變頻空調驅動電機的弱磁控制
2014-09-20 06:07:10陳寧張躍桂衛華喻壽益
電機與控制學報 2014年7期
陳寧, 張躍, 桂衛華, 喻壽益
(中南大學信息科學與工程學院,湖南長沙 410083)
對永磁轉矩分量進行變換得到
0 引言
由于寬調速范圍要求,內埋式永磁同步電機的弱磁控制日益受到人們的關注[1],IPMSM以其高功率密度、高功率因數、結構緊湊、調速范圍寬等優點,廣泛應用于變頻空調、機床、機器人等數控系統[2]。PMSM的轉子勵磁磁場由永磁體產生,無法在高速下進行恒功率運行。即使是由正弦波PWM逆變器驅動,利用電流相位角削弱永磁場的PMSM,高速下的輸出功率也會隨著速度的增加而迅速下降,無法獲得較寬的高速恒功率調速范圍。這一缺陷嚴重限制了擴展PMSM的高速應用范圍,擴大其恒功率弱磁運行能力,已經成為變頻空調領域研究中的一個重要課題。
弱磁控制使電機能夠在逆變器容量不變的情況下提高系統的最高速度運行能力;在最大調速范圍不變的條件下,降低電機的額定容量和逆變器容量[3-6]。文獻[7]提出了弱磁控制的公式計算法,它完全依賴于電機數學模型,只具有理論研究意義,很少在實際工程中直接應用。文獻[8]提出了查表法,查表法依賴大量的實驗數據,實現起來較為復雜。文獻[9-10]提出了利用電壓極限橢圓的梯度下降法,但是此方法弱磁調速區域的確定需要計算恒轉矩曲線和電壓極限橢圓的夾角,計算量大,實現較復雜。文獻[11]提出了負d軸電流補償法,從數字化控制系統的特點入手,分析了電流失控的原因,利用限幅后的負d軸電流進行弱磁控制,當d軸電流飽和后對q軸電流進行弱磁補償,達到了一定的弱磁擴速效果,但是在電機高速運行時損失了較大的電磁轉矩。
本文基于無位置傳感器控制系統,提出一種利用q軸電壓來調節d軸電流設定值的弱磁控制方法,對d軸電流設定值進行改進的控制方法,該方法控制精度高,魯棒性好。
1 IPMSM的數學模型
IPMSM的矢量控制基于轉子磁場定向的旋轉兩相d-q坐標系,在此坐標系下建立IPMSM的數學模型是最簡單有效的。IPMSM在定子兩相旋轉d-q坐標系下的電壓方程為
