BD2系統廣域差分格網電離層模型研究與應用
2014-08-11 11:29:42崔瑩瑩賈為民
航天控制 2014年6期
關鍵詞:模型
崔瑩瑩 孟 詔 賈為民 宋 帥
北京航天自動控制研究所,北京 100854
?
BD2系統廣域差分格網電離層模型研究與應用
崔瑩瑩 孟 詔 賈為民 宋 帥
北京航天自動控制研究所,北京 100854

電離層延遲誤差是影響BD2衛星導航系統定位測速精度的關鍵因素,如何減少電離層誤差是當前衛星導航定位領域研究的熱點問題。常見的電離層模型包括廣域差分格網模型和Klobuchar模型,已有研究主要關注Klobuchar模型,對BD2廣域差分格網模型的研究較少。本文分析比較了廣域差分格網電離層模型和Klobuchar模型對電離層延遲誤差的影響,并進行了真實環境下的評測。實驗結果表明,使用廣域差分格網電離層模型修正電離層延遲可以減小電離誤差,從而提高單頻接收機導航定位精度。
BD2系統;廣域差分;格網電離層;電離層延遲誤差
近年來,BD2衛星導航系統發展迅速,至2012年末,隨著14顆北斗導航衛星進入預定軌道,導航系統已覆蓋整個亞太地區,因此應用前景廣闊,如何進一步提高定位測速精度是一個重要的研究方向。
對BD2衛星導航定位用戶而言,電離層延遲誤差是影響導航定位精度的主要誤差源之一。電離層引起的誤差一般為幾米左右,但當太陽黑子活動增強時,電離層中的電子密度會升高,電離層延遲誤差也隨之增加,其值可達十幾米甚至幾十米。因此,電離層延遲誤差是衛星導航定位中不可忽略的誤差,在實際工程應用中必須加以修正。本文分別介紹了廣域差分格網電離層模型和Klobuchar模型修正電離層誤差的方法,通過接收機實際接收衛星信號分析了2種電離層模型對電離層延遲誤差的影響。
1 電離層延時參數描述
電離層是一種散射介質,即其折射系數是電磁波頻率的函數,其中電離層的群折射率計算方法為[1]:
(1)
電離層的相折射率為:
(2)
其中,f為載波頻率,ne為電子密度,即單位面積上的電子數,它在不同的時間、不同的大氣高度是不同的。
對于BD2衛星信號來說,載波以相速傳播,而信號能量和偽碼則以群速傳播,則偽碼在電離層中所受到的以m為單位的電離層延時Iρ為[1]:

