永磁同步平面電動機的滑模控制器設計
2014-09-20 06:07:24王麗梅鄭浩賈啟
電機與控制學報 2014年7期
王麗梅, 鄭浩, 賈啟
(1.沈陽工業大學電氣工程學院,遼寧沈陽 110870;2華晨寶馬汽車有限公司,遼寧沈陽 110044)
0 引言
許多傳統的機械定位平臺,多采用交叉軸型或龍門架型,由旋轉電機配合傳動機構驅動。而現代平面電機則是采用直線電機直接驅動的單層機械結構,按驅動用直線電機執行器的種類,可將平面電機劃分為變磁阻型、感應型、永磁同步型3類,其中永磁同步平面電機在結構設計、控制精確度、推力密度、效率等方面具有明顯優勢,受到了學術界和工業界的廣泛關注[1]。同采用旋轉電機和直線電機疊加的傳統XY平臺相比,采用平面電動機構造XY工作臺,具有直接驅動、結構簡單、無傳動機構、運動慣量小等特點,在現代制造裝備中,具有很大的應用潛力。
目前,永磁同步平面電動機多基于4組永磁同步直線電機組合的方式實現,通過協調控制各個直線電機的電磁力來控制平面電機,以產生動子平移運動所需的X向推力、Y向推力及動子偏轉所需的轉矩。文獻[2]研究了一種4組直線電機構成的平面電機,采用偽微分前饋控制實現三自由度的跟蹤控制。文獻[3]研究了一種4組直線電機構成的平面電機,采用基于狀態方程的極點配置方法設計三自由度的位置伺服控制算法,達到預期動、靜態指標。文獻[4]研究了一種4組直線電機構成的平面電機,采用基于狀態觀測器的PID控制策略實現平面電機的定位控制。滑模控制對于由外界干擾等不確定因素造成的系統結構變化有很強的抑制作用[5-6],干擾觀測器對外部擾動估計并進行補償[7],應用在直線電機的位置控制中可以獲得較高的控制精度和魯棒性,但在平面電機上的應用還很少見[8-10]。
本文在合理假設的基礎上分析了平面電機的動力學模型,建立了平面電機的運動控制模型,采用基于干擾觀測器的二階滑模控制方法進行位置控制器設計,利用飽和函數代替傳統的切換函數,通過連續控制使滑模面及其時間導數在有限時間內趨近于零,削弱抖振的同時抑制不確定性因素對系統性能的影響,使平面電機定位精度達到高加工精度要求。
1 平面電機數學模型
