基于脈沖寬度預測的速度反饋機制研究
2014-11-25 09:27:52張永康張勇軍李華德
電工技術學報 2014年10期
張永康 張勇軍 王 京 李華德
(1.北京科技大學冶金工程研究院 北京 100083 2.北京科技大學自動化學院 北京 100083)
1 引言
隨著電力電子技術的飛速發展,交流電機變頻調速系統得到了廣泛應用,而速度傳感器在高性能交流電機變頻調速控制系統中具有舉足輕重的作用,同時由于工業環境的特殊性也使得速度傳感器成為控制系統的薄弱環節。首先,工業現場機械設備的振動和傳感器安裝的不規范使速度傳感器出現偏心現象,從而使反饋速度在每一轉的全局范圍內出現低頻振蕩,更甚者易使傳感器發生本體故障。其次,工業粉塵、氣體、油污以及接線不規范也會造成速度傳感器線路發生短路和斷路故障。另外,各類感性[1]、容性設備[2]和其他開關型設備[3]大量應用所帶來的電磁干擾,使速度傳感器信號的精度受到影響。因此,如何有效提高速度傳感器的可靠性和檢測精度已成為調速控制系統研究中的重要內容[4]。
由于速度傳感器安裝位置的偏心問題易引起反饋速度在每一轉的全局范圍內出現低頻振蕩,該類問題所引起的速度誤差需要經過特征提取和判斷過程,屬于信號辨識的范疇,無法從脈沖特征中解決,因此本文僅就速度傳感器的故障和干擾問題進行研究。國內外學者為解決速度傳感器故障和干擾問題所做的研究主要分為兩類,一類是無速度傳感器控制技術[5-8]。無速度傳感器控制技術雖然具有降低編碼器安裝復雜性和成本等優點,但在實際應用中還存在一些難以解決的問題。首先,電壓與電流信號檢測過程中引入的噪聲以及參數變化等使得無速度傳感器技術在低速運行時的控制相當困難[9]。其次,無速度傳感器技術在電機具有較高初速度情況下不具備快速啟動的能力,會引起系統速降與系統振蕩[10]。因此無速度傳感器技術無法完全滿足高性能調速系統的精度要求。另一類方法是對速度傳感器信號進行濾波的方法[11-14]。現有的硬件濾波方法主要是針對脈沖信號采用RC 低通濾波器實現特定頻率的干擾抑制,不具有普遍適用性。工程應用中的軟件濾波方法有低通濾波器、自適應濾波器、擴展卡爾曼濾波器、FIR 濾波器等,然而此類濾波器僅作用于經計數器轉換后的轉速信號,無法對原始脈沖信號進行干擾辨識和抑制。
為提高速度傳感器的可靠性和檢測精度,本文提出采用脈沖寬度預測方法解決傳感器故障和干擾問題。首先,從速度傳感器的原始脈沖信號入手,通過對速度檢測環節建立數學模型,推導出調速系統所能承受最大加速度情況下的速度傳感器信號占空比公式。其次,通過定義占空比失真度,得出不同轉動位置下的占空比變化規律,據此預測下一時刻傳感器脈沖寬度范圍,根據下一時刻計算所得的占空比失真度就可以辨識系統故障和干擾。為防止系統出現對傳感器偶發性故障和微小干擾過度敏感所引起的振蕩,選擇合適的故障容忍度和干擾容忍度來輔助故障和干擾的辨識。最后,建立基于擴張狀態觀測器的感應電機速度觀測環節,將故障、干擾辨識結果和擴張狀態觀測器觀測的速度相結合,建立相應的速度反饋機制。在實驗平臺上的測試結果證明了本文所述速度反饋機制的有效性。
