基于電流信息的電機回轉偏心檢測方法
2014-11-25 09:35:16徐光華董家成
電工技術學報 2014年7期
劉 飛 梁 霖,2 徐光華,3 董家成
(1.西安交通大學機械工程學院 710049 西安
2.西安交通大學現代設計及轉子軸承系統教育部重點實驗室 710049 西安3.西安交通大學機械制造系統工程國家重點實驗室 710054 西安)
1 引言
電機回轉精度是衡量驅動設備動態精度的一個重要指標。傳統方法采用測量軸端端跳作為電機靜態回轉精度值,這種方法在一定程度上可以滿足工業現場的需要。但是,在高速驅動、精密加工設備中,只檢測驅動電機回轉靜態精度其適用范圍存在著較大的局限性,必須對電機動態回轉精度進行測量與控制。對于伺服電機來說,轉子的運動直接影響到電機氣隙磁場的分布,這就為利用電流信息檢測電機的回轉精度提供了可能。
高速切削狀態下,伺服電機的回轉精度直接影響到其加工質量,因此對電機動態回轉精度的檢測對提高加工性能具有重要意義。本文通過分析電機轉子回轉波動在定子電流中的表現機理,提出利用定子反饋電流信號檢測電機回轉偏心的方法。通過分析電機回轉精度在定子反饋電流信息中的表現特征,利用電流信號幅頻特征與轉子偏心量的關系,建立起電機回轉偏心的測量模型。這種方法較好的解決了外置傳感器信號受電機磁場干擾的問題,可以提高對電機動態回轉精度檢測的可靠性與穩定性。
2 電機回轉偏心模型
2.1 電機回轉偏心的數學模型
在理想情況下,電機轉子回轉運動的中心應該與定子截面中心重合。但是由于運動誤差和裝配誤差,會使回轉中心偏離定子截面中心,在單截面上就表現為實際回轉中心與理想回轉中心的偏離,即回轉偏差。
電機回轉偏差有靜偏心和動偏心兩類。靜偏心是由電機定子鐵心的形狀誤差、加工裝配誤差引起的。在轉軸剛度足夠的情況下,靜態偏心的大小不會變化。動態偏心是由于氣隙磁場的最小位置在不斷變化引起的。在實際回轉過程中,兩種偏心通常是同時存在[1]。
電機回轉偏心建模如圖1 所示,設R 與r 分別表示定、轉子的半徑,轉子中心和定子中心(理想回轉中心)有長度為d 的位移量,則氣隙長度的大小取決于機械角度α。

圖1 電機回轉偏心建模示意圖Fig.1 Schematic model of motor rotational eccentricity
這里,以靜偏心為例(動態偏心分析可類似得出),選擇中心為轉子中心,則靜偏心g 為