(3)
載波相位測量值所受到的以m為單位的電離層延時Iφ為:
(4)
其中,Ne為在信號傳播途徑上的、橫截面為1m2的通道空間里所包含的電子數總量。可見,彌散性的電離層降低了測距碼的傳播速度,造成偽距測量值變長;加快了載波相位的傳播速度,造成載波相位測量值變短。
2 BD2系統電離層延遲格網模型
北斗二號衛星導航系統建設的廣域增強系統(WAAS,Wide-Area Augmentation System)是由若干已知點位的參考站、中心站、地球同步衛星和具有差分處理功能的用戶接收設備組成。北斗二號廣域增強系統把復雜的電離層描述為距地面一定高度的薄層,并作為地面用戶和站點的共同電離層參考面。在參考面上,北斗二號廣域增強系統將特定區域按一定間隔分割成一定數量的網格,根據分布于WAAS系統區域內的一些監測站實時觀察電離層延遲數據,對整個WAAS區域內的電離層狀況進行估算,生成一定格式的電文,通過同步衛星傳送給區域內廣大用戶,用戶根據電文數據采用一定的算法獲得其所觀察到的衛星信號的電離層延遲值。
北斗二號廣域差分系統將各格網點上的電離層延遲按WAAS格式實時播發給單頻導航用戶,接收機用戶獲得格網點上的電離層延遲改正量,還需要根據相應參數計算出觀測時刻BD2信號從衛星到接收機的傳播途徑穿透電離層時的穿刺點位置及傾斜因子。圖1為電離層穿刺點[2]的幾何示意圖。
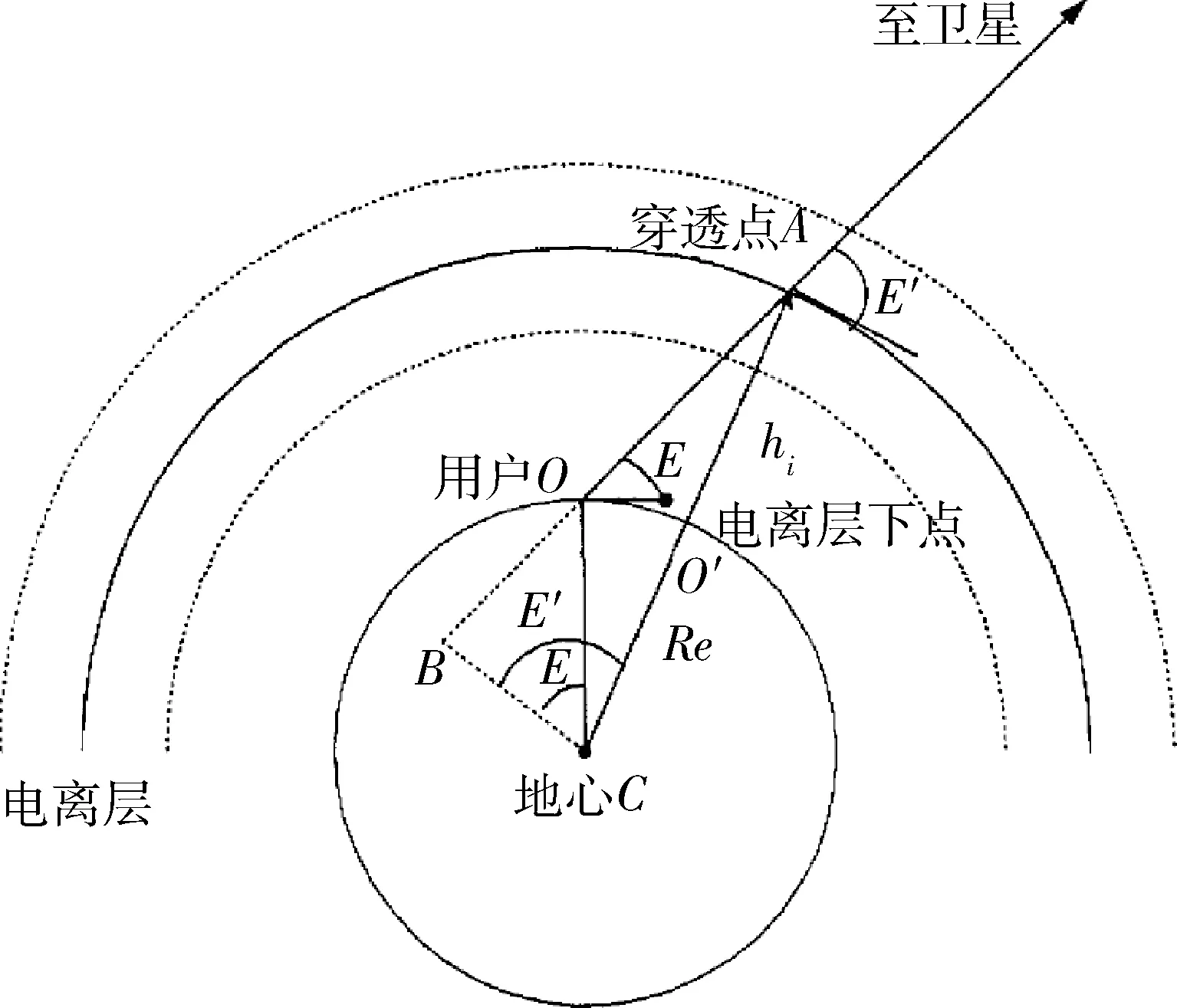
圖1 電離層穿刺點示意圖
圖1中,C為地心,O為用戶機位置(φu,λu);A是穿刺點位置;O′是電離層下點;平均地球軌道半徑Re=6378.137km;用戶仰角E=∠BCO;穿刺點A的仰角E′=∠BCA;最大電子濃度距地面的高度hi=375km;地心角φpp=∠ACO。
對三角形ACO運用正弦定理,得:
(5)
可得地心角φpp的計算公式如下[3-4]:
(6)
穿刺點的緯度:
φpp=arcsin(sinφucosφpp+cosφusinφppcosAz)
(7)
穿刺點的經度:
(8)
其中,Az為衛星方位角。