2 速度傳感器脈沖寬度預測
2.1 速度檢測環節建模
實際工業應用中,速度傳感器以增量式編碼器為主。增量式編碼器輸出信號為脈沖信號,由于任何脈沖均具有上升沿和下降沿,為保證正常使用,速度傳感器均會有適用轉速范圍。在適用范圍內,傳感器送出的脈沖信號上升沿時間和下降沿時間對于整個脈沖周期來說可以忽略不計。因此,本文對傳感器信號的研究均在傳感器的適用轉速范圍內,忽略脈沖上升沿和下降沿時間的影響。系統穩態運行時該類型編碼器的理想信號波形為周期不變、占空比恒為50%的標準方波。受電磁干擾后的編碼器信號不但周期與占空比均發生了變化,而且信號中含有一些尖脈沖,增大了單位時間內的脈沖數,引入較大的轉速測量誤差。圖1 所示為增量式編碼器的原理圖。由于信號A、B僅相位不同,其他參數均相同,因此本文僅就A相信號進行分析。
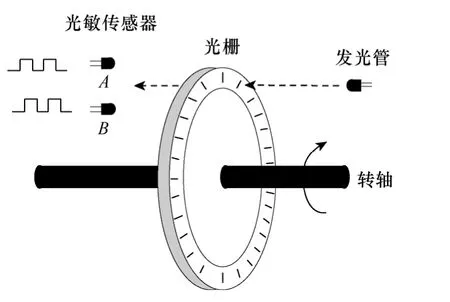
圖1 增量式編碼器原理圖Fig.1 Schematic of incremental encoder
編碼器光源掃過光柵的一個透光區和一個不透光區即送出一個周期的脈沖信號。設光源掃過光柵某個透光區域Sk所用時間為tk,掃過下一個相鄰不透光區域Sk+1所用時間為tk+1,則占空比表達式為
令k∈{1…N},則從零速開始掃過前k個光柵區域的時間與掃過的角度關系為
由式(3)得
則光源掃過第k個區域所用的時間為
同理掃過第k和k+1 區域的總時間為
將tk和tk+tk+1代入式(1)得占空比為
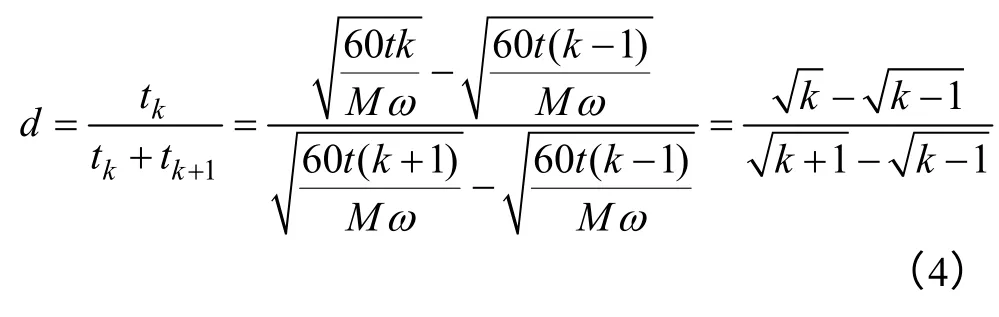
由于電機以最大勻減速度進行的減速過程是勻加速過程的反過程,故可以僅就加速過程分析編碼器信號。由式(4)可見,在最大勻加速過程中,編碼器信號的占空比與電機加速時間t、角加速度a、編碼器線數M以及電機額定轉速ω無關,僅與電機加速過程中光柵轉動的數量k有關,同樣也可以證明在以其他加速度下進行的速度變化過程也遵循此規律。由于電機在任意穩定轉速上進行的加減速均可以等效為最大加速度過程中某一階段的加減速過程,因此式(4)具有通用性。
2.2 脈沖寬度預測
為評判占空比失真的大小,定義單個脈沖的占空比失真度為

