基于擴展卡爾曼濾波的X射線脈沖星相對導航方法
2014-10-24 02:21:04夏紅偉刁雁華馬廣程王常虹
中國慣性技術學報 2014年5期
關鍵詞:卡爾曼濾波
夏紅偉,刁雁華,馬廣程,曹 卓,王常虹
(1. 哈爾濱工業大學 空間控制與慣性技術研究中心,哈爾濱 150001;2. 上海航天控制技術研究所,上海 200233)
基于擴展卡爾曼濾波的X射線脈沖星相對導航方法
夏紅偉1,刁雁華1,馬廣程1,曹 卓2,王常虹1
(1. 哈爾濱工業大學 空間控制與慣性技術研究中心,哈爾濱 150001;2. 上海航天控制技術研究所,上海 200233)
X射線脈沖星作為一種天然時間基準,具有良好的周期穩定性,在深空探測航天器自主導航方面具有重要的應用前景。針對絕對導航的整周模糊度求解問題和相對導航的預報相位、標稱軌道存儲問題,提出了一種改進的相對導航方法,將前一時刻的航天器位置作為相對導航基準,建立航天器軌道動力學模型,采用擴展卡爾曼濾波算法,確定航天器的位置。最后,進行了數學仿真研究,仿真結果表明:脈沖星相對導航改進方案的導航精度達到1 km,濾波器一致漸進穩定,能夠快速抑制初始誤差和軌道根數的干擾,驗證了導航方案的正確性和可行性。
深空探測;相對導航;X射線脈沖星;擴展卡爾曼濾波
X射線脈沖星具有良好的周期穩定性,作為一種天然時間基準,在深空探測航天器自主導航方面具有重要的應用前景[1]。目前國內的研究成果主要采用脈沖星絕對導航方式[2],圍繞整周模糊度的求解問題,提出了最小二乘法、空間搜索法和卡爾曼濾波方法[3-5]。前兩種方法的導航精度不高,且受軌道根數等因素的影響較大。卡爾曼濾波方法將系統模型線性化,影響了導航精度。此外,針對深空探測自主導航問題,航天器無法借助外界信息,因此絕對導航中的預報相位和標稱軌道等相關數據需要預先存儲在計算機內部,占用了大量的存儲單元,在工程實踐中難以實現。
