基于觀測器的具外部擾動的離散時間系統的滑模控制
2014-10-16 07:21:28高存臣
中國海洋大學學報(自然科學版) 2014年3期
高 超,高存臣
(中國海洋大學數學科學學院,山東 青島266100)
滑模變結構控制的最大優點是對不確定參數和外部擾動具有不靈敏性,這一良好的性質對控制系統的設計帶來諸多好處,因而受到控制工作者的青睞,成為設計系統控制器的主要方法之一。自從Utkin V[1]提出滑模變結構以來,許多學者研究了滑模變結構的性質和設計方法。但是,目前大部分研究成果是在連續時域內得到的。隨著計算機技術的飛速發展和工業自動化等領域的實際需要,表述控制系統的模型不但有連續模型,而且還有離散模型,這就需要研究離散控制系統的性質與控制器的設計,因此用滑模變結構控制方法研究DTS的分析與設計問題具有重要的理論價值和實用價值。然而,由于采樣周期的影響,在連續時域內得到的滑模控制的某些性質卻并不適用于DTS。因此,許多學者開始研究DTS的切換流形與滑模控制器的設計方法[2-6]。
高為炳[7]提出了離散滑模控制的定義,并給出了DTS的趨近律。文獻[3]在文獻[2]的基礎上討論了利用離散趨近律設計不確定DTS的變結構控制問題,分析了離散趨近律造成系統顫振的原因,給出了改進的離散趨近律,并利用它設計了變結構控制律。文獻[8]討論了線性多變量離散不確定系統滑模變結構控制問題,并利用全程滑動模態的思想,通過構造切換函數,使系統的狀態軌線一開始便落在切換面上,縮短了到達時間,增強了系統的魯棒性。文獻[9]分別提出了積分型變結構控制和積分型滑模控制技術。然而,在上述文獻中,關于控制器的設計都是在假設系統的狀態可觀測的條件下完成的,但在實際應用中,這個假設不一定總是成立的,因此一個很自然的問題就是如何利用輸入、輸出的信息對系統實現狀態重構。文獻[10]針對未知輸入線性連續系統提出了全階觀測器的設計方案。文獻[11]針對未知輸入線性連續系統提出了降階觀測器的設計方案。文獻[12]提出了基于觀測器的MIMO連續時間系統的滑模控制器的設計方案。因此,對于狀態不可觀測的DTS,如何給出切換曲面與滑模控制器的設計方案便是一個需要解決的問題。
本文在文獻[10]的基礎上,針對上述問題,通過對DTS設計一種改進的狀態觀測器,研究DTS的穩定性。并將上述結果推廣到具有擾動的MIMO不確定DTS。改進后的方案具有設計方便,易于應用和收斂速度快等優點。然后針對外部擾動滿足匹配條件的DTS進行了控制器的設計。對外部擾動采用了擾動估計器[13]來估計擾動的值,這樣就不需知道擾動的上界,降低了對擾動的要求,增強了實際應用性。擾動估計器對滿足緩時變條件[9]的擾動的估計效果是很好的,特別是對常值擾動,可達到理想的預期。
1 觀測器的設計
考慮如下MIMO不確定DTS

其中:x∈Rn為系統的狀態向量;u∈Rm為控制向量;fRp為外部擾動向量;y∈Rq為系統的輸出向量;系數矩陣A∈Rn×n;B∈Rn×m;C∈Rq×n為已知的常值矩陣,且滿足rank(B)=m。
對系統(1),作如下假設:A1)矩陣對(A,B)完全可控;A2)矩陣對(A,C)完全可觀。
現在,構造系統(1)的觀測器如下:

其中:矩陣L∈Rn×q;E∈Rn×q;H ∈Rn×q待定;xe(k)為觀測到的狀態變量。定義

則有

如果令:
則

現確定矩陣H,E,L,G使得它們滿足(6)~(8)式。
首先由假設A2,(A,C)完全可觀,據對偶性原理[14],(A′,C′)完全可控,于是存在矩陣K ,使得 具有事先給定的極點,此時取

