冷原子陀螺儀三維磁場系統(tǒng)的容差設計
2014-10-24 02:19:12劉元正王繼良
中國慣性技術學報 2014年5期
李 攀,劉元正,王繼良
(西安飛行自動控制研究所,西安 710065)
冷原子陀螺儀三維磁場系統(tǒng)的容差設計
李 攀,劉元正,王繼良
(西安飛行自動控制研究所,西安 710065)
磁場系統(tǒng)作為磁光阱的重要組成部分,在高精度冷原子陀螺儀中占有極其重要的地位。隨著陀螺體積的不斷減小和集成度的不斷提高,磁場系統(tǒng)的制造和裝調誤差對陀螺性能的影響不斷增大。這些誤差會引起磁場零點漂移和磁場梯度變化,降低捕獲效率和原子團的質量,從而影響陀螺性能。從三維磁光阱磁場分布的理論分析出發(fā),結合數學建模和計算機仿真,對三維磁場系統(tǒng)的主要制造和裝調誤差對磁場的影響進行了分析和比較,并基于預設閾值利用試驗設計和數學回歸對關鍵制造和裝調參數設計了合理的容差限,為小型化冷原子陀螺儀三維磁場系統(tǒng)的設計和制造提供了理論依據。
冷原子陀螺儀;磁光阱;磁場系統(tǒng);容差設計
冷原子陀螺是目前已知的理論精度最高的慣性敏感器,在同等干涉環(huán)路面積下,其精度可達激光陀螺的~1011倍[1],純慣性導航的理論精度達到5 m/h,可以獨立完成長時間、遠航程的導航任務[2]。2010年,美國 Draper實驗室在對遠期陀螺技術應用的展望中預測,2020年左右冷原子陀螺將占據超高精度導航領域市場(10?6(°)/h)[3]。美國空軍已將冷原子陀螺作為2010~2030年無GPS輔助慣性導航系統(tǒng)唯一慣性傳感器[4]。
由于冷原子陀螺具有超高性能和巨大潛力,將對慣性導航領域產生重大影響,世界各國知名機構均投入大量人力物力從事相關研究工作,以期占據原子陀螺技術的至高點,實現慣性導航領導的絕對技術優(yōu)勢和領先地位[5-10]。隨著冷原子技術的逐漸成熟,困擾冷原子導航傳感器實際應用的穩(wěn)定性、體積和功耗問題正在逐步得到解決。2008年,美國斯坦福大學利用微晶玻璃真空腔和 π/2-π-π-π/2原子干涉構型顯著減小了陀螺體積,形成了全球首款可移動的冷原子陀螺儀[11];2011年,美國AOSense公司發(fā)布了全球首款原子光學傳感器商品——商用冷原子重力梯度儀[12],噪聲小于 1×10?6g/Hz1/2。這些成果標志著冷原子慣性傳感器已經開始向工程化、小型化迅速發(fā)展。
