艦載光電伺服設備的系統辨識研究
2014-11-09 09:08:06周俊鵬王一卉
液晶與顯示 2014年5期
周俊鵬,李 焱,王一卉,陳 娟
(長春工業大學 電氣與電子工程學院,吉林 長春 130012)
1 引 言
可信度高的系統辯識獲取電機機械時間常數Tm和固有放大倍數K的精度高,從而得到的電機傳遞函數模型準確。Tm的倒數是速度環的第二個拐點與調節器構成的系統影響BODE圖低頻段的走勢,根據自控原理低頻段增益及其走勢直接影響系統穩態精度和動態精度,獲得準確的Tm和K,能使控制模型準確,從而穩態、動態精度相對越高。常規系統辯識方法均從直流電機微分方程出發,并沒有給出具體實施方案和實施過程[1-2],只是利用電流與時間的關系圖得到電流值的63.2%,其對應的時間即為機械時間常數而電機空載條件下運行,測出空載機械特性計算出電動機轉動慣量,進而從導出公式中計算出Tm,但此方法只能適應具有大轉動慣量的電機,沒有太大的實用價值[3]。利用最小二乘構造倆參數線性方程,求出機械時間常數,其計算過程繁瑣,只適用于某些電機而不具有普遍性[4],構造更復雜的三參數最小二乘線性方程,僅僅從理論出發,沒有實際工程背景,并不具有實用價值[5]。利用掃頻法測出系統輸入與輸出的關系,在MATLAB中的simulink環境下開發遞推最小二乘在線系統辯識,有其應用的局限性,精度不是很高[6],卡爾曼濾波辯識算法,雖然給出來精度,但運算量過大,不利于艦載伺服系統對Tm的獲取[7]。另外,有些方法導出Tm和時間的積分關系,將積分轉化為梯形面積,但沒有給出可信度、精度和工程可行性[8]。設計并利用Origin中近似逼近e指數函數擬合方法,其擬合誤差小于0.1,可信度達到96%以上,解決了上述傳統方法在獲取電機機械時間常數精度低,可信度不高的問題。該項技術成功地應用在項目中,其擬合階躍法對獲取電機機械時間常數有很好的通用性和借鑒性。
2 伺服系統實現
2.1 PC104硬件平臺
選X86架構的PC104嵌入式計算機作為目標機的伺服控制系統核心處理器,128M的CF卡作為外部程序機為核心處理器,128M的CF卡作為外部程序存儲器。顯控系統硬件實物如圖1所示。分別設計定義了16C754四路串口的基地址分別為0x330、0x348、0x298、0x240,中斷號分別為0x04、0x05、0x03、0x07。定義了82C55按照A路輸入,B、C路輸出的方式工作,基地址為0x3e0。FPGA為顯控系統各芯片提供地址譯碼,并在外部準秒脈沖同步基礎上產生16、25、400Hz的內部分頻信號。通過INTEL 82559ER的網絡控制芯片與外部通道臺進行UDP網絡的信息交互。
如圖1所示,此硬件作為伺服系統辨識的平臺,進行軟件開發。
2.2 軟件實現
由旋轉變壓器反饋出來的速度碼值用aa_0來表示,速度環開環輸出碼值用axk來表示。在TL16C754A口中斷程序中設定axk的碼值,編碼器的采樣周期0.0025s,這樣就可以得到旋轉變壓器反饋速度值aa_0。在程序的主函數中設置輸出函數fprintf(fp1,"%04d%08.4lf%06ld/n",++Store_Counter,aa_0,encodera_0),便于讀出旋轉變壓器的值,流程圖如圖2所示。在CCS3.3中通過選擇存盤操作可以得到DAT文件,即可直接用word的EXCEL文件打開,選擇適當值。
