雙Y移30°PMSM兩電機(jī)串聯(lián)系統(tǒng)的諧波效應(yīng)
2014-09-20 06:07:14劉陵順張少一劉華菘
電機(jī)與控制學(xué)報(bào) 2014年7期
關(guān)鍵詞:系統(tǒng)
劉陵順, 張少一, 劉華菘
(海軍航空工程學(xué)院控制工程系,山東煙臺(tái) 264001)
0 引言
全電艦船、多電飛機(jī)概念的提出,以及機(jī)車牽引、機(jī)器人、紡織、造紙等工業(yè)用電系統(tǒng)的應(yīng)用要求,需要研究解耦運(yùn)行的多電機(jī)交流傳動(dòng)系統(tǒng),為此提出了一種基于廣義零序諧波分量的單逆變器驅(qū)動(dòng)雙Y移30°PMSM兩電機(jī)串聯(lián)系統(tǒng)。該系統(tǒng)是由兩臺(tái)雙Y移30°PMSM按照一定的定子繞組聯(lián)結(jié)規(guī)則串聯(lián)而成,可在同一逆變器和同一套控制平臺(tái)下實(shí)現(xiàn)各臺(tái)電機(jī)的解耦運(yùn)行,有助于節(jié)省控制驅(qū)動(dòng)裝置及其外圍電路,降低了系統(tǒng)的體積、重量與成本。目前對(duì)于單逆變器驅(qū)動(dòng)多電機(jī)串聯(lián)系統(tǒng)的研究多以原理可行性探索為主,研究對(duì)象主要集中在多相感應(yīng)電動(dòng)機(jī)串聯(lián)系統(tǒng),對(duì)于多相PMSM串聯(lián)系統(tǒng)的研究還較為少見[1],已有文獻(xiàn)主要研究了理想正弦波磁場(chǎng)分布下多電機(jī)串聯(lián)系統(tǒng)的基本原理和控制策略[2-5]。由于電機(jī)的實(shí)際氣隙磁場(chǎng)通常存在著一系列的高次諧波,將對(duì)串聯(lián)系統(tǒng)的解耦控制產(chǎn)生影響。為此,文獻(xiàn)[6]采用虛擬多電機(jī)機(jī)電耦合的概念就五相PMSM反電動(dòng)勢(shì)諧波對(duì)串聯(lián)系統(tǒng)矢量控制的影響進(jìn)行了分析,文獻(xiàn)[7]分別研究了2臺(tái)五相電機(jī)串聯(lián)系統(tǒng)以及對(duì)稱六相串聯(lián)三相電機(jī)系統(tǒng)的定子繞組設(shè)計(jì)特點(diǎn)。考慮到雙Y移電機(jī)可靠性更強(qiáng),其力矩脈動(dòng)平均值只有對(duì)稱六相電機(jī)的14%,諧波電流較小,雙Y移30°PMSM兩電機(jī)串聯(lián)系統(tǒng)具有更大的軍事應(yīng)用價(jià)值。本文以定子集中繞組的雙Y移30°PMSM為研究對(duì)象,利用繞組函數(shù)的概念,研究了不同類別的高次空間諧波與另一臺(tái)相串聯(lián)的雙Y移30°PMSM基波磁動(dòng)勢(shì)相互作用對(duì)系統(tǒng)解耦運(yùn)行產(chǎn)生的影響規(guī)律,建立了該串聯(lián)系統(tǒng)中其中一臺(tái)PMSM包含5、7次空間諧波的多維空間數(shù)學(xué)模型,進(jìn)行了變速、變負(fù)載的仿真研究,揭示了該串聯(lián)系統(tǒng)多相PMSM定子繞組必須為正弦波分布的根本原因。