隨著冷原子陀螺儀體積的不斷減小和集成度的不斷提高,制造和裝調誤差對陀螺性能的影響不斷增大。比如,由于隨著陀螺體積減小,三維磁光阱的可調節(jié)范圍也不斷減小,此時磁光阱線圈的制造和裝調誤差將更易引起三維磁光阱性能變化,降低捕獲率及捕獲原子團的質量。所以,開展容差設計研究、設計合理的容差限對于逐漸走向小型化、工程化的冷原子陀螺儀很有必要。
本文從三維磁光阱磁場分布的理論分析出發(fā),結合數學建模和計算機仿真,對三維磁光阱線圈的主要制造和裝調誤差對磁場的影響進行了分析和比較,根據預設的閾值設計了合理的容差限,為小型化冷原子陀螺儀三維磁場系統(tǒng)的設計和制造提供了理論依據。
1 三維磁場系統(tǒng)理論分析
1.1 載流環(huán)形線圈的磁場
結合圖1所示,根據畢奧-薩伐爾-拉普拉斯定律,任一電流元Idl在點P形成的磁場可以表示為
式中,r為元電荷指向點P的矢量,μ0為真空電導率。
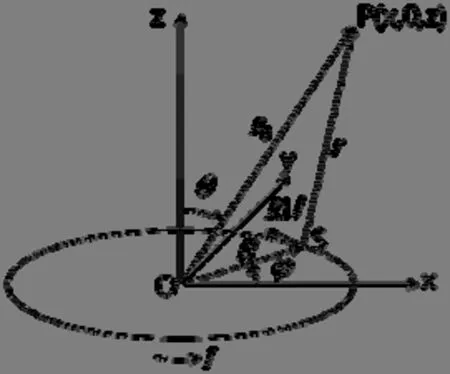
圖1 環(huán)形電流磁場Fig.1 Ring current magnetic field
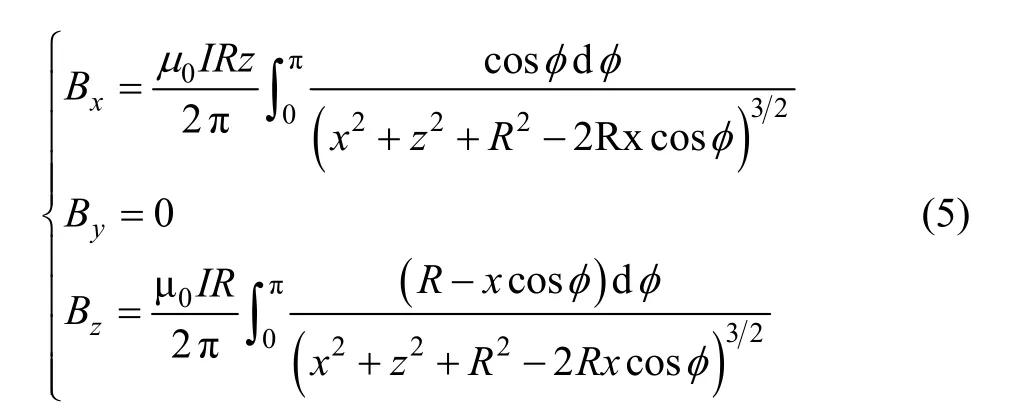
由于線圈具有軸對稱特性,可將點P放在xz平面上以減少計算步驟。考慮位于S點的電流元Idl,OS與x軸的夾角為φ,則有:

由圖1可知,
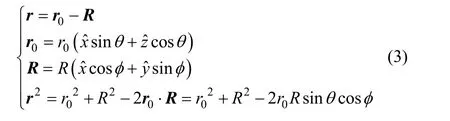
將式(2)(3)代入式(1)可得:
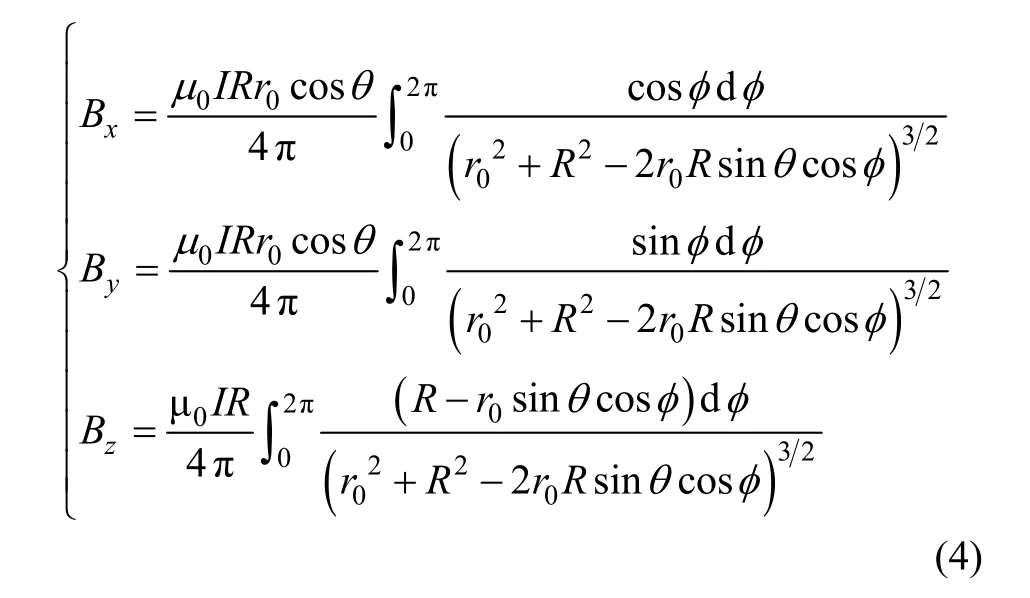
化簡,可得:
1.2 反亥姆霍茲線圈形成的磁場
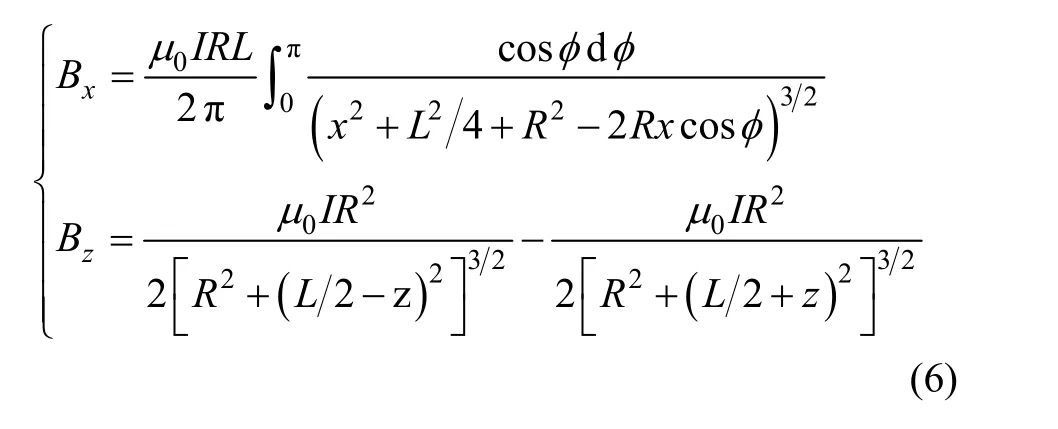
現考慮反亥姆霍茲線圈,它由一對間距L的環(huán)形線圈構成,兩個線圈的載流方向相反,如圖2所示。