其次再來確定E。考慮如下2種情況
情形1 rank(CB)=q,且q=m。此時,CB可逆,
由式(8),可得

由式(7)和(11),有

由式(6)、(10)和(11),有

情形2 rank(CB)=q,且q<m。此時,存在非奇異矩陣Q,使得QCB=J[]0T,其中矩陣J∈Rp×p可逆,于是可得

其中α∈ Rn×(q-p)可任意確定。
當確定出矩陣E后,由式(7)可確定出

最后,經過適當選取E中的任意項α的元素,可確定出矩陣L。
注1 當rank(CB)<p時,式(8)沒有解,此時,觀測器是不存在的[10]。
注2 上述第二種情形下,通過式(14)計算E時,先不給任意項α賦值,然后結合式(6)和(10),適當的選取α,確定出矩陣L,最后再經過式(12)確定出G。
2 滑模面設計
考慮系統(1)的變結構控制問題。在變結構控制的設計中,滑模面的設計是1個非常重要的環節,1個好的滑模面可以保證系統有良好的動態品質。以下,基于上述的觀測器來設計滑模面。
引理1 在假設A1的條件下,如果存在列滿秩矩陣M ∈Rm×n,使得 MB 可逆,則A-B(MB)-1MA 有m個零特征值和n-m個非零特征值。
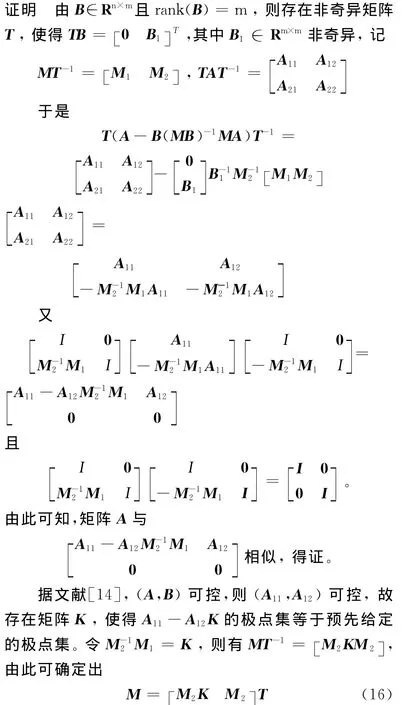
注3 由引理1,可選擇1個列滿秩矩陣M∈Rm×n,使得MB 可逆,并且A-B(MB)-1MA 具有穩定的極點[7]。
現在,選擇系統(1)的切換函數如下

考慮到狀態x(k)不可測,考察觀測器的xe(k)的狀態方程,由式(2)、(3)、(6)、(7)及(8)可得

或


可解出等效控制:

將式(20)帶入(1),可得系統(1)的滑模方程如下:

因此,由狀態x(k)和狀態誤差e(k)所組成的閉環系統可描述為
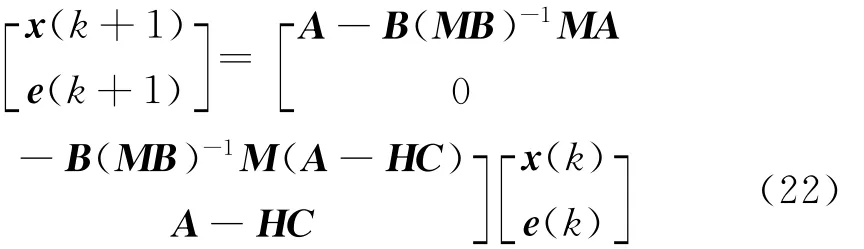
因為M和H 的選擇分別使得A-B(MB)-1MA和A-
3 滑模穩態分析及控制器設計
上述等效控制ueq中含有外部擾動項f(k),但實際中f(k)往往是未知的,所以ueq并不能實際應用。在對待未知外部擾動的問題中,以往文獻中的控制器是按它的上下界來設計的,也就是說按最壞情況來設計的,這樣系統就達不到削弱抖振的目的。本段中,先分析滑動模態的穩定性,然后對緩時變函數f(k),采用文獻[13]中的單位周期延遲的方法來估計f(k),并以此來設計控制器。

此時,設計控制器如下
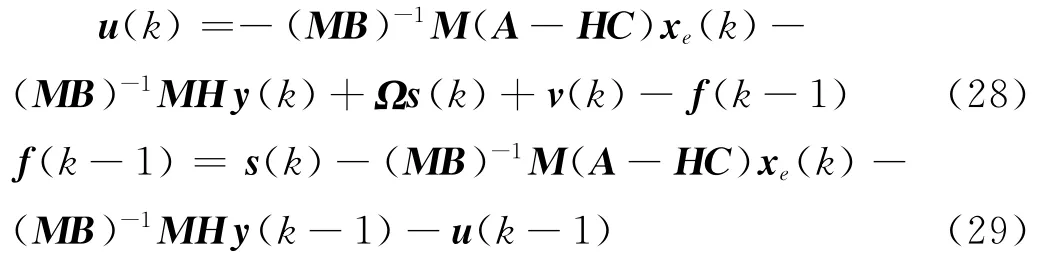
其中Ω=diag(q1,…,qm)∈Rm×m為對角矩陣,滿足條件控制輸入v(k)∈Rm稍后設計。式(18)兩邊同時左乘 (MB)-1M 并將式(28)代入,得到