1 高次空間諧波的耦合效應(yīng)分析
正弦波分布的雙Y移30°PMSM基于自然坐標(biāo)系下的數(shù)學(xué)模型經(jīng)過全維空間解耦矩陣運(yùn)算后,變換到由dq-xy-o1o23個(gè)正交基組成的正交平面上,其中電機(jī)的電磁轉(zhuǎn)矩完全是由dq電流分量決定,而與它們的xy電流分量和o1o2零序分量無(wú)關(guān)[8-12]。因此,雙Y移30°PMSM的磁通和轉(zhuǎn)矩控制只需要dq平面上的兩個(gè)電流分量即可,而xy平面的2個(gè)電流分量可以用來(lái)控制另一臺(tái)雙Y移30°PMSM,為此需將另一臺(tái)電機(jī)的定子繞組與第一臺(tái)電機(jī)的定子繞組通過適當(dāng)?shù)南嘈蜣D(zhuǎn)換串聯(lián)在一起,保證第一臺(tái)電機(jī)的磁通和轉(zhuǎn)矩生成電流分量不會(huì)在在第二臺(tái)電機(jī)中生成磁通和轉(zhuǎn)矩,反之亦然。2臺(tái)雙Y移30°PMSM串聯(lián)系統(tǒng)與逆變器的聯(lián)結(jié)圖如圖1所示。
為了分析圖1串聯(lián)PMSM定子繞組必須為正弦分布,下面利用PMSM1含有所有諧波的集中繞組研究各類諧波對(duì)解耦運(yùn)行的影響情況,假設(shè)定子繞組分布不對(duì)稱,則PMSM1中的高次諧波主要有:12i±1次(i=1,2,3,…)以及6i±1次(i=1,3,5,…)兩大類奇次諧波以及各偶次諧波。

圖1 兩臺(tái)雙Y移30°PMSM串聯(lián)系統(tǒng)Fig.1 Dual Y shift 30°PMSM series-connected system
根據(jù)圖1中的聯(lián)結(jié)關(guān)系,假設(shè)兩臺(tái)電機(jī)的基波電流的初始相位為零,則可得逆變器輸出電流與2
臺(tái)串聯(lián)電機(jī)電流的關(guān)系為[7]
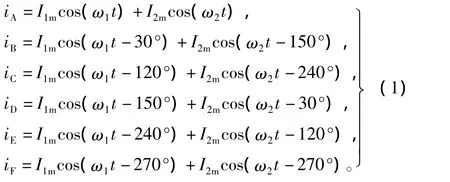
其中,I1m,I2m分別為2臺(tái)電機(jī)基波電流分量的幅值,ω1,ω2分別為2臺(tái)電機(jī)基波電流分量的角頻率。
假定PMSM1短距集中繞組下a相的繞組函數(shù)如圖2所示。
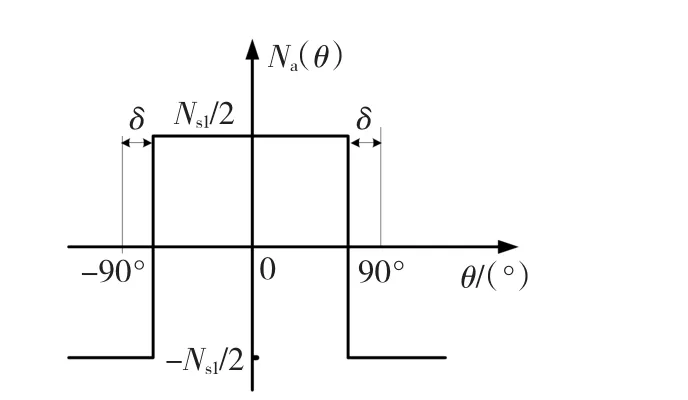
圖2 短距集中繞組下a相的繞組函數(shù)波形Fig.2 Winding function waveform of short-pitched concentrated coil
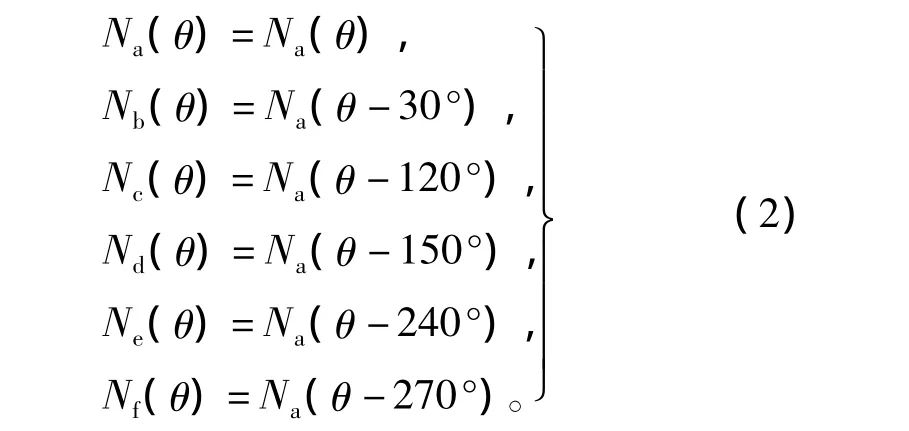
設(shè)PMSM1每相繞組的總有效匝數(shù)為Ns1,δ為短距角度,各相繞組函數(shù)之間的關(guān)系為
所以PMSM1定子繞組的傅里葉函數(shù)推導(dǎo)為
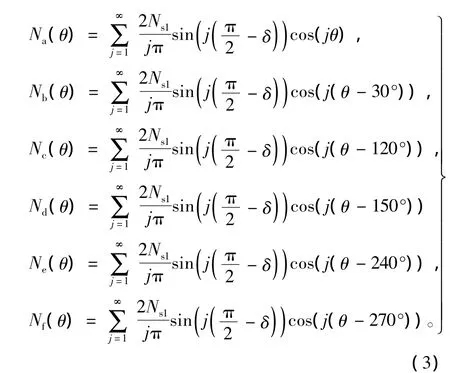
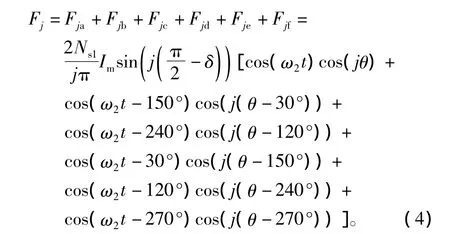