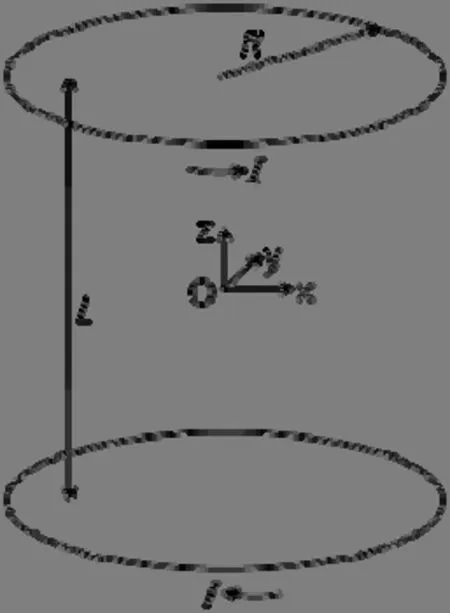
圖2 反亥姆霍茲線圈Fig.2 Anti-Helmholtz coils
以兩個線圈中心為坐標原點建立坐標系,那么沿x軸和z軸的磁感應強度可以表示為兩個線圈的疊加:
多重反亥姆霍茲線圈可以表示為多組反亥姆霍茲線圈的疊加。設d為導線直徑,n1為軸向磁場線圈匝數,n2為徑向磁場匝數,R1、R2為線圈內、外徑,L0為線圈間距,那么沿x軸和z軸的磁感應強度可以表示為:
利用Matlab進行仿真計算,可以完成線圈設計(I=2 A,R1=47.5 mm,L0=54 mm,n1=12,n2=13,d=1 mm),并得到其軸向和徑向磁場分布(圖3)。
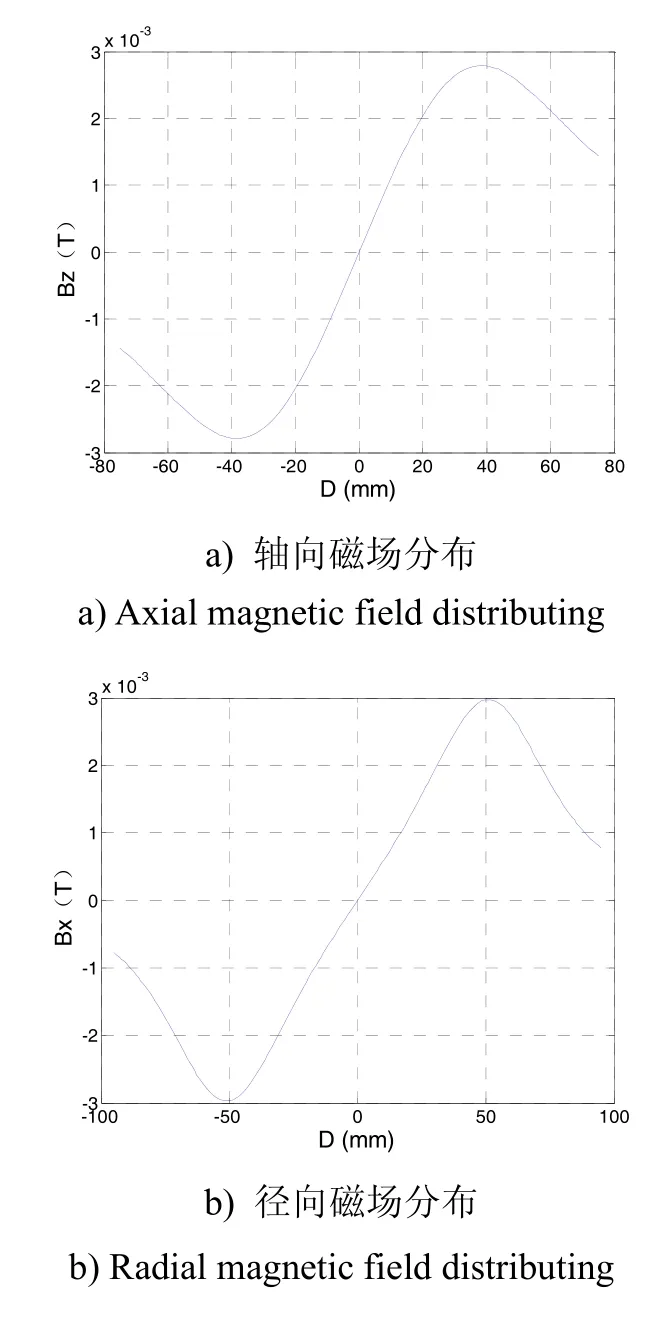
圖3 軸向和徑向磁場分布Fig.3 Axial and radial magnetic field distributing
圖3中D為距磁場中心的距離,Bx、Bz分別為沿x軸和z軸的磁感應強度。考慮到陷俘光直徑一般不超過20 mm,所以僅需考慮磁場中心±10 mm范圍內的磁場梯度。對±10 mm范圍內的磁場進行擬合,可以得到軸向磁場梯度dBz=0.1119 T/m 和徑向磁場梯度dBx=dBy=0.0575 T/m,符合三維磁光阱軸向磁場梯度大于0.1 T/m的經驗性要求。
2 誤差分析
上述磁場設計僅考慮了理想狀態(tài),但在實際加工中往往存在著各種制造誤差,主要包括:兩線圈的對稱軸不重合(簡稱同軸度誤差)、兩線圈定位面不平行(簡稱平行度誤差)、兩線圈匝數不相等(簡稱線圈不對稱)以及線圈龍骨加工誤差引起的兩線圈內徑不相等(簡稱內徑不對稱)等。這些誤差或引起線圈移位,或引起線圈傾斜,會導致磁場零點漂移和磁場分布變化,所以必須確定這些誤差的容差范圍,并在設計指標中加以限定。
為統(tǒng)一模型,固定下線圈保持不變,制造誤差均體現在上線圈上。利用Matlab在初始坐標系下分別計算線圈組合沿x、y、z軸的磁場分布,根據仿真結果確定磁場零點漂移Δ,然后以新的磁場零點建立坐標系,重新計算磁場分布。