由于動子在旋轉中產生的偏轉角對平面電機電磁特性的影響規律比較復雜,難以用簡單的數學方法描述,所以假設動子偏轉角很小,對各組直線電機電磁特性的影響忽略不計[3]。
1.1 平面電動機動力學分析
平面電機動子受4組直線電機推力的共同作用,作用點分別是每組永磁陣列的幾何中點,動力學模型如圖1所示。推力F1和F2與動子坐標系X0Y的X軸平行,推力F3和F4與動子坐標系X0Y的Y軸平行。動子采用氣浮軸承,由于動子和定子之間沒有直接接觸,所以動子與定子之間的摩擦力可以忽略,根據經典力學原理可以得到動子的運動方程為
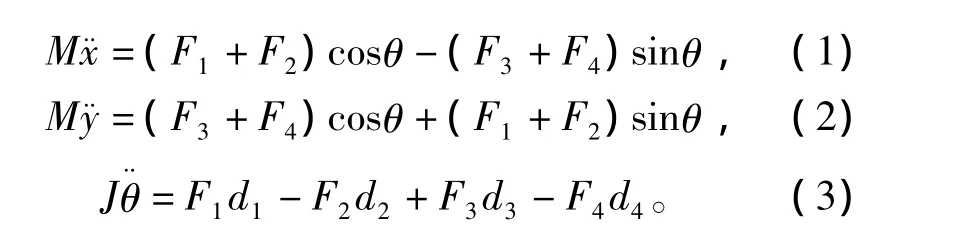

圖1 動子受力分析Fig.1 The mover force analysis
其中:M和J分別為動子的質量和轉動慣量;θ為動子繞Z軸的偏轉角,d1、d2、d3、d4為各推力與相應平行坐標軸之間的距離。
1.2 永磁同步直線電機電磁力模型
假設永磁同步平面電機中所用永磁同步直線電機的性能均一樣,由直線電機理論可知,永磁同步直線電機的電磁推力為

式中:id、iq、Ld、Lq分別為dq軸電流和電感;ψf為永磁體有效磁鏈;τn為極距。
為有效產生推力,采用id=0的矢量控制,則直線電機推力模型簡化為
在利用動力學模型控制x、y、θZ方向運動時,電機推力、動子位置和執行器電流三者緊密相關,機電耦合過于復雜。為解決上述問題,在控制電機電流時無需考慮動子位置的微小變化,可以對3個自由度進行單獨控制。
2 基于干擾觀測器的滑模位置控制
永磁同步平面電機三自由度位置控制結構圖如圖2所示。
三自由度指令信號經過坐標變換得到4組直線電機的位置指令,位置控制器產生控制信號,各直線電機產生的電磁推力共同作用在永磁同步平面電機動子上,使動子向指定位置運動,完成平面電機的位置控制。
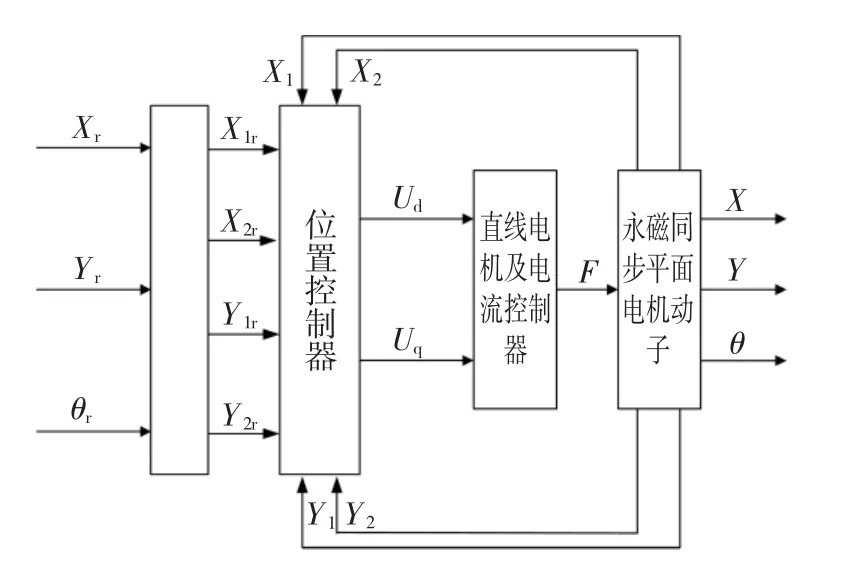
圖2 位置伺服控制結構圖Fig.2 Block diagram of position servo control
2.1 控制器組成結構