在計算出電離層穿刺點的經緯度后,可根據格網電離層修正算法計算穿刺點處的電離層延遲,具體算法如下。
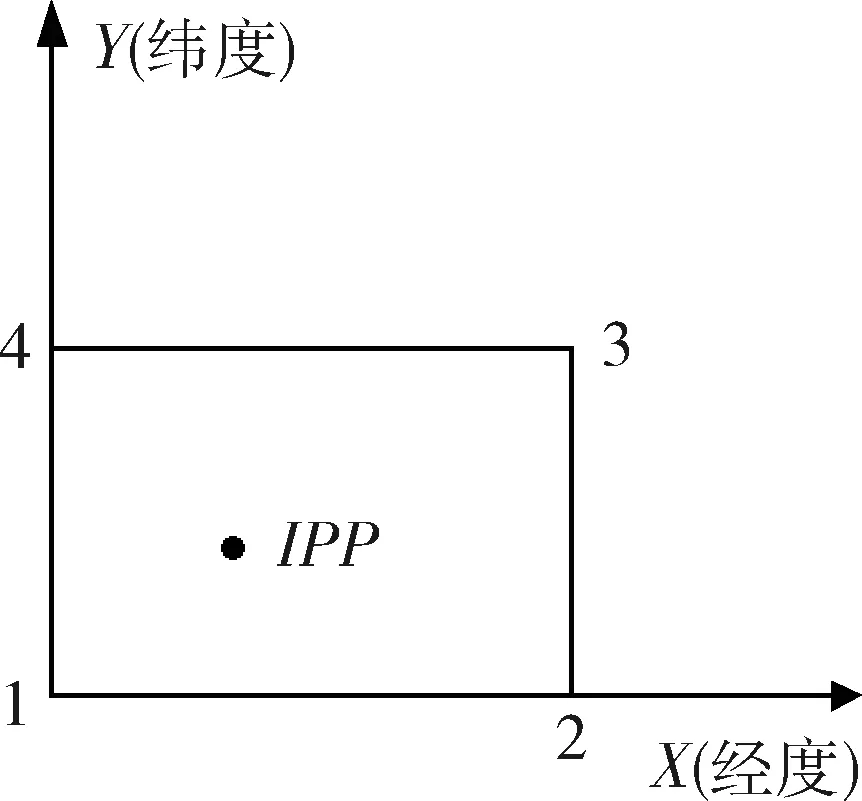
圖2 用戶穿刺點與格網點示意圖
圖2給出了用戶穿刺點與所在格網點的示意圖,其中IPP是用戶接收機與某一顆衛星連線對應電離層穿刺點所在的地理位置,用地理經緯度(φpp,λpp)表示。周圍4個格網點的位置分別用(φi,λi)(i=1,…,4)表示,格網點發播的天頂方向電離層延遲用VTECi(i=1,…,4)表示,穿刺點與4個格網點的距離權值分別用wi(i=1,…,4)表示。
當用戶穿刺點所在周圍4個格網點有效時,采用雙線性內插法計算穿刺點處的電離層延遲,計算公式如下[5-6]:
(9)
(10)
則權值分別為:
(11)
3 Klobuchar電離層延遲函數模型
Klobuchar模型是美國科學家Klobuchar于1987年提出的適用于單頻接收機的電離層延時改正方法。Klobuchar模型是用半個余弦函數描述白天的電離層延遲變化情況,用一個常數描述午夜至凌晨之間的電離層延時,數學表達式為[6]:
I=
(12)
式中,A是余弦函數的振幅,T是值必定大于20h的余弦函數周期,兩者分別用1個三階多項式表示,數學表達式為:
(13)
(14)
上式中,系數α0,α1,α2,α3,β0,β1,β2和β3是地面控制系統根據日期及前5d太陽的平均輻射流量而選取的,并編入衛星的導航電文中發播給用戶,φm為電離層穿刺點的地磁緯度。
Klobuchar模型代表了電離層時間延遲的周日平均特性,它取決于緯度和1d內的時刻。模型確定每天電離層的最大影響為當地時間的14點(即50400s),此時電離層中大氣分子在陽光照射作用下分解最為旺盛,相應的電離層延時也達到最大值。由于Klobuchar模型是一種全球性統計經驗型模型,而電離層在全球范圍內變化十分復雜,因此,其修正精度不高,在高緯和赤道地區通常更差。經驗表明,Klobuchar模型僅改正電離層影響的50%~60%,理想情況下可改正至75%[7]。
4 實驗驗證