人機交互界面采用多任務機制,具有優先級且任務間具備同步優點;多任務間的通信;中斷延遲、任務切換、驅動程序延遲等操作系統行為是可知和可預測的。見人機交互界面圖3,可以在界面上方便的顯示、修改Tm和K值,不用編譯函數體。
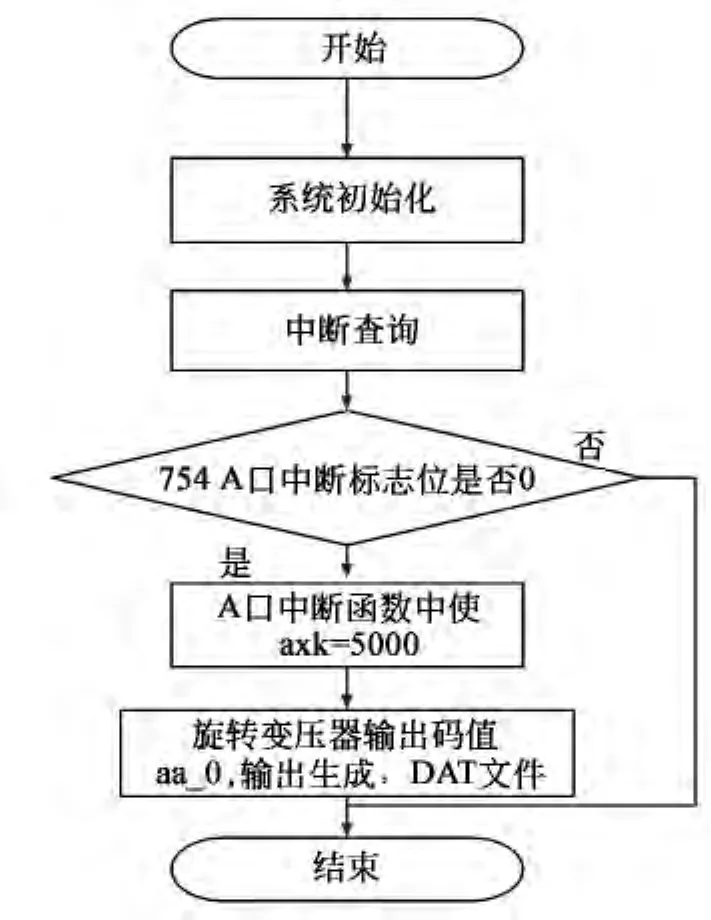
圖2 A口中斷流程圖Fig.2 Flow chart of port A interruption
圖3 人機交互界面圖Fig.3 Man-machine interface diagram
此顯控系統中右面前4列分別對應Tm、K、精度可信度,可見此人機交互界面直接讀取Tm和K,及相關參數方面非常方便實用。
3 系統辨識的研究分析
3.1 近似逼近e指數函數理論依據
根據電壓平衡方程式和負載為零時轉矩平衡方程式,以及機電時間常數、電氣時間常數計算公式可得:
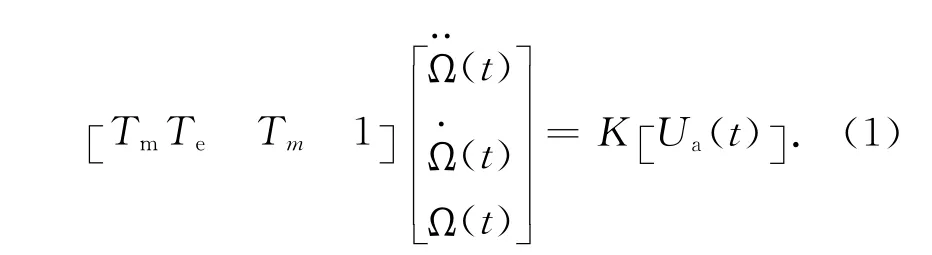
其中:Tm為機電時間常數,Te為電氣時間常數,Ω(t)為電機角速度,Ua為電機端電壓。
其中:Ce為電動勢常數,Φ為磁通量。
零初始條件下對式(1)做拉氏變換可得:
其中:Mf為電壓頻率為f時電機的角速度與電壓頻率為0時電機角速度的比值。由上式可得:

此公式作為階躍法擬合曲線公式的依據。
3.2 近似逼近的e指數系統辨識模型
對于公式法帶來的不便,且大多方法逼近真實值的精度很低,利用Origin擬合e指數函數方法其可信度高達96%以上,而且e指數的函數表達式用計算機很容易實現。在OriginPro7.0中根據公式:

將速度輸出碼值通過e指數函數轉化成連續函數。根據式(2)使用擬合函數為:

其中:Y為旋轉編碼器反饋速度碼值(即aa_0的值),X為對應碼值的序號。
P1、P2為最終需要擬合的未知量對應的機械時間常數和固有放大倍數。這樣就可以通過測量得到的輸出速度碼值和對應的碼值序號,通過式(3)以及 Origin擬合轉換出未知量 P1、P2,得到最終的近似逼近e指數函數,從而獲得高可信度和精度的系統辨識。

其中:P1,P2為通過Origin擬合出來的數值,axk為開環輸出速度碼值,T為采樣周期800Hz。
4 Origin擬合實現及分析
4.1 系統辨識實現過程
為提高獲得Tm和K的準確性,在試驗中正向、反向各測兩次,最后取平均值經過計算即可得到所需時間常數和放大倍數。在中斷程序中設置速度開環輸出的碼值axk=5000(正向),axk=-5000(反向),用旋轉變壓器得到的2000多組值,導入originPro中,通過擬合可得所需近似逼近e指數函數,從而計算出Tm和K。
圖4~圖7中橫軸為旋轉變壓器的碼值所對應的序號值,縱軸為旋轉變壓器輸出的碼值,黑實線代表真實值曲線,紅虛線代表按照近似逼近e指數函數300次連續逼近擬合后的曲線。從階躍曲線中可以看出正向第一次擬合低碼段,與真實曲線有細微的偏差。反向第一次測量其低碼段有不明顯的偏離,四幅擬合曲線圖中的中高碼段與真實曲線基本完全重合。可見應用Origin軟件,按照近似逼近e指數函數去逼近真實曲線的效果很好。從圖4和圖6旁邊的小放大圖中可清楚看到。

圖4 正向第一次擬合曲線圖Fig.4 Positive first fitting curves picture
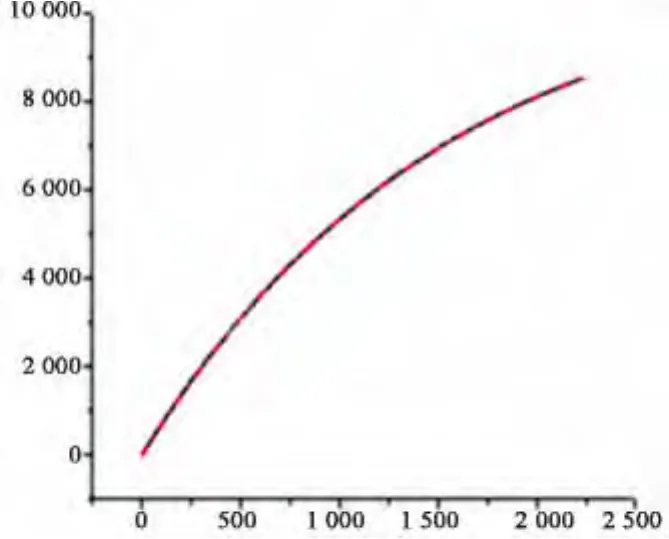
圖5 正向第二次擬合曲線圖Fig.5 Positive second fitting curves picture
