基于證據推理的慣性/景象匹配組合導航方法
2014-10-24 02:21:04郭元江
中國慣性技術學報 2014年5期
鄭 辛,孫 偉,李 群,郭元江
(北京自動化控制設備研究所,北京 100074)
基于證據推理的慣性/景象匹配組合導航方法
鄭 辛,孫 偉,李 群,郭元江
(北京自動化控制設備研究所,北京 100074)
針對傳統的慣性/景象匹配組合導航中出現的因誤匹配導致組合導航精度低的問題,設計了一種基于證據推理的慣性/景象匹配組合導航方法。在慣性/景象匹配組合導航中,使用證據推理對與景象匹配置信度相關的特征量進行融合計算,將融合計算得到的綜合信度作為組合導航量測更新的依據,以降低誤匹配對導航精度的影響。試驗結果表明該方法可行,組合導航精度相比傳統方法提高了25.9%。
證據推理;景象匹配;慣性導航;組合導航。
隨著飛行器長時間、遠程航行需求的不斷增強,對導航系統的精度和自主性要求不斷提高。純慣性導航系統的導航誤差隨時間積累而不斷增大,不能完全滿足實際應用的需要[1]。慣性/景象匹配組合導航可在不提高慣性元件精度的情況下,提升導航系統的導航精度,節約成本。
一般將景象匹配算法分為兩大類[2]:基于區域的算法和基于特征的算法。基于特征的匹配算法在尺度上具有一定的不變性,對相機的姿態要求不很高。但在實時圖與基準圖差異較大的情況下會產生大量的誤匹配點,或因匹配點數過少而無法對匹配結果進行判斷。基于區域的匹配算法包括灰度相關算法、相位相關算法等,在這類算法中,圖像的像素點陣直接參與匹配運算,灰度相關算法參與匹配的是圖像灰度強度點陣,并可計算出景象匹配的置信度,由置信度來對匹配結果進行判斷。
傳統景象匹配置信度研究存在缺陷[3],使用單一特征值來衡量匹配置信度,極有可能出現誤報;使用多個特征值來衡量匹配置信度,可能出現相互矛盾的情況。
本文針對應用歸一化灰度值匹配算法的景象匹配特點,使用衡量匹配置信度的兩個特征值。基于證據推理理論,將兩個特征值進行融合計算,獲得綜合信度,在減少誤報概率的同時增強置信度計算的準確性。在慣性/景象匹配組合導航中,使用綜合信度作為卡爾曼濾波器是否進行量測更新以及誤差修正的依據。
1 景象匹配算法與特征值分析
1.1 歸一化灰度值匹配算法
歸一化灰度值匹配法的本質是衡量兩幅圖像相似程度的度量準則。其過程是在基準圖中尋找與實時圖相關性最高的點作為匹配結果。
歸一化灰度值匹配算法的計算公式[4]為:

由于實時圖的拍攝條件與基準圖的拍攝條件存在較大差異,歸一化灰度值匹配算法得出的匹配結果可能產生誤匹配,需要一些特征值來評估景象匹配結果的準確性及剔除誤匹配結果。
1.2 特征值分析
1.2.1 信噪比SNR
實時圖和基準圖的相似度是體現景象匹配系統性能的重要因素之一。信噪比SNR(Signal Noise Ratio)是用來衡量兩圖之間的相似程度的重要指標。
實時圖是基準圖累加一定噪聲構成的,將基準圖定義成信號,則由天氣、圖像采集等因素對基準圖的影響就是噪聲。
通過大量試驗數據可獲得 SNR與景象匹配正確率的關系,結果如圖1所示。

圖1 SNR與正確率關系圖Fig.1 Relationship between SNR and accurate rate
1.2.2 次高峰與最高峰之比SMR
次高峰與最高峰之比SMR(Sub Max Ratio)定義為:

式中,CCSubMax表示次高峰的相關性,CCMax表示最高峰的相關性。該特征值表征的是基準圖中兩幅實時圖同時存在的概率,越大說明越容易發生誤匹配。
通過大量試驗數據可獲得 SMR與景象匹配正確率的關系,結果如圖2所示。
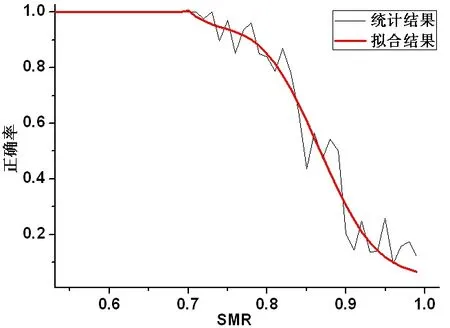
圖2 SMR與正確率關系圖Fig.2 Relationship between SMR and accurate rate
可見SMR與匹配正確率是負相關,當SMR小于0.7時,匹配正確率為100%,說明此時實時圖在基準圖中是獨特的。
用單一特征值評估景象匹配結果存在較大的風險,如圖1中SNR大于0.85時,正確率基本為100%,但是此時仍有可能出現誤匹配;而若條件過于苛刻,會將一些正確的匹配結果判定為錯誤的,即誤報概率較大。因此需要將特征值進行融合,以增加特征值評估的可靠性,降低誤報概率。本文基于證據推理理論,將兩種特征值的景象匹配置信度進行數據融合,求取綜合信度。
2 基于證據推理的綜合信度計算方法
2.1 傳統證據理論
證據推理理論作為認識不確定性的理論用于圖像匹配領域時,通過將復雜的問題分解為簡單的小問題,大證據分解為小證據,然后利用一些組合規則將這些小證據融合,從而得到整個問題的解[5-7]。
證據推理理論將對特征值的單一處理轉化為融合處理,它即強調特征值的客觀性又稱靜態性,又強調了特征值對景象匹配正確率估計的主觀性又稱動態性,一定程度上解決了可能發生的特征值估計景象匹配正確率高度沖突的融合問題。
本文認為特征值對景象匹配正確率估計的可靠度主要來自于特征值對應的景象匹配置信度的靜態權重及動態權重。

動態權重指一些特征值應用于景象匹配時所表現出的相互支持度,它以非直接的方式表現了特定特征值對應的景象匹配置信度的可靠性。當某一特征值被其它特征值支持的程度大,說明該特征值具有更大的可靠度,反之亦然。采用經靜態權重折扣后的特征值景象匹配置信度與加權平均景象匹配置信度的距離計算相似度、支持度和動態權重
設SMR特征值的序號為1,SNR特征值的序號為2。現介紹計算步驟:
1)給定各證據的靜態權重 ωi,這里設 ω1= 0.5, ω2= 0.5。

3)計算動態權重 si′:
4)依據飛行試驗條件和對特征值的認知確定靜態權重比例λ,并計算各特征值對應景象匹配置信度的綜合權重 ai:

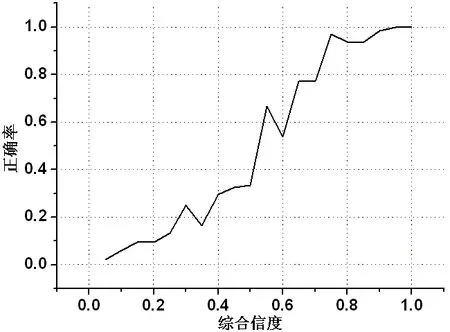
圖3 綜合信度與正確率的關系曲線Fig.3 Relationship between apprehensive credibility and the accurate rate
對景象匹配試驗數據進行統計,經過上述步驟的數據融合計算,可得出綜合信度與正確率的關系曲線,如圖3。可見經過數據融合,綜合信度大于0.9時,匹配正確率高于95%。
3 組合導航方法
通過證據推理獲得景象匹配的綜合信度后,即可進行組合導航計算。
3.1 狀態量定義
本文設計的基于證據推理的慣性/景象匹配組合導航方法其誤差來源主要包括3個方面:
1)慣導的導航誤差;
2)慣導的慣性器件誤差;
3)景象匹配的誤差。
在常規卡爾曼濾波中加入景象匹配導航誤差狀態量[8]:景象匹配的緯度、經度定位誤差,共選取 17個系統狀態:δVn,δVu,δVe,δL,δh,δλ,φn,φu,φe,▽x,▽y,▽z,εx,εy,εz,δLD,δλD。其中:δVn,δVu,δVe分別表示捷聯慣導系統北向、天向、東向的速度誤差;δL,δh,δλ分別表示捷聯慣導系統的緯度誤差、高度誤差、經度誤差; φn,φu,φe分別表示捷聯慣導系統導航坐標系內北、天、東三個方向的失準角;▽x,▽y,▽z分別表示捷聯慣導系統載體坐標系內X、Y、Z三個方向的加速度計零偏;εx,εy,εz分別表示捷聯慣導系統載體坐標系內X、Y、Z三個方向的陀螺漂移;δLD,δλD分別表示景象匹配的緯度、經度誤差。
3.2 系統狀態方程與量測方程定義
系統狀態方程為:

式中: X (t)為上述17個狀態; W (t)為系統白噪聲;系統矩陣 F (t)根據誤差方程求取。
現簡要描述 F (t)方程:

其中 Fvisual為景象匹配的誤差,采用一階馬爾科夫過程描述。

濾波器量測方程形式如下:

量測值Z為慣導系統和景象匹配分別給出的位置的差值,實際上是兩者誤差的差值:
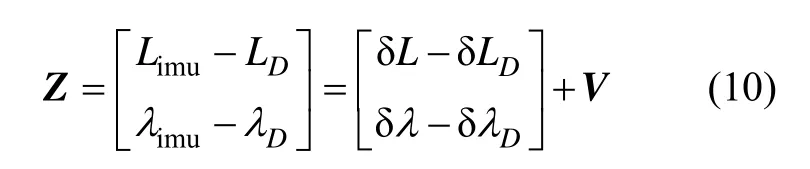
式中,V為量測噪聲,本方案考慮為白噪聲。

3.3 組合導航步驟
基于證據推理的慣性/景象匹配組合導航的基本步驟如下:
1)相關變量初始化,卡爾曼濾波器初始化;
2)開始導航解算,并計算系統狀態轉移矩陣
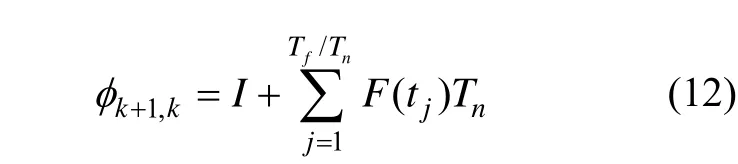
式中,I表示單位矩陣, Tf表示卡爾曼濾波周期, Tn表示導航周期。
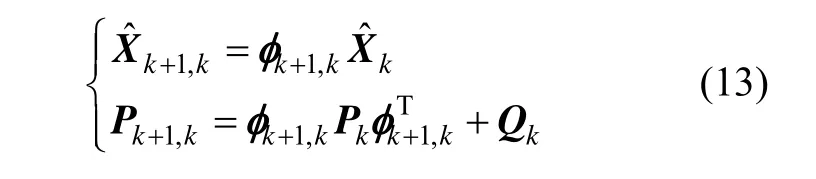
3)到達卡爾曼濾波周期時,進行時間更新:
4)進入景象匹配區域,獲取實時圖進行景象匹配,計算特征值SMR和SNR。