利用式(1)中PMSM2的磁通、轉(zhuǎn)矩基波電流以及式(3),可得PMSM1中的第j次諧波與PMSM2基波電流產(chǎn)生的磁動(dòng)勢(shì)表達(dá)式為
據(jù)此可以推導(dǎo)出PMSM1氣隙磁場(chǎng)中各類諧波與PMSM2的耦合作用,具體討論如下:
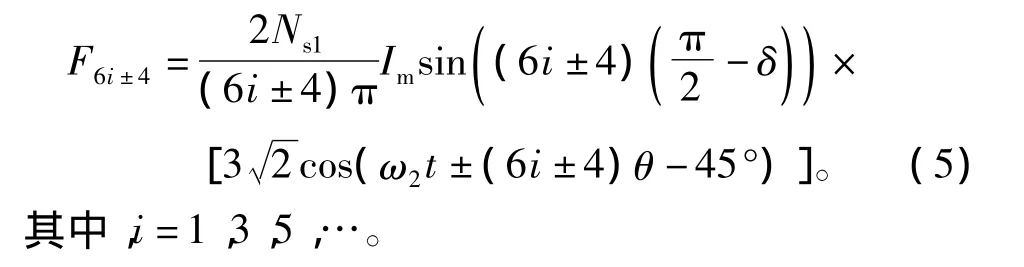
據(jù)此,PMSM1的(6i±4)次諧波(i=1,3,5,…)與PMSM2的基波電流耦合在PMSM1內(nèi)產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。(6i+4)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2的基波磁場(chǎng)相反,(6i-4)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2的基波磁場(chǎng)相同。
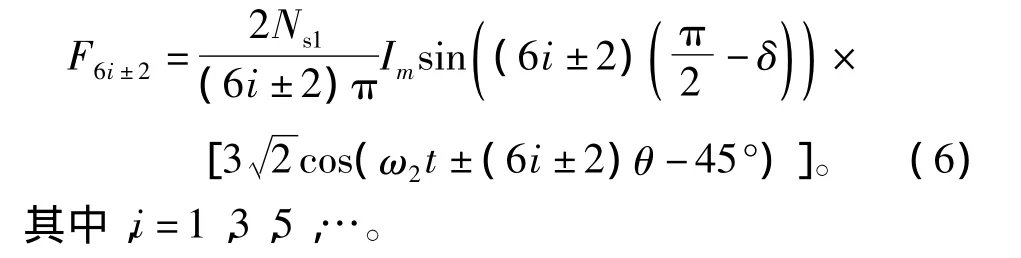
據(jù)此,PMSM1的(6i±2)次諧波(i=1,3,5,…),與PMSM2的基波電流耦合在PMSM1內(nèi)產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。(6i+2)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2基波磁場(chǎng)相同。(6i-2)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2基波磁場(chǎng)相反。
同理,對(duì)于PMSM1中的奇次諧波與PMSM2的

其中,i=1,3,5,…。
(6i±1)次諧波(i=1,3,5,…)與PMSM2的基波電流耦合在PMSM1內(nèi)產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。其中(6i+1)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2的基波磁場(chǎng)相反,(6i-1)次諧波產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向與PMSM2基波磁場(chǎng)相同。
此外,(12i±1)次奇次諧波(1,11,13,23,25…)以及3的倍數(shù)次諧波,將不會(huì)與PMSM2的基波電流產(chǎn)生耦合,因而,其產(chǎn)生的旋轉(zhuǎn)磁動(dòng)勢(shì)為零。
由此可見,PMSM2的基波電流與PMSM1的某些高次諧波互相耦合,在PMSM1中產(chǎn)生旋轉(zhuǎn)磁動(dòng)勢(shì),其旋轉(zhuǎn)速度由兩臺(tái)串聯(lián)電機(jī)的同步轉(zhuǎn)速ω1和ω2共同控制,通常情況下 ω2與 ω1不相等,會(huì)在PMSM1中產(chǎn)生電磁轉(zhuǎn)矩脈動(dòng),從而影響PMSM1的正常運(yùn)行。因此,在該串聯(lián)系統(tǒng)中,務(wù)必要求兩臺(tái)串聯(lián)電機(jī)的磁場(chǎng)分布呈正弦波,且在空間對(duì)稱分布,從而消除各偶次諧波以及(6i±1)次奇次諧波,i=1,3,5,…。
