PID調節在管道缺陷檢測機器人控制系統中的應用
2014-08-24 02:04:08王偉
安徽師范大學學報(自然科學版) 2014年4期
王 偉
(北京石油化工學院 機械工程學院,北京 102617)
PID調節在管道缺陷檢測機器人控制系統中的應用
王 偉
(北京石油化工學院 機械工程學院,北京 102617)
本文介紹了管道機器人PID控制方法,實現了PID控制參數的在線自動整定,完成對管道缺陷檢測機器人的運動控制,保證檢測機器人的平穩運行和缺陷的準確檢測.試驗表明,該控制方法具有很高的可靠性和有效性.
管道機器人;PID控制;伺服電機;PMAC
隨著控制理論的不斷發展,在電機控制方面,出現了許多新型的、智能的控制方法,例如基于人工神經網絡的控制、PID控制、遺傳算法控制等,在眾多控制方法中,PID控制在機器人工業領域應用比較廣泛,是普遍采用的一種控制方法,自計算機進入控制領域以來,用數字計算機代替模擬計算機調節器組成控制系統,不僅可以用軟件實現PID控制算法,而且使PID控制更加靈活[1].本文就是采用PID控制方法對管道機器人進行控制研究.
1 管道缺陷檢測機器人控制系統
管道檢測機器人系統如圖1所示.它由機器人機械本體、圖像采集系統、地面監控系統和電力供給系統四大部分組成.
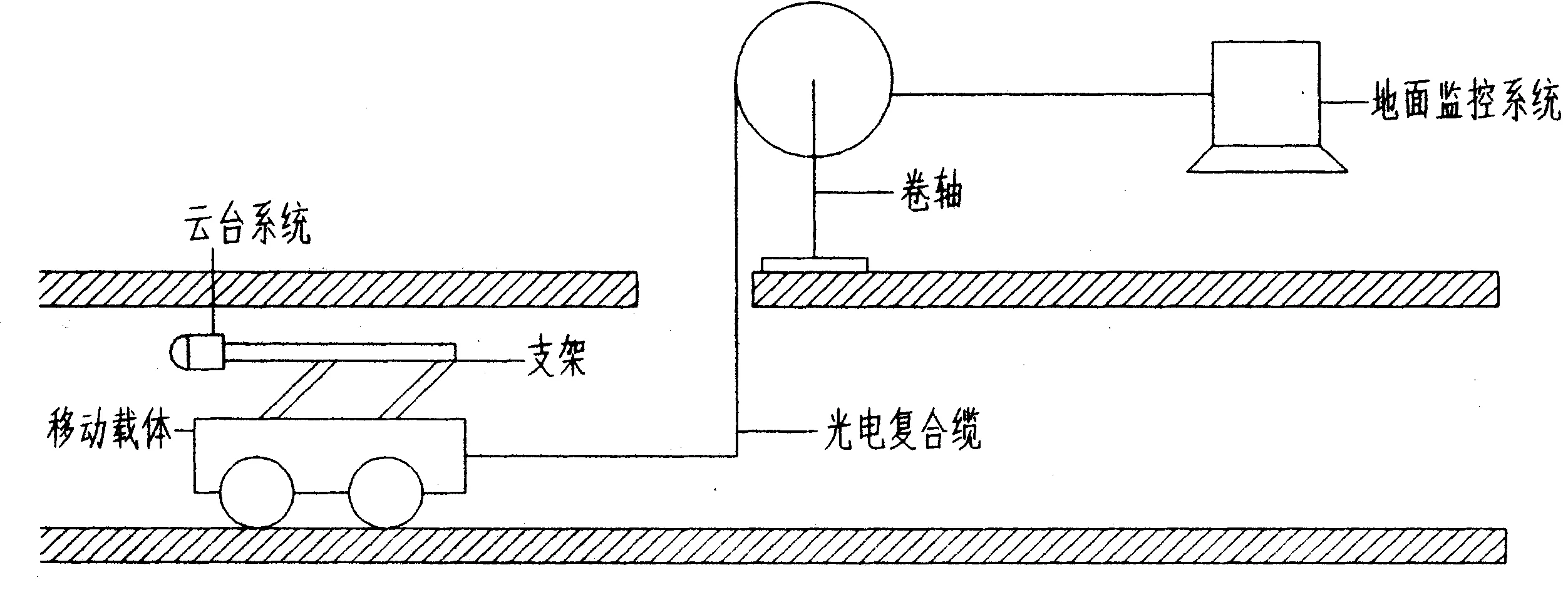
圖1 管道機器人系統
其工作過程是:管道機器人通過管道檢查口進入管道,在計算機發出的指令控制下以一定的速度在管道中運行,通過安裝在管道機器人機械本體上的圖像傳感器,實時的把管道內的環境參數和管道機器人的自身狀態反饋給管外的監控系統,便于操作人員掌握、控制管道機器人的工作過程[2].