6)計算經靜態權重折扣后的證據與其加權平均證據的距離 di,計算公式見式(3)。



9)若進行量測更新,對估計出的系統誤差進行閉環修正,轉入步驟2);若未進行量測更新,直接轉入步驟2)。
4 試驗驗證與分析
4.1 試驗條件
試驗設備為:
● 慣性導航設備采用光纖捷聯慣導系統,陀螺漂移:0.03~0.05 (°)/h,加表零偏:100 μg。
● 可見光相機采用加拿大灰點公司的大黃蜂二代雙目相機,分辨率為640× 480,焦距為7.4 μm。
● 相機安裝方式如圖4(a)所示,慣性導航設備安裝方式如圖4(b)所示,且慣導的 zb軸與 xb、 yb軸為右手定則關系。

圖4 (a) 相機安裝方式Fig.4 (a) Installation of camera
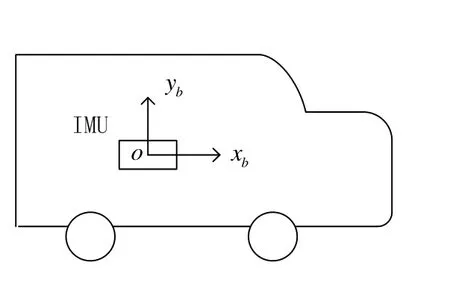
圖4 (b) 慣性導航設備安裝方式 Fig.4 (b) Installation of IMU
行駛軌跡如圖 5所示,匹配區大小為 2000 m× 2000 m,匹配區位置在圖5中標出。每次進入匹配區,進行10 s的慣性/景象匹配組合導航,組合導航周期為1 s,并對速度、位置、姿態誤差進行閉環反饋修正。
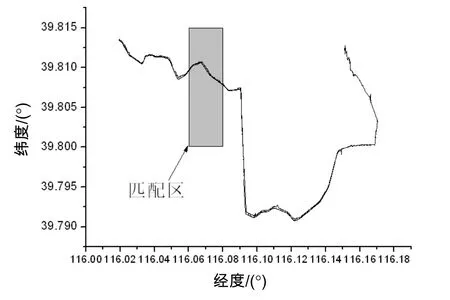
圖5 行駛軌跡Fig.5 Vehicle path
4.2 試驗結果
圖 6(a)表示試驗結果,分別使用傳統方法和本文提出的新方法進行慣性/景象匹配組合導航。由組合導航的徑向誤差曲線可知,載體經過3次景象匹配區域。圖6(b)為圖6(a)首次進入景象匹配區域的局部放大圖。
由圖6(b)可知,在景象匹配區,傳統方法對景象匹配結果的正確率判斷不準確,導致徑向誤差發生跳變。基于證據推理的慣性/景象匹配組合導航,首先對
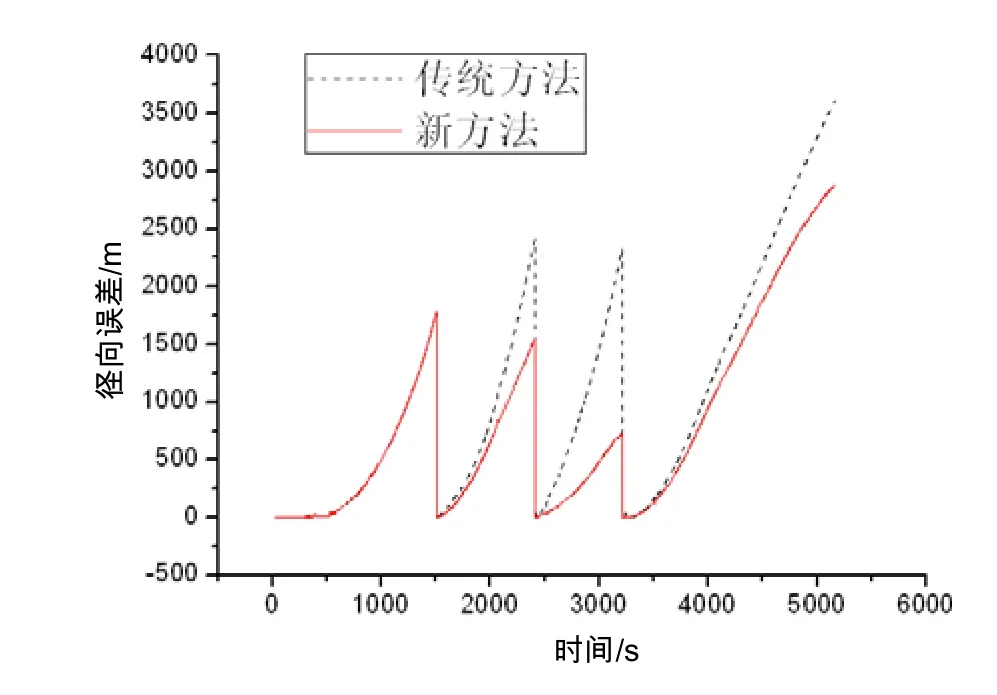
圖6 (a) 徑向誤差曲線Fig.6 (a) Curves of radial errors
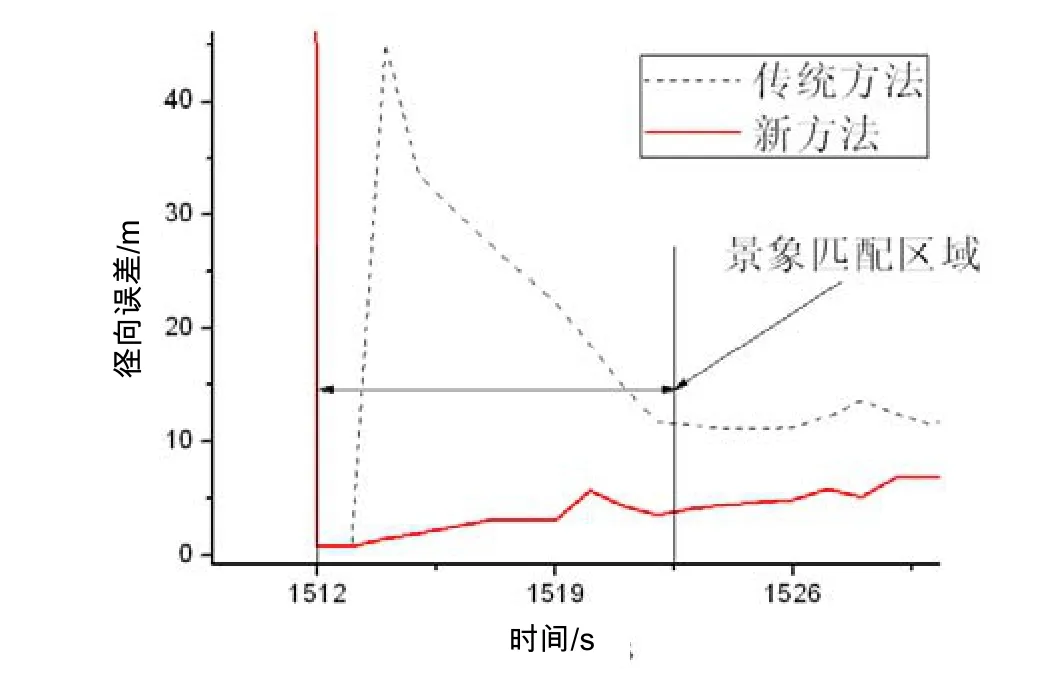
圖6 (b) 徑向誤差曲線局部放大圖Fig.6 (b) Part of radial error curves
景象匹配結果進行更加可靠的正確率判斷,認為景象匹配正確后,才進行慣性/景象匹配組合導航,組合導航結果更為平滑、準確。
由圖6(a)可知,傳統方法由于在景象匹配區域的組合導航結果發生跳變,誤差估計存在較大的偏差,導致組合導航后的純慣性導航誤差劣于基于證據推理的慣性/景象匹配組合導航的純慣性導航誤差。新方法的最終徑向誤差為2873 m,傳統方法的最終徑向誤差為3618 m。
5 總 結
本文基于證據推理理論,將與景象匹配置信度相關的特征量進行數據融合,獲得綜合信度與匹配正確率的關系曲線。使用綜合信度作為組合導航量測更新的依據,提高了卡爾曼濾波器的誤差估計精度以及組合導航精度。
通過車載試驗表明,基于證據推理的慣性/景象匹配組合導航相比傳統慣性/景象匹配組合導航,導航精度提高了25.9%,且計算復雜度低,易于工程實現。
(
):