為了分析廣域差分電離層格網模型與電離層函數模型對電離層誤差修正的差別,使用已在工程中應用的接收機,接收北斗B3頻點信號,分別使用Klobuchar模型和電離層格網修正電離層延遲,并同時輸出2種修正方法的定位結果。以1個已知點位作為定位結果參考點,對天進行連續拷機測試。數據采集時間從上午10點開始至下午16點,定位結果誤差分析方法如下。
設衛星信號接收天線定位點坐標為P0(X0,Y0,Z0),接收機輸出的定位結果為P(Xi,Yi,Zi)(i=1,…,N),則使用2種模型定位誤差計算方法如下:

(15)
采用上述誤差計算方法,分別計算2種電離層延遲修正算法的定位誤差,誤差分析如圖3所示。
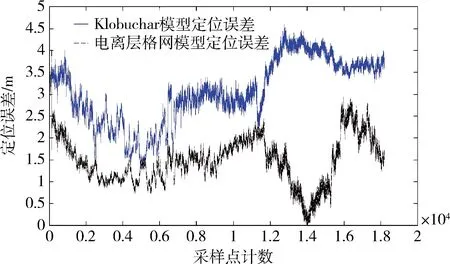
圖3 Klobuchar模型與電離層格網模型定位誤差圖
從圖3可以看到,經電離層格網模型修正后的定位結果誤差明顯優于Klobuchar模型修正的定位結果誤差,其中在下午14時左右,格網電離層修正效果最好(對應圖中第14000采樣點左右),此時電離層延遲最大,對定位精度的影響也最大。將2種修正模型的定位誤差相減,如圖4所示。
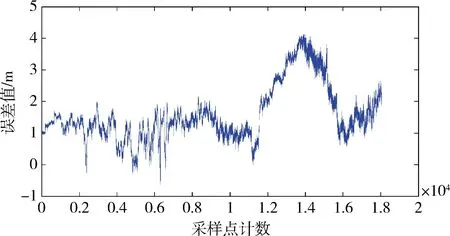
圖4 Klobuchar模型與電離層格網模型定位誤差的差值
圖4顯示了Klobuchar模型與電離層格網模型定位誤差的差值大小關系,經計算,與采用Klobu- char模型修正的定位結果相比,經電離層格網模型修正后的定位結果精度提高可達4m。可見,采用北斗導航系統的廣域差分電離層格網模型可以提高電離層延遲修正精度,從而改善單頻定位精度。
5 結論
介紹了電離層延時對BD2衛星導航定位測速精度的影響,闡述了BD2廣域差分格網電離層模型和Klobuchar模型修正電離層延遲的方法。經試驗驗證,與采用Klobuchar模型修正的定位結果相比,經電離層格網模型修正后的定位結果精度提高可達4m,從而提高了單頻接收機的定位精度。
[1] 謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:81- 82.