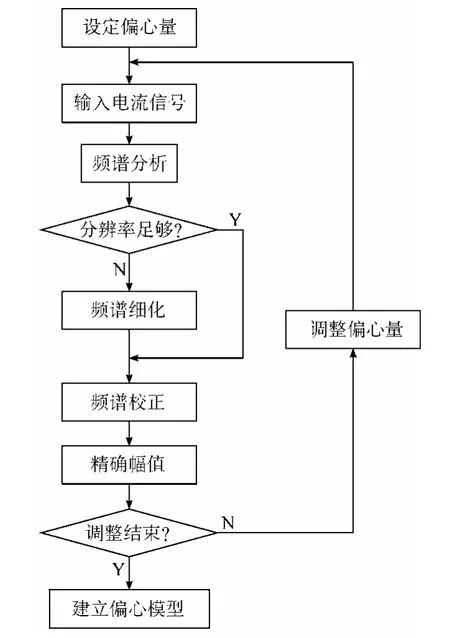
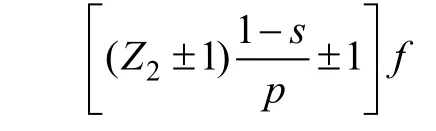
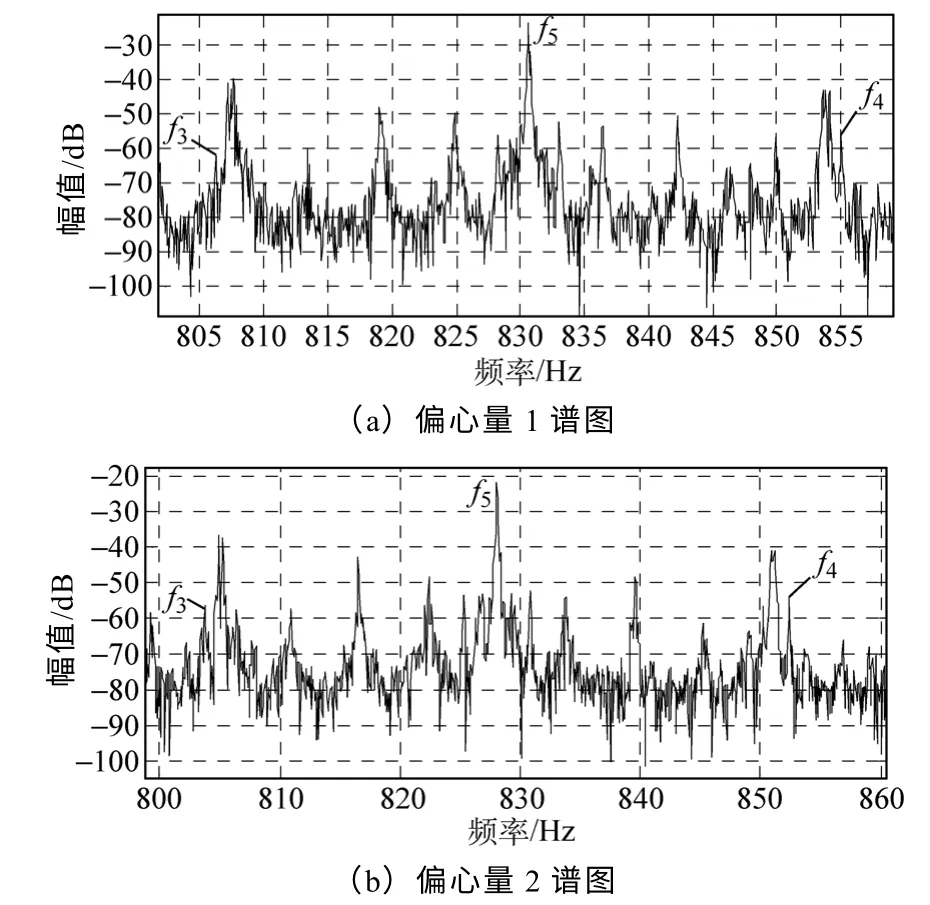
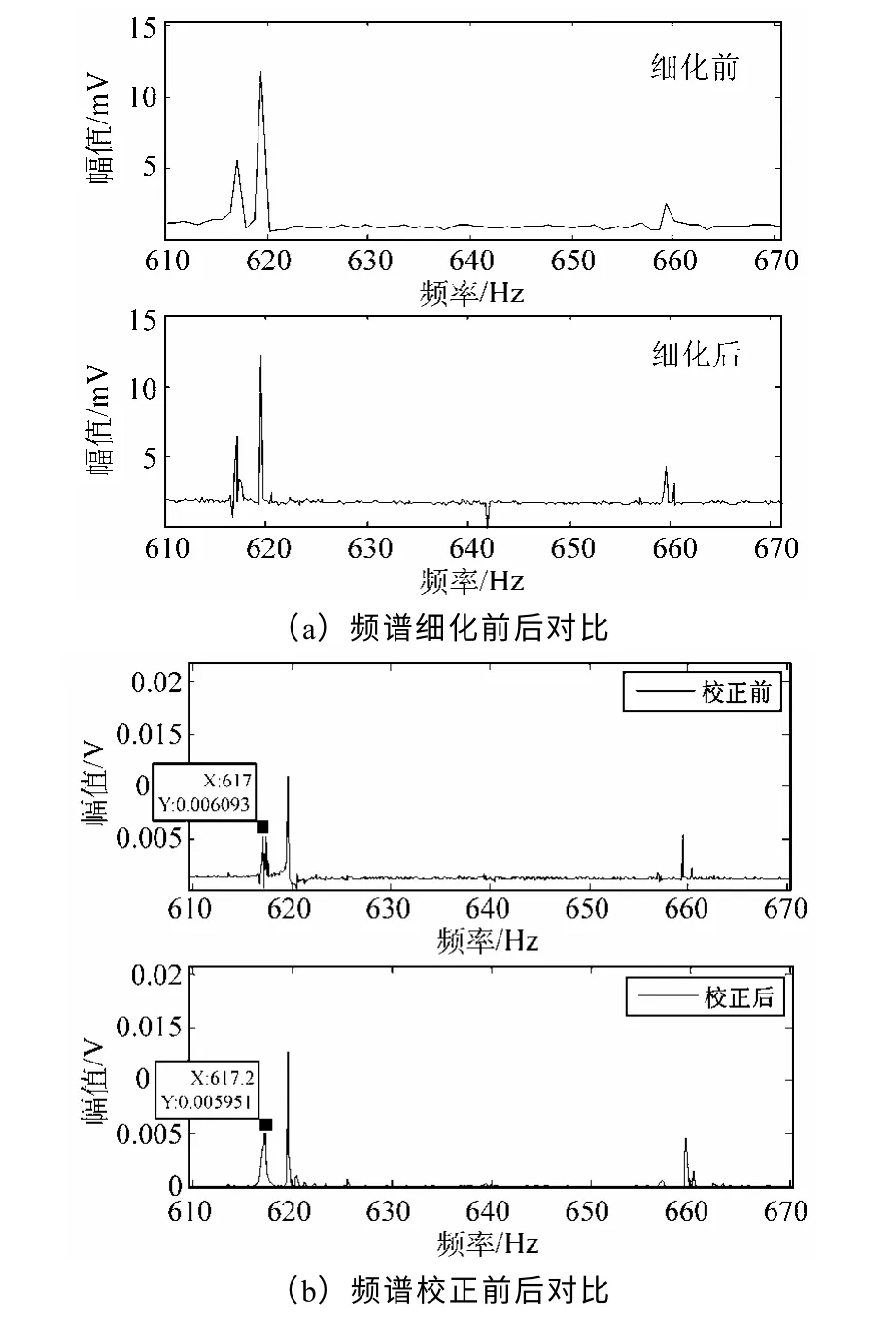
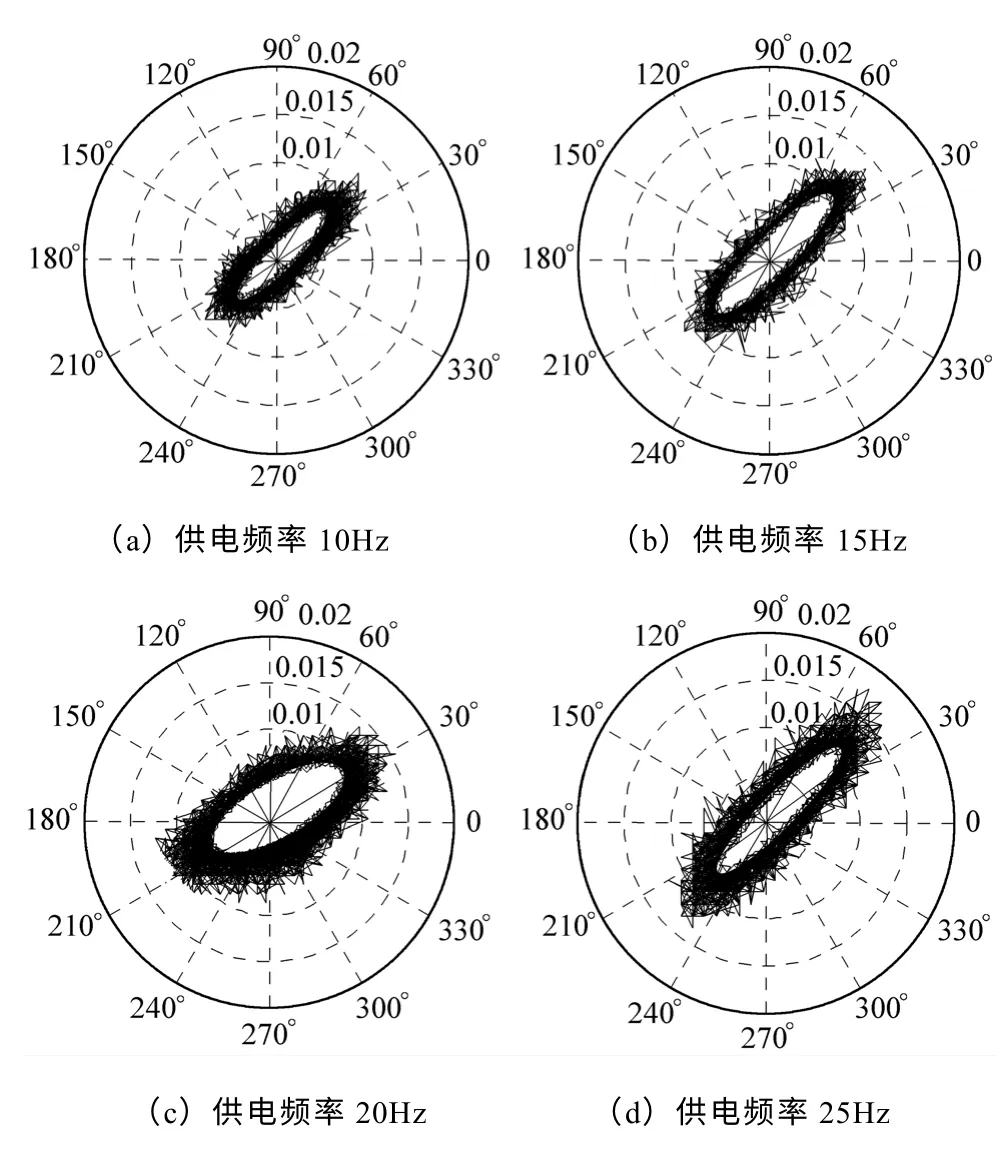
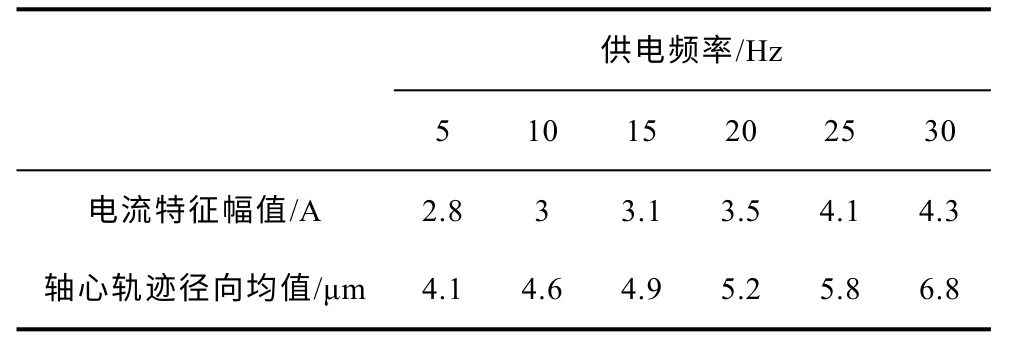
由于d< 由于定轉子開槽的影響,R 與r 可以表示為 式中 S,Z——定子和轉子的槽數; R0,r0——定子和轉子去槽后的半徑; dr,ds——去槽后中心偏置位移量。 由此得出氣隙磁導Ps為 式中 ε——相對偏心率,ε=d/δ。 通過電機回轉偏心的數學模型,分析轉子偏心對氣隙磁通的影響。氣隙磁通等于磁動勢與磁導的乘積。轉子偏心后,使得磁導發生變化,進而影響電機的電感和氣隙磁通密度,最終影響定子電流頻譜中特定的頻率。當轉子偏心后,使氣隙磁導發生變化,假設定轉子表面平滑,則對于靜態偏心,氣隙磁導可表示為[2] 對于動態偏心,氣隙磁導可表示為 式中 P0——氣隙平均磁導; Pn——第n 次磁導的幅值; ωr——電機的角速度; θ——機械角度。 定子電流中感應出相應的特征頻率表達式為 式中 fs——需要被監測的偏心特征頻率; f——電源基波頻率; k——任意整數(通常取1); Z——轉子槽數; nd——偏心級數,nd=1,2,3,…; ns——定子電源中存在的時間諧波級數,ns=±1,±2,±3,…; p——電機極對數; s——轉差率。 通過磁場分析,根據定轉子開槽氣隙磁導和偏心引起的磁導求出聯合磁導分布,確定特征頻率。 偏心的電流特征頻率為 式中 f——電源基頻; Z2——轉子槽數; s——轉差率; p——極對數; v——定子諧波的階數,v=±1,±3,±5,…; nd=0時,得到靜態偏心頻率,nd=1,2,3…時得到動態偏心頻率。 表征電機主軸回轉偏心的特征頻率如式(2)或式(3)所示。 當v=1,nd=0 時,式(3)可簡化為 氣隙磁通的諧波成分在定子電流中能感應出同頻分量,通過檢測特征頻率分量的大小即可判斷電機回轉中心與理想中心的偏差的情況,這就是通過定子電流檢測電機回轉誤差的依據。 