式中,d表示單個脈沖的占空比,0.5 表示標準方波脈沖的占空比(即50%)。由于式(4)具有通用性,而式(5)是式(4)的線性變換,因此式(5)在電機的加減速過程中也具有通用性。表1 所示為無電磁干擾情況下電機勻加速過程中編碼器光柵轉過的區域數目k、占空比d以及占空比失真度D關系。圖2 顯示了表1 中各個變量的變化趨勢。

圖2 占空比和占空比失真度趨勢圖Fig.2 Trend chart of the duty cycle and duty cycle distortion
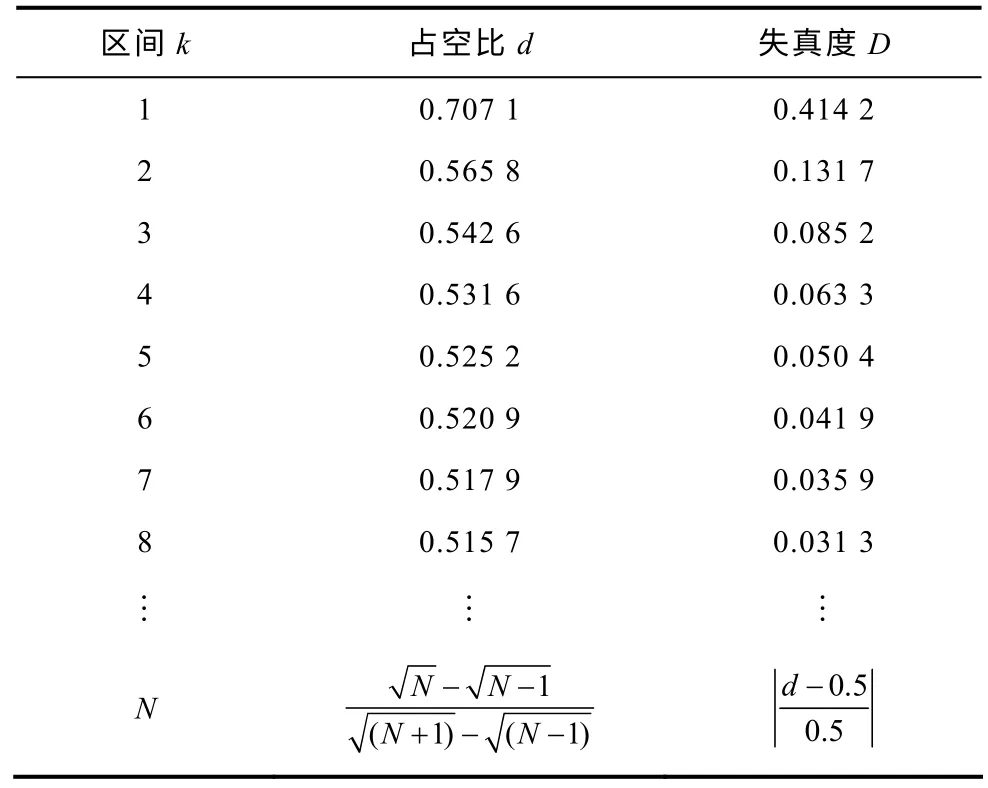
表1 電機加速過程中編碼器信號關系Tab.1 The relationship between k,d and D
由表1和圖2 可見,在電機最大勻加速過程中,編碼器信號占空比d按式(4)進行變化。從零速開始在光源轉過前25 個光柵區域的過程中,編碼器信號占空比具有較大變化,此后的區域中占空比d快速趨近于0.5。相應的占空比失真度D也具有相同的趨勢。由于式(4)和式(5)在電機加減速過程中具有通用性,因此在已知當前信號脈沖寬度的基礎上可以利用式(4)和式(5)預測下一脈沖的寬度,即編碼器信號脈沖寬度預測,以此實現對編碼器故障和干擾進行在線計算和判斷。
考慮到式(4)復雜的計算過程難于在普通DSP等數字處理芯片中完成,為提高故障和干擾的辨識速度和精度,節省計算資源,利用表1和圖2 的分析結果,設定合適的干擾容忍度D'(0<D'<1)將實際脈沖占空比失真度限定在一定的范圍內,以此實現簡化式(4)和式(5)的復雜計算過程。例如,檢測到當前時刻編碼器內部光源掃過光柵某一區域所用時間為tk,則預測光源掃過光柵下一區域所用時間tk+1滿足
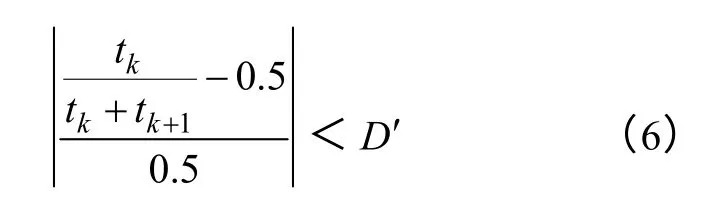
式(6)分解得tk+1的范圍為
若檢測到編碼器內部光源掃過光柵下一區域所用時間落在式(7)所示的范圍內,則表示脈沖信號正常,否則可以判定為干擾脈沖。
速度傳感器發生本體故障、線路短路或斷路故障易引起速度反饋丟失,此時應送出故障信息并采取相應措施。但是工業現場也可能發生由不可知因素引起的速度信號脈沖偶發性丟失,且信號連續丟失的個數較少,若將此類狀況歸入傳感器故障則會引起系統故障復位,降低了系統的魯棒性。為防止系統對傳感器偶發性故障過于敏感而引起系統復位,定義故障容忍度K。即從當前脈沖開始,預測下一脈沖的寬度tk+1,若連續Ktk+1個時間內沒有返回脈沖,則認為編碼器已經損壞,或者線路發生斷路或者短路。一旦K確認,則判定故障的時間僅與tk+1成正比,因此故障判定時間為可測值。另外,由于當轉速ω越快時,故障判定時間Ktk+1越短,更有利于系統的安全運行。
3 基于擴張狀態觀測器的速度觀測
