一種具有容錯功能的開關(guān)磁阻電機初始位置估計方法
2014-11-25 09:34:54王云林張云龍
電工技術(shù)學(xué)報 2014年7期
張 磊 劉 闖 王云林 張云龍
(南京航空航天大學(xué)自動化學(xué)院 南京 210016)
1 引言
開關(guān)磁阻電機(Switched Reluctance Motor,SRM)具有結(jié)構(gòu)簡單堅固、無永磁材料、成本低、控制靈活、容錯能力強等特點,在航空航天、電動汽車、牽引提升等領(lǐng)域具有很好的前景。但在實際應(yīng)用中,都需要位置傳感器獲取轉(zhuǎn)子的位置信息,這不僅會增加系統(tǒng)的成本和復(fù)雜度,而且也降低了系統(tǒng)的可靠性,因此,研究無位置傳感器技術(shù)具有十分重要的實際意義。
近年來,國內(nèi)外學(xué)者對開關(guān)磁阻電機無位置傳感器技術(shù)進(jìn)行了廣泛的研究,從靜止位置、低速、中高速提出了很多方法,文獻(xiàn)[1-4]利用電機相電感與轉(zhuǎn)子位置之間的關(guān)系,研究在低速情況下通過注入高頻脈沖估計轉(zhuǎn)子的位置信號。文獻(xiàn)[5-9]利用SRM 的電磁特性、轉(zhuǎn)子位置、相電流之間的關(guān)系,通過查表、智能算法、以及觀測器等方法實現(xiàn)電機的位置估計。文獻(xiàn)[10]利用位置檢索脈沖來估計轉(zhuǎn)子轉(zhuǎn)速和位置信號,并對無位置傳感器容錯技術(shù)進(jìn)行了研究。文獻(xiàn)[11-18]對SRM 初始位置估計進(jìn)行了研究,其中文獻(xiàn)[11-14]通過對SRM 各相繞組同時注入高頻脈沖,通過比較脈沖電流峰值的大小來判斷轉(zhuǎn)子的初始位置,該方法算法簡單,但忽略了電感最大和最小區(qū)域因電感變化微小給位置估計帶來的誤差。文獻(xiàn)[15]在文獻(xiàn)[11-14]的基礎(chǔ)上對預(yù)估相的選取進(jìn)行了魯棒分析,提高位置估計的精度。文獻(xiàn)[16]提出通過脈沖電流到達(dá)給定閾值的時間來判斷位置估計相,方法簡單易于實現(xiàn)。文獻(xiàn)[17,18]利用自舉電路中的電容充電電流幅值與相電感的關(guān)系估計SRM 的初始位置。文獻(xiàn)[19]提出全周期電感法實現(xiàn)無位置傳感器初始定位和起動控制,并對起動運行進(jìn)行了缺相容錯研究。
從國內(nèi)外文獻(xiàn)看,針對SRM 無位置傳感器技術(shù)研究,目前主要是針對電機運行在正常狀態(tài)下提出的位置估計策略,而在電機出現(xiàn)故障狀態(tài)下的無位置傳感器技術(shù)研究很少,特別是在故障狀態(tài)下SRM 初始位置判斷還未見文獻(xiàn)報道,所以,如何保證電機在故障狀態(tài)下仍然能正常無反轉(zhuǎn)起動是提高電機傳動系統(tǒng)容錯能力的關(guān)鍵。
本文提出一種雙電流閾值電感分區(qū)的開關(guān)磁阻電機初始位置估計方法。該方法能夠解決在電感最大和最小區(qū)域因電感變化微小而降低了處理器處理精度的問題。同時,為了提高電機起動的可靠性,本文對電機缺相容錯狀態(tài)下的初始位置估計也進(jìn)行了研究,通過實驗驗證了所提方法的可行性。
2 雙電流閾值電感分區(qū)基本原理
2.1 相電感分區(qū)策略
本文樣機為12/8 結(jié)構(gòu)的三相開關(guān)磁阻電機,電機一個電感周期為 360°(本文中的角度都為電角度),將一個電感周期均分為6 個分區(qū),每個分區(qū)為60°,其中,電感最大和最小區(qū)域分別為一個分區(qū)(見圖1),從圖1 可以看出,在任何一個分區(qū)里都有一相電感為上升區(qū)、一相電感為下降區(qū)、而另一相電感不是處在最大區(qū)域,就是處在最小區(qū)域。以C相為例,電角度為[150°,210°]∪[330°,390°]區(qū)域分別為電感最大區(qū)域和最小區(qū)域,電角度在[210°,330°]區(qū)域為電感下降區(qū)域,電角度在[30°,150°]區(qū)域為電感上升區(qū)域,其他兩相分區(qū)范圍如此相同。
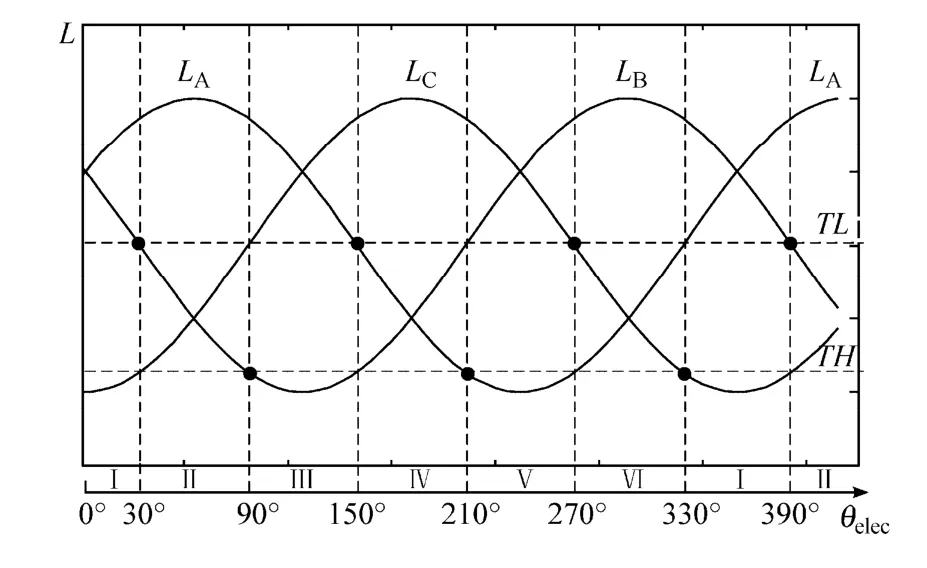
圖1 三相電感分區(qū)Fig.1 The inductance subregion
2.2 初始分區(qū)估計策略
忽略反電動勢和繞組電阻壓降,脈沖電流與相電感成反比關(guān)系,圖2 給出SRM 慣性運行下,同時對三相繞組注入高頻脈沖得到的脈沖電流波形,根據(jù)2.1 論述的電感分區(qū)策略,得到三相脈沖電流的6 個分區(qū)(見圖2),由于在脈沖電流最大和最小區(qū)域,脈沖電流變化微小,所以要在該區(qū)域利用脈沖電流來估計轉(zhuǎn)子位置精確度不高,因此,需要通過選擇脈沖電流的閾值來選擇合適的估計相,以減小位置估計的誤差。