鑒于絕對導航在工程實踐中存在的問題,相對導航定位方法成為是脈沖星導航的主要發展趨勢,通過改變導航基準,在不影響導航精度的前提下,簡化了軌道動力學模型。Emadzadeh提出了脈沖星相對導航的基本原理[6],Ray進一步分析確認了脈沖星相對導航的可行性[7]。Kim和Munoz基于擴展卡爾曼濾波,進行了脈沖星相對導航仿真,得到了較為理想的導航精度[8-9]。但是上述導航方法均選取地球質心作為導航基準,只適用于地球軌道航天器,而且使用量測相位與預報相位之差作為濾波算法的量測值,仍然沒有解決相關數據的存儲問題。
針對上述問題,本文提出了一種改進的脈沖星相對導航方法,選取前一時刻航天器的位置作為導航基準,采用擴展卡爾曼濾波確定航天器位置,避免了絕對導航方式中對整周模糊度的討論,解決了目前相對導航方案中的預報相位存儲問題。數學仿真分析結果表明,濾波估計結果與真實軌道具有高度的一致性,驗證了本文提出的導航方法的正確性和可行性。
1 相對導航
相對導航是以量測航天器與導航參考基準之間的相對距離、方位信息為基礎,進而確定出相對位置和姿態信息[10]。在脈沖星的絕對導航中,需要預先在星載計算機上注入預報相位數據,這會占用大量的存儲空間,增加導航系統的負擔。
脈沖星的相對導航方式選取航天器、地球質心、拉格朗日點或者太陽系行星等作為導航參考基準,確定航天器相對參考基準的位置信息。相對于絕對導航,脈沖星的相對導航方式在量測信息處理以及導航解算中的復雜度均有一定程度的降低。
鑒于脈沖星相對導航相比于絕對導航的優越性,本文提出了一種相對導航改進方法:①選取航天器前一時刻t- T的位置作為當前t時刻的相對導航參考基準;②根據脈沖星時間相位模型建立參考基準的相位傳播模型;③航天器上的星載原子時鐘輸出當前時刻的量測相位;④采用相關導航定位方法,解算得到航天器相對于非慣性系的位置。
以觀測單顆脈沖星為例,選取t- T時刻航天器的位置作為t時刻的相對導航參考基準,利用t- T時刻的量測相位 φ( t -T)結合脈沖星時間相位模型得到t時刻脈沖信號到達相對參考基準的預報相位φ( t|t -T)的傳播方程為:
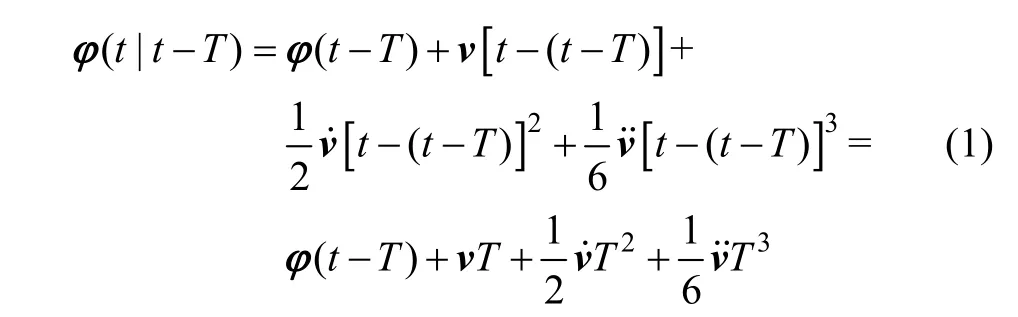
式中,φ( t -T)是t- T時刻的量測相位,φ( t|t -T)是根據 φ( t -T)得到的t時刻預報相位,v、v˙和v˙分別是脈沖信號頻率及其一階、二階導數,T是星載原子鐘的采樣時間。根據式(1),已知采樣時間T,便可以在線遞推解算得到預報相位 φ( t|t -T),不需要預先在星載計算機上存儲數據,節約了資源,且容易實現。