管道缺陷檢測機器人控制系統是保證機器人平穩行走和缺陷準確檢測的核心,如圖2所示.本文采用模塊化分布式控制系統,選擇PC機+運動控制卡(PMAC)的控制模式,以PC機作為上位機,實現信息處理與人機交互的作用,根據電機的型號設定相應的控制模式及輸出控制指令;以運動控制卡(PMAC)作為下位機,實現機器人的運動控制功能[3].
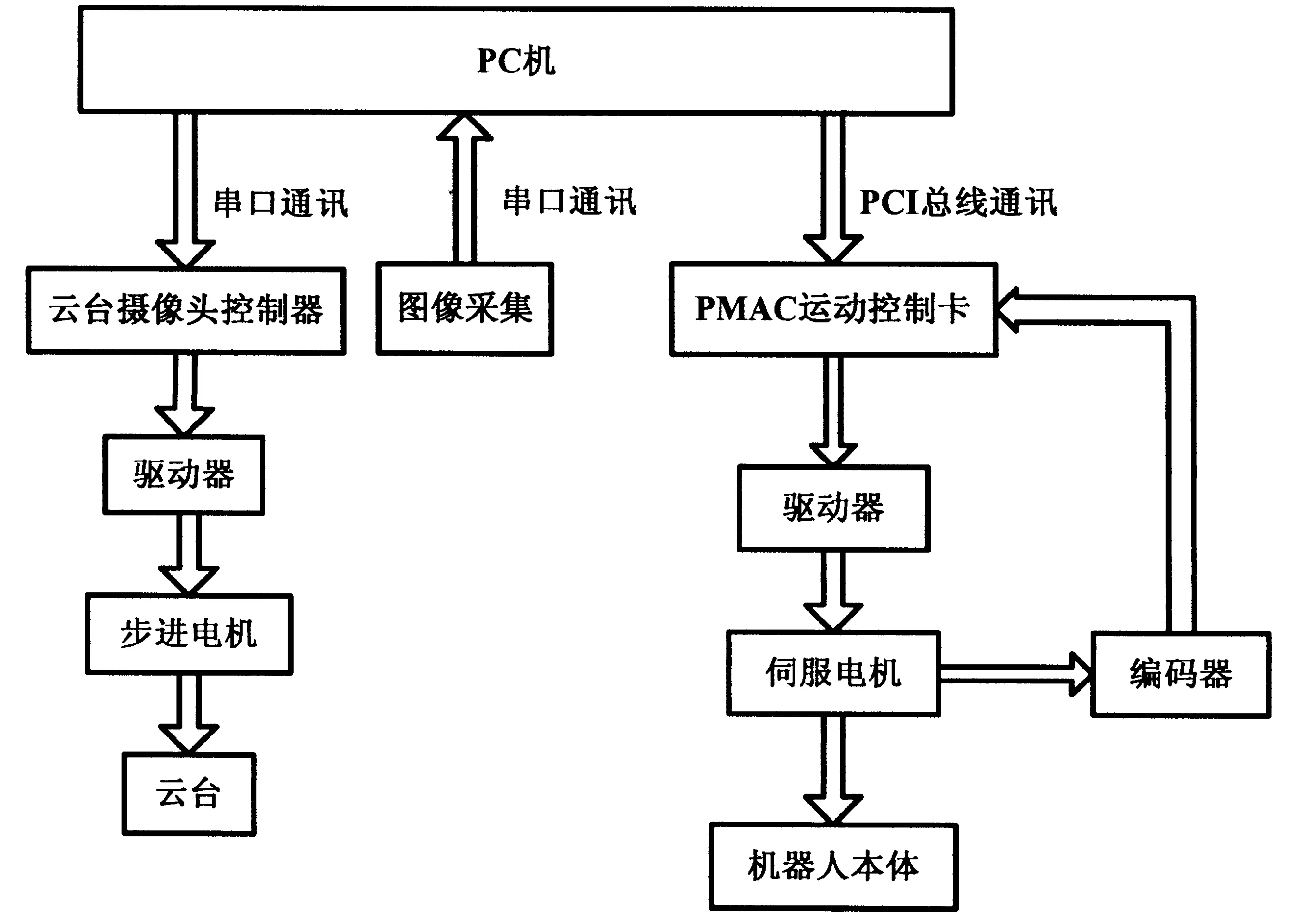
圖2 管道檢測機器人控制系統
為了獲得系統良好的動態特性和靜態特性,在管道缺陷檢測機器伺服電機系統中采用了兩套PID控制,即伺服驅動器與電機之間的PID調節和控制板卡與驅動器、電機之間的PID調節,這兩套PID調節在系統運行時同時產生作用,前者完成粗調,后者完成細調,首先要進行的是驅動器和電機的PID調節,當此PID參數調試完成后,再進行控制板卡的PID調節,使得電機運行的更安全、平穩[4].PID調節的關鍵是比例系數、微分系數、積分系數等參數的選定.