同時,對于特征頻率難以分辨,采用頻譜細化的方法解決,通過細化提高頻譜的分辨率,使得特征信號的提取更為明晰。本文對電機回轉偏差特征的分析流程如圖2 所示。 圖2 電機回轉偏心特征提取分析方法Fig.2 Feature extraction approach of motor rotational eccentricity 通過正常電機與偏心電機的對比,說明偏心電機的故障特征,主要是通過采集電機定子電流信號進行分析。 圖3 分別為某交流伺服電機在不同的靜偏心狀態下的頻譜圖。其中,圖3a 為正常狀態,圖3b 和圖3c 分別為30%和60%的靜偏心狀態下的電流譜。電機運行在空載狀態下,則電機轉速接近同步轉速,轉差率s 非常小,靜偏心頻率分量fe為25Hz 和75Hz。 圖3 交流伺服電機電流狀態譜圖Fig.3 Current signal spectrum of AC motor 從圖3 中非常明顯地看出,由于靜偏心的增加,特征頻率25Hz 和75Hz 處的頻率分量增加非常明顯。圖3b 中的25Hz 和75Hz 頻率分量的出現是由于電機的裝配等原因引起的,只不過幅值較小,這也說明在一般的電機中由于各種原因,即使是裝配良好的電機,靜偏心是在所難免的。 式(3)中取nd=0,k=1,v=1,由于空載運行,則計算出電流高頻分量(即主齒諧波)見表1。由表1 可見,隨著偏心量的增加,主齒諧波分量幅值將增加。說明靜偏心故障同時引起了高頻特征頻率分量的變化。 表1 三種狀態頻率幅值對比Tab.1 Comparison chart for three states frequency and amplitude 當電機存在動態偏心時,根據諧波分離理論可知偏心故障的諧波分量可以取主要分量來進行計算,但特征頻率的減少會由于噪聲的影響,產生誤判斷,這里需要注意選取諧波分量的原則:①要保留重要特征頻率;②受噪聲影響較小;③頻率不能離基頻太近,減少泄漏影響;④盡量取整數諧波;⑤高頻部分少取。基于上述原則進行特征選取。 3.2.1 高頻特征頻率 在式(3)中取k=1,v=±1,nd=±1 時,特征頻率為 3.2.2 低頻特征頻率 低頻偏心故障引起的磁通變化,式(4)所示為頻率分量的變化范圍 式中 f——電源頻率; fr——電機轉頻。 當n=1,k=3/p,特征頻率為[1 ±1.5(1 -s)]f 。