圖2 脈沖電流及分區(qū)Fig.2 The pulse current and subregion
依據(jù)電感和脈沖電流的6 個分區(qū)來設(shè)定雙電流閾值的位置,本文將低電流閾值TL 選定在電角度30°位置,高電流閾值TH 選定在電角度90°位置,利用估計相的脈沖電流峰值分別與TH、TL 比較,判斷轉(zhuǎn)子的初始分區(qū)和初始起動相,由此得到表1的初始分區(qū)判斷邏輯。例如,如果B 相脈沖電流峰值iB_peak<TL,且A 相脈沖電峰值iA_peak<TL,則判斷轉(zhuǎn)子初始分區(qū)為I,即A 相為初始起動相;如果C 相脈沖電流峰值TL<iC_peak<TH,并且B 相脈沖電流峰值TL<iB_peak<TH,則判斷轉(zhuǎn)子初始分區(qū)為II,即C 相為初始起動相。其他初始分區(qū)的判斷如此類推(見表1)。特別說明的一點是:該方法始終是選擇脈沖電流處在上升和下降區(qū)域的相為估計相,所以位置估計的精度高,以初始分區(qū)I 為例說明,該區(qū)域A 相和B 相為估計相,C 相為非估計相,因為C 相脈沖電流處在最大區(qū)域,相脈沖電流變化微小,而A 相和B 相脈沖電流處在電感上升和下降階段,脈沖電流變化率大,所以用A 相和B 相作為估計相估計出來的初始分區(qū)分辨率高,估計誤差小。其他分區(qū)也是同樣道理。