控制閾值選擇dBz≥0.1 T/m,磁場零點漂移Δ≤1 mm,以閾值點處的制造誤差為容差設計提供參考。
2.1 同軸度誤差C
使上線圈沿x軸移動以產生偏心誤差C,得到磁場隨偏心誤差C的變化如圖4所示。
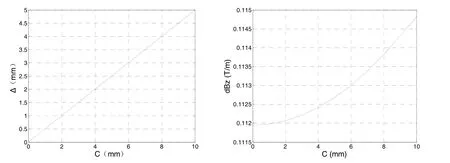
圖4 同軸度誤差對磁場的影響Fig.4 Effects of coaxiality error on magnetic field
磁場零點會沿著軸對稱誤差的方向移動,移動距離等于軸對稱誤差的一半;而磁場梯度隨著偏心誤差的增加而逐漸加大。考慮到控制閾值,C≤2 mm。
2.2 平行度誤差θ
以上、下線圈的下底面作為定位面,繞x軸轉動上線圈以產生平行度誤差θ,得到的磁場變化如圖5所示。
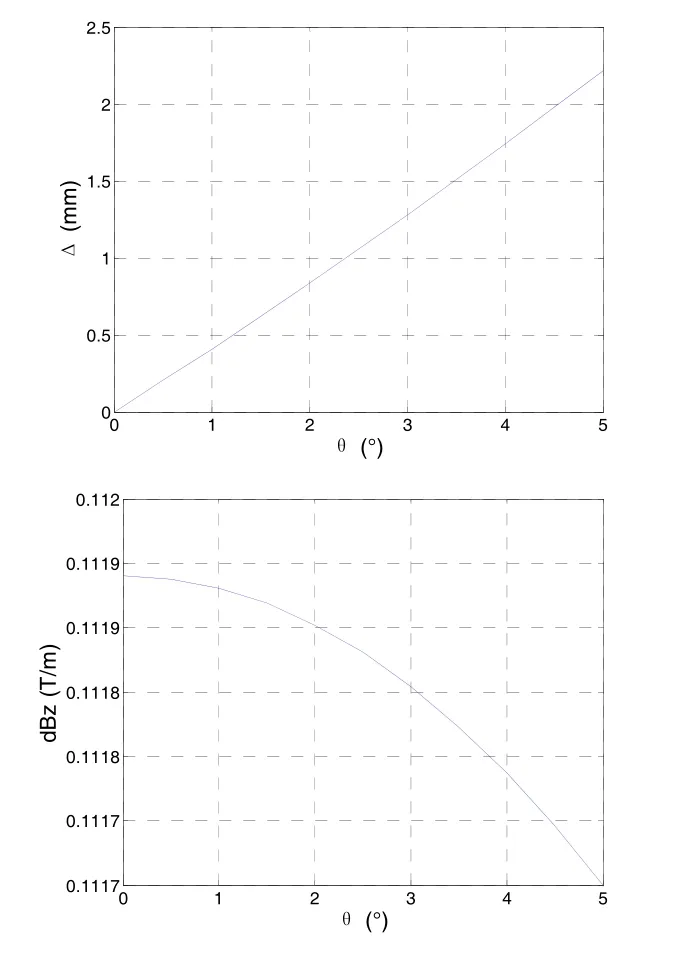
圖5 平行度誤差對磁場的影響Fig.5 Effects of parallelism error on magnetic field
磁場零點漂移隨平行度誤差近乎線性增加,主要沿x軸方向,y、z軸方向變化相對不明顯;而磁場梯度隨著偏心誤差的增加而逐漸減小,但幅度不明顯。考慮到控制閾值,θ≤2.375°。
2.3 線圈不對稱a
定義線圈不對稱指標a=ΔN/N,ΔN為上、下線圈的匝數差,N=n1·n2為下線圈的總匝數。減少上線圈匝數以形成線圈不對稱,可以得到磁場與線圈不對稱指標a之間的關系如圖6所示。
線圈不對稱會引起磁場零點在z軸方向移動,而在x、y軸方向則保持不變。從圖 6中可以看出,線圈不對稱會顯著降低磁場質量,隨著不對稱加劇,零點位移增大,磁場梯度也迅速減小。考慮到控制閾值,當a<0.052時滿足Δ≤1 mm,dBz>0.1 T/m。
通過對上、下線圈分別加不同電流可以使磁場零點沿z軸移動從而對線圈不對稱進行補償。如果上、下線圈所通的總電流保持一致,即使上、下線圈差別相對較大如a=0.1,此時磁場零點漂移仍滿足控制指標Δ≈?0.2449 mm<1 mm。
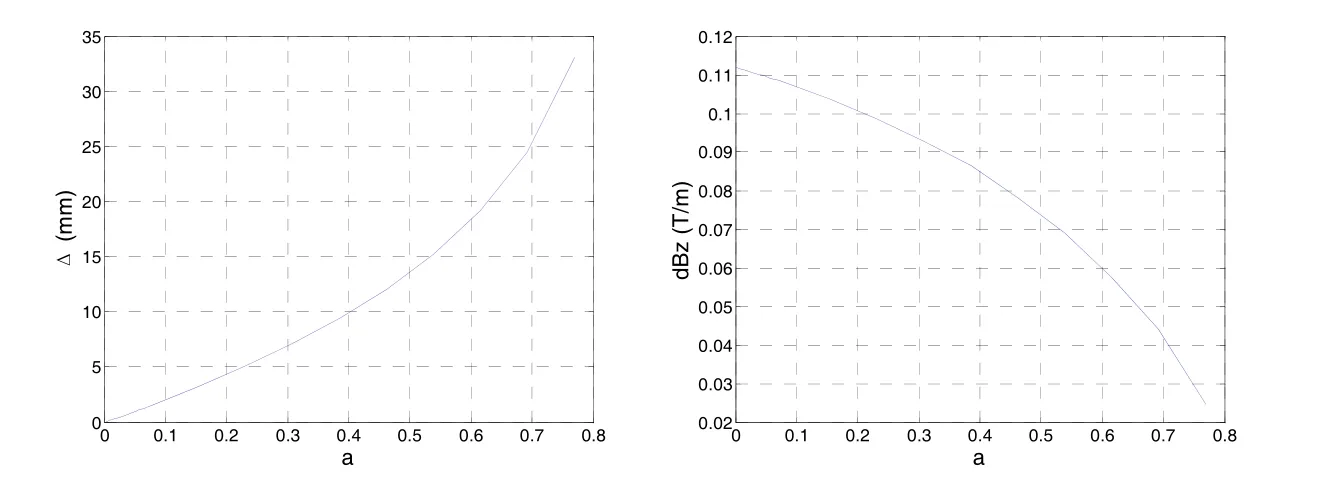