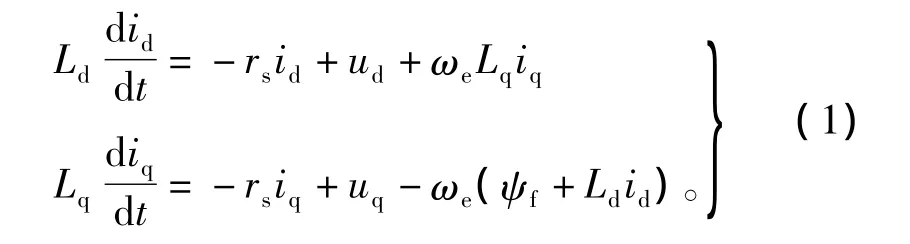
其中:Ld,Lq分別為d,q軸電感;id,iq分別為d,q軸電流;ud,uq分別為d,q軸電壓;rs為定子相電阻;ψf為轉子永磁磁鏈;ωe為電角速度。
輸出的電磁轉矩方程為

其中,p為磁極對數。
2 弱磁運行區域分析
2.1 最大轉矩電流比曲線
由于IPMSM的d軸電感小于q軸電感,負d軸電流可以增加磁阻轉矩分量。最大轉矩電流比(maximum torque per ampere,MTPA)控制算法[12-16]目的就是在基速以下的恒轉矩區域內由給定的轉矩控制使得定子電流幅值最小。

其中,λ為拉格朗日乘子。對式(3)求偏導并令其為零,可解得

式(4)體現在d-q坐標軸下是一條雙曲線,如圖1中AB曲線所示。這條曲線上的點在給定電流矢量的基礎上能輸出最大轉矩。隨著電機轉速的升高,電機將沿著曲線BC和最大轉矩電壓比曲線MTPV運行。隨著轉速的升高,轉矩的輸出能力逐漸減小[17]。
2.2 電壓極限環和電流極限環
由式(1)可知,當PMSM運行在穩定狀態時,d-q坐標系下的電壓方程可以表示為

考慮到逆變器的輸出能力和電機的額定參數,定子電流Is和定子端電壓Vs的約束方程為

其中:Ism為逆變器能承受電流的最大幅值;Vsm為逆變器輸出電壓的最大幅值。
通過控制d軸和q軸電樞電流,可以使得電機在基速以上恒功率弱磁區域運行時的定子端電壓等于逆變器輸出的極限電壓,即Vs=Vsm。
如圖1所示,在d-q平面上,電流約束方程是一個以Ism為半徑的圓,圓心在(0,0)點。B點是電流極限圓和MTPA曲線的交叉點,電機電流指令工作在這一點的速度ωb就稱為基速。
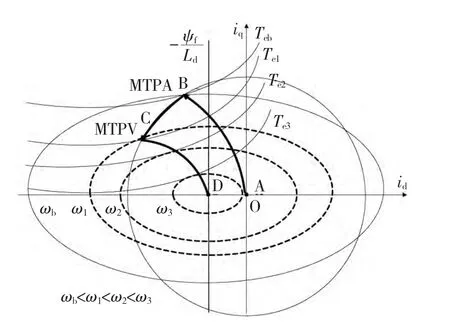
圖1 IPMSM運行時電流、電壓軌跡圖Fig.1 Trajectory of current and voltage of IPMSM
此外,忽略定子電阻壓降,由式(5)得到d軸電流id為
電壓約束橢圓可以改寫以成定子電流id和iq作為約束條件的不等式為