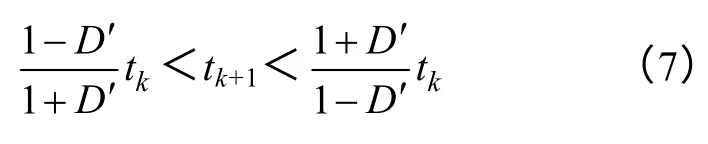
根據感應電機數學模型選擇定子電流和轉子磁鏈作為狀態變量,在兩相靜止坐標系下建立的感應電機狀態方程如式(8)所示[15]。
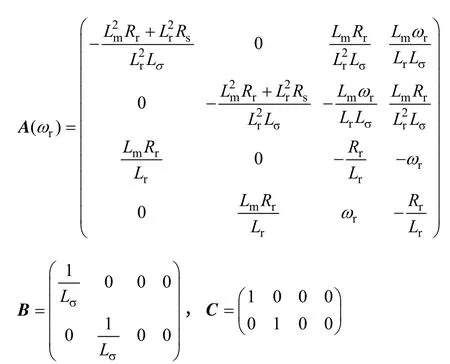
式中isα,isβ——定子電流;
usα,usβ——定子電壓;
ψsα,ψsβ——定子磁鏈;
ωr——轉子速度;
Rs——定子電阻;
Rr——轉子電阻;
Ls——定子電感;
Lr——轉子電感;
Lm——互感;
Lσ——漏感,
為解決觀測器開環結構下不能解決直流偏置和對擾動缺乏自適應調節能力的問題,考慮將觀測到的磁鏈作為已知量代入到上述模型中,形成閉環結構的擴張狀態觀測器,增強模型的確定程度,減輕觀測負擔。閉環磁鏈觀測模型如式(9)所示。
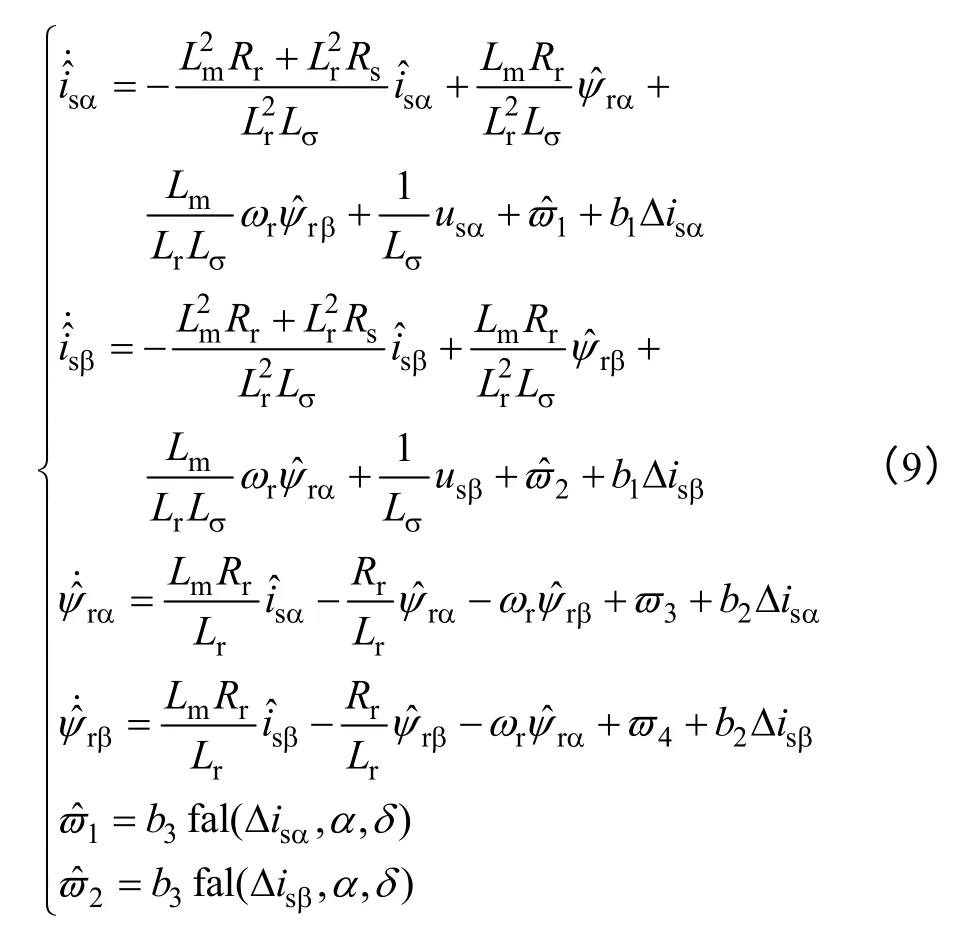
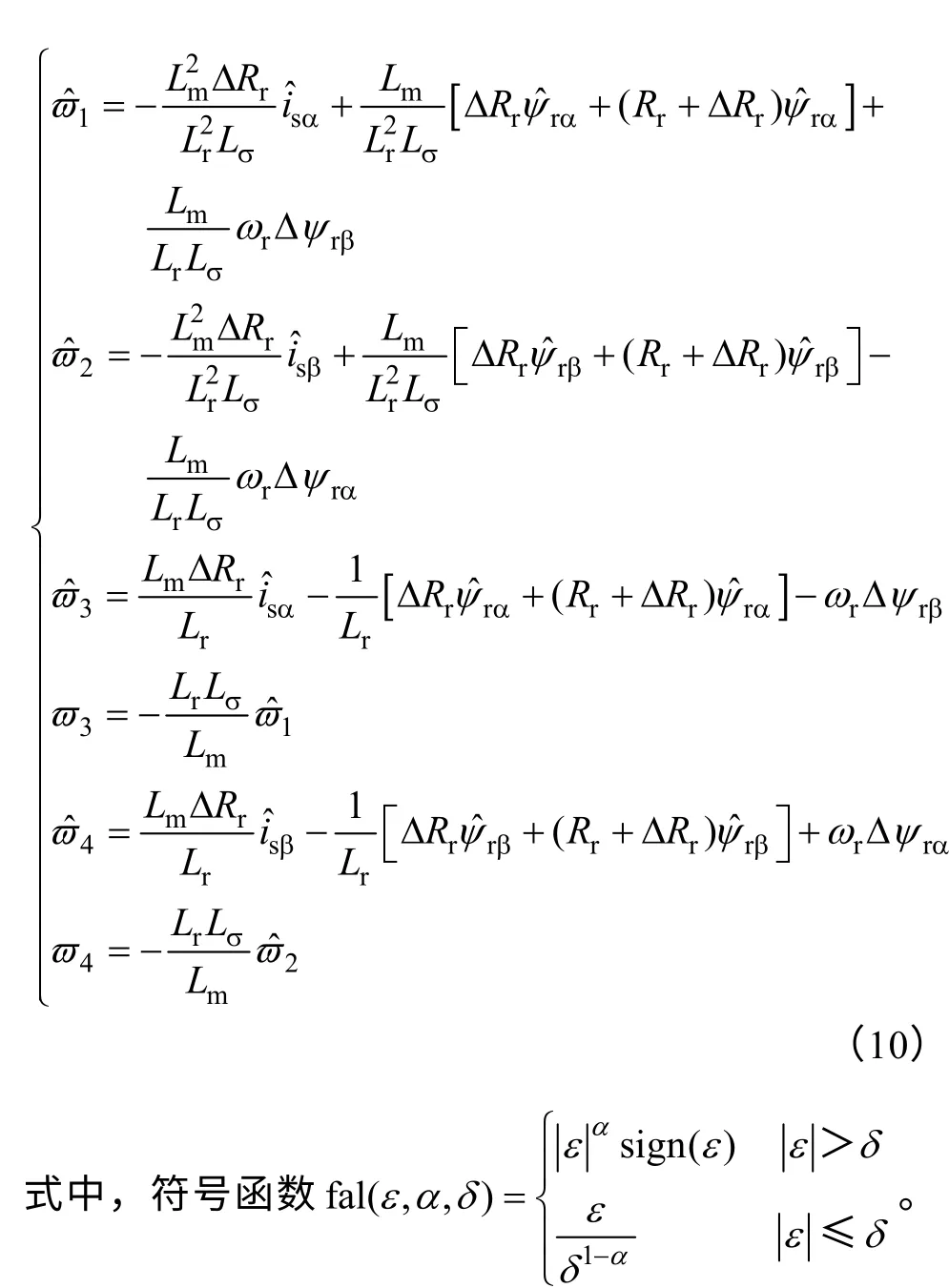
其中擴張的狀態如式(10)所示。
由Popov 穩定性理論從磁鏈觀測值中可得出轉速估計表達式為[16]

4 速度反饋機制設計
本文根據所提出的脈沖寬度預測方法建立了感應電機調速系統中的新型速度反饋機制,用于解決工程應用中速度傳感器本體故障、線路異常或信號受到電磁干擾等問題。
轉速測量方法是將編碼器信號直接進行計數處理。本文采用測量多個脈沖總時間的方法,即M/T法來計算電機轉速。若m1個脈沖的總時間為m2個系統采樣時間,容易推導出M/T 法的速度實測值計算式為
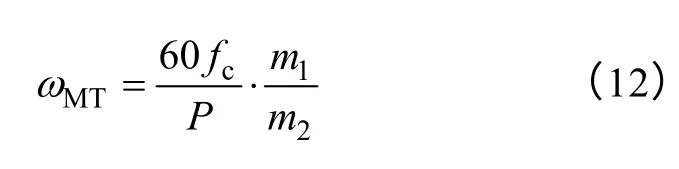
式中,fc為系統采樣頻率;P為增量式編碼器線數。低速時,編碼器單個脈沖持續時間較長,若繼續按照式(12)計算轉速,將大大增加系統的等待時間,為此增加以下前提條件:設定脈沖寬度上限Tk,若編碼器脈沖時間tk>Tk則ωMT=0,否則按照式(12)計算轉速。
若根據式(7)判定m1個脈沖中受干擾的脈沖個數為m3,可定義速度誤差率為DMT

DMT的值用于對編碼器信號干擾的補償。
速度反饋機制流程如圖3 所示。
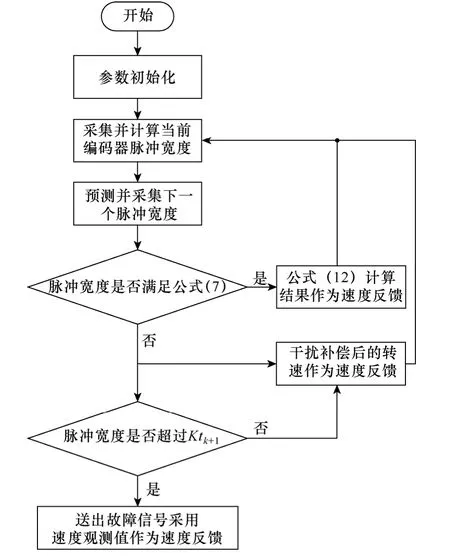
圖3 速度反饋流程圖Fig.3 Flowchart of speed feedback
該機制主要實現如下功能:
(1)系統上電后對故障容忍度和干擾容忍度等參數進行初始化。
(2)采集并計算當前編碼器信號的脈沖寬度tk,根據設定的干擾容忍度D'和式(7)預測下一脈沖的寬度范圍tk1+。