星載原子時鐘檢測到當前t時刻脈沖信號的到達相位 φ( t),結合預報相位 φ( t|t -T),根據式(2)計算得到的航天器當前時刻與參考基準的相對位置r,同時對多顆脈沖星進行天文觀測,就可以確定航天器的相對位置,其原理圖可用圖1表示。

以地球同步衛星為例,脈沖星的空間方位信息、信號周期、頻率及其各階導數均可經過長期的天文觀測得到,星載原子時鐘的采樣時間取10s,則相對距離約為31 000 m。 φ( t|t -T)與 φ( t -T)的相位差約為100,與 φ( t)的相位差約為10-4,均大于星載原子時鐘10-12的分辨率,可以被導航系統所辨識。因此本文提出的這種改進的脈沖星相對導航方法通過選取合適的相對導航參考基準,不再需要將時間信息統一在太陽系質心坐標系SSB,相對論效應引起的各種延遲可以互相抵消,解決了深空航天器預報相位的存儲問題,適合在工程實踐中使用。
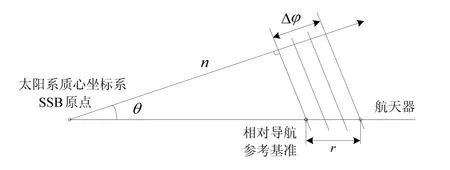
圖1 航天器的相對導航定位方式Fig.1 Spacecraft relative navigation
2 導航位置的濾波與解算
2.1 航天器動力學模型的建立
相對導航選取t- T時刻航天器的位置信息作為t時刻的導航基準,相對距離r和速度v作為狀態變量,建立軌道動力學模型:

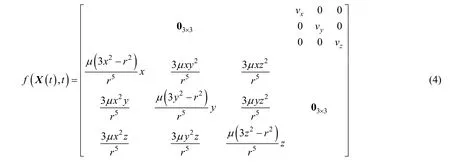
式中, η( t)是系統的高斯白噪聲;a是航天器的加速度,其中包括二體加速度、中心天體的非球項引力勢加速度、大氣阻力加速度、第三天體產生的引力加速度、加速度的高階小量等。對于地球軌道航天器,可以只考慮二體加速度,則 f( X (t),t)可以寫成:
對該非線性系統線性化和離散化處理,得到偏差狀態方程的離散形式:


2.2 量測方程
同時觀測n顆脈沖星,星載原子時鐘檢測到各個脈沖信號的到達相位為 φk,根據式(1), k-1時刻的脈沖相位最優估計為,結合脈沖星時間相位模型,計算得到k時刻脈沖信號到達相對導航參考基準的預報相位:

以量測相位 φk與預報相位之差 Δφk作為擴展卡爾曼濾波算法的量測值 Zk,構造量測方程。根據相對導航理論,保證整周模糊度降低為0,結合式(2),可以得到量測方程:


2.3 定位信息解算
擴展卡爾曼濾波(Extened Kalman Filter, EKF)是圍繞最優狀態估計的非線性濾波,分為“預測+更新”兩個階段。擴展卡爾曼濾波本質上是通過一階泰勒近似,對非線性系統先后進行線性化和離散化處理的最小方差估計,遞推方程如下:
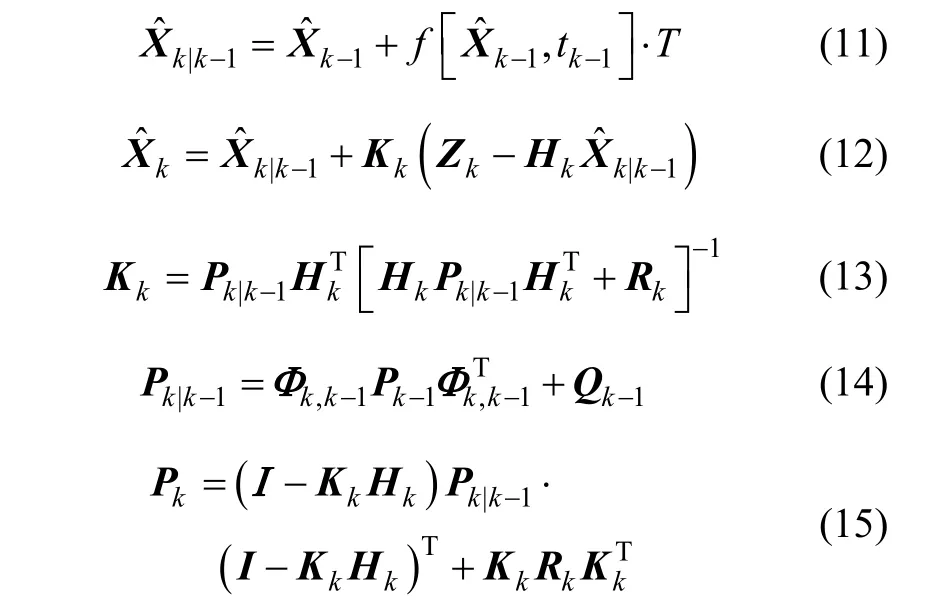
式中,P是狀態誤差方差矩陣,K是濾波增益矩陣。
根據2.1節的軌道動力學模型和2.2節的量測方程,結合EKF算法,解算得到航天器當前位置的最優估計以及脈沖相位的最優估計,進一步由式(1)計算得到下一時刻的預報相位:

注:本文提出的上述基于EKF的脈沖星相對導航屬于最優估計問題,不需要借助標稱軌道作為參考基準,將相對導航與擴展卡爾曼濾波相結合,解決了目前脈沖星導航中存在的預報相位和標稱軌道的存儲問題,便于工程實現。
3 相對導航仿真與分析
3.1 仿真結果
為了證明本文提出的基于 EKF的脈沖星相對導航改進方案的正確性和可行性,對典型地球軌道航天器進行數學仿真。以近地軌道、中高軌道和地球同步軌道為例,軌道根數如表所示,天文參數如表2所示。
選取前一時刻航天器位置作為導航基準,由于航天器速度有限,相對距離必定小于一個脈沖波長,保證了整周模糊度 ΔN = 0。
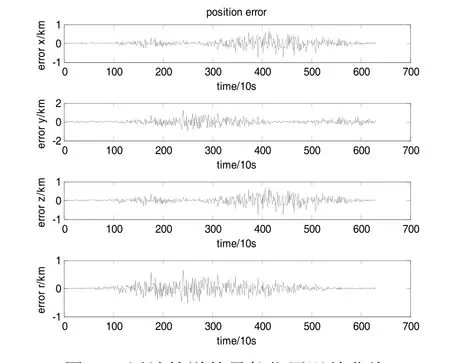
圖2 a 近地軌道的導航位置誤差曲線Fig.2 a Position error curves of the low orbit
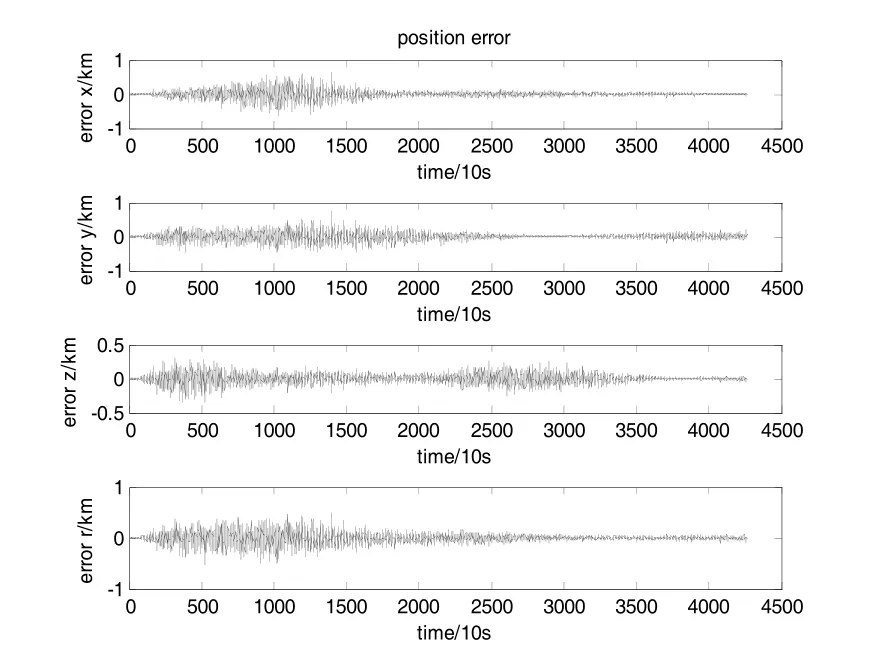
圖2 b 中高軌道的導航位置誤差曲線Fig.2 b Position error curves of the high orbit
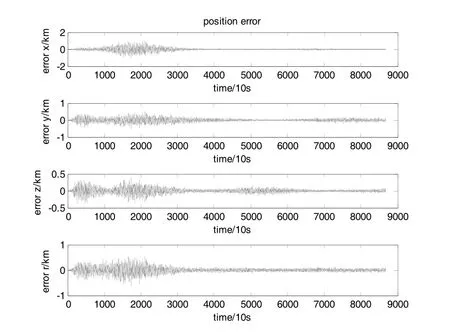
圖2 c 地球同步軌道的導航位置誤差曲線Fig.2 c Position error curves of the geosynchronous orbit