3 基于龍貝格觀測器的弱磁控制
3.1 IPMSM龍貝格觀測器的設計
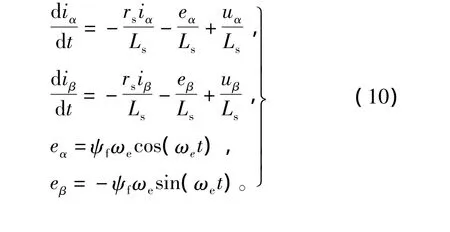
IPMSM的磁場定向控制算法要求準確地獲得轉子磁場的角度與位置信息,以便達到精準控制。在無位置傳感器控制方法中,提出一種基于龍貝格觀測器[18]的α-β參考坐標系下的位置、速度的估算方法,觀測器的輸出就是轉子電位置角θr以及轉子機械轉速ω,二者之間的關系為θr=pωt=ωet。在α-β坐標系下PMSM的數學模型為
式(10)可化簡為

式中:狀態變量x=[iαiβeαeβ]T;輸入矢量u=[uαuβ]T;輸出變量y=[iαiβ]T;A、Β、C分別為狀態矩陣、輸入矩陣及輸出矩陣,表示為
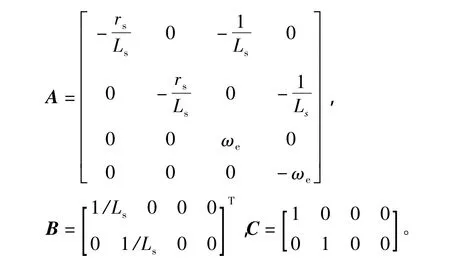
其中:iα、iβ、uα、uβ分別為電機在靜止坐標 α - β 系下的電流和電壓;eα、eβ為反電動勢狀態變量;Ls為d軸電感Ld及q軸電感Lq的平均值,Ls=(Ld+Lq)/2。
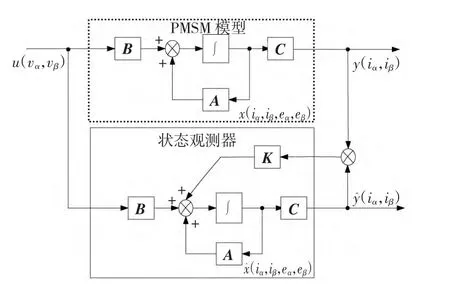
圖2 龍貝格觀測器框圖Fig.2 Block diagram of Luenberger observer
因此,所提出的龍貝格觀測器可以寫成^
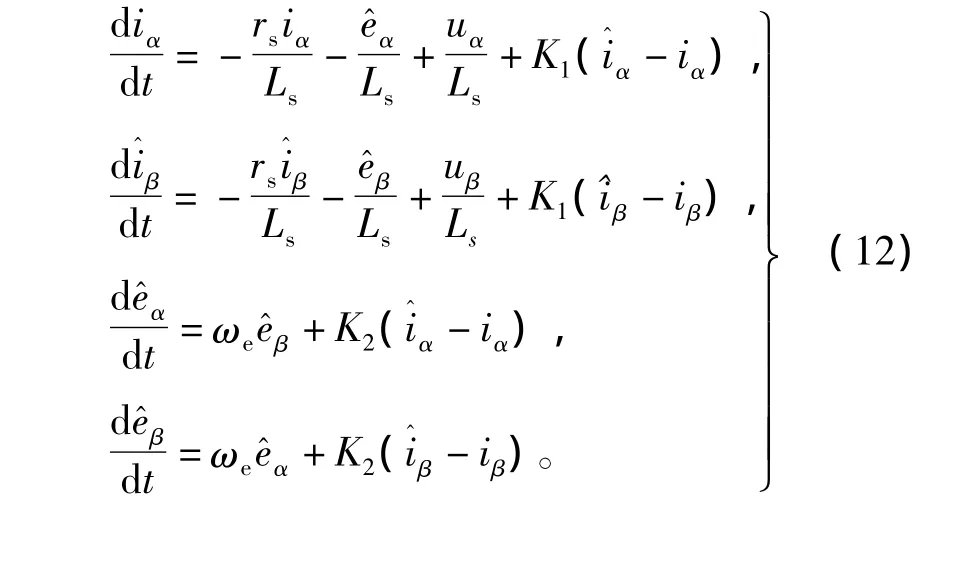
化簡得

將式(11)和式(13)作差可得誤差狀態向量的表達式為

估計得到反電動勢eα,eβ后,利用下式便可準確估算出轉子位置及速度為

3.2 IPMSM的弱磁控制算法
本文提出的控制方法的實際應用背景是變頻空調壓縮機驅動控制系統,對變頻空調壓縮機的控制要求算法簡單、便于實現。建立基于龍貝格觀測器的IPMSM弱磁算法控制系統模型,算法框圖如圖3所示。
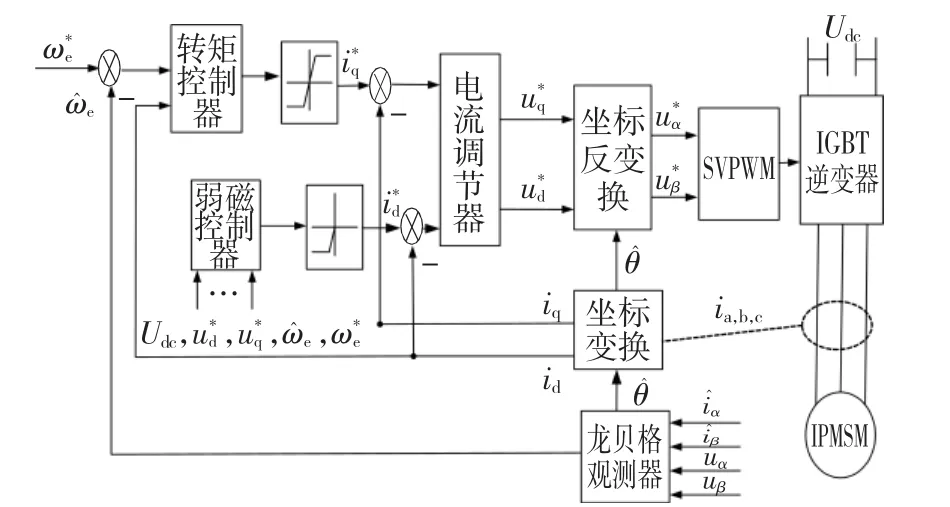
圖3 IPMSM控制系統弱磁算法框圖Fig.3 Block diagram of flux weakening method of IPMSM control system