(3)采集下一脈沖的寬度tk'1+,判斷該寬度是滿足式(7)。若滿足則按照式(12)所表示的M/T法計算電機速度,以此結果作為速度反饋參加閉環控制。否則判定該脈沖為干擾脈沖,并對式(12)所表示的電機轉速進行干擾補償。將定義的速度誤差率為DMT作為補償的量度,采用線性加權式(14)將狀態觀測器觀測到的轉速補償到式(12)所表示的電機轉速中,補償后的轉速作為速度反饋參加閉環控制。

式(14)中右側第一項ωMT(1-DMT)表示速度傳感器實測值中不含干擾部分的速度反饋,第二項表示使用擴張狀態觀測器得到的速度觀測值補償掉速度傳感器實測值中的干擾。
(4)判斷當前脈沖寬度tk1+是否大于。若,則判定速度傳感器發生本體或線路故障,送出故障信號,并將狀態觀測器觀測到的電機轉速作為反饋速度參與閉環計算。若,繼續使用第(3)步中干擾補償后的轉速作為速度反饋參加閉環控制。
改進后的速度反饋結構如圖4 所示。其中ESO為式(9)和式(11)表示的基于擴張狀態觀測器的速度觀測模塊。M/T 算法為式(12)所表示的基于速度傳感器信號的速度計算模塊。速度誤差率計算為式(13)所表示的速度傳感器信號速度誤差率。
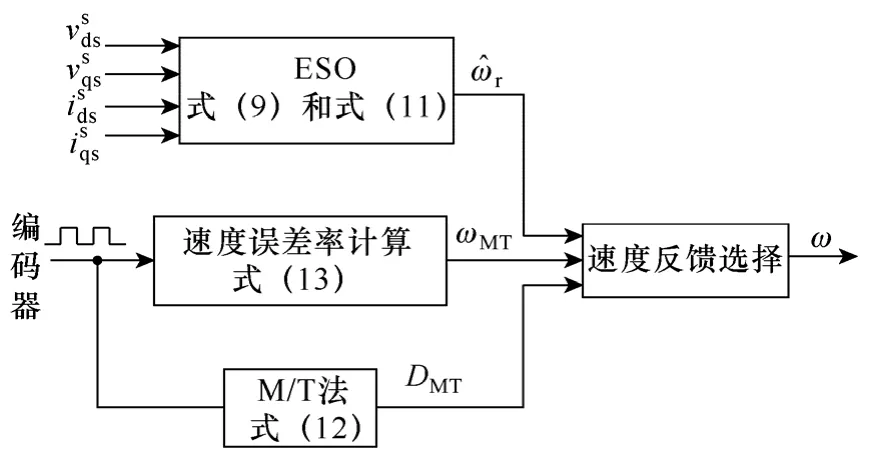
圖4 改進后的反饋通道框圖Fig.4 System diagram of improved speed feedback channel
5 實驗驗證
為驗證以上方法的有效性,本文在以TMS320-F2812 為算法運算核心、EP2C5T144 為邏輯運算核心的異步電動機變頻調速實驗平臺上進行系統實驗,實驗平臺結構如圖5 所示。其中感應電動機(IM)型號為西門子1LA7096—4AA,電機參數見表2;編碼器型號為西門子1XP8001—1/1024,每圈1 024線;示波器主要用于編碼器脈沖信號的測量與存儲;PC 的主要作用是調試程序和運行監控軟件,實時顯示和存儲電機運行中的參數。
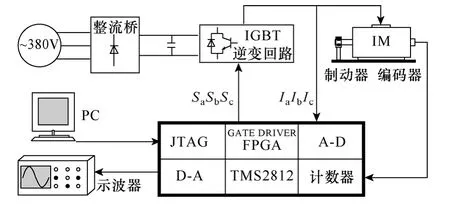
圖5 實驗系統構成Fig.5 Schematics of the experimental setup
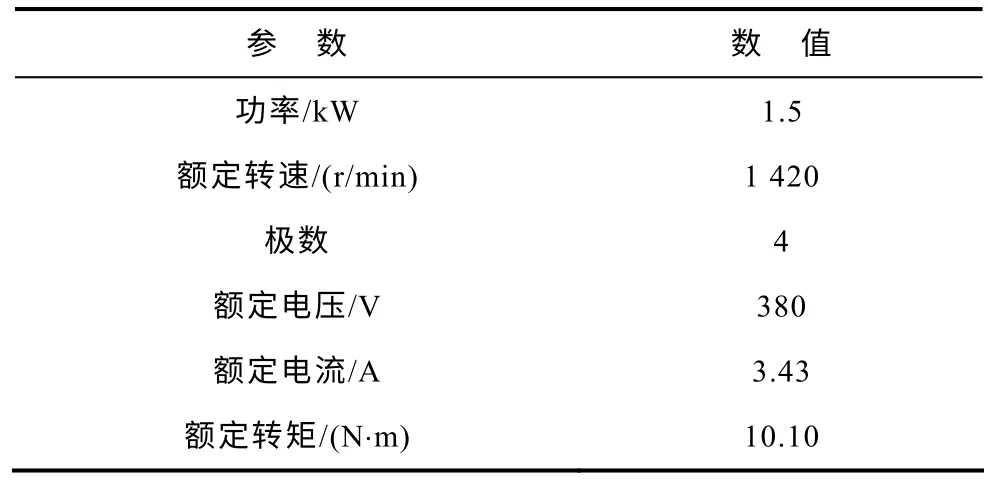
表2 感應電機參數Tab.2 Parameters of the induction motor
5.1 速度檢測環節模型驗證
實驗中系統的最大加速過程定義如下:電機轉速從零開始,經1.5s 達到額定轉速1 420r/min。加速過程中編碼器信號A 通道的波形如圖6 所示。將示波器波形數據存儲為.csv 文件,使用 Microsoft Excel 軟件對波形數據進行處理,得出編碼器光柵轉過的區域數目k、占空比d以及占空比失真度D關系見表3 所示,表中的占空比和占空比失真度與表1 相應數據僅有微小誤差,該誤差可歸為測量誤差。由對比結果可以證明式(4)所表示的速度檢測環節模型的正確性。