基于干擾觀測器的滑模位置控制器由二階滑模位置控制器和干擾觀測器組成,如圖3所示。圖中Xr為位置參考輸入,d為等效干擾,N、M為歸一化的互質因子,ΔN、ΔM為系統不確定因素的歸一化互質因子,X為位置輸出,ζ為測量噪聲,us為滑模控制器輸出,u為控制輸入,虛框內為干擾觀測器部分,Q為低通濾波器,d^為干擾估計值。
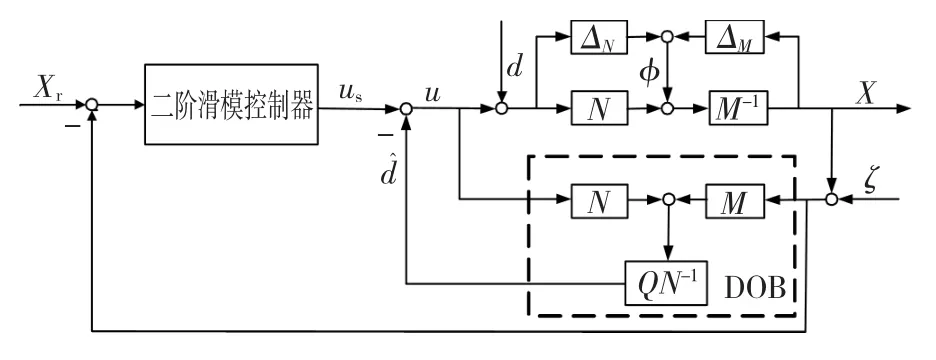
圖3 控制器組成結構圖Fig.3 Block diagram of the controller
2.2 干擾觀測器設計
由框圖可知,實際系統的傳遞函數為

系統的名義模型為

由圖3可以求出系統輸出對us、d、ζ和φ的傳遞函數為
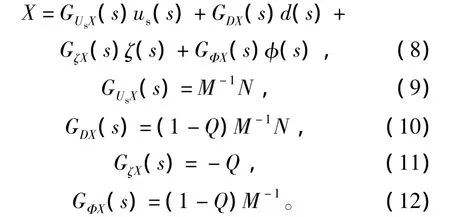
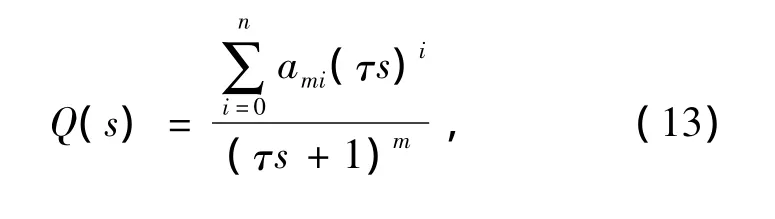
低通濾波器Q形式為

2.3 滑模控制器設計
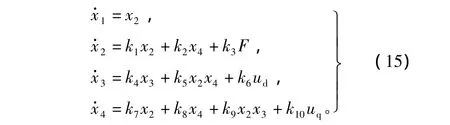
令狀態向量
x=[x1x2x3x4]T=[xvidiq]T,輸入u=[u1u2]T=[uduq]T,則永磁同步直線電機的數學模型可表示為為二項式系數,m為分母階數,n為分子階數。低通濾波器選擇有如下準則[11]:
準則1:隨著低通濾波器Q的分子階數增加,干擾抑制性能將得到提高,如果分子階數相同,分母階數越大干擾抑制性能越好;隨著低通濾波器Q相對階(m-n)增加,抑制測量誤差的性能將提高,如果相對階相同,分母階數越小抑制測量性能越好。
準則2:濾波器時間常數越小干擾抑制性能越好。
準則3:采樣時間T在低頻范圍內會影響干擾抑制效果。
綜合考慮干擾抑制性能、系統對測量噪聲的靈敏性和穩定性,取

定義滑模面向量

其中,c1為正常數。滑模面的一階和二階導數分別為


傳統超螺旋算法僅適用于相對階為1的系統,對于系統相對階為2的情況,本文采用一種改進的超螺旋算法,設計控制器使狀態軌跡在有限時間內螺旋式地收斂到原點,本文采用改進的超螺旋算法設計滑模控制器,此算法不需要計算滑模量導數及其符號信息,具有很強的魯棒性,改進超螺旋算法的控制定義為