2 PID參數選定
2.1伺服驅動器的PID參數的選定
首先進行伺服驅動器本身的PID的調節,即粗調,調節方式可分為兩種:手動和自動,手動調節即按照PID的曲線圖像以及電機實際的運行狀態手動調節各個參數,這個對工作人員要求比較高,需要有一定的工程經驗,因為電機在不同位置,不同負載的情況下PID的參數調節是不一樣的,所以一般對于初調者不宜采用,一般使用第二種調節方法,即系統自動調節.圖3是安川伺服驅動器的PID參數自動調節界面.PN100、PN101、PN102分別對應著比例系數、積分系數和微分系數,實現伺服驅動器與電機之間的PID調節.
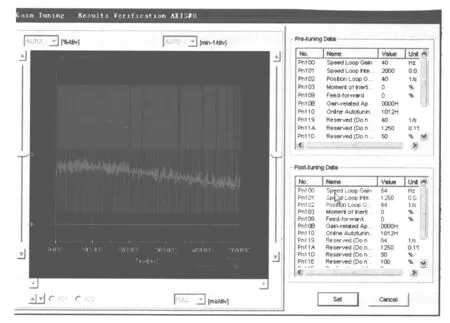
圖3 伺服驅動器PID參數自動調節
2.2PMAC的PID參數的選定
當伺服驅動器的PID調節結束后,再進行運動控制卡(PMAC)的PID參數調節,即細調.PMAC本身提供了PID參數調節軟件PEWIN TUNING,調節界面如圖4所示.
通過給伺服電機一個階躍信號,觀察系統對階躍信號的響應,通過PEWIN TUNING軟件自動生成的調試曲線圖及統計出衡量系統性能的指標數值,可以對系統的穩態性能及動態品質有個準確的把握.在用階躍信號來調試反饋增益時,主要調整PMAC卡參數Kp(比例系數Ix30)、Ki(微分系數Ix31)、Kd(積分系數Ix32)的數值.從圖4中可以看到各個參數的數值,可以手動改動,每改變一個參數值可以讓電機試運行,查看參數修改后的曲線圖,然后根據結果繼續修改,直到合適為止(如圖5所示).
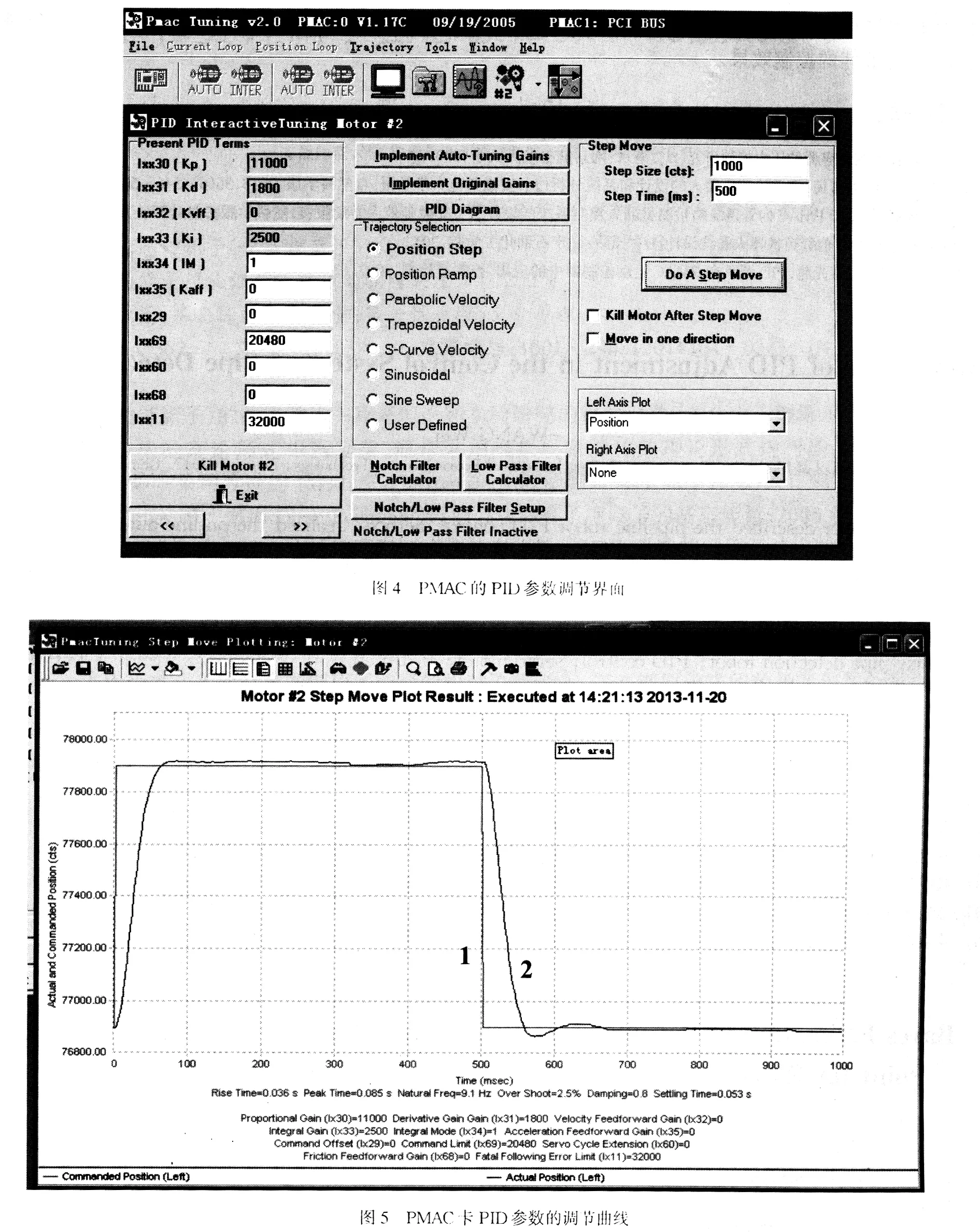
圖5中,1代表命令值,2代表響應值,從圖中可以看出,命令值和響應值基本符合,但是在TIME=570ms時,存在一定的震動,響應不是很準確,還有就是在時間剛開始的時候,響應速度不是特別快,可以根據圖像反應的問題進一步調節Kp、Ki、Kd.對于本文的管道機器人系統經過反復調試選擇調節參數為Kp=11000、Kd=1800、Ki=2500.
3 結論
通過管道缺陷檢測機器人控制系統的PID參數整定,可使系統運行平穩,實現管道缺陷的準確檢測.應用PEWIN TUNING軟件系統,通過階躍響應曲線還可以獲得控制系統的各項性能指標;在調節PID的過程中,要根據管道機器人實際工作指標調節,不能漫無目的的調節,通過試驗的方法對控制器PID參數進行整定,以獲得最佳的控制效果.
[1] 唐君君.較大容積容器的壓力控制研究[D].南京:南京航空航天大學,2009.