表1 初始位置分區(qū)估計Tab.1 Initial rotor position estimation
3 轉(zhuǎn)子初始位置角估計
3.1 初始位置角估計模型的建立
繞組電感與脈沖電流成反比,靜止?fàn)顟B(tài)向繞組注入高頻脈沖,每個脈沖電流峰值為

式中 U ——直流母線電壓;
L(θ)——相電感;
Δt——脈沖時間。
在閉環(huán)控制系統(tǒng)中,需要知道轉(zhuǎn)子的確切初始位置角,本文通過對電機初始分區(qū)的判斷再結(jié)合脈沖電流峰值包絡(luò)線與位置角之間的關(guān)系模型θ-ipeak來估算轉(zhuǎn)子初始位置角。
圖3 是脈沖電流峰值包絡(luò)線曲線示意圖,圖中實線部分為估計相的脈沖電流包絡(luò)線。為了建立脈沖電流峰值包絡(luò)線與位置角之間的關(guān)系模型θ-ipeak,只需實測任一個相的脈沖電流峰值包絡(luò)線,為了方便分析不同區(qū)域的數(shù)據(jù),本實驗實測C 相半電感周期[180°,360°]的脈沖電流,通過向C 相繞組注入高頻脈沖信號,每隔2°實測一對數(shù)據(jù),利用式(1)計算出該位置下的脈沖電流峰值ipeak,圖4是實測的θC-ipeak關(guān)系曲線。從圖中可以看出在[210°,330°]之間曲線上測試點較細(xì),越到兩端越密,所以利用[210°,330°]之間的脈沖電流峰值估計位置誤差較小,這與前面估計相的選擇分析相一致。

圖3 三相脈沖電流峰值包絡(luò)線與分區(qū)關(guān)系Fig.3 Relationship between amplitude of pulse current and inductance subregion
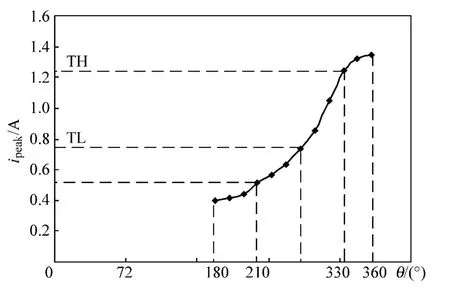
圖4 實測的脈沖電流峰值與位置關(guān)系Fig.4 Relationship between peak current and position
為了建立脈沖電流峰值包絡(luò)線與位置角之間的關(guān)系模型,采用曲線擬合的方法,考慮便于微處理器計算和算法的簡單,本文選擇多相式擬合方法求得θ-ipeak的數(shù)學(xué)模型

為了得到更高的擬合精度,圖5 給出了從4 階到8 階多項式函數(shù)擬合的誤差曲線,綜合比較各階數(shù)的誤差曲線,在[210°,330°]之間,階數(shù)n=8 擬合誤差最小,所以本文選擇階數(shù)n=8 來擬合脈沖電流峰值包絡(luò)線與位置角之間的數(shù)學(xué)模型。

圖5 不同階數(shù)n 的擬合誤差Fig.5 Fitting error different orders
3.2 轉(zhuǎn)子初始位置角估計方法
根據(jù)表1 判斷出轉(zhuǎn)子的初始分區(qū),再選擇對應(yīng)的估計相脈沖電流峰值包絡(luò)線與位置角θ-ipeak關(guān)系模型估算初始位置角。三相脈沖電流峰值包絡(luò)線為周期性的分段函數(shù),每相脈沖電流峰值包絡(luò)線上升曲線之間相差120°,下降曲線之間也相差120°,所以三相脈沖電流峰值θ-ipeak初始位置角度估計模型為