[1] Feng Yang, Cheng Cheng, Quan Pan, et al. Practical integrated navigation fault detection algorithm based on sequential hypothesis testing[J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 146-149.
[2] Xu C, Liu J, Tang X. 2D shape matching by contour flexibility[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(1): 180-186.
[3] 蘇娟,徐青松,劉剛. 一種基于邊緣匹配的前視紅外目標識別算法[J]. 兵工學報,2012,33(3):271-277.
SU Juan, XU Qing-song, LIU Gang. A forward looking infrared target recognition algorithm based on edge matching [J]. Acta Armamentarii, 2012, 33(3): 271-277.
[4] 張青濤,楊學友,劉濤,等. 基于快速模板匹配的智能視覺傳感器設計[J]. 傳感技術學報,2013,26(8):1040-1044.
ZHANG Qing-tao, YANG Xue-you, LIU Tao, et al. Design of a smart visual sensor based on fast template matching [J]. Chinese Journal of Sensors and Actuators, 2013, 26(8): 1040-1044.
[5] Cuzzolin F. A geometric approach to the theory of evidence [J]. IEEE transactions on systems, Man, and Cybernetics-Part C: Applications and Reviews, 2008, 38(4): 522-534.
[6] Smarandache F, Dezert J. Fusion of sources of evidence with different importances and reliabilities[C]//Proceedings of Fusion 2010 Conference. Edinburgh, UK, 2010.
[7] 付艷華. 基于證據推理的不確定多屬性決策方法研究[D]. 沈陽:東北大學,2010.
FU Yan-hua. Researches on uncertain multi-arrtibute decision making based on evidential reasoning[D]. Shenyang: Northeastern University, 2010.
[8] 陳楸,曹衛濤. 基于場景識別的無人機自主著陸組合導航研究[J]. 計算機仿真,2011,28(2):84-87,150.