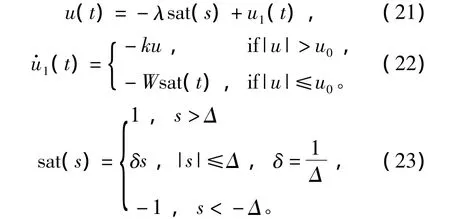
其中:sat(s)為飽和函數;λ、W、k、u0、Δ 都是正常數。有限時間內收斂到滑模面的充分條件為
其中,二階滑模位置控制器如圖4所示。
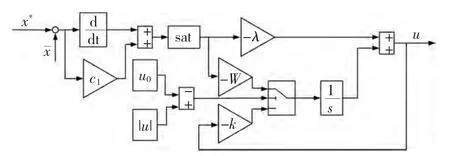
圖4 二階滑模位置控制器控制框圖Fig.4 Block diagram of second order sliding model position controller
3 仿真結果及分析
本文針對永磁同步平面電機采用4組同型號直線電機進行研究,采用MATLAB7.1進行仿真,采樣時間設定為0.000 1 s。電機參數為Rs=2.6 Ω,Ld=Lq=24.5 mH,τ=30 mm,kbemf=1.6 V·s/m,kf=1.6 N/A,p=3,M=2.8 kg。
經過多次實驗后,根據式(18)、(24)選定滑模控制器的參數為c1=35,λ=25,k=4,W=1,u0=2,Δ=0.05;干擾觀測器的參數τ=1 ms。
為了便于比較,對不加干擾觀測器的滑模控制系統也進行了仿真,系統在0.25 s時外加最大推力20%的階躍擾動,圖5為兩種控制方法對應的位置響應曲線。
由圖5可以看出,與滑模控制器相比,基于干擾觀測器設計的位置滑模控制器在突加擾動后系統響應超調較小,調整時間短,仍維持較高位置精度,具有很好的抑制作用,位置精度達到±0.1 μm,系統抗擾動能力較強,仿真結果表明基于干擾觀測器的二階滑模控制控制策略對于擾動具有較好的魯棒性。
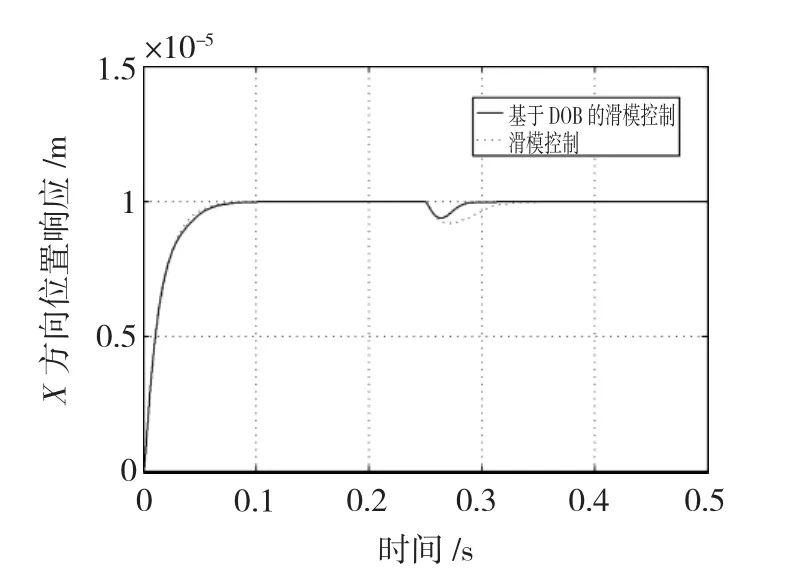
圖5 平面電機X方向階躍擾動下的響應曲線Fig.5 X direction step respond on the condition of step disturbance
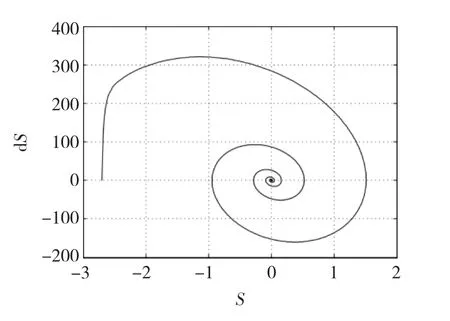
圖6 滑模變量S相軌跡Fig.6 Phase trajectory of sliding mode variableS