另外,盡管PMSM1中的(12i±1)次諧波不與PMSM2的基波電流耦合產(chǎn)生旋轉(zhuǎn)磁動(dòng)勢(shì),但它們會(huì)與自身的基波電流分量作用產(chǎn)生高次轉(zhuǎn)矩紋波,因此,在電機(jī)設(shè)計(jì)中需要消除這些諧波。基波電流相互耦合的效果分析如下:
25 、7次空間諧波對(duì)解耦控制的影響仿真
2.1 含5、7次諧波的串聯(lián)系統(tǒng)數(shù)學(xué)模型
通常電機(jī)的定子繞組呈對(duì)稱分布,偶次諧波自然消失。為了驗(yàn)證串聯(lián)電機(jī)的(6i±1)奇次諧波(i=1,3,5,…),對(duì)該串聯(lián)系統(tǒng)運(yùn)行存在的耦合問題,假定PMSM1中包含5、7次諧波(其他更高次諧波由于幅值過小可忽略),PMSM2中氣隙磁場(chǎng)只有基波,不存在高次諧波。
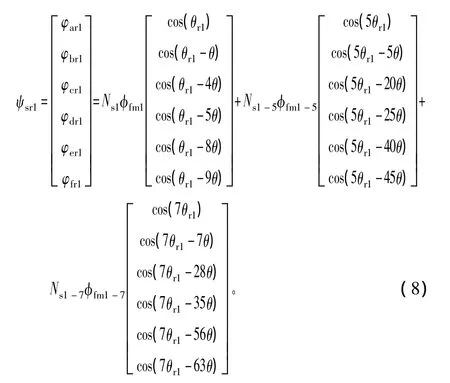
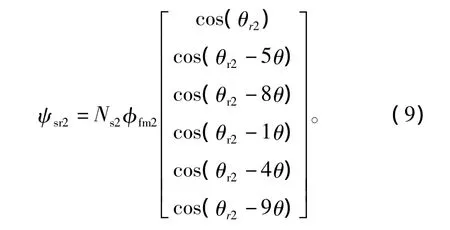
設(shè)Ns1Ns1為PMSM1的每相定子繞組匝數(shù),φfm1φfm1為PMSM1永磁主磁通,θr1為PMSM1轉(zhuǎn)子磁場(chǎng)軸線與定子A相繞組軸線之間的電角度,φfm1-5為PMSM1的5次諧波磁通,φfm1-7為PMSM1的7次諧波磁通,Ns1-5為PMSM1的5次諧波等效繞組匝數(shù),Ns1-7為PMSM1的7次諧波等效繞組匝數(shù),Ns2為PMSM2的定子繞組匝數(shù),φfm2為PMSM2永磁主磁通,θr2為PMSM2轉(zhuǎn)子磁場(chǎng)軸線與定子A相繞組軸線之間的電角度。
PMSM1的轉(zhuǎn)子磁場(chǎng)與定子繞組交鏈的磁鏈為
PMSM2轉(zhuǎn)子磁場(chǎng)交鏈在定子各相繞組中的磁鏈為

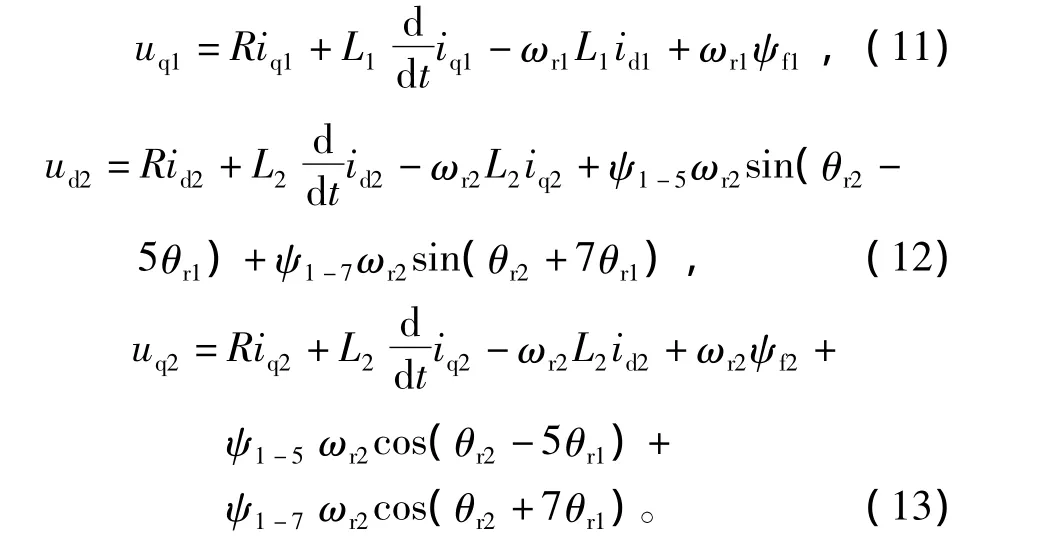
經(jīng)同步旋轉(zhuǎn)坐標(biāo)變換后,可推出PMSM1和PMSM2電壓方程為

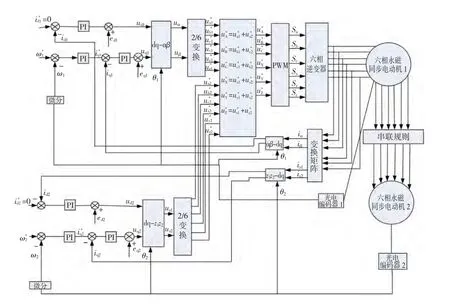
圖3 串聯(lián)系統(tǒng)基于id=0的矢量控制系統(tǒng)圖Fig.3 Vector control system based on id=0 for series-connected system
PMSM1和PMSM2的轉(zhuǎn)矩方程分別為
分析式(14)、式(15)可見,在PMSM2的id2或iq2id2非零時(shí),PMSM1的電磁轉(zhuǎn)矩必有脈動(dòng),脈動(dòng)幅值主要與id2、iq2以及空間諧波 ψ1-5、ψ1-7的大小相關(guān),脈動(dòng)的頻率和2臺(tái)電機(jī)的轉(zhuǎn)速都相關(guān)。PMSM2的轉(zhuǎn)矩只與自身的iq2和ψf2有關(guān),不受PMSM1的空間諧波影響。