θ-ipeak關(guān)系模型的選擇是依據(jù)電機初始分區(qū)而定,但在任一初始分區(qū)都有兩相估計相。如轉(zhuǎn)子在初始分區(qū)I 為例,從圖1 電感分區(qū)可以看出,在該分區(qū)里A 相和B 相可以作為估計相。但在[330°,360°]之間,B 相電感接近電感最大區(qū)域,電感變化率絕對值逐漸變?yōu)樽钚。鳤 相電感處在電感上升階段,電感變化率大,所以轉(zhuǎn)子在[330°,360°]之間選擇A 相θA-ipeak關(guān)系模型來估算初始位置角的精度要比選擇θB-ipeak關(guān)系模型高,即A 相作為估計相;同理,轉(zhuǎn)子在[360°,390°]之間選擇B 相θB-ipeak關(guān)系模型估算初始位置角的精度比選擇θA-ipeak關(guān)系模型高,即B 相作為估計相。而這兩個區(qū)間的判別可通過比較A、B 兩相脈沖電流峰值大小確定,當(dāng)iA_peak>iB_peak,轉(zhuǎn)子在[330°,360°]之間,當(dāng)iA_peak<iB_peak,轉(zhuǎn)子在[360°,390°]之間。其他初始分區(qū)對應(yīng)的θ-ipeak關(guān)系模型的選擇與此道理相同,此處不再贅述,見表2。

表2 初始分區(qū)和θ-ipeak的選擇Tab.2 Initial subregion and θ-ipeak
4 缺相容錯狀態(tài)初始位置估計
雙電流閾值電感分區(qū)初始位置估計方法需要三相脈沖電流信息實現(xiàn)分區(qū)和估計相的選擇,當(dāng)電機發(fā)生缺相故障時,故障相的脈沖電流無法得到,所以,上述方法可能失效,為了滿足系統(tǒng)缺相容錯運行的要求,本文通過正常相脈沖電流信息間接估計初始位置角,并在靜止和慣性運行狀態(tài)下,對電機缺相運行初始位置角估計進(jìn)行了實驗研究。
當(dāng)A 相缺相,A 相脈沖電流為零,此時利用正常相B 相和C 相脈沖電流峰值與雙電流閾值比較來判斷初始分區(qū)。從圖2 可以看出,如果iC_peak>TH,可判斷初始分區(qū)為I,如果iB_peak>TH,判斷初始分區(qū)為III,如果TL<iC_peak<TH,TL<iB_peak<TH,可判斷初始分區(qū)為II,如此類推,其他初始分區(qū)同樣可以由B 相和C 相判斷出來,不需要A 相脈沖電流信息參與判斷。因為在任一個分區(qū)里都有兩相θ-ipeak關(guān)系模型可選,所以在電機缺一相故障運行下不影響θ-ipeak關(guān)系模型的選擇,表3 給出了電機發(fā)生缺A 故障運行情況下初始分區(qū)判斷和θ-ipeak關(guān)系模型選擇邏輯表。當(dāng)B 相或C 相發(fā)生缺相故障時,同樣可以用另外兩相正常相來完成初始位置角估計,理論與此相同。

表3 缺A 相初始位置估計方法Tab.3 Initial position estimation lacking phase A
5 實驗驗證
為驗證本文方法的可行性,在一臺12/8 結(jié)構(gòu)SRM 樣機上進(jìn)行了實驗,實驗平臺如圖6 所示。其中樣機額定功率 1.5kW、額定轉(zhuǎn)速1 500r/min。A為輔助電源、B 為dSPACE 主控系統(tǒng)、C 為采樣、保護(hù)與調(diào)理電路、D 為功率變換器、E 為機械分度頭、F 為12/8 結(jié)構(gòu)的開關(guān)磁阻電機。