注4 這里只需要知道外部擾動f(k)之差分的上界,而不要求知道f(k)的上界,即η,從而降低了對f(k)的要求。其中η是隨著采樣頻率增加而減小的。特別地,當f(k)為常值擾動時,則有f(k)=f(k-1),從而就得到了f(k)的精確估計。如果f(k)不是常值擾動,但滿足緩時變條件,那么由(29)得出的估計值也能達到精度要求。


4 數值仿真
對系統(1),取

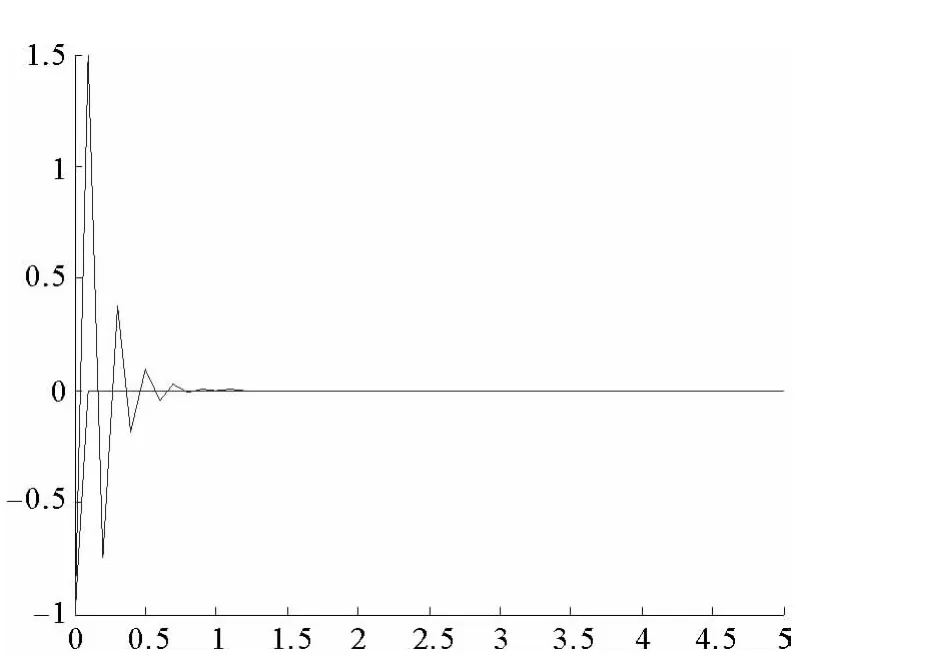
圖1 狀態誤差曲線Fig.1 State error curve
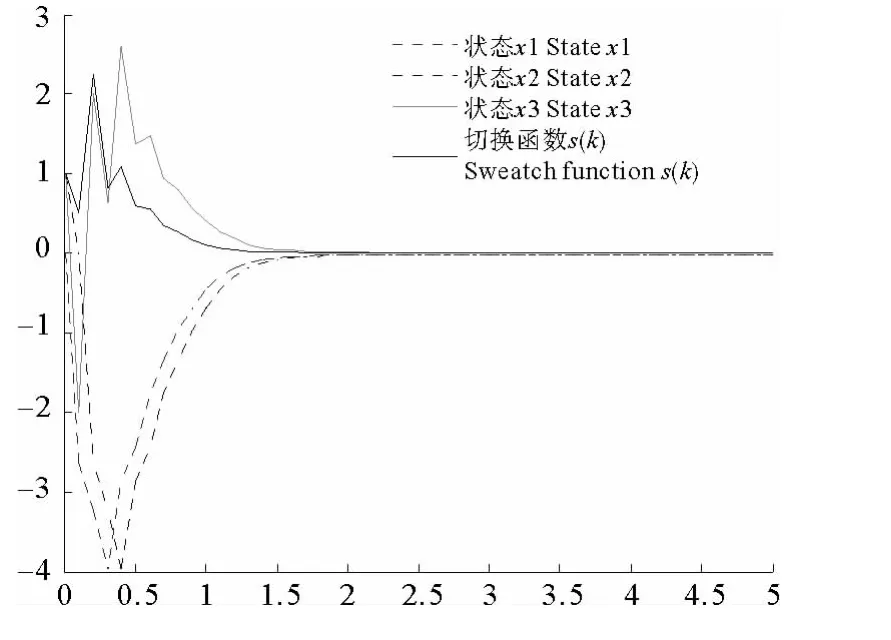
圖2 狀態變化曲線Fig.2 State change curve
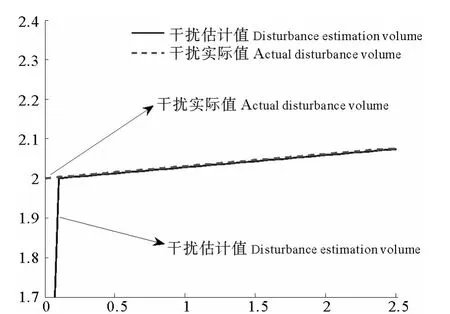
圖3 實際擾動及估計擾動曲線(放大后)Fig.3 Actual perturbation and disturbance estimation curve
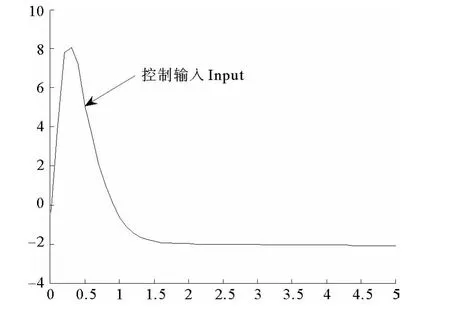
圖4 系統輸入曲線Fig.4 System input curve
5 結語
本文改進了文獻[10]中對帶有擾動的MIMO離散系統設計狀態觀測器方法,改進之后的方法計算更簡單有效。并根據觀測器的狀態方程設計了原系統的控制器,在設計控制器的過程當中,對滿足緩時變條件的外部擾動采用了單位周期延遲的方法來估計擾動項的值,仿真結果表明,本文中設計的方法收斂速度更快,而且有效地克服了系統中的抖動現象。
[1] Utkin V.Variable structure systems with sliding modes[J].IEEE Transactions on Automatic Control,1977,22(2):212-222.
[2] Gao Weibing,Wang Yufu,Homaifa A.Discrete-time varia ble structure control systems[J].IEEE Transactions on Industrial E-lectronics,1995,42(2):117-122.
[3] 翟長連,吳智銘.不確定離散時間系統的變結構控制設計[J].自動化學報,2000,26(2):184-192.
[4] Bartolini G,Ferrara A,Utkin V.Adaptive sliding mod e control in discrete-time systems[J].Automatica,1995,31(5):769-773.
