光伏發電系統中基于STC89S51的單相全橋逆變器的設計及仿真
2014-10-21 20:04:55嚴峻劉輝
電子世界 2014年6期
嚴峻 劉輝
【摘要】本文設計一種光伏發電系統中由單片機控制的單相全橋逆變器,并通過仿真測試達到控制要求。采用全橋逆變結構、單極性SPWM倍頻調制的工作方式。經過反復測試,采用PWM法來計算SPWM波的占空比,并設計了控制器。以STC89S51作為控制芯片,采取KeilC和Proteus軟件進行軟件設計及聯合仿真,測試最終結果表明各模塊指標滿足設計目標要求。
【關鍵詞】光伏發電;STC89S51單片機;逆變器;PWM
一、引言
廣義的太陽能所囊括的范圍非常廣:地球上的水能、風能、海洋溫差能等都是來源于太陽;即使是地球上的化石燃料(如煤、天然氣、石油等)從根本上說也是遠古以來貯存下來的太陽能,狹義的太陽能則限于的光熱、光電和光化學的直接轉換。所以,太陽能作為一種清潔、可再生能源,其重要性無可取代。
光伏發電的基本原理是“光伏效應”。光線照射到金屬上,它的能量被金屬中的某個電子全部吸收,當電子吸收的能量足夠大時,就能克服金屬內部引力做功,從金屬表面逃逸出來,成為光電子。
太陽能光伏發電由于不受能源資料、原材料和應用環境的限制,具有最廣闊的發展前景,是各國最著力發展的可再生能源技術之一。歐洲聯合研究中心(JRC)對光伏發電未來發展做出了如下預測:2020年世界太陽能發電的發電量占世界能源需求的1%,2050年占到20%,2100年則將超過50%。
鑒于目前光伏發電的成本仍偏高,為了刺激光伏發電市場,世界各發達國家都制定了激勵政策:1、歐洲各國實施“上網電價”的光伏發電激勵政策;2、美國各州的激勵政策不同,大部分采用投資補貼、稅收優惠和“凈電表”法;3、日本實行安裝光伏發電系統時對初投資進行補貼法;我國自2005年頒布了《可再生能源法》后,又出臺一系列相關的配套政策。特別是近幾年,國家出臺了一系列促進光伏產業發展的政策措施,如:央行向分支機構及各銀行下發2014年的信貸政策中,光伏首次獲明確支持。各省市也積極響應,共計8省15市的太陽能補貼政策也相繼出爐。2013年,我國新增裝機量預計10GW,同比增長122%,居全球首位。
隨著人類對能源的需求不斷的增加和日益凸顯的環境問題之間的矛盾逐漸激烈,清潔、可再生的太陽能的充分利用就顯得前所未有的重要。而光伏發電系統的三大基本部件是:由太陽電池板(組件)、控制器和逆變器。因此逆變器的研究成為了光伏發電系統設計的核心問題。
二、硬件系統設計
1.逆變電路
光伏逆變器是光伏發電系統的關鍵部件,它的主要作用是將光伏電池板發出來的直流電轉換成交流電,若是并網逆變器,則要轉化成與電網同步的交流電。本文采用的逆變拓撲電路為全橋逆變電路。
2.驅動與濾波電路
逆變器驅動電路的功能。它輸出脈沖的幅值和波形與功率開關管的開關特性之間有密切關系,從而會影響整個逆變系統的效率和調節特性。
逆變部分采用全橋逆變拓撲,由場效應管構成逆變橋,STC89S51單片機產生的PWM信號通過與非門后,控制逆變橋中開關器件的ON與OFF,從而在逆變橋的輸出端產生正弦波。后續仍需LC濾波電路,得到平滑、不含高次諧波的標準正弦波。經過計算和反復測試,濾波電路中參數C=22?F,L=10mH。
3.PWM控制理論
PWM,脈沖寬度調制,是一種利用數字信號對模擬量進行控制的方法。在采樣控制理論中有一個重要的結論:沖量相等而形狀不同的窄脈沖加在具有慣性的環節上時,其效果基本相同。到目前為止,已出現了多種PWM控制技術,如等脈寬PWM法、SPWM法、等面積法等等。
4.控制電路