CHEN Qiu, CAO Wei-tao. Research on UAV autonomous landing integrated navigation based on scenes identification [J]. Computer Simulation, 2011, 28(2): 84-87, 150.
INS/Scene matching integrated navigation based on evidence reasoning
ZHENG Xin, SUN Wei, LI Qun, GUO Yuan-jiang
(Beijing Institute of Automatic Control Equipment, Beijing 100074, China)
In view that traditional INS/scene matching integrated navigation may have the problem of mismatch, which could decrease its navigation accuracy, an INS/scene matching integrated navigation scheme based on evidence reasoning was designed. In the INS/scene matching integrated navigation, the characteristic values, which are related to scene matching confidence, were fused by evidence reasoning to get the apprehensive credibility. The proposed method can effectively improve the estimate precision of system errors by using the apprehensive credibility as the rationale of measurement update in integrated navigation. The result shows that this method improves integrated navigation precision by 25.9% compared with traditional method.
evidence reasoning; scene matching; inertial navigation; integrated navigation
1005-6734(2014)05-0624-05
10.13695/j.cnki.12-1222/o3.2014.05.013
U666.1
A
2014-06-03;
2014-09-26
總裝預研課題(51309030203)
鄭辛(1968—),男,研究員,從事制導與控制、捷聯慣導、組合導航系統研究。E-mail:33s@163.com