圖6 實驗平臺Fig.6 Experiment platform
本試驗中,母線電壓10V,低電流閾值TL 為0.564A,高電流閾值TH 為1.175A,脈沖注入頻率為1kHz,占空比為40%。
5.1 靜止時初始位置估計
圖7 是電機分別靜止在17°和26°位置時轉(zhuǎn)子初始位置角估計的實驗波形。從圖7a 可以看出,實驗得到iB_peak<TL,iC_peak<TL,iB_peak<iC_peak根據(jù)表1 給出的初始分區(qū)估計策略,可以判斷轉(zhuǎn)子當(dāng)前初始分區(qū)為V,再依據(jù)表2 和iB_peak<iC_peak,可選擇C 相脈沖電流峰值包絡(luò)線θC-ipeak關(guān)系模型來估算轉(zhuǎn)子初始位置角,實驗估算出的轉(zhuǎn)子初始位置角(θest)為17.32°,與實際轉(zhuǎn)子初始位置角相差只有0.32°。從圖7b 可以看出,實驗得到iB_peak<TL,iA_peak<TL,iB_peak<iA_peak,依據(jù)表1 判斷出轉(zhuǎn)子當(dāng)前初始分為I,再由表2 和iB_peak<iA_peak,選擇A相脈沖電流幅值包絡(luò)線θA-ipeak關(guān)系模型來估算轉(zhuǎn)子初始位置角,實驗估算出的轉(zhuǎn)子初始位置角度(θest)為25.69°,與實際轉(zhuǎn)子初始位置角相差0.31°。由實驗看出轉(zhuǎn)子在17°和26°位置上估計出的初始位置角誤差幾乎相同,這是因為所選擇的估計相C 相和A 相在這兩個位置上是對稱的,電感相同,電感的變化率也相同。表4 是轉(zhuǎn)子靜止在不同位置下的初始位置角估計誤差,從誤差數(shù)據(jù)看出,所有初始位置的估計誤差最大不超過0.51°,因此可以實現(xiàn)電機無反轉(zhuǎn)起動。
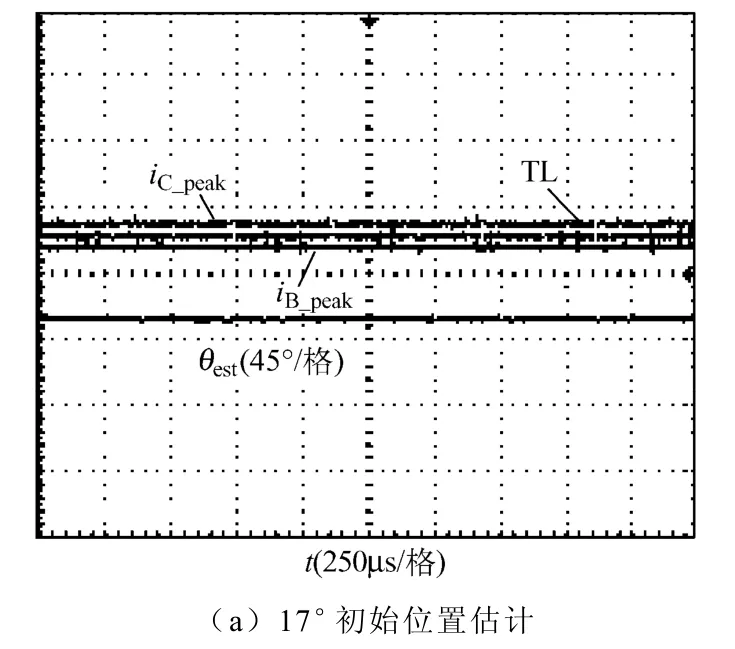

圖7 靜止時轉(zhuǎn)子初始位置角估計Fig.7 Initial position estimation at standstill

表4 不同初始位置角下的估計誤差Tab.4 Different initial position estimation errors(單位:°)
5.2 慣性運行狀態(tài)初始位置估計
電機在運行中可能存在一些特殊情況,需要關(guān)斷開關(guān)管,但電機由于慣性還繼續(xù)運行,如果在電機還沒有靜止時需要再次起動電機,在開通開關(guān)管之前電機繞組上沒有電流,同樣可以采用本文的方法估計電機初始位置角,向各相同時注入脈沖,比較各相脈沖電流峰值與雙電流閾值大小,判斷轉(zhuǎn)子初始分區(qū),根據(jù)初始分區(qū)選擇相應(yīng)的θ-ipeak關(guān)系模型來估計轉(zhuǎn)子的初始位置角。圖8 給出電機初始轉(zhuǎn)速為288r/min 時三相脈沖電流和初始位置角估計波形。從實驗波形可以看出,在電機慣性運行狀態(tài)時,該方法同樣可以估計出初始位置信息,在電機頻繁起制動環(huán)境下具有很好的適用性。