圖3所示為基于轉子磁場定向矢量控制算法框圖,電機在基速以下運行時,從轉矩控制器的輸出可以獲得q軸電流設定值,而d軸電流設定值設為0;基速以上,反電動勢的幅值會越來越接近逆變器輸出的最大電壓Vsm,為了減小定子繞組上反電動勢的大小,需要獲得一個負的弱磁電流id,它產生的磁場方向與轉子永磁磁場方向相反。
式(8)表明:系統穩態時用q軸電壓uq可以控制id。為了計算d軸電流設定值,在任意時刻須考慮q軸電壓所能達到的最大值uqm,q軸電壓最大值應受約束關系為
系統穩態時,q軸電壓最大輸出值uqm和重構設定值u*q可以分別寫成
其中,ide為d軸電流誤差,ide=-id。
q軸電壓誤差定義為

由式(17)~式(19),將q軸電壓的輸出最大值與重構設定值相減,求解可得到d軸電流設定值的誤差信號為

對誤差信號進行PI運算求得d軸電流設定值,推出d軸電流設定值可求得為


圖4 弱磁控制器框圖Fig.4 Block diagram of flux weakening controller
圖4 為弱磁控制器的框圖,將d軸電流id,速度設定值與速度反饋值,直流母線電壓Udc,d軸電壓參考值,q軸電壓參考值,作為弱磁控制器的輸入,控制器輸出經過限幅環節得到d軸電流設定值。速度誤差Δω=-及d軸電流作為轉矩控制器的輸入,速度誤差信號的PI運算可得轉矩參考值,控制器輸出得到q軸電流設定值。在d軸電流不為零的情況下,利用轉矩解耦方法,式(2)輸出的電磁轉矩可分為永磁轉矩分量Teψ和磁阻分量Ter,其中
對永磁轉矩分量進行變換得到

由式(22)、式(23)解得


本文設計的弱磁控制器可以通過利用電壓誤差uqe實現對弱磁電流的控制,當弱磁控制器收斂時,定子電壓幅值接近母線電壓所能提供電壓的極限值Vsm,實現了對母線電壓的充分利用。
4 系統實驗及結果分析
4.1 系統仿真實驗