圖6 線圈不對稱誤差對磁場的影響Fig.6 Effects of coils asymmetry on magnetic field
2.4 內徑不對稱
定義內徑不對稱指標b=ΔR/R,ΔR為上、下線圈的半徑差。減小上線圈內徑可以得到磁場與內徑不對稱b之間的關系如圖7所示。
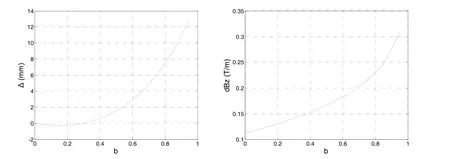
圖7 內徑不對稱誤差對磁場的影響Fig.7 Effects of inside diameter asymmetry on magnetic field
內徑不對稱會引起磁場零點在z軸方向移動,在x、y軸方向則保持不變。從圖7中可以看出,當b≤0.44時,Δ<1 mm;對于R=47.5 mm,這相當于超過13.5 mm的加工誤差,幾乎不大可能。有趣的是,圖7中Δ在b≈0.293的位置又出現一個零點,即ΔR=13.92時磁場零點與ΔR=0時保持一致。擬合得到dBz=0.1399 T/m,也滿足閾值控制指標。
3 容差設計
從上述分析可以看出,同軸度誤差、平行度誤差、線圈匝數不對稱、線圈內徑不對稱都會對磁場產生影響,改變三維磁光阱的性能,所以必須在設計中加以限定。
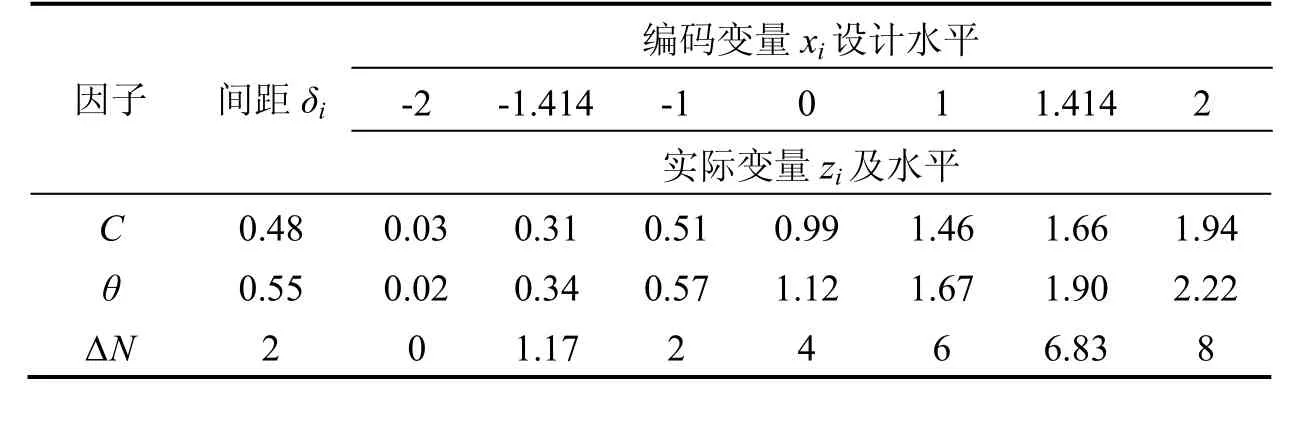
表1 最優(yōu)近似飽和設計試驗因子及水平Tab.1 Optimal approximation saturation design experimental factors and levels
由于各容差參數之間的單位、性質并不完全相同,對磁場參數的影響也不是簡單的線性疊加,傳統(tǒng)的等公差法、等精度法等容差設計方法并不完全適合。所以下文將采用回歸分析的方法建立容差參數與磁場性能參數之間的回歸關系,根據現有加工能力和各容差參數加工的難易程度,從中優(yōu)選出合適的容差參數組合。
為降低計算量并提高回歸精度,并考慮到使用簡單的一次回歸正交設計并不能得到滿意的結果,故采用最優(yōu)近似飽和設計進行二次回歸。由于在常規(guī)加工條件下,內徑不對稱誤差對磁場的影響可以忽略,故取同軸度C (mm)、平行度θ (°)和線圈匝數差ΔN作為三因子采用最優(yōu)近似飽和設計(R311D)進行回歸設計,各因子的編碼自變量(xi)的編碼水平j和實際自變量(zi)的實際水平如表1所示。