對于k=±1 的頻率,由于計算出的特征頻率與電源倍頻十分接近,容易受到泄漏的影響。 表2 給出了在兩種轉速下產生的不同的偏心關系,其中偏心量2 對應著較大的偏心狀態,偏心量1對應著較小的偏心狀態(見圖4)。式(3)和式(4)所示的特征頻率可以較好的反映出動偏心,它們分別反映了高頻和低頻分量的變化,采用兩式作為故障的特征頻率是比較理想的。 表2 偏心量與轉差率Tab.2 Eccentric amount and slip ratio 圖4 電機動態偏心量譜圖Fig.4 Spectrogram of motor rotational eccentricity 本文以電機故障模擬臺作為驗證對象,并以此說明基于電流信息的轉子回轉精度特征識別和定量診斷方法。實驗平臺(見圖5)采用Spectra Quest 公司設計的故障仿真器,其提供多種故障電機以供測試。 圖5 電機轉子偏心實驗測試Fig.5 Experimental test of motor rotational eccentricity 本實驗通過變頻器調速,變頻器設置的輸出工頻為20Hz,此時通過轉速傳感器測量的電機輸出轉速供電頻率為18.74Hz。當nd=0,v=1 時,將以上參數代入式(3)可得電機的靜偏心特征頻率為617.2Hz。首先,將采集到的定子電流信號進行頻譜分析得到如圖6 所示,從圖中可以看出,靜偏心特征頻率與工頻的高次諧波很接近;然后,通過頻譜細化提高信號頻譜的分辨率,以利于特征頻率的識別,結果如圖7a 所示;再通過頻譜校正進一步提高分析精度,結果如圖7b 所示。 圖6 電流信號頻譜Fig.6 Spectrogram of current signal 圖7 電機轉子靜偏心頻譜分析結果Fig.7 Spectrum analysis of static eccentricity 由以上分析結果可知,通過頻譜細化和頻譜校正,電機電流的頻譜分析結果得到了明顯改善,頻率分辨率及頻譜分析的精度均得到了增強。當轉子靜偏心程度達到0.1mm 時,靜偏心特征頻率的幅值為0.006。同時,對不同轉速下的電機靜偏心量進行檢測,實驗表明,轉速遞增靜偏心程度也將遞增。 電機動偏心量測試比較復雜,僅僅通過電流傳感器無法準確獲得結果。針對這個問題,本文利用電流傳感器檢測動態偏心的特征頻率與外置位移傳感器檢測轉子軸心軌跡,通過軸心軌跡來判斷轉子動偏心的程度。