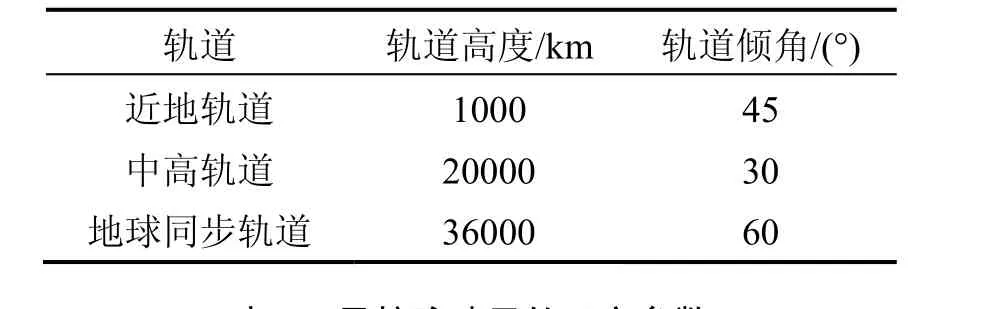
表1 典型地球軌道的軌道根數Tab.1 Orbital root numbers of the orbits
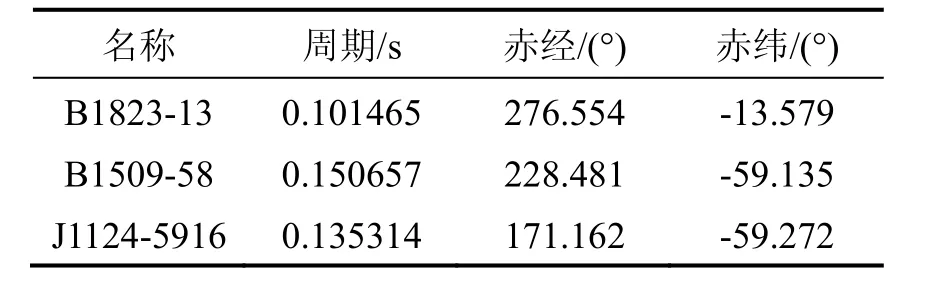
表2 導航脈沖星的天文參數Tab.2 Celestial parameters of the pulsars

利用上述仿真數據,進行導航解算,得到航天器位置的最優估計與真值的誤差曲線如表3和圖2所示。

表3 地球軌道的導航精度Tab.3 Navigation accuracy of the orbits
3.2 濾波分析
① 可控性分析
根據古卓夫科夫可控性判據定理,如果過程噪聲統計特性矩陣Q正定,若滿足式(17),則導航系統是完全隨機可控的:

基于 EKF的脈沖星相對導航改進方案數學仿真中,系統的過程噪聲滿足高斯白噪聲特性,Q陣是正定矩陣。將上述地球軌道的系統方程矩陣Φ和Γ代入,均滿足等式(17),說明所建立的導航系統是可控的。
② 可觀測性分析
采用奇異值分析方法,構造系統的可觀測性矩陣M,如式(18)所示:

如果可觀測性矩陣M的奇異值均不為0,則系統是完全隨機可觀測的。
構造上述地球軌道的可觀測性矩陣M,計算相應的奇異值,如表4所示。可以看出,三條軌道的奇異值均大于0,并且奇異值越大,可觀測性越好。
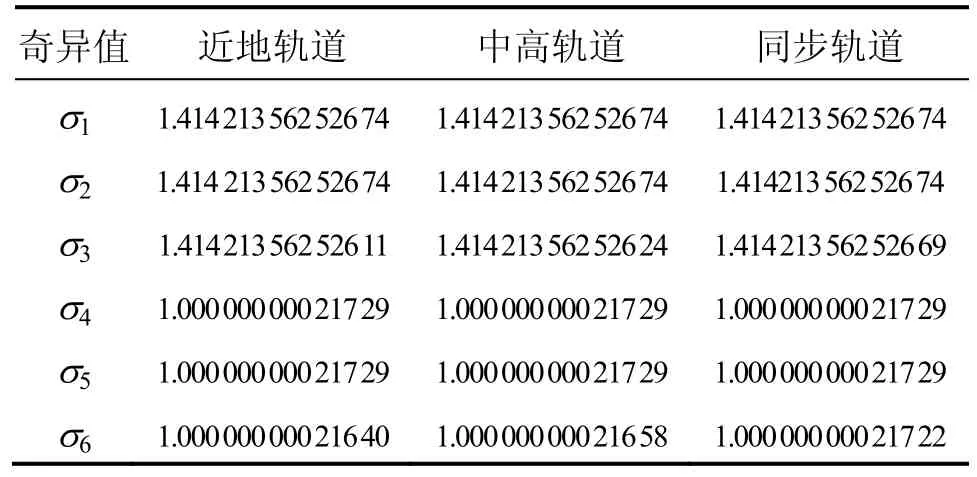
表4 可觀測矩陣的奇異值Tab.4 Singular values of the observability matrix
③ 穩定性分析
根據濾波穩定性定理:如果系統是完全隨機可控和完全隨機可觀測的,則EKF濾波器是一致漸進穩定的。
前面對導航系統的可控性和可觀測性的討論表明,本文提出的相對導航改進方案均滿足完全隨機可控和完全隨機可觀測的性質,所以隨著時間的增長,濾波狀態變量X及其誤差方差陣P都不受所選初值的影響,濾波器一致漸進穩定。
3.3 導航精度分析
① 初始誤差對導航精度的影響