[5] Eun Yongsoon,Kim Jung-Ho.Discrete-time variable structure controller with a decoupled disturbance compe nsator and its application to a CNC servomechanism[J].IEEE Transactions on Con-trol Systems Technology,1999,7(4):414-423.
[6] Cheng Chih-Chiang,Lin Ming-Hsiung,Hsiao Jia-ming.Sliding mode controllers design for linear diecrete-Time systems with matching perturbations[J].Automa-tica,2000,36(8):1205-1211.
[7] 高為炳.變結構控制的理論及設計方法[M].北京:科學出版社,1996:278-299.
[8] 米陽,李文林,井元偉,等.線性多變量離散系統全程滑模變結構控[J].控制與決策,2003,18(4):460-467.
[9] Pai MingChang.Robust tracking and model following of uncertain dynamicsystems via discrete-time integral sliding mode control[J].International Journal of Control,Automation and Systems,2009,7(3):381-387.
[10] Yang F,Wilde Rw.Observers for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1988,33(7):677-681.
[11] Hou M,Muller P C.Design of observers for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1992,37(6):871-875.
[12] Chang JeangLin.Discrete-time sliding mode controller design with state estimator and disturbance observer[J].Electrical Engineering,2007,89(5):397-404.
[13] Su WuChung,Drakunov S V.An boundary layer in sliding mode for sampled-data system[J].IEEE Transactions on Automatic Control,2000,45(3):482-485.
[14] 趙明旺,王杰,江衛華.現代控制理論[M].武漢:華中科技大學出版社,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