2.2 PMSM1含5、7次諧波串聯(lián)系統(tǒng)耦合性能仿真
為了驗(yàn)證PMSM1含有的5、7次空間諧波會(huì)影響串聯(lián)系統(tǒng)的解耦控制,采用id=0的載波調(diào)制
PWM矢量控制策略對(duì)2臺(tái)雙Y移30°PMSM串聯(lián)系統(tǒng)建模仿真,如圖3所示。參數(shù)設(shè)置:極數(shù)p1=p2=4,磁通 ψf1=ψf2=0.2 Wb,ψ1-5=0.08 Wb,ψ1-7=0.06 Wb,摩擦系數(shù)B1=B2=0.05,轉(zhuǎn)動(dòng)慣量J1=J2=0.1 kg·m2,R1=R2=2.875 Ω,L1=L2=0.12 H。
PMSM1變負(fù)載仿真如圖4所示:PMSM1含5、7次空間諧波,初始負(fù)載為1 N·m,在1 s從1 N·m增加到10 N·m,轉(zhuǎn)速為200 r/min;PMSM2不含諧波,負(fù)載為2 N·m不變,轉(zhuǎn)速為250 r/min。
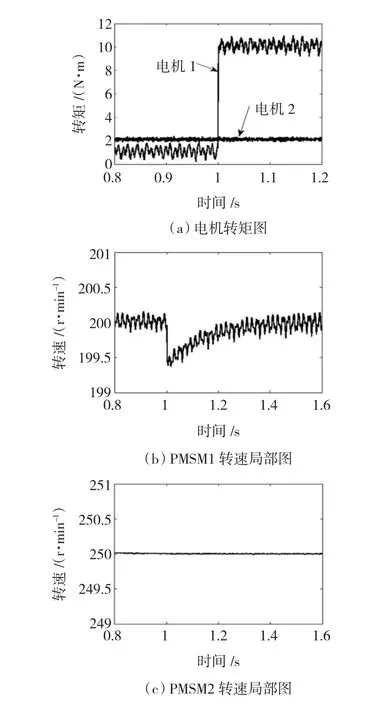
圖4 PMSM1變負(fù)載運(yùn)行Fig.4 Variable load operating of PMSM1
由以上仿真可知:
1)當(dāng)PMSM1含5、7次空間諧波,PMSM2只有基波時(shí),只要PMSM2帶負(fù)載,即iq2存在,PMSM1就存在轉(zhuǎn)矩和轉(zhuǎn)速脈動(dòng),脈動(dòng)的頻率和幅值與PMSM1的負(fù)載變化無(wú)關(guān)。
2)PMSM1的負(fù)載增加對(duì)PMSM2的轉(zhuǎn)速和轉(zhuǎn)矩均無(wú)影響,這說明不含空間諧波的PMSM2在該串聯(lián)系統(tǒng)中不受PMSM1的變載影響。
3)PMSM1的負(fù)載在1 s增加時(shí),其轉(zhuǎn)速小幅下降并迅速恢復(fù)。
PMSM2變負(fù)載仿真如圖5所示:PMSM1含5、7次空間諧波,空載不變,轉(zhuǎn)速設(shè)為200 r/min;PMSM2不含諧波,負(fù)載為2 N·m,在1 s時(shí)從2 N·m變?yōu)?0 N·m,轉(zhuǎn)速設(shè)為250 r/min。
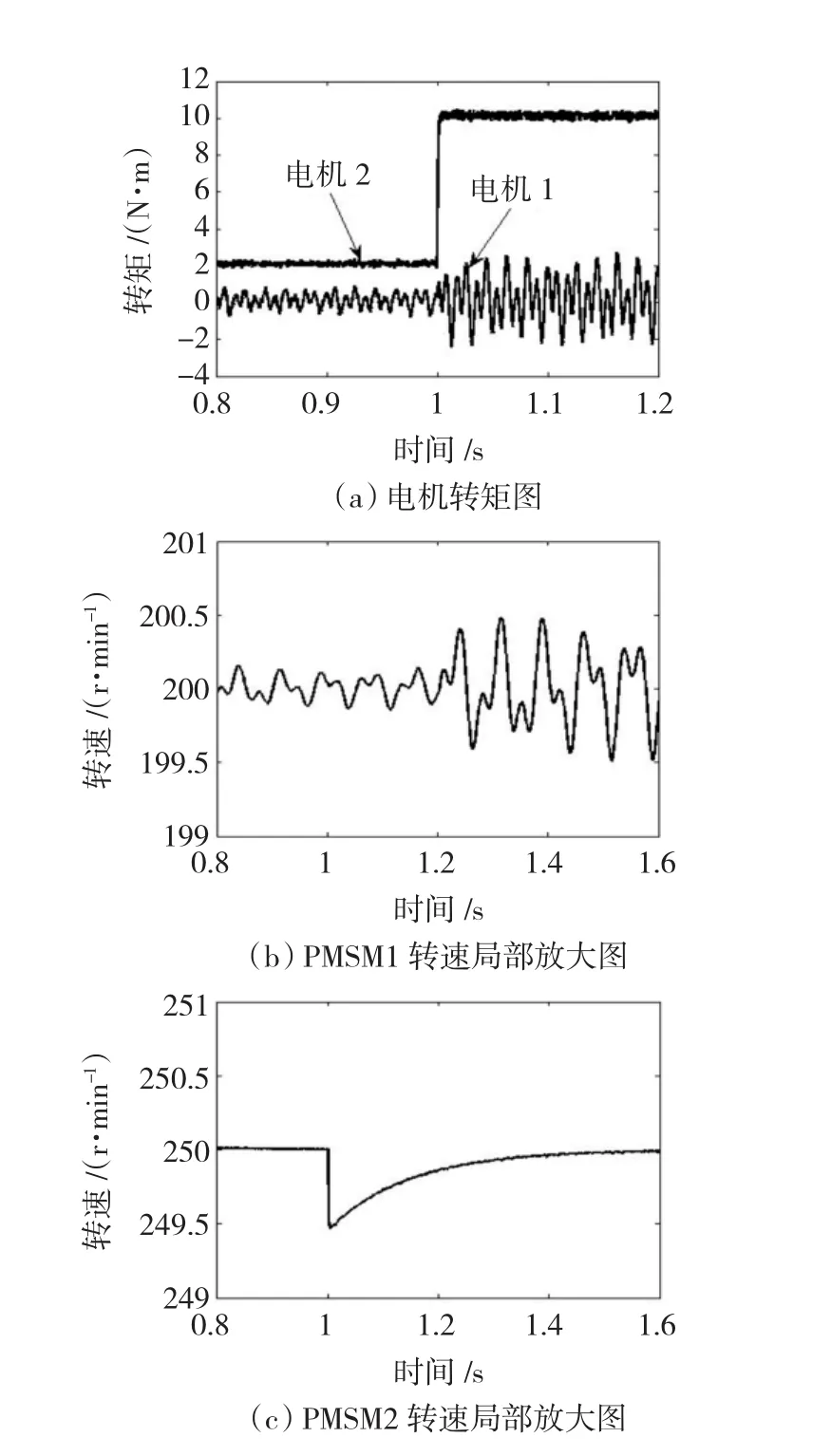
圖5 PMSM2變負(fù)載運(yùn)行Fig.5 Variable load operating of PMSM2
1)PMSM2的負(fù)載增大后,PMSM1的轉(zhuǎn)矩和轉(zhuǎn)速脈動(dòng)幅值都增大,即PMSM1的轉(zhuǎn)矩和轉(zhuǎn)速脈動(dòng)幅值受PMSM2的負(fù)載影響,脈動(dòng)頻率與PMSM2的負(fù)載大小無(wú)關(guān)。
2)PMSM2在1s負(fù)載增加后轉(zhuǎn)速小幅下降,并迅速恢復(fù)。且不含諧波的PMSM2負(fù)載變化時(shí),其自身的轉(zhuǎn)矩和轉(zhuǎn)速不存在任何脈動(dòng)。