控制電路使用單片機STC89S51小系統開發板實現,包含以下功能模塊:USB電源供電模塊、DS1302時鐘模塊、LCD1602液晶模塊、LCD12864_TFT2.4彩屏顯示、6位共陰數碼管模塊、nRF905無線電通信接口、AD/DA模塊、IR1838紅外接收模塊、ISP燒寫接口、18B02溫度傳感器、5V穩壓芯片;32位I/O口線;RS232串口24C02存儲器、4X4矩陣鍵盤、、蜂鳴器等。在本設計中利用I/O并行端口P1.0腳作為PWM信號的輸出端來分別控制功率器件。
三、軟件及仿真系統設計
1.Proteus介紹
Protues軟件是英國Labcenter electronics公司出版的工具軟件。它是目前最好的仿真單片機及外圍器件的工具。其處理器模型支持8051、HC11、PIC10/12/16/18/24/30/DsPIC33、AVR、8086和MSP430等,2010年增加Cortex和DSP系列處理器,并持續增加其他系列處理器模型。在編譯方面,它也支持IAR、和MATLAB等多種編譯。
2.Keil?Vision2與Proteus ISIS軟件的聯合仿真
聯合仿真設置步驟如下:
(1)打開Keil uVision軟件,新建一個project,生成一個*.uv2文件。(2)用ADD FILES TO GROUP“source group 1”命令講寫好的程序源文件加載進來。(3)編譯、連接無誤后,生成.*hex文件。(4)打開Protues ISIS,繪制原理圖完畢。(5)雙擊芯片,將(3)中生成的*.hex文件路徑添加到“program file”選項中,即可仿真。
四、仿真調試
1.調試步驟:(1)調試驅動、逆變電路;(2)調試PWM模塊,觀察死區時間、上下橋臂的驅動信號是否互補;(3)通過編程使STC89S51產生SPWM波,由P1.0口輸出;(4)對主電路進行開環調試,觀察逆變器輸出波形。
2.調試結果與分析
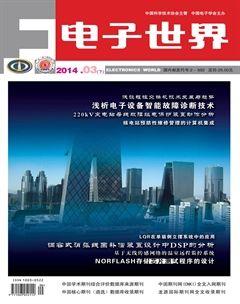
(1)驅動電路輸出波形
由單片機P1.0口輸出的驅動V1的波形如圖1所示。其他驅動信號波形與此相似此處省略。
(2)仿真數據分析
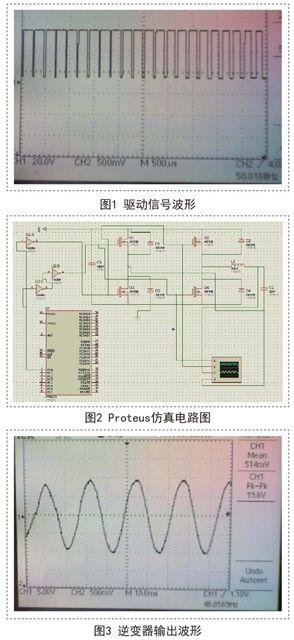
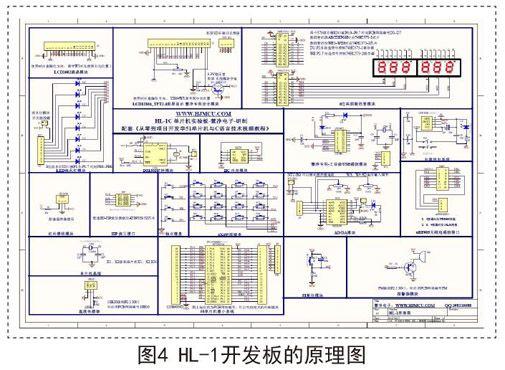
逆變系統仿真電路原理圖如圖2所示,由Proteus ISIS繪制。通過KeilC軟件編譯調試C語言源程序,,將生成的HEX文件加載到原理圖芯片STC89S51中,全速仿真,單片機的P1.0口線輸出SPWM波(單片機的定時/計數功能),并通過非門驅動后送給給功率器件,來控制功率器件的導通與關斷,逆變器輸出波形如圖3所示。由圖可見,正弦波周期基本滿足設計要求,波峰波谷有輕微的畸變。
圖1 驅動信號波形
圖2 Proteus仿真電路圖
圖3 逆變器輸出波形
五、結論
本文采用的全橋逆變電路系統結構,用IRF830A電力場效應管來實現。
圖4 HL-1開發板的原理圖
以STC89S51的單片機為主控芯片完成了逆變器的設計;借助于Proteus與KeilC軟件聯合仿真環境完成了軟件部分的設計,按照軟硬件的設計方案構建整個系統,并進行了軟硬聯調,結果表明逆變器運行結果符合設計目標要求。
部分程序
#include
#include
sbit port=P1^0;
unsigned char data m;
unsigned int data i=0;
unsigned char code led[200]={……};
main()
{
TMOD=0X01;
IE=0X82;
port=1;
m0=led[i];
TL0=256-m;TH0=0XFF;
TR0=1;
while(1)
{PCON=PCON|0X01;}
}
void timer0()interrupt 1 using 2
{port=~port;i++;
if(i==200)i=0;;
m=led[i];
TL0=256-m;TH0=0XFF;
……
}