以近地軌道為例,不改變其他參數,初始位置誤差分別取1 km、2 km和5 km,所得航天器位置誤差曲線如圖3a所示。可見,EKF能夠快速修正初始誤差,也就是說初始誤差對導航精度沒有影響。
② 軌道高度對導航精度的影響
在不改變其他參數的條件下,考察三條典型軌道的導航精度,如圖3b所示。可以看出,軌道高度對導航精度的影響不大,三個地球軌道航天器的導航精度均為1km。
③ 軌道傾角對導航精度的影響
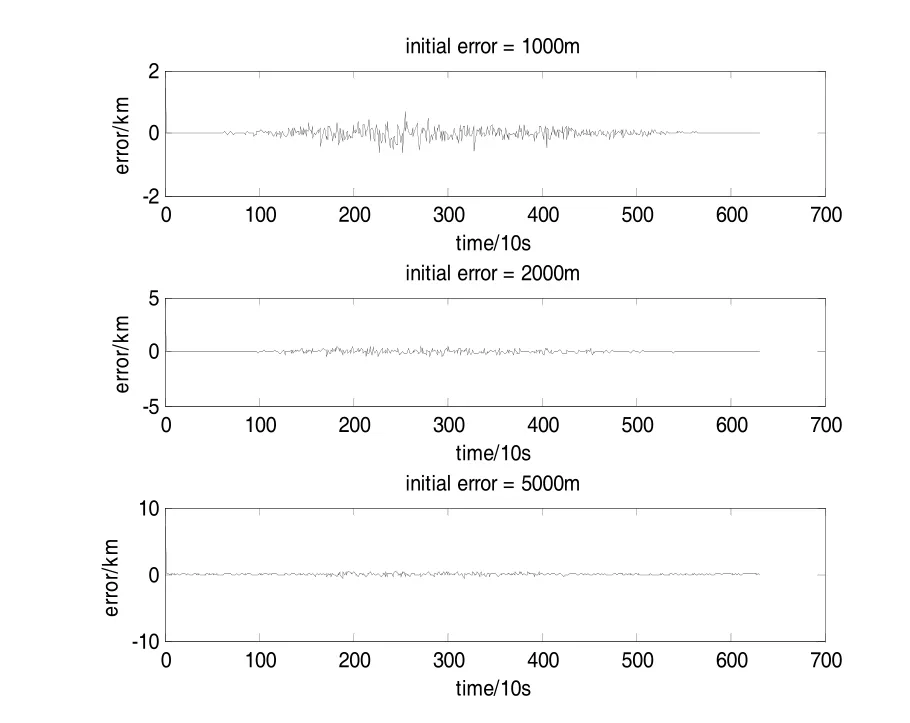
圖3 a 1 km、2 km、5 km初始誤差的位置誤差曲線Fig.3 a Position error curves with initial position errors of 1 km, 2 km and 5 km
以近地軌道為例,分別考察30°、45°和60°的軌道傾角對導航精度的影響,如圖3c所示。可以看出,軌道傾角對精度影響也不大,導航精度均為1 km,結合上述分析,說明基于EKF的脈沖星相對導航改進方案能夠較好抑制軌道根數的干擾,獲得較高的導航精度。

圖3 b 不同軌道高度下的位置誤差曲線Fig.3 b The position error curves with various orbit altitudes
4 結 論
本文提出了一種改進的基于擴展卡爾曼濾波的脈沖星相對導航方法,選取前一時刻航天器的位置作為相對導航基準,建立了預報相位的傳播模型,避免了絕對導航方式中對整周模糊度的討論,解決了目前相對導航方案中的預報相位和標稱軌道存儲問題。結合典型地球軌道航天器,進行了數學仿真和導航精度分析,導航定位精度在1 km以內,能夠快速抑制初始導航誤差,不受軌道根數變化的影響,基本滿足大多數航天器的任務需求,驗證了導航方案的正確性和可行性。本文的研究作為脈沖星導航的一個新的嘗試,解決了深空探測航天器導航方案中存在的參考基準的選取、導航數據的存儲、導航定位解算等問題,在現有的脈沖星相對導航方案的基礎上做了新的改進,為后續的研究提供了新的思路和參考。
(
):
[1] 帥平,李明,陳紹龍,等. X射線脈沖星導航系統原理與方法[M]. 北京:中國宇航出版社,2009:16-22.