對于一般工作狀態下,電機的負載是恒定的,且負載波動也是很小,所以利用電機的空載狀態對電機的動偏心進行測試。 設定電機空載運行,電機由變頻器供電,供電頻率為20Hz,測量得到的實際轉頻為19.6Hz。實驗一方面通過電流傳感器測量定子電流信號;另一方面,通過電渦流位移傳感器測量轉子輸出軸的位移信號。 首先按式(3)計算轉子動偏心故障在定子電流中的特征頻率,根據電機參數可以計算出轉子的動偏心特征頻率為646.5Hz。其次,對采集得到的定子電流信號進行頻譜分析,得到圖8 所示結果,從圖中可以明顯看出轉子動偏心的故障特征頻率。 圖8 動偏心電流信號頻譜Fig.8 Spectrum analysis of dynamic eccentricity 對于轉子的實際偏心狀況,通過電渦流位移傳感器進行測量,測量截面軸心的位移量得出轉子的軸心軌跡,通過對軸心軌跡的評估來判斷轉子的動偏心狀況。 轉子軸心軌跡的測量與定子電流的測量是同步進行的,轉子在10Hz、15Hz、20Hz、25Hz 的供電頻率下運行,測量得到轉子的軸心軌跡如圖9 所示。從圖中可以看出,轉子軸心軌跡帶有明顯的方向性,說明轉子存在不平衡或者轉子彎曲引起的動偏心。 圖9 不同轉速下軸心軌跡圖譜Fig.9 Spectrogram of axis center orbit at different speed 以極坐標下軸心軌跡的徑向幅值的平均值為轉子動偏心的衡量標準,對應不同轉速下定子電流中的特征頻率的幅值,得到表3 所示的模型。 表3 不同轉速下轉子動偏心的電流特征幅值與偏心狀況Tab.3 Comparison chart for amplitude of current signal and state of rotational eccentricity at different speed 表3 說明不同轉速下轉子動偏心狀況與電流特征幅值的對比情況。圖10 描述同一個存在動偏心的轉子,隨著轉速的提高,軸心軌跡的徑向均值有一定增長,同時,定子電流中的特征頻率處的幅值也隨之增長,并且趨勢基本一致。由此說明,在負載恒定的狀態下,隨著轉速的增加會引起轉子偏心的增大。 