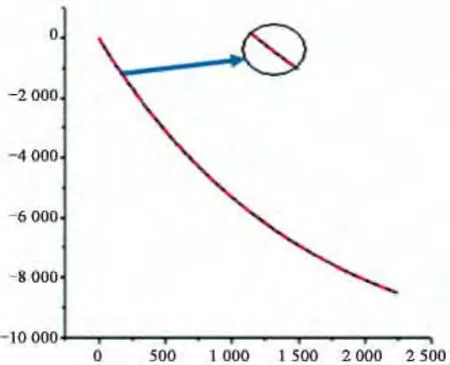
圖6 反向第一次擬合曲線圖Fig.6 Negative frist fitting curves picture
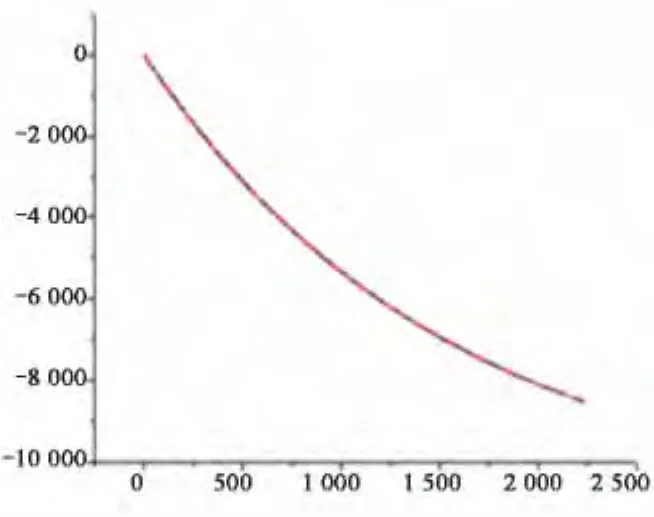
圖7 反向第二次擬合曲線圖Fig.7 Negative second fitting curves picture
4.2 系統辨識精度分析
為方便得到試驗結論,從Origin中提出數據得到表1,從表1中可清晰看出可信度都大于96%,誤差均小于0.1,完全滿足工程中所需精度要求。另外,可從表1中計算出P1的平均值為11067.22867,P1的誤差平均值為0.0954。P2的 誤差平均值為0.0257,P2的平均值為1530.074615。通過式(4)和式(5)最終得到電機固有放大倍數為:K=2.2134,由于旋轉變壓器采樣頻率為800Hz即0.00125s可知電機機械時間常數為1.9126s。所求值亦可在前述顯控系統中顯示。
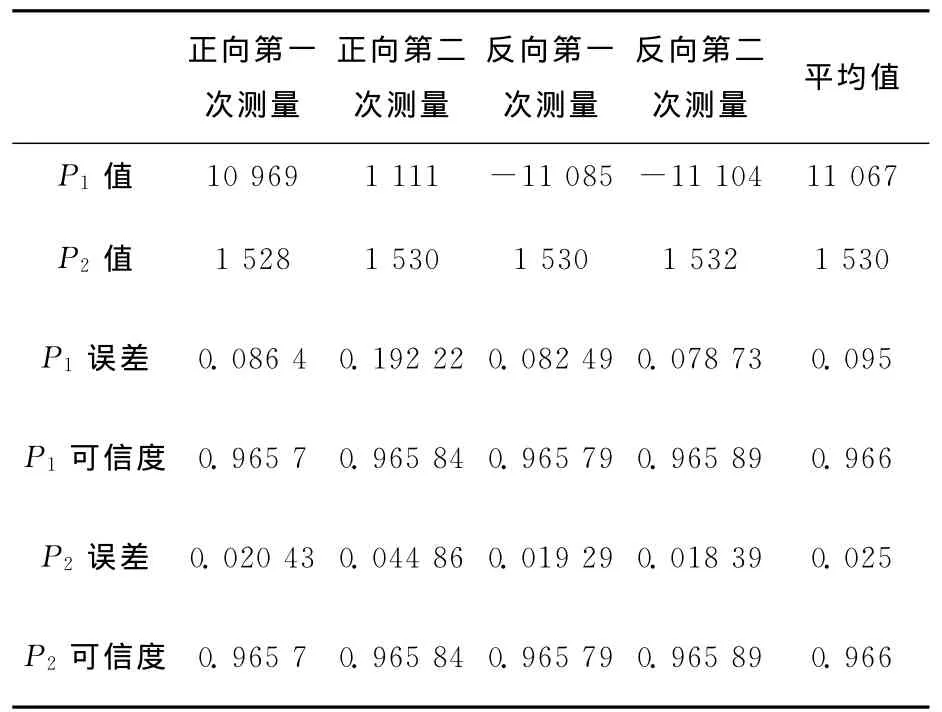
表1 試驗數據擬合值表Tab.1 Test data fitted value
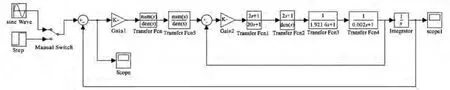
圖8 光電經緯儀模型方框圖Fig.8 Optical-electrionic theodolite model block diagram
4.3 控制精度對比分析
常規法計算機械時間常數公式為

其中:GD2為轉動慣量,R為電阻,Ce為電動勢常數,Cm為電磁轉矩常數,Φ為磁通量。將廠家給出的電機常數帶入式(6)中得Tm=1.9987s。光電經緯儀要求最大角速度48°/s,最大角加速度22°/s2,經計算可得到等效正弦,將此參數帶入圖8的Sine Wave中。再分別將常規公式法得到的Tm=1.9987和由e指數擬合階躍法得到的Tm=1.9216帶入圖8中的 Transfer Fcn4中,通過以上實際模型,經由 MATLAB中的SIMULINK仿真得到如圖9(a)、(b)所示。
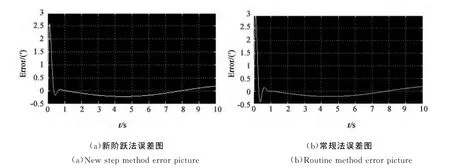
圖9 跟蹤誤差對比圖Fig.9 Tracking error comparsion picture
從圖9中可清晰看到常規法最大誤差3′,e指數階躍法最大誤差為2.5′,跟蹤誤差明顯得到改善。
5 結 論
經過試驗對比分析可知,用e指數擬合的階躍法誤差小于0.1,其置信度達到96%以上,彌補了公式法獲取Tm上的種種不足,并且克服了其他方法獲取Tm困難、可信度和精度不高的難題。從跟蹤誤差對比圖中可看到新方法得到誤差減小0.5’,可看到此方法在提高跟蹤精度方面的優越性。同時方便的得到放大倍數K,電機電氣時間常數Te可通過萬用表測得,從而得到電機傳遞函數。在開發的人機交互界面上方便的修改、顯示系統辯識結果。此方法在實際應用中方便、可行、有效,能夠滿足項目對Tm的精度需要。對系統辯識具有很好的通用性和借鑒性。
[1]苗本健.伺服電動機動態參數辨識問題[J].伺服控制,2013(1):39-41.Miao B J.Servo motor dynamic parameter identification problem [J].Servo Control,2013(1):39-41.(in Chinese)