[2] 王偉,封立澤,劉占民.管道檢測機器人的設計和系統分析[J].安徽師范大學學報:自然科學版,2013,36(6):546-549.
[3] 王偉,林順英.基于PMAC的管道缺陷檢測機器人控制系統的設計[J].安徽師范大學學報:自然科學版,2014,37(1):43-46.
[4] 唐鵬.基于PMAC的管道機器人系統設計[D].撫順:遼寧石油化工學院,2012.
[5] 朱立達,朱春霞,蔡光起.PID調節在PMAC運動控制器中的應用.控制與檢測,2007,(2):50-53.
Astract: This paper described the pipeline robot PID control method, realized the on-line automatic setting of PID control parameters, achieved the motion control of the pipeline detection robot and ensured the accurate defect detection and the smooth operation of the inspection robot. Tests showed that this control method had high reliability and validity.
ApplicationofPIDAdjustmentintheControlSystemofPipeDetectionRobot
WANG Wei
(School of Mechanical Engineering, Beijing Institute of Petro-Chemical Technology, Beijing 102617, China)
pipe detection robot; PID control; servo motor; PMAC
2014-03-25
國家自然科學基金(51275051).
王偉(1968-),女,北京市人,副教授,碩士,從事測量與控制方面的教學和科研工作.
王偉.PID調節在管道缺陷檢測機器人控制系統中的應用[J].安徽師范大學學報:自然科學版,2014,37(4):339-342.
TP242
A
1001-2443(2014)04-0339-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34