圖10 不同轉速下偏心狀況與電流特征幅值關系圖Fig.10 Correlation diagram for eccentric status and amplitude of current characteristics at different speeds 本文在研究了電機回轉偏心在定子電流信號表現規律的基礎上,針對實際偏心檢測中存在難檢測難識別的問題提出了具體的解決方法。通過對電機進行偏心測試實驗,對方法進行了驗證和應用。結果表明,利用電流信息與動態軸心軌跡可以有效地測量與估計電機的回轉偏心狀況。同時,也證明了通過電機定子電流信號對電機回轉偏心進行監測與診斷的有效性。 [1]梁霖.基于電流法的鼠籠異步電機故障特征提取及自動診斷[D].西安:西安交通大學,2001. [2]趙向陽,葛文韜.基于定子電流法監測無刷直流電動機轉子動態偏心的故障模型仿真研究[J].中國電機工程學報,2011,31(36):124-130.Zhao Xiangyang,Ge Wentao.Simulation research of fault model of detecting rotor dynamic eccentricity in brushless DC motor based on motor current signature analysis[J].Proceedings of the CSEE,2011,31(36):124-130. [3]寧玉泉.大型三相異步電機氣隙偏心的在線監測和故障診斷[J].大電機技術,1999(6):20-24.Ning Yuquan.On-line monitoring and fault diagnosing for eccentric gap of large 3-phase asynchronous machines[J].Large Electric Machine &Hydraulic Turbine,1999(6):20-24. [4]Liu Yukun,Guo Liwei,Wang Qixiang.Application to induction motor faults diagnosis of the amplitude recovery method combined with FFT[J].Mechanical Systems and Signal Processing,2010(24):2961-2971. [5]Jee