圖8 初始轉(zhuǎn)速288r/min 位置估計Fig.8 Initial position estimation at 288r/min
5.3 缺相靜止時初始位置估計
當(dāng)電機發(fā)生缺相故障時,電機進(jìn)入缺相運行狀態(tài),此時可根據(jù)第4 節(jié)所論述的電機缺相故障初始位置估計策略實現(xiàn)容錯位置估計。圖9 是缺相故障下電機靜止在8°位置時初始位置估計實驗波形,從圖9a 實驗波形可以看出,當(dāng)A 相缺相以后,A 相的脈沖電流為零,只能由B 相和C 相作為位置估計相,實驗測得B 相的脈沖電流峰值iB_peak=0.832A,C 相脈沖電流峰值iC_peak=0.375A,實驗中高電流閾值TH 為1.175A,低電流閾值TL 為0.564A,所以TL<iB_peak<TH、iC_peak<TL,根據(jù)表3 缺相故障初始位置估計方法,判斷出轉(zhuǎn)子初始分區(qū)為IV,選擇B 相脈沖電流峰值包絡(luò)線與位置角的θ-ipeak關(guān)系模型來估算轉(zhuǎn)子的初始位置角,實驗估算出初始位置角度θest=8.32°,估計誤差只有0.32°。圖9b 是缺C相故障狀態(tài)的實驗波形,從實驗波形可以看出,A相脈沖電流峰值iA_peak=1.032A,測得的B 相脈沖電流峰值 iB_peak與缺 A 相情況下測得的值相同為0.832A,所以TL<iB_peak<TH、TL<iA_peak<TH,從而判斷轉(zhuǎn)子初始分區(qū)為IV,同樣選擇B 相脈沖脈沖電流峰值包絡(luò)線與位置角的θ-ipeak關(guān)系模型來計算轉(zhuǎn)子的初始位置角,估算得到θest=8.32°。所以,電機在缺任意一相故障下,該方法仍能通過其他正常相估計出電機的初始位置角。

圖9 缺相靜止?fàn)顟B(tài)初始位置估計Fig.9 Initial position estimation under lacking-phase and standstill
5.4 缺相慣性運行初始位置估計
當(dāng)電機缺相慣性運行時,本文所提的缺相故障初始位置估計方法同樣可以適應(yīng),各相同時注入脈沖,檢測正常相的脈沖電流峰值信息,根據(jù)第4 節(jié)所論述的方法實現(xiàn)初始位置角估計。圖10 給出電機在不同慣性速度下缺相運行的初始位置估計實驗波形。其中,圖10a 和圖10b 為缺A 相故障下初始位置估計實驗波形,圖10c 和圖10d 為缺B 相故障下的初始位置估計實驗波形,從實驗波形可以看出,電機從正常慣性運行到缺相慣性運行切換時,系統(tǒng)仍可以通過正常相的脈沖電流信息較好地實現(xiàn)初始位置角的估計,并且切換很平穩(wěn),能夠?qū)崿F(xiàn)電機無反轉(zhuǎn)起動。