SHUAI Ping, LI Ming, CHEN Shao-long, et al. Principle and method of X-ray pulsars navigation system[M]. Beijing: China Astronautic Press, 2009: 16-22.
[2] 王超,黃顯核,謝力慧. X 射線脈沖星絕對定位法研究[J]. 宇航計測技術,2010,30(4):41-44.
WANG Chao, HUANG Xian-he, XIE Li-hui. Study of absolute position determination using X-ray pulsar[J]. Journal of Astronautic Metrology and Measurement, 2010, 30(4): 41-44.
[3] 桂先洲,黎勝亮,李志豪. 基于 X射線脈沖星絕對定位中的整周模糊度改進算法研究[J]. 國防科技大學學報,2010,32(3):33-36.
GUI Xian-zhou, LI Sheng-liang, LI Zhi-hao. Study of betterment arithmetic of ambiguity in absolution position based on X-ray pulsar[J]. Journal of National University of Defense Technology, 2010, 32(3): 33-36.
[4] 喬黎,劉建業,鄭廣樓,等. XNAV 算法及其整周模糊度確定方法研究[J]. 宇航學報,2009,30(4):1460-1465.
QIAO Li, LIU Jian-ye, ZHENG Guang-lou, et al. Study of the XNAV algorithm and the determination of the ambiguity [J]. Journal of Astronautics, 2009, 30(4): 1460-1465.
[5] 楊成偉,鄭建華. XNAV/UVNAV/SINS 組合導航在航天器軌道機動中的應用[J]. 中國慣性技術學報,2012,20(2): 200-204.
YANG Cheng-wei, ZHENG Jian-hua. XNAV/UVNAV/ SINS integrated navigation system in spacecraft orbital maneuver[J]. Journal of Chinese Inertial Technology, 2012, 20(2): 200-204.
[6] Emadzadeh A A, Speyer J L. Relative navigation between two spacecraft using X-ray pulsars[J]. IEEE Transactions on Control Systems Technology, 2011, 19(5): 1021-1035.
[7] Ray P S, Sheikh S I, Graven P H, et al. Deep space navigation using celestial X-ray sources[C]//Proc. ION 2008 National Technical Meeting. 2008: 101-109.
[8] Kim S G, Crassidis J L, Cheng Y, et al. Kalman filtering for relative spacecraft attitude and position estimation[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 133-143.
[9] Munoz S, Lightsey E G. A sensor driven trade study for autonomous navigation capabilities[C]//AIAA Guidance, Navigation, and Control Conference. 2011: 08-11.
[10] Hablani H B, Tapper M L, Dana-Bashian D J. Guidance and relative navigation for autonomous rendezvous in a circular orbit[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(3): 553-562.
X-ray pulsar relative navigation approach based on extended Kalman filter
XIA Hong-wei1, DIAO Yan-hua1, MA Guang-cheng1, CAO Zhuo2, WANG Chang-hong1
(1. Space Control and Inertial Technology Research Center, Harbin Institute of Technology, Harbin 150001, China; 2. Shanghai Aerospace Control Technology Institute, Shanghai 200233, China)
X-ray pulsar as a nature timing standard has excellent period-stability, and pulsar navigation has important application prospect. An improved relative navigation approach which selects the previous position as the navigation reference is presented to solve the integer ambiguity problem in absolute navigation and the storages problem of the phase and the nominal orbit in relative navigation. The information filtering is implied to estimate the precise relative position and velocity by stabling the orbit dynamics model. Finally, the simulations are performed, which show that the accuracy of the improved relative navigation reaches 1 km. The interferences of the initial error and the orbital elements are rapidly suppressed by the filter, which is uniformly asymptotically stabilized. The navigation program is verified to be valid and feasible.
deep space exploration; relative navigation; X-ray pulsar; extended Kalman filter
1005-6734(2014)05-0619-05
10.13695/j.cnki.12-1222/o3.2014.05.012
TL361
A
2014-05-12;
2014-08-11
國家自然科學基金資助項目(NSFC No.61304108);上海航天科技創新基金資助項目
夏紅偉(1979—),男,博士,主要從事飛行器控制及仿真技術方面的研究。E-mail:xiahongwei@hit.edu.cn
聯 系 人:王常虹(1961—),男,教授,博士生導師,主要研究方向為導航、制導與控制。Email:cwang@hit.edu.cn.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36