PMSM1變速仿真如圖6所示:PMSM1含5、7次空間諧波,且空載運(yùn)行,初始給定為200 r/min,在0.9 s從200 r/min加速到350 r/min;PMSM2不含諧波,其負(fù)載為2 N·m,給定轉(zhuǎn)速為250 r/min。
1)PMSM1的轉(zhuǎn)速增加對(duì)PMSM2的轉(zhuǎn)速、轉(zhuǎn)矩均無(wú)影響,這說明不含空間諧波的PMSM2在該串聯(lián)系統(tǒng)中不受PMSM1的變速影響。
2)比較PMSM1變速前后的轉(zhuǎn)速圖,PMSM1的轉(zhuǎn)速增加使其轉(zhuǎn)速脈動(dòng)的頻率有所升高。
PMSM2變速仿真如圖7所示:PMSM1含5、7次空間諧波,且空載運(yùn)行,給定轉(zhuǎn)速為200 r/min;PMSM2不含諧波,其負(fù)載為2 N·m,在0.9 s從100 r/min加速到400 r/min。
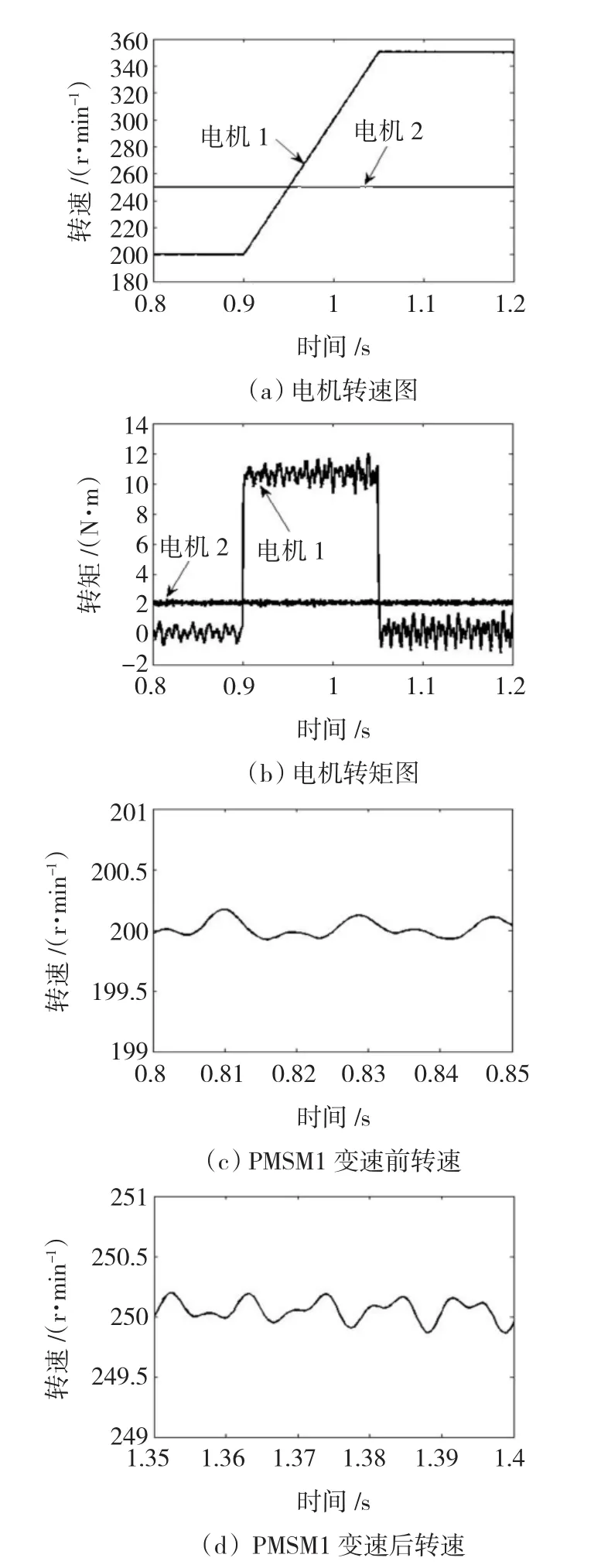
圖6 PMSM1變速運(yùn)行Fig.6 Variable speed operating of PMSM1
在PMSM2的轉(zhuǎn)速增加過程中,PMSM1的轉(zhuǎn)矩脈動(dòng)幅值和頻率均有所增大。但PMSM2的轉(zhuǎn)速和轉(zhuǎn)矩均不存在脈動(dòng)。
從以上仿真可以得出結(jié)論:
1)含5、7次空間諧波的PMSM1轉(zhuǎn)矩脈動(dòng)與PMSM2的負(fù)載大小有關(guān),脈動(dòng)頻率與PMSM1以及PMSM2的轉(zhuǎn)速都相關(guān),因此該串聯(lián)系統(tǒng)中PMSM1的運(yùn)行是不解耦的。
2)若PMSM2不含空間諧波,其運(yùn)行不受PMSM1變載變速的影響。因此,若實(shí)現(xiàn)該串聯(lián)系統(tǒng)中2臺(tái)電機(jī)的解耦運(yùn)行,每臺(tái)電機(jī)均不能包含(6i±1)奇次諧波(i=1,3,5,…)。
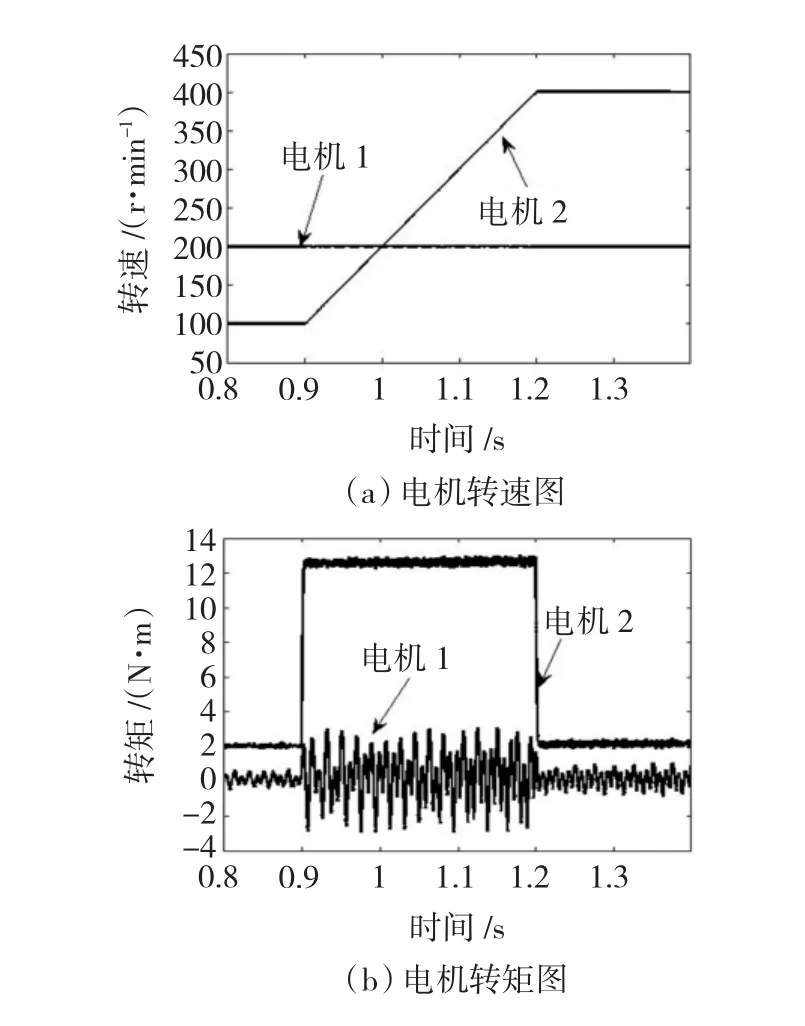
圖7 PMSM2變速運(yùn)行Fig.7 Variable speed operating of PMSM2
3 結(jié)語(yǔ)
為了分析電機(jī)高次空間諧波對(duì)串聯(lián)系統(tǒng)解耦運(yùn)行的影響規(guī)律,本文建立了雙Y移30°六相PMSM集中繞組函數(shù)的傅里葉變換式,利用PMSM1高次諧波與PMSM2基波電流耦合的磁動(dòng)勢(shì)關(guān)系式,分析了不同類別的高次諧波對(duì)串聯(lián)系統(tǒng)解耦運(yùn)行的影響規(guī)律,建立了該串聯(lián)系統(tǒng)的數(shù)學(xué)模型并進(jìn)行了變速、變負(fù)載仿真,提出了串聯(lián)系統(tǒng)多相PMSM定子繞組必須為正弦波分布的必然要求,為電機(jī)的優(yōu)化設(shè)計(jì)及空間諧波補(bǔ)償?shù)慕怦羁刂铺峁├碚摶A(chǔ)。