Hoon Jung,Jong Jae Lee,Bong Hwan Kwon.Online diagnosis of induction motors using MCSA[J].IEEE Transactions on Industrial Electronics,2006,53(6):1842-1852. [6]Martins J F,Pires V F,Pires A J.Unsupervised neural-network-based algorithm for an on-line diagnosis of three-phase induction motor stator fault[J].IEEE Transactions on Industrial Electronics,2007,54(1):259-264. [7]Yacamini R,Smith K S,Ran L.Monitoring torsional vibrations of electro-mechanical systems using stator currents[J].Journal of Vibration and Acoustics,1998,120 (1):72-79. [8]Kia S H,Henao H,Capolino G A.Mechanical trans-mission and torsional vibration effects on induction machine stator current and torque in railway traction systems[C].IEEE Energy Conversion Congress and Exposition,2009:3182-3187. [9]沈標正.電機故障診斷技術[M].北京:機械工業出版社,1998. [10]屈梁生.故障診斷學[M].北京:機械工業出版社,1985.


2.2 電機回轉偏心的電流特征頻率





2.3 電機回轉偏心特征提取分析方法
3 電機回轉偏心電流頻率特征分析
3.1 電機回轉靜偏心電流頻率分析


3.2 電機回轉動偏心電流頻率分析



4 電機回轉偏心量化分析

4.1 電機回轉靜偏心量化分析

4.2 電機回轉動偏心量化分析


5 結論