系統引入外界干擾后進行各自由度定位仿真實驗。X方向0.1 mm階躍響應如圖7所示,上升時間約為0.08 s,穩態誤差平均值小于0.3 μm;Y方向最大受擾振幅為0.5 μm;θ方向最大受擾振幅為0.02 m·rad。
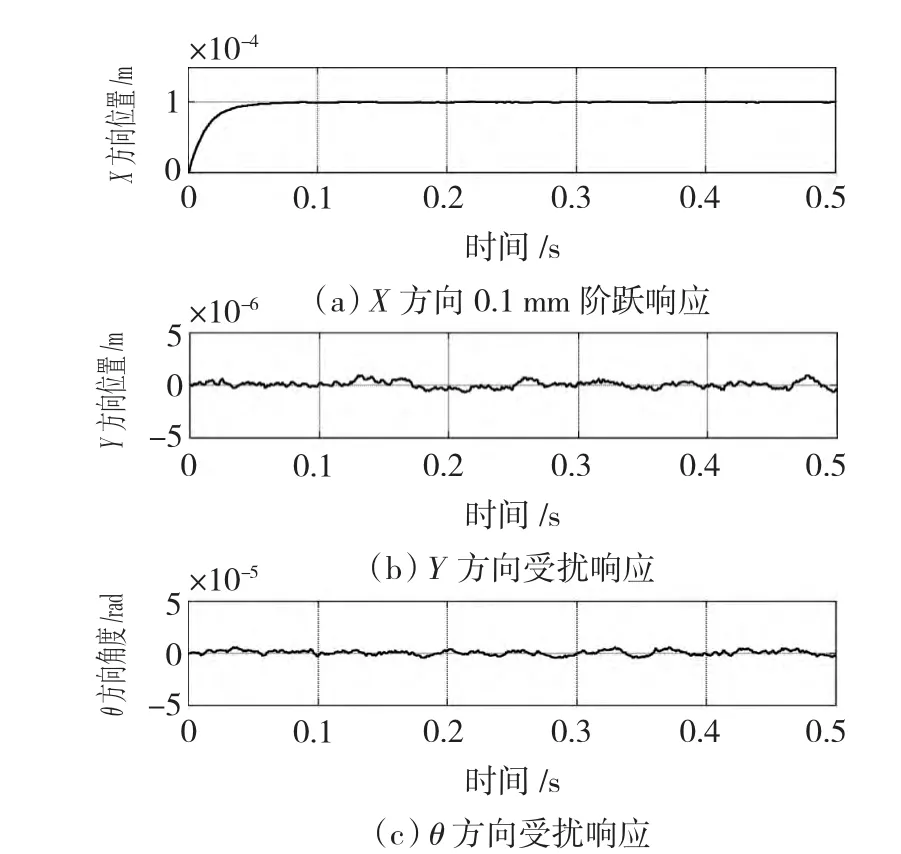
圖7 X方向階躍響應Fig.7 X direction step response
θ方向1 m·rad階躍響應如圖8所示,上升時間約為0.07 s,穩態誤差平均值小于0.01 m·rad;X方向最大受擾振幅為0.48 μm;Y方向最大受擾振幅為0.5 μm。
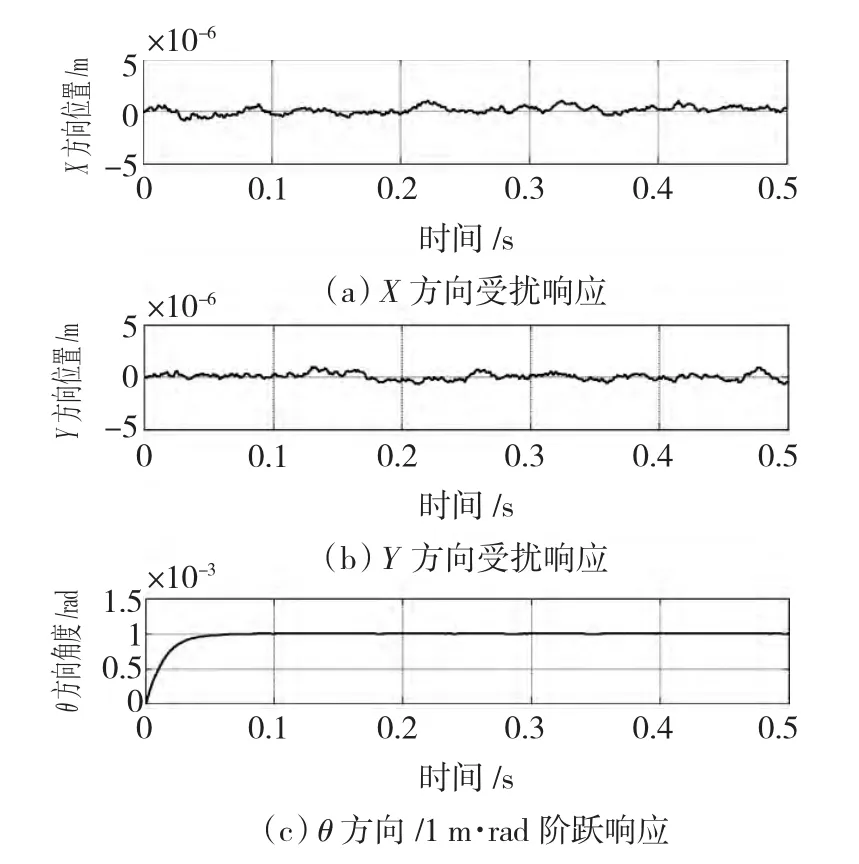
圖8 θ方向階躍響應Fig.8 θ direction step response
圖9為平面電機三自由度同時定位響應曲線,X、Y方向0.1 mm階躍給定指令,θ方向1 m·rad階躍給定指令,X方向階躍響應上升時間約為0.09 s,穩態誤差平均值小于0.45 μm;Y方向階躍響應上升時間約為0.08 s,穩態誤差平均值小于0.8 μm;θ方向階躍響應上升時間約為0.08 s,穩態誤差平均值小于0.07 m·rad。比較圖7和圖8可以看出,進行三自由度同時定位控制,各個自由度的動態特性和穩態特性與單自由度定位控制時基本保持一致。
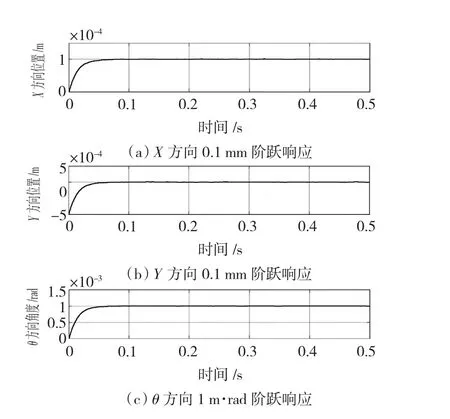
圖9 三自由度定位響應Fig.9 The three degree of freedom position response
4 結語
本文針對永磁同步平面電動機的結構特點,提出了基于干擾觀測器的滑模控制策略。設計了干擾觀測器,對外部擾動進行補償,設計了基于改進超螺旋算法的二階滑模位置控制器,干擾觀測器和滑模控制兩者相互補充,提高了系統的抗干擾能力和魯棒性。對系統進行單自由度定位和三自由度同時定位仿真實驗,仿真結果表明所采用的控制策略和控制算法使系統獲得較好的定位精度,同時具有良好的魯棒性和穩定性。
[1]周贛,黃學良.三自由度永磁同步平面電機的控制策略[J].電機與控制學報,2011,15(4):41-45.