[1]LEVI E.Multiphase electric machines for variable-speed applications[J].IEEE Transactions on Industrial Electronics,2008,55(5):1893-1909.
[2]LEVI E,JONES M.A novel concept of a multiphase multimotor vector controlled drive system supplied from a single voltage source inverter[J].IEEE Transactions on Power Electronics,2004,19(2):320-335.
[3]LEVI E,JONES M,VUKOSAVIC S N,et al.Operating principles of a novel multiphase multimotor vector-controlled drive[J].IEEE Transactions on Energy Conversion,2004,19(3):508-517.
[4]IQBAL A,LEVI E.Space vector PWM for a five-phase VSI supplying two five-phase series-connected machines[C]//12th International Power Electronics and Motion Control Conference,August 30-September 1,2006,Portoroz,Slovenia.2006:222-227.
[5]LEVI E.Even-phase multi-motor vector controlled driver with single inverter supply and series connection of stator windings[J].IEE Proceedings-Electric Power Applications,2003,150(5):580-591.
[6]SEMAIL E,LEVI E,BOUSCAYROL A,et al.Multi-machine modeling of two series connected 5-phase synchronous machines:effect of harmonics on control[C]//European Conference on Power Electronics and Applications,September 11-14,2005,Dresden,Germany.2005:1-10.
[7]LEVI E,JONES M,VUKOSAVIC S N,et al.Stator winding design for multi-phase two-motor drives with single VSI supply[C]//International Conference on Electrical Machines,September 2-5,2006,Chania,Greece.2006:CD-ROM Paper No.OMM2-1.
