研究方向為空間機器人技術。
TH13;TP24
: A
1006- 3242(2014)06- 0057- 06