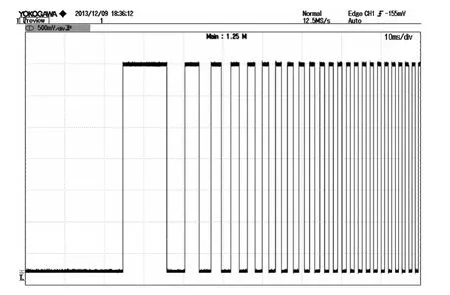
圖6 加速過程中的編碼器信號Fig.6 The encoder signal in the acceleration process
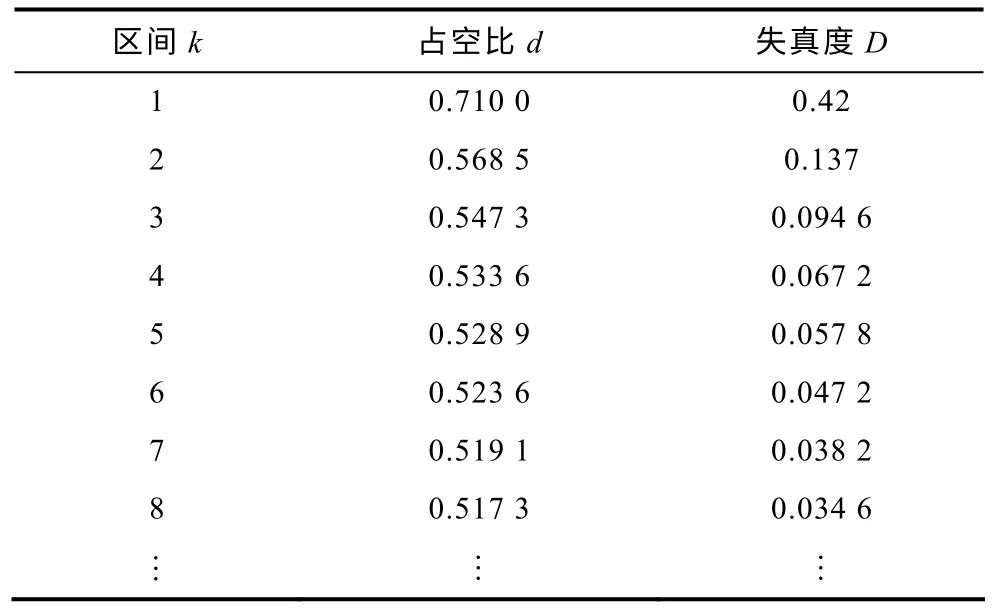
表3 實際電機加速過程中編碼器信號關系Tab.3 The relationship between k,d and D during the actual experiment
5.2 干擾容忍度和故障容忍度驗證
根據寬度預測方法,在FPGA 中使用Verilog HDL 語言實現對干擾容忍度和故障容忍度的檢測,實驗結果如圖7 所示。實驗中,設定干擾容忍度為D'=0.1,故障容忍度K=2,即連續丟失兩個以上脈沖寬度則認為編碼器出現線路故障。實驗中設定一個干擾指示IO 端口,當檢測到干擾脈沖時IO 端口電平進行一次翻轉;設定一個故障指示IO 端口,當判斷編碼器發生異常時輸出高電平。圖7a 所示為干擾容忍度的實驗波形,由圖可見當編碼器脈沖含有干擾脈沖時,通過相應的干擾容忍度判斷,可以準確地檢測到干擾脈沖。圖7b 所示為故障容忍度的實驗波形,由圖可見,由于故障容忍度設定為K=2,當連續丟失兩個脈沖寬度時,不認為發生故障,而判定為偶發性故障,但此時相應的干擾容忍度將該脈沖判定為干擾脈沖。當連續丟失三個脈沖寬度時,則判斷傳感器發生故障,送出故障指示信號,相應的干擾指示也進行翻轉。
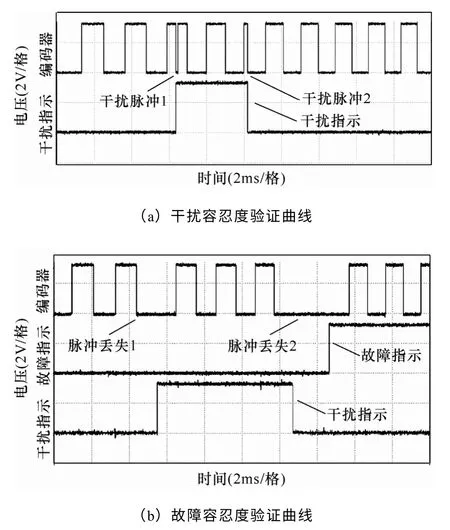
圖7 編碼器干擾和故障判定波形Fig.7 The encoder signal when interference and fault
5.3 擴張狀態速度觀測器實驗驗證
為驗證本文使用的擴張狀態觀測器的有效性,本文將無干擾情況下有速度傳感器矢量控制下的實際轉速與擴張狀態觀測器的速度觀測值進行對比,對比結果如圖8 所示,中間所示為勻速過程中的示波器放大圖。由圖可見,該觀測器僅在系統啟動初期具有較大觀測誤差,在系統加減速階段均能很好地觀測實際速度。由此證明擴張狀態觀測器在感應電機轉速觀測上的有效性。
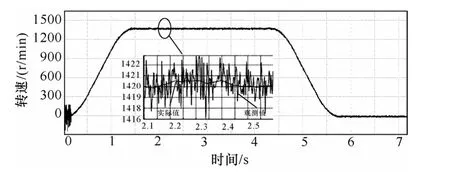
圖8 系統加減速過程的速度觀測曲線Fig.8 Waveforms of peed estimation between acceleration and deceleration