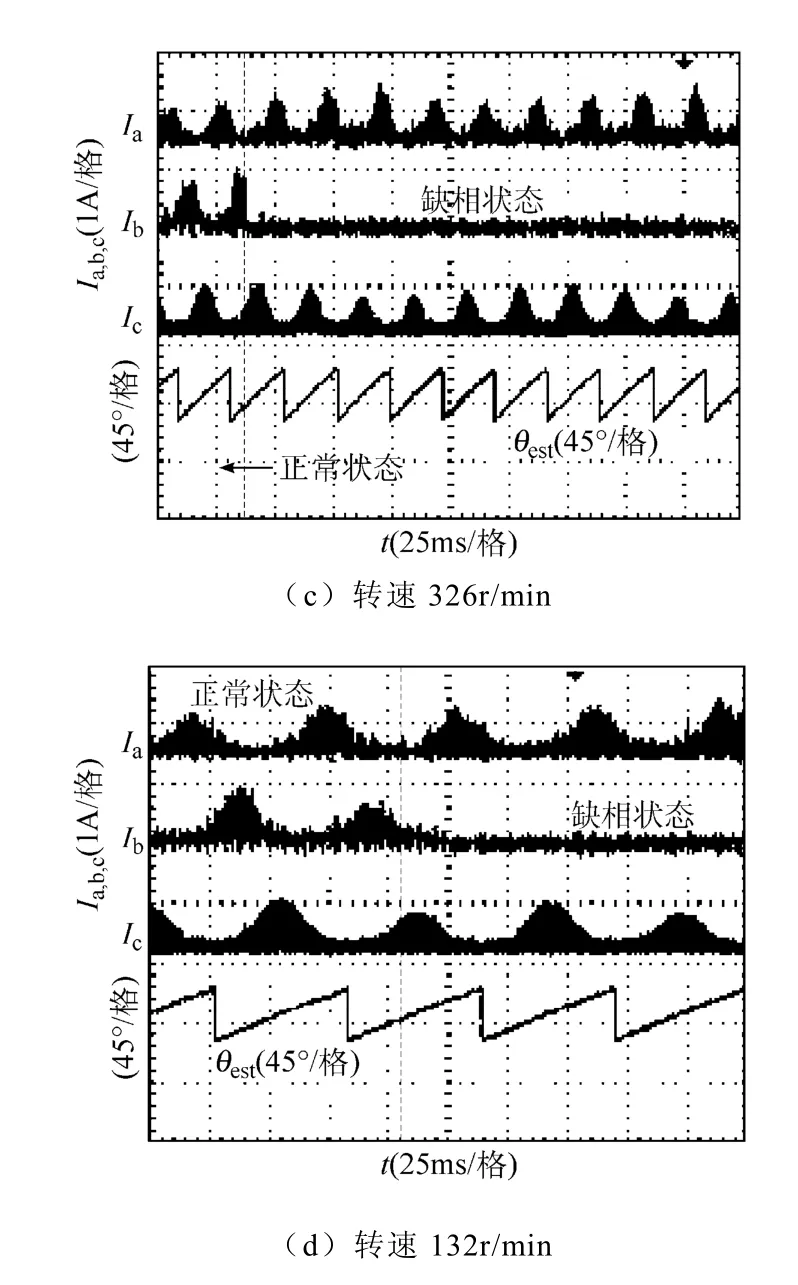
圖10 缺相慣性運行初始位置估計Fig.10 Initial position estimation under lacking-phase and initial position
6 結(jié)論
本文提出一種基于雙電流閾值的電感分區(qū)初始位置估計方法,利用脈沖電流峰值與位置角度的關(guān)系模型估算轉(zhuǎn)子的初始位置角,該方法具有以下特點:
(1)無需增加系統(tǒng)的硬件資源,算法簡單,易于實現(xiàn),可適應(yīng)不同定轉(zhuǎn)子結(jié)構(gòu)的開關(guān)磁阻電機,具有很強的通用性。
(2)將雙電流閾值與電感分區(qū)以及脈沖注入相結(jié)合,提高了轉(zhuǎn)子初始位置角度估計的精度。
(3)通過對靜止、慣性運行、缺相故障三個狀態(tài)下實驗,驗證了本文所提出的無位置傳感器技術(shù)SRM 初始位置估計方法的有效性和實用性。
[1]Khalil A,Husain I.Four quadrant sensorless operation of a switched reluctance machine using fourier model[C].Power Electronics Specialists Conference,PESC '06,2006:1-8.
[2]Ahmed Khalil,Iqbal Husain.Four-quadrant pulse injection and sliding-mode-observer-based sensorless operation of a switched reluctance machine over entire speed range including zero speed[J].IEEE Transactions on Industry Applications,2007,43(3):2007:714-723.
[3]辛凱.開關(guān)磁阻電機滑模觀測器間接位置檢測研究[D].武漢:華中科技大學(xué),2007.
[4]李景男,王旭東,周永琴.基于兩相脈沖激勵的開關(guān)磁阻電動機無位置傳感器轉(zhuǎn)子位置檢測[J].電機與控制學(xué)報,2002,6(1):6-9.Lin Jingnan,Wang Xudong,Zhou Yongqin.Sensorless rotor position detection of SRM based on voltage pulses to two phase[J].Electric Machines and Control,2002,6(1):6-9.
[5]邱亦慧,詹瓊?cè)A,馬志源.基于簡化磁鏈法的開關(guān)磁阻電機間接位置檢測[J].中國電機工程學(xué)報,2001,21(10):59-62.Qiu Yihui,Zhan Qionghua,Ma Zhiyuan.The indirect position sensing of SRM on the basis of simplified flux method[J].Proceedings of the CSEE,2001,21(10):59-62.
[6]鄭洪濤,蔣靜坪,徐德鴻,等.開關(guān)磁阻電動機無位置傳感器能量優(yōu)化控制[J].中國電機工程學(xué)報,2004,24(1):153-157.Zheng Hongtao,Jiang Jingping,Xu Dehong,et al.Switched reluctance motor sensorless drive with energy optimizing control strategy strategy[J].Proceedings of the CSEE,2004,24(1):153-157.
[7]李珍國,李彩紅,闞志忠,等.基于改進(jìn)型簡化磁鏈法的開關(guān)磁阻電機無位置傳感器速度控制[J].電工 技 術(shù) 學(xué) 報,2011,26(6):62-66.Li Zhenguo,Li Caihong,Kan Zhizhong,et al.Switched reluctance motor sensorless speed control based on the improved simplified flux method[J].Transactions of China Electrotechnical Society,2011,26(6):62-66.
[8]夏長亮,王明超,史婷娜,等.基于神經(jīng)網(wǎng)絡(luò)的開關(guān)磁阻電機無位置傳感器控制[J].中國電機工程學(xué)報,2005,25 (13):123-128.Xia Changliang,Wang Mingchao,Shi Tingna,et al.Position sensorless control for switched reluctancemotors using neural network[J].Proceedings of the CSEE,2005,25 (13):123-128.