表1中,-2水平代表常規(guī)條件下加工能達到的極限精度,對于車加工形成的C和θ,對應標準公差等級7,通過查表可以得到,而繞制的ΔN可以達到最小,即ΔN=0。+2水平代表其它兩因子均取-2水平時滿足控制指標的極值,可以通過計算得到。實施水平間距δi為:

式中,xji和zji下標i代表編碼,j代表設計水平。從而編碼水平j對應的實際水平為:

具體數值如表1所示。
使用Matlab進行計算,得到的結果如表2所示。
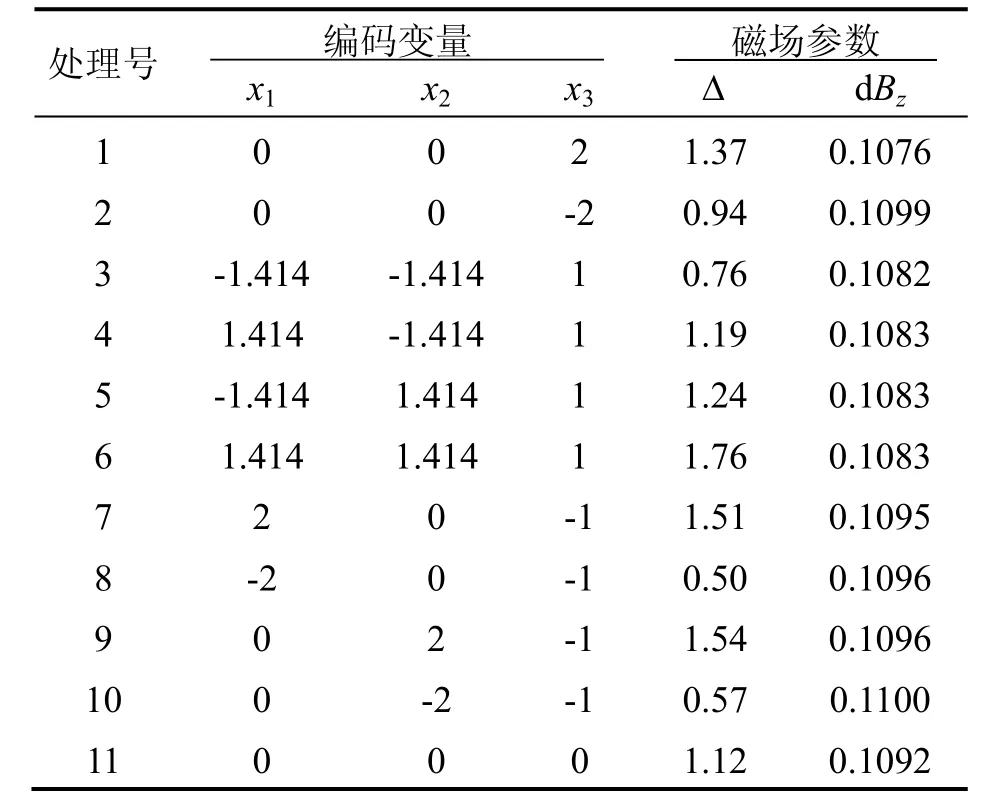
表2 試驗方案及結果Tab.2 Experimental scheme and results
從表中可以看出,任意處理均滿足 dBz≥0.1 T/m的控制指標,故只需計算Δ。
使用下列模型進行二次回歸:

式中,n為自變量的數目,b0為回歸方程的常數項,bi為一次項的偏回歸系數,bij為二次項的偏回歸系數。
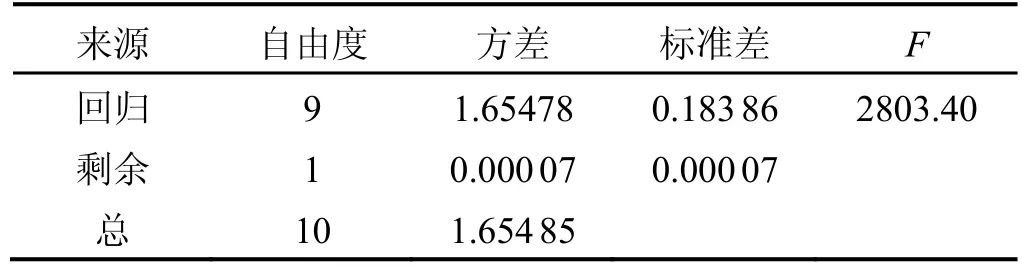
表3 試驗方差分析Tab.3 Analysis of variance
使用Minitab進行數學回歸。從方差分析表(表3)可以看出,回歸達到顯著水平(F>F0.05(9,1)=241),回歸方程的復相關系數Rsq=0.999 98;偏回歸t檢驗中,b0、b1、b2達到極顯著水平(p<0.01),b3、b13、b23達到顯著水平(p<0.05),而其它系數未達到顯著水平(p>0.05),如表4所示。
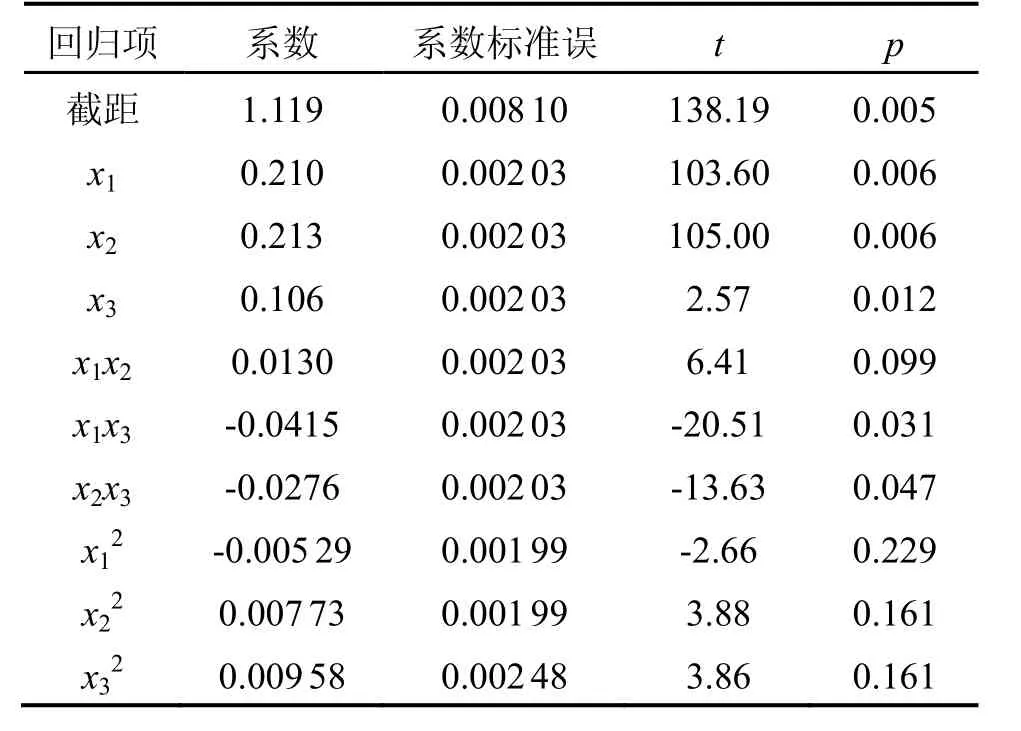
表4 偏回歸系數b的t檢驗Tab.4 T test of partial regression coefficient b
回歸方程為:
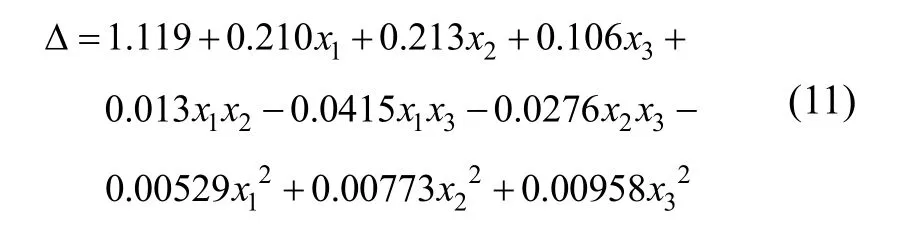
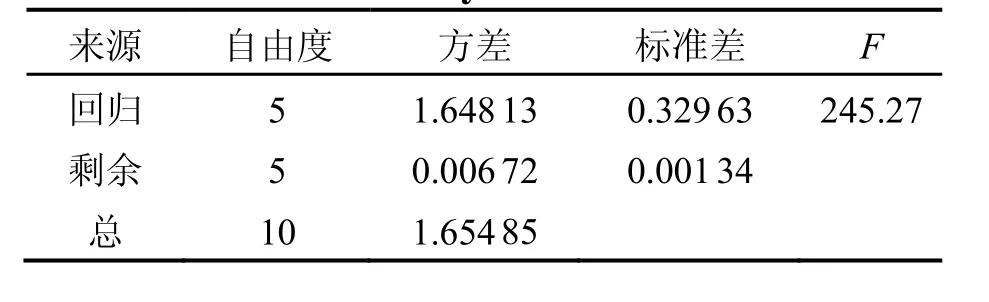
表5 試驗方差分析Tab.5 Analysis of variance