5.4 新型速度反饋機制下的干擾補償實驗驗證
圖9 所示為速度傳感器信號受較強電磁干擾時,按照式(14)進行干擾補償前后的速度變化曲線。實驗中設定轉速為1 000r/min,并采用FPGA將隨機干擾脈沖疊加到速度傳感器脈沖信號中,以此模擬工業現場的電磁干擾情況。由圖9 可見在3.6s時加入本文所述干擾補償方法后,速度振蕩有明顯的降低,顯著抑制了電磁干擾的影響,驗證了新型速度反饋機制下干擾補償的有效性。
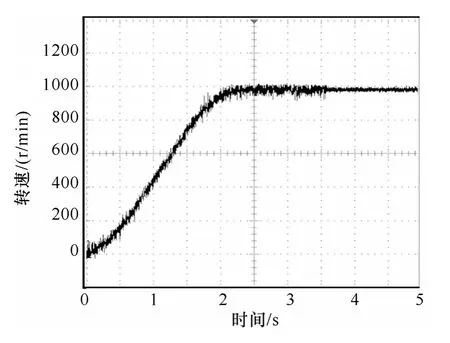
圖9 加入干擾補償方法前后的速度曲線Fig.9 Speed waveforms before and after disturbance-compensation
5.5 新型速度反饋機制下的故障辨識實驗驗證
圖10 顯示了無干擾情況下速度傳感器發生故障前后的速度變化情況。實驗中設定轉速為900r/min,在FPGA 中設定3.3s 時切斷編碼器的脈沖信號。由圖可見,在故障瞬間實際速度僅有2%的跌落,并在0.3s 內恢復到額定值,雖然速度有波動,但是仍能保證系統正常運行,由此可驗證新型速度反饋機制下故障診斷的有效性。
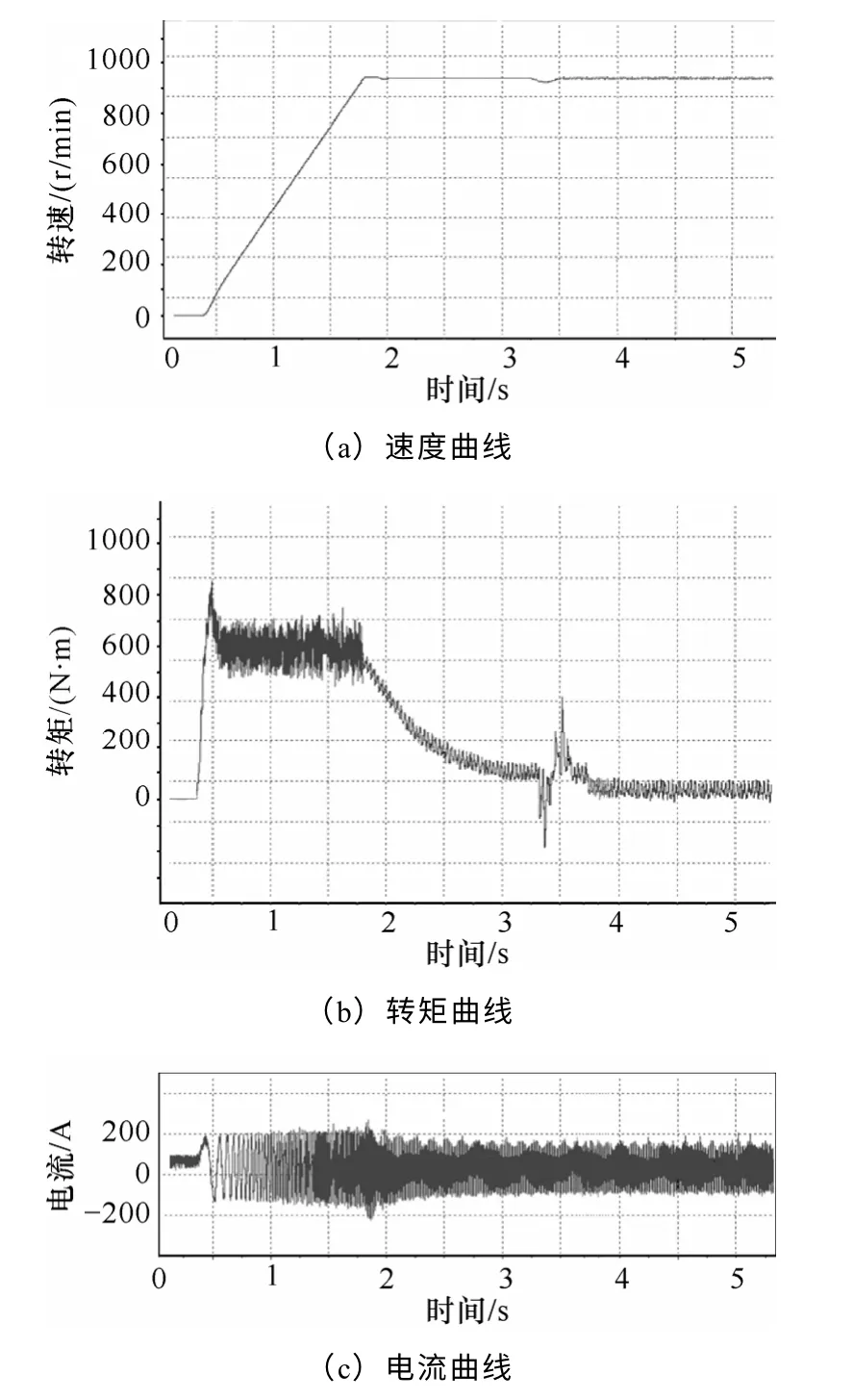
圖10 速度傳感器發生故障后的系統反應曲線Fig.10 System waveforms when speed sensor failures
6 結論
本文針對交流調速系統中速度傳感器易發生故障和受干擾的問題,推導并建立了傳感器數學模型,首次提出脈沖寬度預測的方法,通過預測下一時刻傳感器脈沖寬度范圍,可有效辨識傳感器故障和信號干擾。通過引入干擾容忍度和故障容忍度的概念,提高了辨識速度,并將辨識結果、轉速實測值以及基于擴張狀態觀測器的感應電機速度觀測值進行有效的整合,建立一套新型的交流調速系統速度反饋機制。實驗結果驗證了傳感器信號模型、脈沖寬度預測和所提出的新型速度反饋機制的有效性,并表明該反饋機制能夠有效防止速度傳感器故障及電磁干擾對系統造成的沖擊,提高了高性能交流調速控制系統的抗干擾能力,具有較高的工程實用性。
[1]李曉明,梁軍,王葵,等.開關特性飽和電抗器原理及其實驗[J].電力系統保護與控制,2012,40(23):132-137.Li Xiaoming,Liang Jun,Wang Kui,et al.Principle and testing of a saturable reactor with switch characteristic[J].Power System Protection and Control,2012,40(23):132-137.