[9]夏長亮,謝細(xì)明,史婷娜.開關(guān)磁阻電機小波神經(jīng)網(wǎng)絡(luò)無位置傳感器控制[J].電工技術(shù)學(xué)報,2008,23(7):33-38.Xia Changliang,Xie Ximing,Shi Tingna.Position sensorless control of switched reluctance motor using wavelet neural networks[J].Transactions of China Electrotechnical Society,2008,23(7):33-38.
[10]蔡駿,鄧智泉.一種具有容錯功能的開關(guān)磁阻電機無位置傳感器控制方法[J].中國電機工程學(xué)報,2012,32(36):109-116.Cai Jun,Deng Zhiquan.A fault-tolerant sensorless control method for switched reluctance motor drives[J].Proceedings of the CSEE,2012,32(36):109-116.
[11]Gao H,Salmasi F R,Ehsani M.Senorless control of SRM at standstill[C].In Proc.APEC’00,2000:850-856.
[12]Gao Hongwei.Sensorless control of the switched reluctance motor drive at standstill and near-zero speed[D].Texas:Texas A&M University,2001.
[13]Krishnamurthy M,Edrington C S,Fahimi B.Prediction of rotor position at standstill and shaft condition in switched reluctance machines[J].IEEE Transactions on Power Electronics,2006,21(1):225-233.
[14]Amiri H,Afjei E,Ataei S.A novel sensorless technique for a new field assisted switched reluctance motor[C].International Symposium on Power Electronics,Electrical Drivers,Automation and Motion,2008:1077-1081.
[15]劉衛(wèi)國,宋受俊,Wue Sweafer.無位置傳感器開關(guān)磁阻電機初始位置檢測方法[J].中國電機工程學(xué)報,2009,29(24):91-97.Liu Weiguo,Song Shoujun,Wue Sweafer.Initialposition estimation of sensorless switched reluctance motor[J].Proceedings of the CSEE,2009,29(24):91-97.
[16]Krishnamurthy M,Edrington C C,Fahimi B.Prediction of rotor position at standstill and rotating shaft conditions in switched reluctance machines[J].IEEE Transactions on Power Electronics,2006,21(1):225-233.
[17]Shen L,Wu J H,Yang S Y.Initial position estimation in SRM using bootstrap circuit without predefined inductance parameters[J].IEEE Transactions on Power Electronics,2011,26(9):2449-2456.
[18]沈磊,吳建華,楊仕友.基于自舉電路的開關(guān)磁阻電機初始位置估計方法[J].中國電機工程學(xué)報,2011,31(6):98-102.Shen Lei,Wu Jianhua,Yang Shiyou.A novel estimation method for initial position of switched reluctance motor based on bootstrap circuit[J].Proceedings of the CSEE,2011,31(6):98-102.
[19]蔡駿,鄧智泉.基于全周期電感法的開關(guān)磁阻電機無位置傳感器技術(shù)[J].電工技術(shù)學(xué)報,2013,28(2):145-153.Cai Jun,Deng Zhiquan.Sensorless control of switched reluctance motor based on full-cycle inductance method[J].Transations of China Electrotechnical Society,2013,28(2):145-153.