將未達到顯著水平的系數并入誤差項重新進行回歸。從表 5中可以看出,回歸達到極顯著水平(F>F0.01(5, 5)=10.97),Rsq=0.996;偏回歸t檢驗中,b0、b1、b2、b3、b13達到極顯著水平(p<0.01),b23達到顯著水平(p<0.05),如表6所示。
回歸方程為:

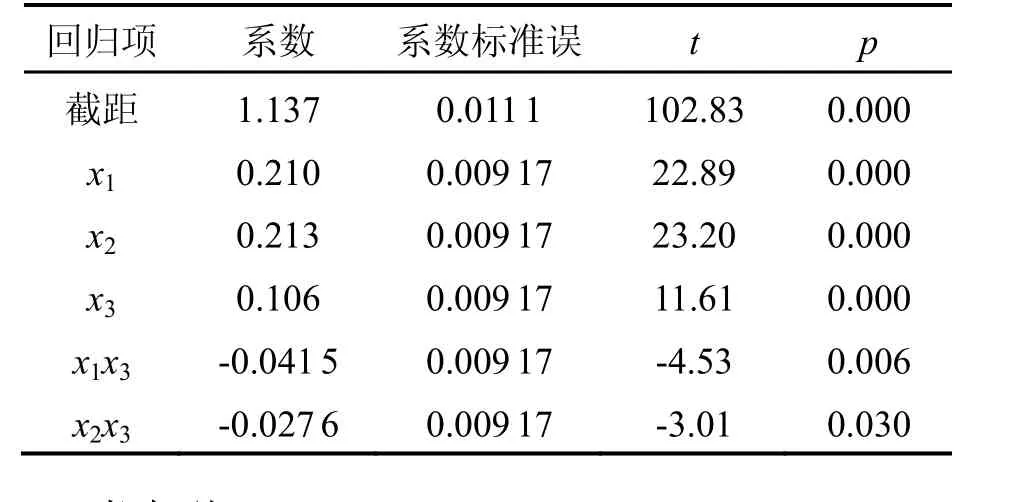
表6 偏回歸系數b的t檢驗Tab.6 T test of partial regression coefficient b
考慮到

可得

即

結合回歸方程,綜合考慮,取C=0.51,θ=0.57,ΔN=6,即(-1, -1, 1)水平。回歸結果為Δ=0.89 mm,Matlab計算結果為Δ=0.87 mm,dBz=0.1079 T/m,符合控制指標。
4 結 論
隨著冷原子技術的逐漸成熟,困擾冷原子陀螺儀實際應用的穩(wěn)定性、體積和功耗問題正在逐步得到解決。在歐美大型國家計劃的支持下,冷原子陀螺儀正逐漸走向工程化。歐美國家計劃于2013~2014年完成冷原子慣性導航系統(tǒng)裝機試飛工作,并最早于 2018年正式投入使用[13-14]。這些進展意味著冷原子陀螺儀的工程化、實用化已經迫在眉睫。
本文從環(huán)形電流的磁場分布模型出發(fā),建立了三維磁光阱磁場線圈的數學模型;通過計算機仿真,對三維磁場系統(tǒng)的主要制造和裝調誤差——同軸度誤差、平行度誤差、線圈不對稱和內徑不對稱——對磁場零點和梯度的影響進行了分析和比較,并利用最優(yōu)近似飽和設計進行二次數學回歸,通過優(yōu)選得到了關鍵制造和裝調參數的容差限。該工作為小型化冷原子陀螺儀三維磁場系統(tǒng)的工程化設計和制造提供了理論依據和參考價值。
(
):
[1] Clauser J F. Ultra-high sensitivity accelerometers and gyroscopes using neutral atom matter-wave interferometry [J]. Physica B, 1988, 151: 262-272.