[2]吳勇海,蔡金錠.中壓配電網串聯電容補償調壓技術研究及應用[J].電力系統保護與控制,2012,40(13):140-143.Wu Yonghai,Cai Jinding.Study and application of voltage regulation technology by series capacitance compensation in medium voltage distribution network.[J].Power System Protection and Control,2012,40(13):140-143.
[3]呂學志,康忠健,梅永超.基于無源性理論的電壓不平衡條件下 PWM 整流器非線性控制策略[J].電力系統保護與控制,2013,41(6):71-76.Lü Xuezhi,Kang Zhongjian,Mei Yongchao.Nonlinear control of PWM rectifier based on passivity theory under unbalanced grid voltage[J].Power System Protection and Control,2013,41(6):71-76.
[4]周東華,胡艷艷.動態系統的故障診斷技術[J].自動化學報,2009,35(6):748-758.Zhou Donghua,Hu Yanyan.Fault diagnosis techniquesfor dynamic systems[J].Acta Automatica Sinica,2009,35(6):748-758.
[5]張永昌,趙爭鳴.基于自適應觀測器的異步電機無速度傳感器模糊矢量控制[J].電工技術學報,2010,25(3):40-47.Zhong Yongchang,Zhao Zhengming.Speed sensorless fuzzy vector control of induction motor using an adaptive observer[J].Transactions of China Electrotechnical Society,2010,25(3):40-47.
[6]Holtz J.Sensorless control of induction machines–with or without signal injection? [J].IEEE Transactions on Industrial Electronics,2006,53(1):7-30.
[7]王高林,楊榮峰,于泳,等.無速度傳感器異步電機轉子磁場定向自適應魯棒控制[J].電工技術學報,2010,25(10):73-80.Wang Gaolin,Yang Rongfeng,Yu Yong,et al.Adaptive robust control for speed sensorless fieldoriented controlled induction motor drives[J].Transactions of China Electrotechnical Society,2010,25(10):73-80.
[8]李珍國,李彩紅,闞志忠,等.基于改進型簡化磁鏈法的開關磁阻電機無位置傳感器速度控制[J].電工技術學報,2010,26(6):62-66.Li Zhenguo,Li Caihong,Kan Zhizhong,et al.Switched reluctance motor sens orless speed control based on the improved simplified flux method[J].Transactions of China Electrotechnical Society,2010,26(6):62-66.
[9]鄧歆,趙金.異步電機無速度傳感器控制系統中磁場跟蹤控制器設計[J].電工技術學報,2010,25(5):82-87.Deng Xin,Zhao Jin.Magnetic field tracking controller in speed sensorless induction motor drive[J].Transactions of China Electrotechnical Society,2010,25(5):82-87.
[10]尚敬,劉可安,馮江華.牽引電動機無速度傳感器及帶速度重投控制[J].中國電機工程學報,2006,26(15):118-123.Shang Jing,Liu Kean,Feng Jianghua.Speed sensorless control and restarting at unknown speed of traction motor[J].Proceedings of the CSEE,2006,26(15):118-123.
[11]程遠楚,徐德鴻,劉燕.基于瞬時無功理論的 SVC低通濾波器設計與應用[J].電工技術學報,2008,23(9):138-143.Cheng Yuanchu,Xu Dehong,Liu Yan.Design and Application of low-pass filter based on instantaneous reactive theory[J].Transactions of China Electrotechnical Society,2008,23(9):138-143.
[12]王新.自適應濾波器的新型變步長算法及其應用[J].電機與控制學報,2011,15(4):23-27.Wang Xin.Novel variable step size algorithm of adaptive filter and its application[J].Electric Machines and Control,2011,15(4):23-27.
[13]李劍飛,尹泉,萬淑蕓.基于擴展卡爾曼濾波器的異步電機轉速辨識[J].電工技術學報,2002,17(5):40-44.Li Jianfei,Yin Quan,Wan Shuyun.Identify the rotor speed of an asynchronous motor by using the extended Kalman filter[J].Transactions on China Electrotechnical Society,2002,17(5):40-44.
[14]蔣立平,譚雪琴,王建新.一種基于 FPGA 的高效FIR 濾波器的設計與實現[J].南京理工大學學報,2007,31(1):125-128.Jiang Liping,Tan Xueqin,Wang Jianxin.Design and implementation of efficient FIR filter based on FPGA[J].Journal of Nanjing University of Science and Technology,2007,31(1):125-128.
[15]蘇位峰,孫旭東,李發海.基于ESO 的異步電機無速度傳感器矢量控制[J].清華大學學報,2005,45(4):565-566.Su Weifeng,Sun Xudong,Li Fahai.ESO-based sensorless vector control of induction motors[J].Journal of Tsinghua University,2005,45(4):565-566.
[16]李永東.交流電機數字控制系統[M].北京:機械工業出版社,2012.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34