為驗證基于龍貝格觀測器的內埋式永磁同步電弱磁控制方法的準確性,用Matlab/SIMULINK仿真軟件對算法進行仿真驗證。電機參數為:電機極對數p=3,單相繞組rs=0.49 Ω,d軸電感Ld=6.5 mH;q軸電感Lq=11.8 mH;感應電壓常數為Ke=26.9 V/(1 000 r·min-1);轉矩常數為Kt=0.474;轉動慣量為J=0.000 63 kg·m2;額定轉速為1 000 r·min-1;PI控制參數為Kp=7.5,Ki=0.001。
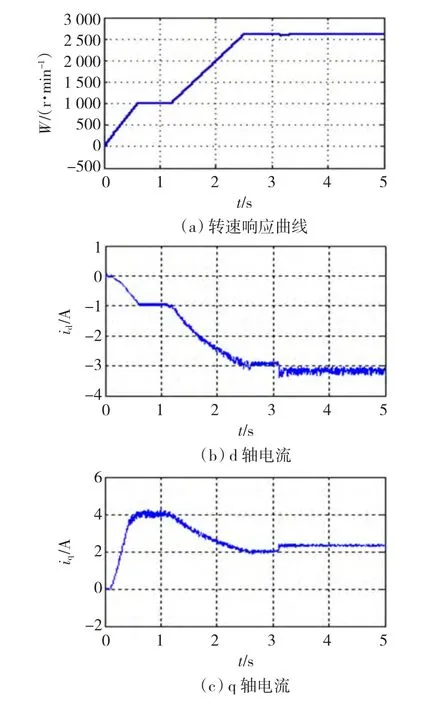
圖5 轉速上升、轉矩階躍變化時轉速、電流的響應曲線Fig.5 Speed,current response curve when speed rise and torque step
圖5為驅動電機速度從0加至1 000 r·min-1,1.2 s之后繼續升速到2600 r·min-1,3.15 s時負載轉矩從1 N·m加倍后d軸與q軸電流的響應波形,由圖5(a)可知在給定轉速的條件下,電機轉速響應良好。由于負載轉矩的突然加倍,而閉環系統輸出力矩的調節需要一定的響應時間,所以在負載轉矩加倍后的0.15 s內速度有短暫地波動,波動幅度小于50 r·min-1,控制算法對負載大幅突變有較好的穩定性;驅動電機先采用MTPA控制后引入弱磁控制,由圖5(b)、(c)知1.2 s以后,d軸電流負向變大,q軸電流也適當地減小;當負載轉矩在3.15 s時刻翻倍之后,為了保持驅動電機的平穩運行,d軸與q軸電流模值也變大。
4.2 系統實驗平臺開發
控制系統用一臺1.5匹變頻空調壓縮機驅動電機電機作為實驗對象。壓縮機額定轉速4500 r·min-1,其他參數同4.1節,控制系統實驗平臺整體設計如圖6所示。實驗平臺的硬件主要包括主電路電源及電機控制單元、檢測與通信電路、控制電路(以意法半導體公司的32位ARM芯片STM32F103R8T6為核心、逆變器采用功率集成模塊TGF7NC60HD)等;工作臺由計算機、數字示波器、接線板等構成。軟件開發環境為IAR Systems公司開發的一個集成開發環境(IAR EWARM),采用C語言編寫軟件,功能上實現了對變頻空調壓縮機驅動電機的弱磁調速控制。