[2] Committee on Universal Radio Frequency System for Special Operations Forces, Standing Committee on Research, Development, Acquisition Options for U.S. Special Operations Command, National Research Council. Toward a universal radio frequency system for special operations forces[M]. Washington: National Academies Press, 2009.
[3] Schmidt G T. INS/GPS technology trends[R]. Massachusetts Institute of Technology, 2010.
[4] United States Air Force Chief Scientist (AF/ST). Report on technology horizons: a vision for air force science & technology during 2010-2030[R]. United States Air Force, 2010.
[5] 張學峰,許江寧,周紅進. 原子激光陀螺[J]. 中國慣性技術學報,2006,241(5):86-88.
ZHANG Xue-feng, XU Jiang-ning, ZHOU Hong-jin. Atom laser gyroscope[J]. Journal of Chinese Inertial Technology, 2006, 241(5): 86-88.
[6] 謝征,劉建業(yè),賴際舟. 基于低溫物理效應的新型超高精度陀螺儀研究綜述[J]. 中國慣性技術學報,2007,15(5):606-611.
XIE Zheng, LIU Jian-ye, LAI Ji-zhou. Research status of new high-precision gyroscope based on cryogenic physical effects[J]. Journal of Chinese Inertial Technology, 2007, 15(5): 606-611.
[7] 秦永元,游金川,趙長山. 利用原子干涉儀實現高精度慣性測量[J]. 中國慣性技術學報,2008,16(2):244-248.
QIN Yong-yuan, YOU Jin-chuan, ZHAO Chang-shan. High accuracy inertial measurement based on atom interferometer[J]. Journal of Chinese Inertial Technology, 2008, 16(2): 244-248.
[8] Fang J C, Qin J. Advances in atomic gyroscopes: a view from inertial navigation applications[J]. sensors, 2012, 12(5): 6331-6346.
[9] Kitching J, Knappe S, Donley E A. Atomic sensors – a review[J]. IEEE Sensors Journal, 2011, 11(9): 1749-1758.
[10] 李攀,李俊,劉元正,等. 基于冷原子技術的導航傳感器現狀與發(fā)展[J]. 激光與光電子學進展,2013(11):35-43.
LI Pan, LI Jun, LIU Yuan-zheng, et al. Current status and development of navigation sensors based on cold atoms [J]. Laser & Optoelectronics Progress, 2013(11): 35-43.
[11] Takase K. Precision rotation rate measurements with a mobile atom interferometer [D]. USA: Stanford, 2008.
[12] AOSense. Accelerometer for space applications based on light-pulse atom interferometry[EB/OL]. (2011-09-08) [2013-02-02]. https://ehb8.gsfc.nasa.gov/sbir/docs /public/ recent_elections/SBIR_11_P1/SBIR_11_P1_115522/brief chart.pdf.
[13] DARPA. Precision inertial navigation systems(PINS) [EB/OL]. (2010-12-30)[2013-02-02]. http://www. darpa.mil/ Our_Work/DSO/Programs/Precision_Inertial_Navigation _Systems_(PINS).aspx.
[14] Suriano M A. Robust technology to augment or replace the US reliance on the global positioning system[R]. Air University, 2011.
Tolerance design for three-dimension magnetic field system of cold atom gyroscope
LI Pan, LIU Yuan-zheng, WANG Ji-liang
(Flight Automatic Control Research Institute, Xi’an 710065, China)
Magnetic system of magneto-optical trap is an important part of high-precision cold atom gyroscopes. With the continuous decreases of gyroscope volume and improvements of integration, the effects of manufacturing and assembly errors of magnetic system on gyroscope performance are increasing. These errors will cause the field’s bias drift and gradient change, reduce work efficiency and quality of cold atom clouds, and ultimately affect the gyroscope performance. Based on the analysis of field distribution of three-dimension magnetic-optical trap and combined with the mathematical modeling and computer simulation, the effects of main manufacturing and assembly errors on the magnetic fields are analyzed and compared. In view of the present thresholds, the reasonable tolerance limits of key manufacturing and assembly parameters are designed by experimental design and regression analysis. And the theoretical basis for the design and manufacture of three-dimension magnetic system of miniaturized cold atom gyroscope is also provided.
cold atom gyroscope; magneto-optical trap; magnetic field system; tolerance design
1005-6734(2014)05-0671-06
10.13695/j.cnki.12-1222/o3.2014.05.022
U666.1
A
2014-05-13;
2014-09-26
總裝十二五航空支撐資助項目(61901060301)
李攀(1983—),男,工程師,從事量子傳感器技術研究。E-mail:lp_forever5281@sina.com
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42