[2]蔡莎莎,毛曉明,陳志勇,等.同步電機調速系統參數辯識研究進展與展望[J].廣東電力,2012,25(10):29-32.Cai S S,Mao X M,Chen Z Y,et al.Research progress and prospect of reference identification of synchronous motor speed control system [J].Guangdong Power,2012,25(10):29-32.(in Chinese)
[3]張文海.伺服電動機的時間常數問題[J].微特電機,2012,40(8):75-76.Zhang W H.Time constant problem of servo motor[J].Emotorcn,2012,40(8):75-76.(in Chinese)
[4]馮清青.永磁直流電機測試系統研究[D].哈爾濱:哈爾濱工程大學,2012.Feng Q Q.Research on permanent magnetic DC motor testing system [D].Harbin:Harbin Engineering University,2012.(in Chinese)
[5]劉瓊.直流伺服系統模型及其辯識[J].電氣傳動自動化,2012,34(6):18-21.Liu Q.The model and identification of DC servo system [J].Electric Drive Automation,2012,34(6):18-21.(in Chinese)
[6]張升.永磁無刷直流電機速度控制與模型參數辯識研究[D].北京:北方工業大學,2013.Zhang S.Speed control and model parameters identification study of permanent magnet brushless DC motor[D].Beijing:North China University of Technology,2013.(in Chinese)
[7]王建峰,張天宏.基于 MATLAB/XPC的直流電機參數辯識及雙閉環控制研究[J].測控技術,2011,30(12):32-36.Wang J F,Zhang T H.Study on parameter identification of DC motor and double closed loop control based on MATLAB/XPC [J].Measurement & Control Technology,2011,30(12):32-36.(in Chinese)
[8]魏彤,郭蕊.自適應卡爾曼濾波在無刷直流電機系統辯識中的應用[J].光學精密工程,2012,20(10):2308-2314.Wei T,Guo R.Application of adaptive Calman filter in Brushless DC motor system identify-cation[J].Optics and Precision Engineering,2012,20(10):2308-2314.(in Chinese)