[2] Misra P, Enge P.Global Positioning System- Signals, Measurements, and Performance[M]. Ganga-Jamuna Press,2001:161- 169.
[3] Wide Area Augmentation System(WAAS) Specification[S].Federal Aviation Administration(FAA), FAA- E- 2892, May 9,1994.
[4] M B El- Arini, J A Klobuchar. The FAA Wide Area Differential GPS(WADGPS) Static Ionospheric Experiment[J].Proceedings of the ION National Technical Meeting 1993:485- 496.
[5] 黃智,袁洪,萬衛星.WAAS電離層格網改正算法在中國地區部分站點的試算精度[J].全球定位系統,2003,(6):5- 10.(HUANG Zhi,YUAN Hong,WAN Weixing. The Test of FAA WAAS Ionospheric Grid Corrections Algorithm[J]. Gnss World of China,2003,(6):5- 10.)
[6] 北斗衛星導航系統空間信號接口控制文件公開服務信號(2.0版)[S].中國衛星導航系統管理辦公室,BDS- SIS- ICD- 2.0,2013年12月.
[7] Parkinson B , Spiker J, Axelrad P, Enge P.Global Positioning System: Theory and Application[M].American Institute of Aeronautics and Astronautics, 1996:485- 515.
[8] Man- Lian Zhang, Sandro lL Radicella. Comparison Among IRI, GPS—IGS and Ionogram-derived Total Electron Contents[J].Advances in Space Research,2006 ,(37):972- 977.
TheResearchandApplicationofWideAreaDifferentialGridIonosphericModelinBD2System
CUI Yingying MENG Zhao JIA Weimin SONG Shuai
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
TheionosphericdelayerroristhekeyfactoraffectingtheprecisionofpositionandvelocityoftheBD2satellitenavigationsystem,therefore,howtoreducetheionosphericerrorisextensivelyconcernedinthefieldofsatellitenavigationandpositioning.RegardingthetwofamousionosphericmodelsknownaswideareadifferentialgridmodelandKlobucharmodel,therelatedresearchismainlyfocusedontheKlobucharmodel,whiletheresearchonBD2wideareadifferentialgridmodelisless.ThedifferenceofwideareadifferentialgridmodelandKlobucharmodelintheionosphericdelayerroriscomparedandanalyzedinthispaper,andthedifferenceintherealsatellitesignalenvironmentisevaluated.Theexperimentalresultsshowthattheuseofthewideareadifferentialgridmodeltocorrectionosphericdelaycanreducetheionosphericerror,whichiscomparedwiththeuseoftheKlobucharmodel.Thus,thenavigationprecisionofsingle-frequencyreceiverisimproved.
BD2system;Wideareadifferential;Gridionospheric;Ionosphericdelayerror
2014- 03- 11
崔瑩瑩(1985- ),女,安徽蚌埠人,碩士,工程師,主要研究方向為導航接收機軟件研究與設計;孟詔(1981- ),男,山東泰安人,碩士,工程師,主要研究方向為導航接收機軟件研究與設計;賈為民(1961-),男,北京人,學士,工程師,主要研究方向為衛星導航技術;宋帥(1986- ),男,保定人,碩士,助理工程師,主要研究方向為導航接收機軟件研究與設計。
V249.3
: A
1006- 3242(2014)06- 0012- 04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