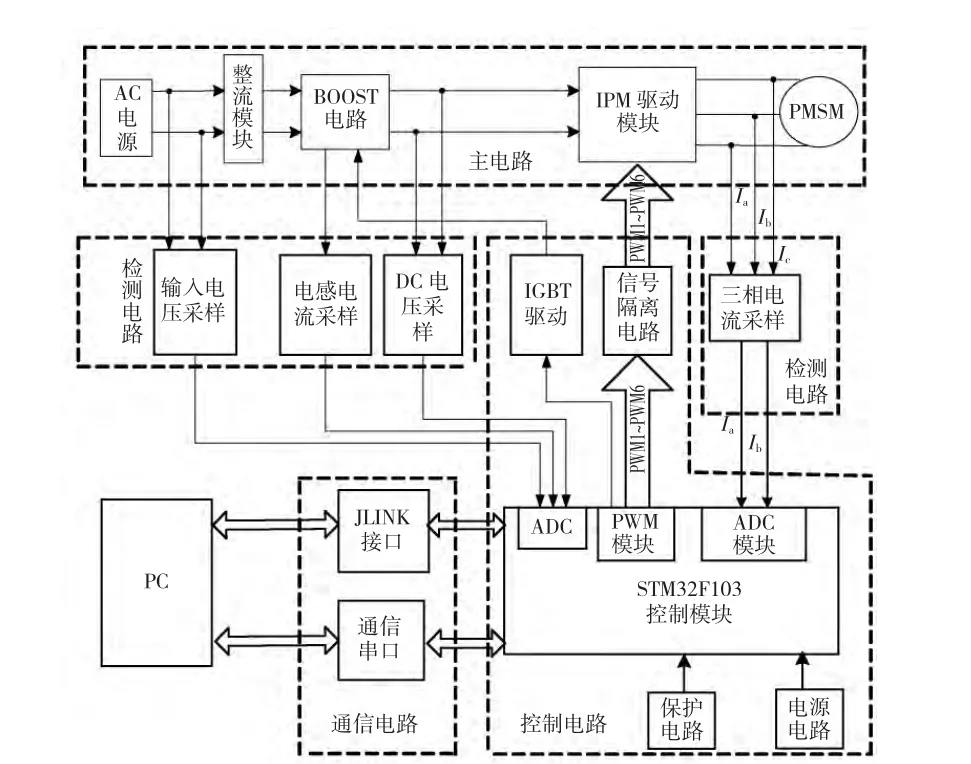
圖6 基于ARM的變頻空調用永磁同步電機弱磁控制系統實驗平臺Fig.6 Flux weakening control system experimental platform of IPMSM for air conditioner based on ARM
實驗中AD采樣頻率為1 kHz,每個變量采集10 000個數據,實驗結果的d軸電流、q軸電流、輸出轉矩、相電流波形如圖7~圖10所示。
從圖7和圖8可知,在最大轉矩電流比控制下的d軸電流為-1.9 A,q軸電流為10 A,此時能輸出最大轉矩;5 s之后開始弱磁控制,隨著速度的升高,d軸電流分量迅速變大,達到-6.2 A,弱磁能力較強,q軸電流相應減小。由圖9為輸出轉矩曲線,隨著弱磁強度的增加,輸出轉矩也隨之減小,最終輸出轉矩穩定在約1.95 N·m。圖10表明對于基于龍貝格觀測器的驅動電機在逆變器容量不變的情況下變頻空調可高頻穩定運行并且位置觀測正確。
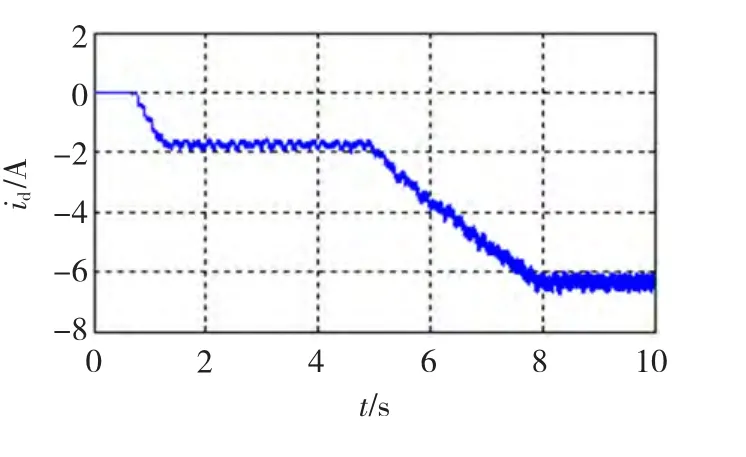
圖7 d軸電流曲線Fig.7 Current curve of d-axis
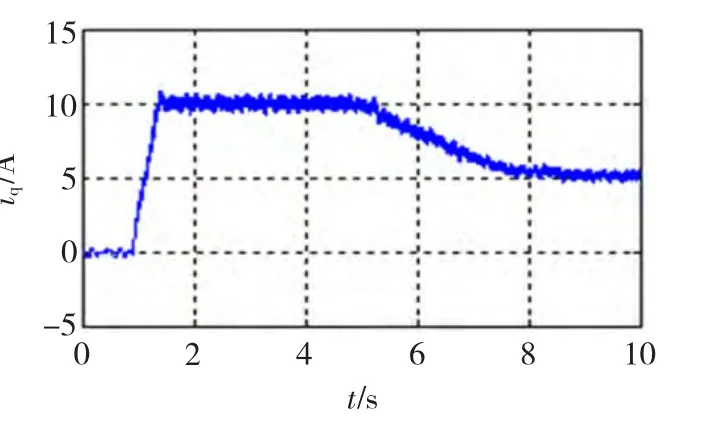
圖8 q軸電流曲線Fig.8 Current curve of q-axis
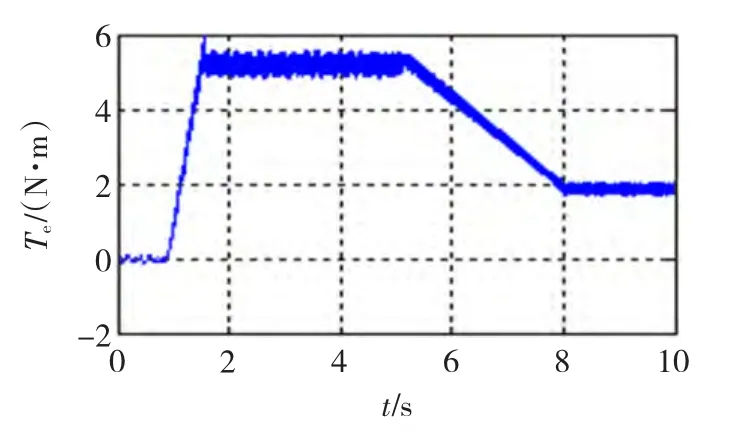
圖9 轉矩變化曲線Fig.9 Torque change curve
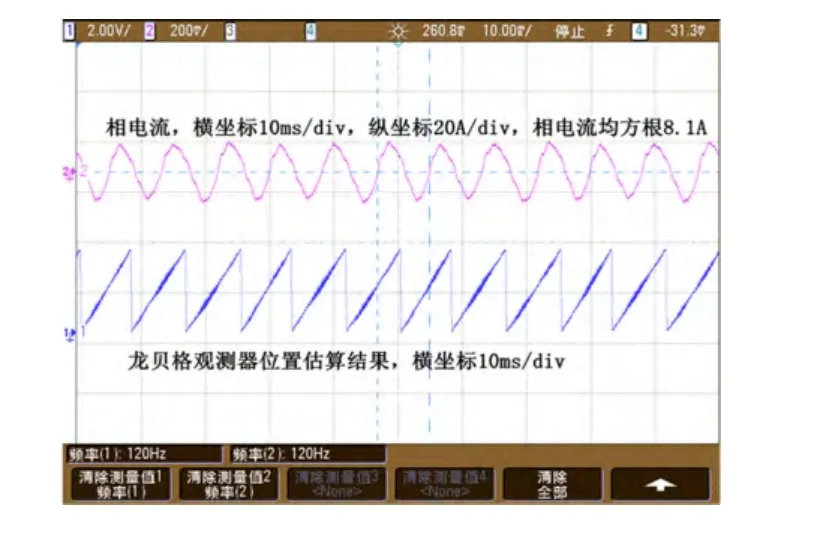
圖10 變頻空調120 Hz運行時相電流波形Fig.10 Phase current waveform when inverter air-condition running in 120 Hz
5 結語