[9]喻冬梅,幸明強,汪建兵.無刷直流電動機Tm和Tl測量方法[J].艦船科學技術,2011,33(10):86-88.Yu T M,Xing M Q,Wang J B.Brushless DC motor Tmand Tlmeasurement method[J].Ship Science and Technology,2011,33(10):86-88.(in Chinese)
[10]潘先喜.永磁同步電機的伺服控制系統研究與實現[D].武漢:武漢理工大學,2011.Pan X X.Research and implementation of control system of permanentmagnet synchronous motor servo[D].Wuhan:Wuhan University of Technology,2011.(in Chinese)
[11]李焱,曹立華,王弟男.慣導平臺下艦載光電搜索跟蹤系統的控制[J].光學精密工程,2011,19(5):1126-1123.Li Y,Cao L H,Wang D N.Controlling of shipborne optoelectronic searching and tracking system based on inertial navigation platform [J].Optics and Precision Engineering,2011,19(5):1126-1133.(in Chinese)
[12]李焱,陳濤,曹立華.艦載光電設備跟蹤掠海目標的控制[J].光學精密工程,2010,18(5):936-941.Li Y,Chen T,Cao L H.Control of ship-based optoelectronic equipment for tracking near-sea targets[J].Opticsand Precision Engineering,2010,18(5):936-941.(in Chinese)
[13]趙磊,王學亮,鞏巖.基于FPGA的液晶顯示屏測試用標準白場裝置[J].液晶與顯示,2014,29(1):94-100.Zhao L,Wang X L,Gong Y.FPGA based white field apparatus for LCD calibration[J].Chinese Journal of Liquid Crystals and Displays,2014,29(1):94-100.(in Chinese)
[14]趙梓權,王瑞光,鄭喜鳳,等.LED顯示屏的色域校正[J].液晶與顯示,2013,28(1):92-98.Zhao Z Q,Wang R G,Zheng X F,et al.Color Gamut correction of LED Displays[J].Chinese Journal of Liquid Crystals and Displays,2013,28(1):92-98.(in Chinese)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
通信電源技術(2018年3期)2018-06-26 06:33:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46