ZHOU Gan,HUANG Xueliang.Control strategies of 3-degree-offreedom synchronous permanent-magnet planar motors[J].Electric Machines and Control,2011,15(4):41-45.
[2]YEN J Y,KUO F T,LEE M C,et al,Planar motion stage control using PDFF controller[C]//Proceeding of the 2011 9th World Congress on Intelligent Control and Automation,June 21-25,2011,Taipei,China.2011:749-752.
[3]曹家勇,朱煜,汪勁松.永磁同步平面電動機三自由度運動控制器[J].中國電機工程學報,2006,26(17):143-147.
CAO Jiayong,ZHU Yu,WANG Jingsong.A three degree of freedom motion controller for synchronous permanent magnet planar motors[J].Proceedings of the CSEE,2006,26(17):143-147.
[4]DEJIMA Shuichi,GAO Wei,KATAKURA Kei,et al.Dynamic modeling controller design and experimental validation of a planar motion stage for precision positioning[J].Precision Engineering,2005,29(3):263-271.
[5]劉金琨.滑模變結構控制MATLAB仿真[M].北京:清華大學出版社,2005:4-6.
LIU Jinkun.MATLAB Simulation for Sliding Mode Control[M].Beijing:Tsinghua University Press,2005:4-6.
[6]賈洪平,賀益康.永磁同步電機滑模變結構直接轉矩控制[J].電工技術學報,2006,21(1):1-6.
JIA Hongping,HE Yikang.Variable structure sliding mode control for PMSM DTC[J].Transactions of China Electrotechnical Society,2006,21(1):1-6.
[7]張代林,陳幼平,艾武,等.基于觀測器模型的直線電機干擾抑制技術的研究[J].中國電機工程學報,2007,27(12):14-18.
ZHANG Dailin,CHEN Youping,AI Wu,et al.Research on disturbance suppression technology for linear motors based on a disturbance observer Model[J].Proceedings of the CSEE,2007,27(12):14-18.
[8]孫宜標,郭慶鼎.基于推力觀測器的直線式交流伺服系統滑模變結構控制[J].電工技術學報,1998,13(2):1-5.
SUN Yibiao,GUO Qingding.Thrust observer-based sliding mode variable structure control for linear AC servo system[J].Transactions of China Electrotechnical Society,1998,13(2):1-5.
[9]孫宜標,楊雪,夏加寬.采用魯棒微分器的永磁直線同步電機二階滑模控制[J].中國電機工程學報,2007,27(33):6-10.
SUN Yibiao,YANG Xue,XIA Jiakuan.Second order sliding mode control for PMLSM using robust differentiator[J].Proceedings of the CSEE,2007,27(33):6-10.
[10]張前,黃學良,周贛.永磁同步直線電動機的位置滑模控制器設計[J].微特電機,2010,38(5):53-55.
ZHANG Qian,HUANG Xueliang,ZHOU Gan.Design of position servo controller based on sliding mode control for permanent magnet linear synchronous motors[J].Small&Special Electrical Machines,2010,38(5):53-55.
[11]YANG Kwangjin,CHOI Youngjin,CHUNG Wankyun,Performance analysis of discrete-time disturbance observer for second order systems[C]//Proceedings of the 42nd IEEE Conference on Decision and Control,December 9-12,2003,Maui,USA.2003,5:4877-4882.