[8]艾永樂,王玉梅,KAMPER Marrten.梯形波相電流控制的六相感應(yīng)電機(jī)建模與控制[J].電機(jī)與控制學(xué)報(bào),2012,16(3):71-76.
AI Yongle,WANG Yumei,KAMPER Marrten.Modeling and controlling of six-phase induction machine driven trapezoidal phase current waveform[J].Electric Machines and Control,2012,16(3):71-76.
[9]彭兵,王成元,夏加寬.六相永磁力矩伺服電機(jī)氣隙磁場(chǎng)優(yōu)化[J].電機(jī)與控制學(xué)報(bào),2011,15(12):39-42.
PENG Bing,WANG Chengyuan,XIA Jiakuan.Air-gap magnetic field optimization for six-phase permanent magnet torque servo motor[J].Electric Machines and Control,2011,15(12):39-42.
[10]楊金波,楊貴杰,李鐵才.雙三相永磁同步電機(jī)的建模與矢量控制[J].電機(jī)與控制學(xué)報(bào),2010,14(6):1-7.
YANG Jinbo,YANG Guijie,LI Tiecai,Modeling and vector control for dual three-phase PMSM[J].Electric Machines and Control,2010,14(6):1-7.
[11]歐陽(yáng)紅林,成蘭仙.多相永磁同步電機(jī)模糊神經(jīng)網(wǎng)絡(luò)控制調(diào)速系統(tǒng)[J].電機(jī)與控制學(xué)報(bào),2007,11(2):111-115.
OUYANG Honglin,CHENG Lanxian.Multiple phase permanent magnet synchronous motor speed control system based on fuzzy neural network control[J].Electric Machines and Control,2007,11(2):111-115.
[12]趙品志,楊貴杰,李勇.三次諧波注入式五相永磁同步電機(jī)轉(zhuǎn)矩密度優(yōu)化[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,30(33):71-77.
ZHAO Pinzhi,YANG Guijie,LI Yong.Torque density optimization for five-phase PMSM with third harmonic injection[J].Proceedings of the CSEE,2010,30(33):71-77.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32