針對變頻空調壓縮機驅動電機的無位置傳感器控制系統,本文提出了一種基于電機轉速和q軸電壓的弱磁控制方法。在電機低速運行時,采用最大轉矩電流比控制,以產生最大轉矩;弱磁運行時,采用本文提出的弱磁算法曲線運行,通過調節弱磁控制器的PI參數,使電機在高速時穩定運行。該算法實時性能好,算法簡單,進一步優化轉矩脈動問題后,可在變頻空調等領域推廣及產業化。
[1]唐任遠.現代永磁同步電機理論與設計[M].北京:機械工業出版社,1997:263-352.
[2]唐朝暉,丁強,喻壽益,等.內埋式永磁同步電機的弱磁控制策略[J].電機與控制學報,2010,14(5):68-72.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanent magnet synchronous motor[J].Journal of Electric Machines and Control,2010,14(5):68-72.
[3]陳書錦,楊帥,杜煦.永磁同步電動機弱磁運行控制研究[J].江蘇科技大學學報:自然科學版,2010,6(24):576-580.
CHEN Shujin,YANG Shuai,DU Xu.Weak flux control for permanent magnet synchronous motor[J].Journal of Jiangsu University of Science and Technology:Natural Science Edition,2010,6(24):576-580.
[4]喻壽益,曾國慶,高金生,等.37kW異步電機交流調速試驗平臺的研究[J].中南大學學報:自然科學版,2009,40(4):980-985.
YU Shouyi,ZENG Guoqing,GAO Jinsheng,et al.37kW asynchronous motor AC speed regulation experimental platform[J].Journal of Central South University:Science and Technology:Natural Science Edition,2009,40(4):980-985.
[5]馮江華,桂衛華,徐俊峰.考慮參數變化的永磁同步電動機弱磁控制研究[J].微電機,2008,41(4):20-31.
FENG Jianghua,GUI Weihua,XU Junfeng.Flux-weakening control research of permanent magnet synchronous machines considering parameters variation[J].Micromotors,2008,41(4):20-31.
[6]盛義發,喻壽益,洪鎮南.一種新穎的永磁同步電機直接轉矩控制方法[C]//第27屆中國控制會議.昆明:中國自動化學會控制理論專業委員會,2008:71-75.
[7]PAN Chingtsai,SUE Shinnming.A linear maximum torque per ampere control for IPMSM drive over full-speed range[J].IEEE Transactions on Energy Conversion,2005,20(2):359-366.
[8]LENKE R U,DE Doncker R W,KWAK Mushin,et al.Field weakening control of interior permanent magnet machine using improved current interpolation technique[C]//37th IEEE Power Electronics Specialists Conference,June 18-22,2006,Jeju,Korea.2006:1-5.
[9]盛義發,喻壽益,桂衛華,等.軌道車輛用永磁同步電機系統弱磁控制策略[J].中國電機工程學報,2010,30(9):74-79.SHENG Yifa,YU Shouyi,GUI Weihua,et al.Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J].Proceedings of the CSEE,2010,30(9):74-79.
[10]唐朝暉,丁強,喻壽益,等.表面貼裝式永磁同步電機弱磁控制策略的研究[J].控制工程,2011,18(3):384-387.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of an surface mounted permanent magnet synchronous motor[J].Control Engineering of China,2011,18(3):384-387.
[11]朱磊,溫旭輝,趙峰,等.永磁同步電機弱磁失控機制及其應對策略研究[J].中國電機工程學報,2011,31(18):67-72.
ZHU Lei,WEN Xuhui,ZHAO Feng,et al.Control policies to prevent PMSMs from losing control under field-weakening operation[J].Proceedings of the CSEE,2011,31(18):67-72.
[12]竇汝振,溫旭輝.永磁同步電動機直接轉矩控制的弱磁運行分析[J].中國電機工程學報,2005,25(12):117-121.
DOU Ruzhen,WEN Xuhui.Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CSEE,2005,25(12):117-121.
[13]SIMANEK J,NOVAK J,CERNY O,et al.FOC and flux weakening for traction drive with permanent magnet synchronous motor[C]//2008 IEEE International Symposium on Industrial Electronic,June 30-July 2,2008,Cambridge,UK.2008:753-758.
[14]KWON Taesuk,SUL Seungki.A novel flux weakening algorithm for surface mounted permanent magnet synchronous machines with infinite constant power speed ratio[C]//2007 International Conference on Electrical Machines and Systems,Oct 8-11,2007,Seoul,Korea.2007:440-445.
[15]成秋良,朱熀秋.無軸承永磁同步電機增磁調壓轉速控制策略[J].中國電機工程學報,2009,29(3):91-95.
CHENG Qiuliang ZHU Huangqiu.Speed control strategy of bearingless PMSM by means of voltage regulating under flux enhancing operation[J].Proceedings of the CSEE,2009,29(3):91-95.
[16]劉春光,臧克茂,馬曉軍.電傳動裝甲車輛用永磁同步電動機的弱磁控制算法[J].微特電機,2007,35(4):27-30.
LIU Chunguang,ZANG Kemao,MA Xiaojun.Research on fluxweakening control of PMSM for electric drive armored vehicle[J].Small&Special Electrical Machines,2007,35(4):27-30.
[17]冷再興,馬志源.一種新的內置式永磁同步電機弱磁調速控制方法[J].微電機,2006,39(6):11-14.
LENG Zaixing,MA Zhiyuan.Space vector field weaking control of IPMSM drives[J].Micromotors,2006,39(6):11-14.
[18]LAGRIOUI A,MAHMOUDI H.Speed and current control for the PMSM using a Luenberger observer[C]//2001 International Conference on Multimedia Computing and Systems,April 7-9,2011,Ouarzazate,Morocco.2011:1-6.